Potrebbero piacerti anche
- Motore in Corrente ContinuaDocumento14 pagineMotore in Corrente ContinuaJoker34100% (1)
- Esercizi di fisica: ottica e elettromagnetismoDa EverandEsercizi di fisica: ottica e elettromagnetismoValutazione: 5 su 5 stelle5/5 (1)
- Art 2208 Drive ReelDocumento12 pagineArt 2208 Drive ReelPiero FranciaNessuna valutazione finora
- Azionamenti 5. Motore AsincronoDocumento52 pagineAzionamenti 5. Motore AsincronoOsvaldo SalvatoreNessuna valutazione finora
- Macchina Sincrona 1.1Documento14 pagineMacchina Sincrona 1.1acmm59383Nessuna valutazione finora
- Motore Asincrono TrifaseDocumento8 pagineMotore Asincrono TrifaseGing55 22Nessuna valutazione finora
- Macchine Elettriche 4Documento15 pagineMacchine Elettriche 4Anonymous f3iGLjxNessuna valutazione finora
- Macchine SincroneDocumento53 pagineMacchine SincronerbencicNessuna valutazione finora
- Motore Sincrono e AsincronoDocumento3 pagineMotore Sincrono e Asincronofpiccoli_4Nessuna valutazione finora
- Motore ElettricoDocumento3 pagineMotore ElettricofukinagashiNessuna valutazione finora
- Macchine Elettriche Rotanti PDFDocumento4 pagineMacchine Elettriche Rotanti PDFAndrea De angelisNessuna valutazione finora
- 21 Motore Passo Passo 210504Documento18 pagine21 Motore Passo Passo 210504giuseppe baldassarreNessuna valutazione finora
- Step MotoriDocumento12 pagineStep MotoriZoran AleksicNessuna valutazione finora
- Motore Passo Passo Con Driver L298NDocumento21 pagineMotore Passo Passo Con Driver L298Ngiuseppe baldassarreNessuna valutazione finora
- Motori Elettrici e Circuiti Di PilotaggioDocumento37 pagineMotori Elettrici e Circuiti Di PilotaggioMarcolinoNessuna valutazione finora
- Motori Corrente AlternataDocumento4 pagineMotori Corrente AlternataFrancesco TozzettiNessuna valutazione finora
- Fisica EsameDocumento21 pagineFisica EsameGiovanni TinoNessuna valutazione finora
- Motori Sincroni BrushlessDocumento24 pagineMotori Sincroni BrushlessLeonida GrandiNessuna valutazione finora
- Le Valvole ProporzionaliDocumento18 pagineLe Valvole ProporzionaliSalvatore MontaninoNessuna valutazione finora
- L'Induzione Elettromagnetica in Sintesi - Pizzardini AntoniaDocumento7 pagineL'Induzione Elettromagnetica in Sintesi - Pizzardini Antoniaantonia_maddalenaNessuna valutazione finora
- Motore A Correnteccc - Prima ParteDocumento13 pagineMotore A Correnteccc - Prima ParteCarmine Di VilioNessuna valutazione finora
- Step MotorsDocumento20 pagineStep MotorsClaudiomeneNessuna valutazione finora
- Macchine Elettriche - Galilei, MirandolaDocumento280 pagineMacchine Elettriche - Galilei, Mirandolarewq999Nessuna valutazione finora
- Elettrotecnica e Macchine ElettricheDocumento96 pagineElettrotecnica e Macchine ElettricheIgor BruniNessuna valutazione finora
- Induzione ElettromagneticaDocumento2 pagineInduzione Elettromagneticasara non lo soNessuna valutazione finora
- Motore in Corrente ContinuaDocumento6 pagineMotore in Corrente ContinuagbnNessuna valutazione finora
- Motore A CCDocumento54 pagineMotore A CCErnestoMissoNessuna valutazione finora
- 03 Macchine Elettriche Rotanti GeneralitàDocumento22 pagine03 Macchine Elettriche Rotanti Generalitàalepiemo13Nessuna valutazione finora
- Induzione Elettromagnetica - Pizzardini AntoniaDocumento10 pagineInduzione Elettromagnetica - Pizzardini Antoniaantonia_maddalenaNessuna valutazione finora
- La Risonanza Magnetica SlideDocumento111 pagineLa Risonanza Magnetica SlideandreaNessuna valutazione finora
