Potrebbero piacerti anche
- Pendolo A TorsioneDocumento10 paginePendolo A TorsioneAnna MoriNessuna valutazione finora
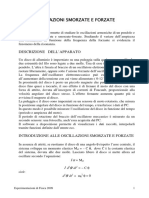
- Relazione Laboratorio 1 Su Oscillazioni Libere Smorzate e Forzate - UnimibDocumento11 pagineRelazione Laboratorio 1 Su Oscillazioni Libere Smorzate e Forzate - UnimibguzmanNessuna valutazione finora
- Relazione III Lab Meccanica - Gruppo A1Documento9 pagineRelazione III Lab Meccanica - Gruppo A1Federico AnneseNessuna valutazione finora
- Esp Fi Sforza TeDocumento5 pagineEsp Fi Sforza TeDavide ArangioNessuna valutazione finora
- PendoloDocumento9 paginePendoloPippoNessuna valutazione finora
- Oscillazioni TorsionaliDocumento7 pagineOscillazioni TorsionaliFabio PelleritoNessuna valutazione finora
- 2012 Esame 18 Giugno Testo SoluzioniDocumento3 pagine2012 Esame 18 Giugno Testo Soluzionisimone28804Nessuna valutazione finora
- Il Moto Turbolento - Capitolo 9Documento28 pagineIl Moto Turbolento - Capitolo 9Vincenzo PicozziNessuna valutazione finora
- Lez 5Documento24 pagineLez 5Carlotta Lucchese100% (1)
- Elaborato Matematica e Fisica MaturitàDocumento5 pagineElaborato Matematica e Fisica MaturitàMarzia ForastieroNessuna valutazione finora
- Pendolo SempliceDocumento4 paginePendolo Semplicepesado95Nessuna valutazione finora
- C1 Lucidi Esperienza Molle 2014Documento39 pagineC1 Lucidi Esperienza Molle 2014Paola CattozzoNessuna valutazione finora
- Applicazioni Della Derivata in FisicaDocumento6 pagineApplicazioni Della Derivata in FisicaLaura PecoraroNessuna valutazione finora
- Esercizi Svolti Di Meccanica - Liceofermicanosa.itDocumento16 pagineEsercizi Svolti Di Meccanica - Liceofermicanosa.itgiuseppe baldassarreNessuna valutazione finora
- VolanoDocumento8 pagineVolanoFederico AnneseNessuna valutazione finora
- Es10 21 05 19Documento3 pagineEs10 21 05 19Lorenzo Campanella0% (1)
- Bipoli ImpulsiviDocumento44 pagineBipoli ImpulsiviAlfio AlfiniNessuna valutazione finora
- Meccanica Lagrangiana RelativisticaDocumento37 pagineMeccanica Lagrangiana RelativisticaGunnar DentNessuna valutazione finora
- Colp ArieteDocumento40 pagineColp ArieteFolpoNessuna valutazione finora
- Fisica GeneraleDocumento43 pagineFisica GeneraleFrankyDonnarummaNessuna valutazione finora
- Soluzioni Terza Prova Scritta 2016 Di Fisica Generale I Per Ingegneria Chimica e GestionaleDocumento6 pagineSoluzioni Terza Prova Scritta 2016 Di Fisica Generale I Per Ingegneria Chimica e GestionaleLuca BaldanziNessuna valutazione finora
- 2007 05 04 Prova Itinere Meccanica Testo SoluzioniDocumento7 pagine2007 05 04 Prova Itinere Meccanica Testo Soluzionigesu.promettimiNessuna valutazione finora
- Elaborazione Numerica Dei SegnaliDocumento29 pagineElaborazione Numerica Dei Segnalidomenico pioNessuna valutazione finora
- Ipotesi ErgodicaDocumento25 pagineIpotesi ErgodicaMatteo ScandiNessuna valutazione finora
- DINAMICA ROTAZIONALE - Eserciziario Semplice Con SoluzioniDocumento13 pagineDINAMICA ROTAZIONALE - Eserciziario Semplice Con Soluzionirocco.mantovaniNessuna valutazione finora
- Vibrazioni - Versione StampaDocumento62 pagineVibrazioni - Versione Stampaperty92Nessuna valutazione finora
- Nuovo Documento Di Microsoft WordDocumento9 pagineNuovo Documento Di Microsoft WordcNessuna valutazione finora
- Oscillatore 1Documento11 pagineOscillatore 1dariaNessuna valutazione finora
- CINEMATICA Del Punto MaterialeDocumento7 pagineCINEMATICA Del Punto MaterialeGabriele De LucaNessuna valutazione finora
- Soluzioni Commentate Gruppo 5Documento3 pagineSoluzioni Commentate Gruppo 5Danilo BoschiNessuna valutazione finora
- RelazionemassamollaDocumento15 pagineRelazionemassamollaPACCAGNELLA ALESSANDRONessuna valutazione finora
- Appello - 2019 09 11 - SOLUZIONI 2Documento8 pagineAppello - 2019 09 11 - SOLUZIONI 2FabioNessuna valutazione finora
