Potrebbero piacerti anche
- Lucidi MetallurgiaDocumento276 pagineLucidi MetallurgiaAndreaNessuna valutazione finora
- Statica - Esercizi e Soluzioni Di Azioni InterneDocumento22 pagineStatica - Esercizi e Soluzioni Di Azioni InterneAndreaNessuna valutazione finora
- Disegno Tecnico - DispenseDocumento322 pagineDisegno Tecnico - DispenseAndreaNessuna valutazione finora
- La Metallurgia Delle PolveriDocumento31 pagineLa Metallurgia Delle PolveriAndreaNessuna valutazione finora
- Esercizi Di Fonderia 9-f2Documento14 pagineEsercizi Di Fonderia 9-f2AndreaNessuna valutazione finora
- Fisica Tecnica I - 01 - EserciziDocumento6 pagineFisica Tecnica I - 01 - Esercizi43346080Nessuna valutazione finora
- TheoryDocumento64 pagineTheoryDavide TroianiNessuna valutazione finora
- 647 - Stato Di Tensione e Cerchio Di Mohr-CarloDocumento14 pagine647 - Stato Di Tensione e Cerchio Di Mohr-CarloAida Cristina CaramihaiNessuna valutazione finora
- Trasformzione Delle Tensioni - MohrDocumento34 pagineTrasformzione Delle Tensioni - MohrCarmine CapuanoNessuna valutazione finora
- 1 Tensio0Documento19 pagine1 Tensio0Mc SparkNessuna valutazione finora
- Il Problema Di de Saint Venant-Soluzione AnaliticaDocumento8 pagineIl Problema Di de Saint Venant-Soluzione AnaliticaLeonardo GherlinzoniNessuna valutazione finora
- RecipientiDocumento13 pagineRecipientipaulNessuna valutazione finora
- Riassunto TeoriaDocumento7 pagineRiassunto TeoriaMichele BrunNessuna valutazione finora
- Scienza Delle CostruzioniDocumento175 pagineScienza Delle CostruzioniPiergianni GhidottiNessuna valutazione finora
- Domande Compl. Costruz. Di MacchineDocumento60 pagineDomande Compl. Costruz. Di MacchineLucaScott78Nessuna valutazione finora
- MCS 2022 Esempio Trave PianaDocumento7 pagineMCS 2022 Esempio Trave Pianamichele peraniNessuna valutazione finora
- 15 Tension I Principal IDocumento12 pagine15 Tension I Principal ImarcopasottiNessuna valutazione finora
- Esercizii Di Meccanica Dei SolidiDocumento11 pagineEsercizii Di Meccanica Dei Solidimart.simone1Nessuna valutazione finora
- Flessione Composta SVDocumento6 pagineFlessione Composta SVJNessuna valutazione finora
- Analisi Della TensioneDocumento32 pagineAnalisi Della TensioneAnonymous RQYJSIgV100% (1)
- 2 - Analisi Della Tensione12Documento29 pagine2 - Analisi Della Tensione12Bla'wof 69Nessuna valutazione finora
- Appunti Costruzioni VanvitelliDocumento185 pagineAppunti Costruzioni VanvitelliMarcoNessuna valutazione finora
- Scienza Delle Costruzioni 1Documento52 pagineScienza Delle Costruzioni 1Jonathan Corda100% (1)
- TENSIONI Su Piani Obliqui Rispetto Alla Direzione Dello SforzoDocumento15 pagineTENSIONI Su Piani Obliqui Rispetto Alla Direzione Dello Sforzodpiperis1118Nessuna valutazione finora
- Teoria ElasticitaDocumento10 pagineTeoria ElasticitaMarco CotrinoNessuna valutazione finora
- I Principi Fondamentali Della Deformazione PlasticaDocumento64 pagineI Principi Fondamentali Della Deformazione PlasticaAntonioRandoNessuna valutazione finora
- Tetraedro Di Cauchy e DeformazioniDocumento8 pagineTetraedro Di Cauchy e DeformazionicodraNessuna valutazione finora
- Teorema Di CauchyDocumento4 pagineTeorema Di CauchyPaolo AnzilNessuna valutazione finora
- STATICA EserciziDocumento9 pagineSTATICA EserciziLuca LopezNessuna valutazione finora
- Meccanica StruttureDocumento85 pagineMeccanica StruttureCARMELONessuna valutazione finora
- Il Gioco Delle Forze Estratto 21 32Documento12 pagineIl Gioco Delle Forze Estratto 21 32mariobrega89Nessuna valutazione finora
- Comp M2Documento33 pagineComp M2marcoNessuna valutazione finora