- Appunti AttuatoriDocumento14 pagineAppunti AttuatoriGianni SavesiNessuna valutazione finora
- Altra Scienza - Rivista Free Energy N 27 - Nikola Tesla PDFDocumento172 pagineAltra Scienza - Rivista Free Energy N 27 - Nikola Tesla PDFcorrynt100% (1)
- StepmotorDocumento9 pagineStepmotorGIOVANNI MIGLIETTANessuna valutazione finora
- Motori Asincroni e SincroniDocumento4 pagineMotori Asincroni e SincroniGinoNessuna valutazione finora
- Motore Magnetic Od I ValerioDocumento19 pagineMotore Magnetic Od I ValeriocorryntNessuna valutazione finora
- Gli Avviamenti Dei Motori Asincroni TrifaseDocumento5 pagineGli Avviamenti Dei Motori Asincroni Trifasecarlo paneraiNessuna valutazione finora
- 0 Alternator eDocumento4 pagine0 Alternator eiziofioritoNessuna valutazione finora
- Forza Centripeta e GravitazioneDocumento25 pagineForza Centripeta e GravitazionedodecarioNessuna valutazione finora
- Trasduttori Per La Rilevazione Di Velocità e PosizioneDocumento16 pagineTrasduttori Per La Rilevazione Di Velocità e PosizioneManotti AndreaNessuna valutazione finora
- Macchine SincroneDocumento28 pagineMacchine SincroneGianfrancesco FlorioNessuna valutazione finora
- Induzione ElettomagneticaDocumento10 pagineInduzione ElettomagneticamartaNessuna valutazione finora
- Alternatore TrifaseDocumento4 pagineAlternatore TrifaseiziofioritoNessuna valutazione finora
- 9na EXPERIENCIA (GUIA) ELECTROMAGNETISMODocumento9 pagine9na EXPERIENCIA (GUIA) ELECTROMAGNETISMOHUMBERTO APACLLA LOAYZANessuna valutazione finora
- MOTORI SINCRONI e MOTORI ASINCRONIDocumento2 pagineMOTORI SINCRONI e MOTORI ASINCRONIMAUNessuna valutazione finora
- Controllo Wireless Di Motori StepperDocumento59 pagineControllo Wireless Di Motori StepperPECAFENessuna valutazione finora
- Tesi 3 AnnoDocumento70 pagineTesi 3 AnnoJohn Earl TejamoNessuna valutazione finora
- Bussola Magnetica E GirobussolaDocumento31 pagineBussola Magnetica E GirobussoladfdsdfsdNessuna valutazione finora
- THESIS Niyaz YusifovDocumento25 pagineTHESIS Niyaz YusifovAruna MadhuchinthakaNessuna valutazione finora
- Il Motore ElettricoDocumento8 pagineIl Motore ElettricoFilippo PalmieriNessuna valutazione finora
- Le Leggi Di OhmDocumento10 pagineLe Leggi Di OhmClarissa SampinoNessuna valutazione finora
- Alternatore - Tecnologia (Capitani)Documento21 pagineAlternatore - Tecnologia (Capitani)VeraniJNessuna valutazione finora
- Ponte TrifaseDocumento7 paginePonte TrifaseFortunatoD'AcunzoNessuna valutazione finora
- 2.1motore Sincrono A Magneti PermanentiDocumento23 pagine2.1motore Sincrono A Magneti PermanentiFedericaNessuna valutazione finora
- Il MagnetismoDocumento3 pagineIl MagnetismosvevaNessuna valutazione finora
- Adams IDocumento28 pagineAdams Icobra10Nessuna valutazione finora
- Azionamenti ImDocumento38 pagineAzionamenti Imalfierebastardo100% (1)
- Macchine ElettricheDocumento4 pagineMacchine Elettricheantoniooronzo.delsoleNessuna valutazione finora
- MEGMENGHINIDocumento22 pagineMEGMENGHINIJohn Miller100% (1)
- Free Energy Trasformatori InfoDocumento218 pagineFree Energy Trasformatori InfoDomenico RoselliNessuna valutazione finora
- Meccanica Applicata Alle Macchine PDFDocumento188 pagineMeccanica Applicata Alle Macchine PDFLoredana Magda100% (1)
- Meccanica Applicata EsercitazioniDocumento114 pagineMeccanica Applicata EsercitazioniErnestoMisso100% (1)
