Potrebbero piacerti anche
- C.malanga Lo Spazio Dei SuoniDocumento25 pagineC.malanga Lo Spazio Dei SuoniericfontNessuna valutazione finora
- Linea ElasticaDocumento180 pagineLinea ElasticaMarco LeonoriNessuna valutazione finora
- Esercizi svolti di Matematica: Geometria AnaliticaDa EverandEsercizi svolti di Matematica: Geometria AnaliticaNessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Matt Compierchio100% (1)
- Complementi Di Scienza Delle CostruzioniDocumento69 pagineComplementi Di Scienza Delle CostruzioniSalvatore Di PasqualeNessuna valutazione finora
- Misure Meccaniche Termiche EsercitazioniDocumento51 pagineMisure Meccaniche Termiche EsercitazioniAlessandro LupoNessuna valutazione finora
- Nozioni Di Geometria DifferenzialeDocumento199 pagineNozioni Di Geometria DifferenzialeGiamaicoNessuna valutazione finora
- Surperfici BaseDocumento560 pagineSurperfici BaseRocco Di PalmaNessuna valutazione finora
- Esercizi di matematica: geometria analitica elementareDa EverandEsercizi di matematica: geometria analitica elementareValutazione: 5 su 5 stelle5/5 (1)
- SCH 04Documento12 pagineSCH 04manik birdiNessuna valutazione finora
- OmetricheDocumento30 pagineOmetricheAlessioNessuna valutazione finora
- Trasformazioni Geometriche Nel Piano Parte2Documento6 pagineTrasformazioni Geometriche Nel Piano Parte2Alessandro LupoNessuna valutazione finora
- Ebook - GeometriaDocumento22 pagineEbook - GeometriaBadia BiaNessuna valutazione finora
- Trasformazioni GeometricheDocumento8 pagineTrasformazioni GeometricheFranco Di CiocchisNessuna valutazione finora
- La RettaDocumento4 pagineLa RettaEnsemble Flos VocalisNessuna valutazione finora
- Ottobre 2007 Pillole Di Matematica Trasformazioni Nel PianoDocumento27 pagineOttobre 2007 Pillole Di Matematica Trasformazioni Nel Pianoalfredo rizzoliNessuna valutazione finora
- Dispensa N.4Documento15 pagineDispensa N.4fffiiutghyNessuna valutazione finora
- Geometria AnaliticaDocumento4 pagineGeometria AnaliticaJuan Camilo Sanchez MarinNessuna valutazione finora
- Il Campo RotanteDocumento20 pagineIl Campo RotanteAndreaRaviolaNessuna valutazione finora
- Trasformazioni GeometricheDocumento4 pagineTrasformazioni GeometrichePeppe 03 TM (Giuseppe Carlomagno)Nessuna valutazione finora
- FORMULARIO_IMQDocumento3 pagineFORMULARIO_IMQSara RussoNessuna valutazione finora
- Forme QuadraticheDocumento5 pagineForme QuadratichealfonsoNessuna valutazione finora
- Esercizi PDFDocumento15 pagineEsercizi PDFLuigi D. PivaNessuna valutazione finora
- Fisica MatematicaDocumento84 pagineFisica MatematicaMarco TrentiNessuna valutazione finora
- Autovalori e Autovettori Matrici PDFDocumento9 pagineAutovalori e Autovettori Matrici PDFGanugio MirianiNessuna valutazione finora
- Geometria Analitica - PpsDocumento31 pagineGeometria Analitica - PpsAntonio GiaquintoNessuna valutazione finora
- Coniche e MatriciDocumento8 pagineConiche e MatriciAngelo NobiliNessuna valutazione finora
- Lezione 1Documento14 pagineLezione 1Riccardo RubiniNessuna valutazione finora
- Lunghezza Di Una CurvaDocumento45 pagineLunghezza Di Una CurvaFrancesco PetrilloNessuna valutazione finora
- (Scienze Delle Costruzioni e Costruzioni Di Macchine) Analisi Della Deformazione Dal FranciosiDocumento15 pagine(Scienze Delle Costruzioni e Costruzioni Di Macchine) Analisi Della Deformazione Dal FranciosiGianfranco PerilliNessuna valutazione finora
- Astrologia Con Matrici Di RotazioneDocumento6 pagineAstrologia Con Matrici Di RotazioneCutelaria SaladiniNessuna valutazione finora
- Le Equazioni Parametriche Di Una CurvaDocumento6 pagineLe Equazioni Parametriche Di Una CurvaLeonelloNessuna valutazione finora
- SoluzioniDocumento3 pagineSoluzionikiaraNessuna valutazione finora
- Rappresentazione RettaDocumento8 pagineRappresentazione RettaCristian GolfariniNessuna valutazione finora
- Cap 04Documento28 pagineCap 04nome.cognomenumNessuna valutazione finora
- RettaDocumento12 pagineRettaFilippa Luana SquatritoNessuna valutazione finora