- (Ebook - Ing - Ita) Scienza Delle Costruzioni - Quesiti Con Risposte (230 Pag)Documento230 pagine(Ebook - Ing - Ita) Scienza Delle Costruzioni - Quesiti Con Risposte (230 Pag)Stefano VintoNessuna valutazione finora
- Soluzioni Del Metodo Dell'equilibrio Limite Globale Per L'analisi Di Stabilità Dei VersantiDocumento22 pagineSoluzioni Del Metodo Dell'equilibrio Limite Globale Per L'analisi Di Stabilità Dei Versantimassimo.bochioloNessuna valutazione finora
- LezioniMM 8b 9 AppendiceDocumento4 pagineLezioniMM 8b 9 Appendiceemmene freNessuna valutazione finora
- Meccanica Del ContinuoDocumento211 pagineMeccanica Del Continuoasantori6133Nessuna valutazione finora
- Disp Statica 1 PDFDocumento14 pagineDisp Statica 1 PDFLuigiNessuna valutazione finora
- Linea ElasticaDocumento180 pagineLinea ElasticaMarco LeonoriNessuna valutazione finora
- Esercizi Meccanica Del ContinuoDocumento14 pagineEsercizi Meccanica Del ContinuoBrandy JohnsonNessuna valutazione finora
- Le Funzioni EsponenzialiDocumento17 pagineLe Funzioni EsponenzialiElvisNessuna valutazione finora
- ST-03. Cerchio Di MohrDocumento10 pagineST-03. Cerchio Di MohrLuca Sepe100% (1)
- Dispensa N.4Documento15 pagineDispensa N.4fffiiutghyNessuna valutazione finora
- DownloadDocumento2 pagineDownloadGrazia LeverNessuna valutazione finora
- Flessione Plus Geometria Aree Ver 11 CompressedDocumento59 pagineFlessione Plus Geometria Aree Ver 11 CompressedimphudaNessuna valutazione finora
- MotoDocumento10 pagineMotogigingNessuna valutazione finora
- Temi Esame PDFDocumento92 pagineTemi Esame PDFFrancesca De PariNessuna valutazione finora
- Cinematica Derivate PDFDocumento5 pagineCinematica Derivate PDFuuqsoNessuna valutazione finora
- AiryDocumento61 pagineAiryLeo LonardelliNessuna valutazione finora
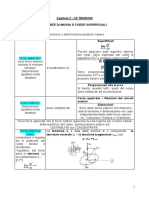
- Capitolo 2: LE TENSIONI Forze Di Massa E Forze SuperficialiDocumento11 pagineCapitolo 2: LE TENSIONI Forze Di Massa E Forze SuperficialiGianfranco PerilliNessuna valutazione finora
- MCS 2022 PPSDocumento12 pagineMCS 2022 PPSmichele peraniNessuna valutazione finora
- Studio Delle Lesioni Parte 1Documento11 pagineStudio Delle Lesioni Parte 1BeatriceBaffoniNessuna valutazione finora
- 10 Onde PianeDocumento49 pagine10 Onde PianeAndrea AtzeniNessuna valutazione finora
- Teoria 02. Statica - v1.2 PDFDocumento18 pagineTeoria 02. Statica - v1.2 PDFAlaa AwadNessuna valutazione finora
- Esercizi Saint VenantDocumento15 pagineEsercizi Saint VenantBrandy JohnsonNessuna valutazione finora
- Lezione Spinta Attive e Passiva (Rankine)Documento16 pagineLezione Spinta Attive e Passiva (Rankine)DonatoNessuna valutazione finora
- FlessioneDocumento66 pagineFlessionejessica borrielloNessuna valutazione finora
- FISI-Lezione 09 - 04.04.2016 REVDocumento15 pagineFISI-Lezione 09 - 04.04.2016 REVMalec17Nessuna valutazione finora
- Teorie Fisico Matematiche Dispensa N. 4: E B E B E B CDocumento11 pagineTeorie Fisico Matematiche Dispensa N. 4: E B E B E B CGiacomina SgròNessuna valutazione finora
- 2 Azioni Interne Piastre IsotropeDocumento11 pagine2 Azioni Interne Piastre IsotropeAleksiey PellicciaNessuna valutazione finora
- Trasformazioni Geometriche Nel Piano Parte1Documento5 pagineTrasformazioni Geometriche Nel Piano Parte1Alessandro LupoNessuna valutazione finora
- La Teoria Di HertzDocumento15 pagineLa Teoria Di HertzGianfranco Di MartinoNessuna valutazione finora
- FisicaI TsDocumento4 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Aula 6 - Flexão PARTE 1 e 2Documento49 pagineAula 6 - Flexão PARTE 1 e 2Layzza Tardin da Silva SoffnerNessuna valutazione finora