- 2AAMECAGRVOLIICORRETTOULTDocumento258 pagine2AAMECAGRVOLIICORRETTOULTgiuseppe baldassarreNessuna valutazione finora
- PI 2018 004 Quaderni Di Progettazione Cinghie 1Documento5 paginePI 2018 004 Quaderni Di Progettazione Cinghie 1giuseppe baldassarreNessuna valutazione finora
- Cap. 1 - MeccanismiDocumento36 pagineCap. 1 - Meccanismigiuseppe baldassarreNessuna valutazione finora
- PI_2021_010_INT066-069Documento5 paginePI_2021_010_INT066-069giuseppe baldassarreNessuna valutazione finora
- SKF Elementi Meccanica Delle TrasmissionoDocumento72 pagineSKF Elementi Meccanica Delle TrasmissionoDaniele PardiniNessuna valutazione finora
- Esercizi Di Meccanica Dei FluidiDocumento24 pagineEsercizi Di Meccanica Dei FluidikiaraNessuna valutazione finora
- PI_2019_008_INT057-061Documento6 paginePI_2019_008_INT057-061giuseppe baldassarreNessuna valutazione finora
- 20171211_appunti_mrmDocumento187 pagine20171211_appunti_mrmgiuseppe baldassarreNessuna valutazione finora
- PI_2018_004_INT056-059Documento5 paginePI_2018_004_INT056-059giuseppe baldassarreNessuna valutazione finora
- Motore Passo Passo Con Driver L298NDocumento21 pagineMotore Passo Passo Con Driver L298Ngiuseppe baldassarreNessuna valutazione finora
- PI_2018_009_INT050-054Documento5 paginePI_2018_009_INT050-054giuseppe baldassarreNessuna valutazione finora
- PI_2020_002_INT048-050Documento4 paginePI_2020_002_INT048-050giuseppe baldassarreNessuna valutazione finora
- PI_2021_007_INT053-060Documento9 paginePI_2021_007_INT053-060giuseppe baldassarreNessuna valutazione finora
- PI_2017_004_INT052-0551091Documento5 paginePI_2017_004_INT052-0551091giuseppe baldassarreNessuna valutazione finora
- PI_2021_010_INT066-069Documento5 paginePI_2021_010_INT066-069giuseppe baldassarreNessuna valutazione finora
- Misure Elettriche - Insegnamento Di Misure Elettroniche Sensori e TrasduttoriDocumento182 pagineMisure Elettriche - Insegnamento Di Misure Elettroniche Sensori e Trasduttoridannyprince84Nessuna valutazione finora
- PI_2017_001_INT040-0441096Documento6 paginePI_2017_001_INT040-0441096giuseppe baldassarreNessuna valutazione finora
- PI_2021_002_INT046-051Documento8 paginePI_2021_002_INT046-051giuseppe baldassarreNessuna valutazione finora
- CRITERI DI SCELTA DEL PLC VARI TIPI DI LINGUAGGI ... - Vfioraso - ItDocumento3 pagineCRITERI DI SCELTA DEL PLC VARI TIPI DI LINGUAGGI ... - Vfioraso - Itgiuseppe baldassarreNessuna valutazione finora
- Sensori Di Prossimità Ad Ultrasuoni Sonar-BERO 3RG6 - SiemensDocumento26 pagineSensori Di Prossimità Ad Ultrasuoni Sonar-BERO 3RG6 - Siemensgiuseppe baldassarreNessuna valutazione finora
- Pi 2020 005 Int050-052Documento4 paginePi 2020 005 Int050-052giuNessuna valutazione finora
- PI_2017_003_INT050-0541092Documento6 paginePI_2017_003_INT050-0541092giuseppe baldassarreNessuna valutazione finora
- Corso PLC Programmazione DA INVIAREDocumento21 pagineCorso PLC Programmazione DA INVIAREStefano SintoniNessuna valutazione finora
- Dispensa Introduttiva Sui PLC-Utile Per La Sezione GuastiDocumento31 pagineDispensa Introduttiva Sui PLC-Utile Per La Sezione Guastiglicinedelcosmo22100% (1)
- SISTEMI DINAMICI MECCANICI, Franco CardinDocumento229 pagineSISTEMI DINAMICI MECCANICI, Franco CardinSebastiano BraviNessuna valutazione finora
- 2AAMECAGRVOLIICORRETTOULTDocumento258 pagine2AAMECAGRVOLIICORRETTOULTgiuseppe baldassarreNessuna valutazione finora
- Frazioni ContinueDocumento46 pagineFrazioni Continuegexaboy208Nessuna valutazione finora