- Trasformzione Delle Tensioni - MohrDocumento34 pagineTrasformzione Delle Tensioni - MohrCarmine CapuanoNessuna valutazione finora
- 2239.esercitazione 08 271112Documento14 pagine2239.esercitazione 08 271112AnaNessuna valutazione finora
- Cubiche e QuadricheDocumento6 pagineCubiche e Quadricheil signore dei sogniNessuna valutazione finora
- Dispensa A (3a Liceo-Luoghi GeometriciDocumento4 pagineDispensa A (3a Liceo-Luoghi GeometriciGiammi92100% (1)
- Moti CentraliDocumento5 pagineMoti CentraliRoberto GialliNessuna valutazione finora
- Note Sulla Dinamica Dei Corpi RigidiDocumento29 pagineNote Sulla Dinamica Dei Corpi RigidiMichele MassaNessuna valutazione finora
- 04-Metodo SimbolicoDocumento11 pagine04-Metodo SimbolicoSara SaidaNessuna valutazione finora
- Moto in Due o Tre DimensioniDocumento8 pagineMoto in Due o Tre DimensioniSimone VigoNessuna valutazione finora
- Matematica EsameDocumento5 pagineMatematica EsameFrancescaNessuna valutazione finora
- Analisi 2Documento392 pagineAnalisi 2Michele ScipioniNessuna valutazione finora
- La Circonferenza Nel Piano CartesianoDocumento34 pagineLa Circonferenza Nel Piano CartesianorosagiuliaNessuna valutazione finora
- Diffeomorfismi e FlussiDocumento54 pagineDiffeomorfismi e FlussimicantenNessuna valutazione finora
- 647 - Stato Di Tensione e Cerchio Di Mohr-CarloDocumento14 pagine647 - Stato Di Tensione e Cerchio Di Mohr-CarloAida Cristina CaramihaiNessuna valutazione finora
- Geometria AnalíticaDocumento8 pagineGeometria AnalíticaChristian TorresNessuna valutazione finora
- Quadri CheDocumento22 pagineQuadri CheGiovanni GiuffridaNessuna valutazione finora
- La Teoria Di HertzDocumento15 pagineLa Teoria Di HertzGianfranco Di MartinoNessuna valutazione finora
- Scheda Esercizi Grafico RettaDocumento1 paginaScheda Esercizi Grafico RettaAndrea GreenNessuna valutazione finora
- Forme e Rette Passanti Per PuntiDocumento5 pagineForme e Rette Passanti Per PuntiCristian GolfariniNessuna valutazione finora
- Autovalori e AutovettoriDocumento5 pagineAutovalori e AutovettoriRoberta TravaglioneNessuna valutazione finora
- 2-Curve e Formule Di FrenètDocumento7 pagine2-Curve e Formule Di FrenètBrunoRizzoNessuna valutazione finora
- Esercizi Su Rette Parallele e PerpendicolariDocumento3 pagineEsercizi Su Rette Parallele e PerpendicolarimatteiotoneNessuna valutazione finora
- Autovalori AutovettoriDocumento2 pagineAutovalori AutovettoripietroNessuna valutazione finora
- Flessione Composta SVDocumento6 pagineFlessione Composta SVJNessuna valutazione finora
- Tensore D'inerziaDocumento13 pagineTensore D'inerziagiuliobomber90Nessuna valutazione finora
- Il Moto Di Una TrottolaDocumento6 pagineIl Moto Di Una Trottolamarco_girardi_3Nessuna valutazione finora
- Lagrangiana Campo EMDocumento6 pagineLagrangiana Campo EMPierfrancesco ButtiNessuna valutazione finora
- Dieta Da Bro 2.0 - Michael SpampinatoDocumento3 pagineDieta Da Bro 2.0 - Michael SpampinatoAlessandro LupoNessuna valutazione finora
- 30 8 10BDocumento12 pagine30 8 10BAlessandro LupoNessuna valutazione finora
- Limiti T PDFDocumento6 pagineLimiti T PDFAlessandro LupoNessuna valutazione finora
- La Matematica Dei Poliedri RegolariDocumento11 pagineLa Matematica Dei Poliedri RegolariAlessandro LupoNessuna valutazione finora
- Analisi Matematica 1 28 Giugno 2010Documento12 pagineAnalisi Matematica 1 28 Giugno 2010Alessandro LupoNessuna valutazione finora
- π 0 −2x 1 2 π 0 −2x 1 2 π 0 −2x π 0 −2x π 0 −2xDocumento8 pagineπ 0 −2x 1 2 π 0 −2x 1 2 π 0 −2x π 0 −2x π 0 −2xAlessandro LupoNessuna valutazione finora
- Analisi IDocumento301 pagineAnalisi IRebecca HayesNessuna valutazione finora
- Esercizi CPDocumento12 pagineEsercizi CPAlessandro LupoNessuna valutazione finora
- 4C 11mar16Documento2 pagine4C 11mar16Alessandro LupoNessuna valutazione finora
- Energia RelativDocumento1 paginaEnergia RelativAlessandro LupoNessuna valutazione finora
- Numeri ComplessiDocumento4 pagineNumeri Complessiamcg19841301Nessuna valutazione finora