- I Processi Tecnologici - FonderiaDocumento31 pagineI Processi Tecnologici - FonderiaAndreaNessuna valutazione finora
- Metallurgia 2Documento60 pagineMetallurgia 2AndreaNessuna valutazione finora
- Leghe Di Alluminio Da FonderiaDocumento14 pagineLeghe Di Alluminio Da FonderiaAndreaNessuna valutazione finora
- Fonderia - Solidificazione (POLIMI, Meccanica)Documento26 pagineFonderia - Solidificazione (POLIMI, Meccanica)AndreaNessuna valutazione finora
- Serbatoi in Acciaio A Parete SottileDocumento7 pagineSerbatoi in Acciaio A Parete SottileAndreaNessuna valutazione finora
- Metallurgia RugositaDocumento15 pagineMetallurgia RugositaAndreaNessuna valutazione finora
- Cinematica - Cinematica Del Corpo RigidoDocumento23 pagineCinematica - Cinematica Del Corpo RigidoAndreaNessuna valutazione finora
- Metallurgia Della Saldatura, Cenni Di CorrosioneDocumento29 pagineMetallurgia Della Saldatura, Cenni Di CorrosioneAndreaNessuna valutazione finora
- Vari - Molla Ad Elica CilindricaDocumento8 pagineVari - Molla Ad Elica CilindricaAndreaNessuna valutazione finora
- Statica - Esercizi e Soluzioni Macchine SempliciDocumento14 pagineStatica - Esercizi e Soluzioni Macchine SempliciAndreaNessuna valutazione finora
- Statica - ForzeDocumento7 pagineStatica - ForzeAndreaNessuna valutazione finora
- Dispense - EC2 Progettazione Strutture Calcestruzzo Parte 1-1Documento57 pagineDispense - EC2 Progettazione Strutture Calcestruzzo Parte 1-1AndreaNessuna valutazione finora
- Cinematica - Quadrilatero Articolato A Manovella e BilanciereDocumento12 pagineCinematica - Quadrilatero Articolato A Manovella e BilanciereAndreaNessuna valutazione finora
- Cinematica - Esercizi e Soluzioni Di Analisi CinematicaDocumento14 pagineCinematica - Esercizi e Soluzioni Di Analisi CinematicaAndreaNessuna valutazione finora
- Giunti Flangiati SAIPEM - 6a Giornata - 06-05-09Documento34 pagineGiunti Flangiati SAIPEM - 6a Giornata - 06-05-09AndreaNessuna valutazione finora
- Pompe VolumetricheDocumento11 paginePompe VolumetricheAndreaNessuna valutazione finora
- Verifica A Fatica SAIPEM - 6a Giornata - 06-05-09Documento21 pagineVerifica A Fatica SAIPEM - 6a Giornata - 06-05-09AndreaNessuna valutazione finora
- Dispensa PompeDocumento14 pagineDispensa PompeAndreaNessuna valutazione finora
- Similitudine IdraulicaDocumento11 pagineSimilitudine IdraulicaAndreaNessuna valutazione finora
- Pompe Alternative e RotativeDocumento9 paginePompe Alternative e RotativeAndreaNessuna valutazione finora
- Pompe CentrifugheDocumento14 paginePompe CentrifugheAndreaNessuna valutazione finora
- Tecnologia Meccanica-FresaturaDocumento30 pagineTecnologia Meccanica-FresaturaAndreaNessuna valutazione finora
- EfwDocumento11 pagineEfwFabio PolimiNessuna valutazione finora
- Calorimetro Delle Mescolanze2 - 0Documento5 pagineCalorimetro Delle Mescolanze2 - 0Mattia BeniniNessuna valutazione finora
- 1 Generalita Sulle PompeDocumento14 pagine1 Generalita Sulle Pompegioscorza2Nessuna valutazione finora
- Progetto CarrelloDocumento4 pagineProgetto CarrelloAndreaConcilioNessuna valutazione finora
- FT5E - Termodinamica Degli Stati - Esercizi Gas IdealiDocumento6 pagineFT5E - Termodinamica Degli Stati - Esercizi Gas IdealiTonia FrassoNessuna valutazione finora
- Analisi Dinamico-Meccanica in Sistemi ViscoelasticiDocumento36 pagineAnalisi Dinamico-Meccanica in Sistemi ViscoelasticiAlbert RocNessuna valutazione finora
- Instabilità Torsionale e Flesso-Torsionale (Svergolamento)Documento21 pagineInstabilità Torsionale e Flesso-Torsionale (Svergolamento)gigingNessuna valutazione finora