- 08 CuscinettiDocumento39 pagine08 CuscinettiMiluu86Nessuna valutazione finora
- 02-Micromeccanica e Macromeccanica OkDocumento112 pagine02-Micromeccanica e Macromeccanica OkDomenicoBalzanoNessuna valutazione finora
- ART Di Yasmine RezaDocumento59 pagineART Di Yasmine RezaAntonello MigliaccioNessuna valutazione finora
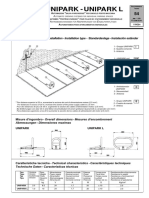
- Came Notice UniparkDocumento4 pagineCame Notice UniparkmourisseNessuna valutazione finora
- Frasi Importanti Allan Kardec - Cielo e InfernoDocumento4 pagineFrasi Importanti Allan Kardec - Cielo e InfernofuffoliNessuna valutazione finora
- Catalogo HITACHIDocumento48 pagineCatalogo HITACHISoineth GuzmánNessuna valutazione finora
- SaldatureDocumento14 pagineSaldaturemalliokognNessuna valutazione finora
- LEZ 20 Liofilizzazione Modalita CompatibilitaDocumento16 pagineLEZ 20 Liofilizzazione Modalita Compatibilitarodrigue yanNessuna valutazione finora
- 未来のキミとすべての歌に BGM 9 PDFDocumento1 pagina未来のキミとすべての歌に BGM 9 PDFJohnNessuna valutazione finora
- Accumulatori per impianti ad energia rinnovabileDa EverandAccumulatori per impianti ad energia rinnovabileValutazione: 2 su 5 stelle2/5 (1)
- Elettrotecnica Generale: Circuiti Elettrici in Regime StazionarioDa EverandElettrotecnica Generale: Circuiti Elettrici in Regime StazionarioNessuna valutazione finora
- Impianto elettrico di base: Salvavita - Quadro elettrico - Tester - Guaine murate - Canaline esterne - Impianto elettricoDa EverandImpianto elettrico di base: Salvavita - Quadro elettrico - Tester - Guaine murate - Canaline esterne - Impianto elettricoNessuna valutazione finora
- Concorso Regione Campania - i Test RIPAM Informatica: Quesiti a risposta multipla di informatica tratti dalla banca dati del RIPAMDa EverandConcorso Regione Campania - i Test RIPAM Informatica: Quesiti a risposta multipla di informatica tratti dalla banca dati del RIPAMNessuna valutazione finora
- Impianti elettrici in esterno: Campanello - Citofono - Terra - Luci per giardino e laghetti - Pannello fotovoltaico - ParafulminiDa EverandImpianti elettrici in esterno: Campanello - Citofono - Terra - Luci per giardino e laghetti - Pannello fotovoltaico - ParafulminiNessuna valutazione finora
- Esercizi di matematica: equazioni differenziali a derivate parzialiDa EverandEsercizi di matematica: equazioni differenziali a derivate parzialiValutazione: 5 su 5 stelle5/5 (1)
- Punti luce e Illuminazione: LED - Alogene - Luci fluorescenti - Faretti - Variatori - InstallazioniDa EverandPunti luce e Illuminazione: LED - Alogene - Luci fluorescenti - Faretti - Variatori - InstallazioniNessuna valutazione finora
- Effetto della quantità di carica sulle proprietà strutturali e sulla stabilità di quadrieliche di guanosine: analisi mediante diffrazione dei raggi XDa EverandEffetto della quantità di carica sulle proprietà strutturali e sulla stabilità di quadrieliche di guanosine: analisi mediante diffrazione dei raggi XNessuna valutazione finora
- Circuiti di accensione: Interruttori - Deviatori - Invertitori - Relè - Faretti - Luce scale - LampadariDa EverandCircuiti di accensione: Interruttori - Deviatori - Invertitori - Relè - Faretti - Luce scale - LampadariNessuna valutazione finora
- Modello semplificato di arco nudo ricurvo - Analisi statica e dinamica - Parte primaDa EverandModello semplificato di arco nudo ricurvo - Analisi statica e dinamica - Parte primaNessuna valutazione finora