- Analisi IDocumento301 pagineAnalisi IRebecca HayesNessuna valutazione finora
- 4C 02mar16Documento2 pagine4C 02mar16Alessandro LupoNessuna valutazione finora
- EserciziDocumento1 paginaEserciziAlessandro LupoNessuna valutazione finora
- Trova La Distanza Tra Le Seguenti Coppie Di PuntiDocumento1 paginaTrova La Distanza Tra Le Seguenti Coppie Di PuntiAlessandro LupoNessuna valutazione finora
- 4C 04mar16Documento3 pagine4C 04mar16Alessandro LupoNessuna valutazione finora
- Esercizi Di Macchine 1Documento3 pagineEsercizi Di Macchine 1Dácil AfonsoNessuna valutazione finora
- As Into TiDocumento1 paginaAs Into TiAlessandro LupoNessuna valutazione finora
- Robotica Dispensa 1Documento23 pagineRobotica Dispensa 1Ramez AymanNessuna valutazione finora
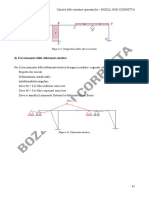
- D) Tracciamento Della Deformata Elastica: Figura 13: Diagramma Dello Sforzo NormaleDocumento28 pagineD) Tracciamento Della Deformata Elastica: Figura 13: Diagramma Dello Sforzo NormaleGiovanniNessuna valutazione finora
- Geometria MusicaDocumento6 pagineGeometria MusicaRobert SchumannNessuna valutazione finora
- Travi A Parete Sottile Centro Di Taglio e Sforzi Tangenziali Centro Di Taglio1Documento14 pagineTravi A Parete Sottile Centro Di Taglio e Sforzi Tangenziali Centro Di Taglio1marcoNessuna valutazione finora
- 12 Operatore InerziaDocumento27 pagine12 Operatore InerziaGianmarcoMiccinilliNessuna valutazione finora
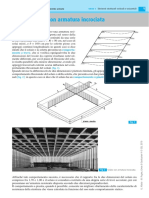
- Solai Solette Armatura Incrociata PDFDocumento10 pagineSolai Solette Armatura Incrociata PDFAleksiey PellicciaNessuna valutazione finora
- 04-Cinematica Corpo RigidoDocumento8 pagine04-Cinematica Corpo RigidoGra MaNessuna valutazione finora
- 2 CristallografiaDocumento34 pagine2 Cristallografiawerwerwer2Nessuna valutazione finora
- I - Recipienti Assialsimmetrici SottiliDocumento27 pagineI - Recipienti Assialsimmetrici SottiliMark HerringNessuna valutazione finora
- Mepvs 2012Documento653 pagineMepvs 2012mxsscrib12Nessuna valutazione finora
- Matematica (Superiori)Documento118 pagineMatematica (Superiori)Francesco MiliternoNessuna valutazione finora
- Manuale Di GeogebraDocumento9 pagineManuale Di GeogebraFrancesco RosatiNessuna valutazione finora
- Rettangolo e RomboDocumento17 pagineRettangolo e RomboredeigoblinwgfNessuna valutazione finora
- Griglia Correzione Invalsi 2010-2011 Matematica Primaria QuintaDocumento22 pagineGriglia Correzione Invalsi 2010-2011 Matematica Primaria QuintaCristina AlberiniNessuna valutazione finora
- Dispense GeometriaDocumento16 pagineDispense GeometriabeniNessuna valutazione finora
- Segnali e Sistemi Parte2Documento234 pagineSegnali e Sistemi Parte2ila9879Nessuna valutazione finora
- Banach PDFDocumento12 pagineBanach PDFIvan TomaNessuna valutazione finora
- Cuaderno Ital 12Documento44 pagineCuaderno Ital 12Ruben Serna CNessuna valutazione finora
- Lo Specchio Di NarcisoDocumento22 pagineLo Specchio Di NarcisoDavide RiboliNessuna valutazione finora
- Cristallografia Mineralogia DidacticDocumento33 pagineCristallografia Mineralogia DidacticVanessa ToniniNessuna valutazione finora
- COME SOPRA COSì SOTTODocumento61 pagineCOME SOPRA COSì SOTTOGabriele ColomboNessuna valutazione finora
- DTI 2017-18 IAS A Lez-04 Convenzioni Di Rappresentazione in PO - Tagli e SezioniDocumento58 pagineDTI 2017-18 IAS A Lez-04 Convenzioni Di Rappresentazione in PO - Tagli e SezionifrancescoleoNessuna valutazione finora
- Struttura Cristallina Dei MaterialiDocumento10 pagineStruttura Cristallina Dei MaterialigabriwarNessuna valutazione finora
- Asimmetrie 11 HRDocumento27 pagineAsimmetrie 11 HRPaolololoNessuna valutazione finora
- 13028-Membrane Di Rivoluzione Con Carichi AssialsimmetriciDocumento6 pagine13028-Membrane Di Rivoluzione Con Carichi AssialsimmetriciGiuseppe FaillaNessuna valutazione finora
- Veronica Gavagna Trasformazioni GeometricheDocumento63 pagineVeronica Gavagna Trasformazioni GeometrichestudentiaristofaneNessuna valutazione finora