- Reattori IdealiDocumento31 pagineReattori IdealiGaetano ContinilloNessuna valutazione finora
- Analisi ModaleDocumento10 pagineAnalisi ModaleJoker34Nessuna valutazione finora
- Oscillazioni Smorzate e ForzateDocumento4 pagineOscillazioni Smorzate e Forzatebgiangre8372Nessuna valutazione finora
- 2013 Esame - 07 - Febbraio - Testo e SoluzioniDocumento3 pagine2013 Esame - 07 - Febbraio - Testo e Soluzionisimone28804Nessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Matt Compierchio100% (1)
- Esercizi RazzoDocumento11 pagineEsercizi Razzofluffa23Nessuna valutazione finora
- Esercizi TRDocumento8 pagineEsercizi TRGiuseppe CaliendoNessuna valutazione finora
- Risposta ForzataDocumento42 pagineRisposta ForzataAntonio GargiuloNessuna valutazione finora
- Circuit LRCDocumento7 pagineCircuit LRCFrandam94Nessuna valutazione finora
- 2018 Esame 4 Settembre Testo e SoluzioniDocumento2 pagine2018 Esame 4 Settembre Testo e Soluzionisimone28804Nessuna valutazione finora
- Formulario AstroDocumento14 pagineFormulario AstroEmanuele RoccoNessuna valutazione finora
- Esercizi Corpo RigidoDocumento4 pagineEsercizi Corpo Rigidoguiguislo200336Nessuna valutazione finora
- Scritti FarmaciaDocumento198 pagineScritti FarmaciaSaturas92Nessuna valutazione finora
- Esercizi Di Fisica Dello Stato SolidoDocumento45 pagineEsercizi Di Fisica Dello Stato Solidociccioner100% (2)
- Esercizi AstrofisicaDocumento25 pagineEsercizi AstrofisicaPinoNanoBluesNessuna valutazione finora
- SG 2019 - Prova e Soluzioni FisicaDocumento10 pagineSG 2019 - Prova e Soluzioni FisicaSabrina CeppiNessuna valutazione finora
- Rel IV F.Annese PPIDocumento9 pagineRel IV F.Annese PPIFederico AnneseNessuna valutazione finora
- Esercitazioni Exercises THM (Thermal and Hydraulic Machines)Documento105 pagineEsercitazioni Exercises THM (Thermal and Hydraulic Machines)slobo187100% (3)
- Formulario Di Fisica PDFDocumento19 pagineFormulario Di Fisica PDFSalvo LaudaniNessuna valutazione finora
- Lezione 23Documento11 pagineLezione 23Basette BasetteNessuna valutazione finora
- CPM6-Mecc 2435650Documento27 pagineCPM6-Mecc 2435650albertoterrNessuna valutazione finora
- Teoria Classica Di LorentzDocumento13 pagineTeoria Classica Di LorentzFabio GraziosoNessuna valutazione finora
- Fluidodinamica - moto dei fluidi intorno ai corpiDocumento11 pagineFluidodinamica - moto dei fluidi intorno ai corpiAndrea OblatoreNessuna valutazione finora
- Esercitazione 3-4Documento10 pagineEsercitazione 3-4chiaraNessuna valutazione finora
- Appello Mam SvoltoDocumento5 pagineAppello Mam Svoltomattia De CiccoNessuna valutazione finora
- Funzione Di TrasferimentoDocumento20 pagineFunzione Di TrasferimentoLeonardo MollicaNessuna valutazione finora
- Burney - A - General - History - of - Music PDFDocumento673 pagineBurney - A - General - History - of - Music PDFChopin97Nessuna valutazione finora
- Linguaggi Di Programmazione C e C++Documento4 pagineLinguaggi Di Programmazione C e C++Fake CNessuna valutazione finora
- Tutorial Sulla Configurazione Di Un Cluster in Modalità Domain Con JBOSS EAP 6Documento30 pagineTutorial Sulla Configurazione Di Un Cluster in Modalità Domain Con JBOSS EAP 6richardgennaroNessuna valutazione finora
- Analisi TransazionaleDocumento4 pagineAnalisi TransazionaleTeresa LuzzuNessuna valutazione finora
- 1974 Maladie Et La MortDocumento470 pagine1974 Maladie Et La MortLupuNessuna valutazione finora
- Programmazione IEC 61131-3 (LogicLab)Documento314 pagineProgrammazione IEC 61131-3 (LogicLab)Roberto BiasciNessuna valutazione finora
- Figure Femminili Nei Pharsalia (Medea)Documento325 pagineFigure Femminili Nei Pharsalia (Medea)Rita Anna SabinoNessuna valutazione finora
- Futuro AnterioreDocumento15 pagineFuturo AnterioreelenigeorgiadouNessuna valutazione finora
- Come Funziona RocketDockDocumento15 pagineCome Funziona RocketDockapi-19822895Nessuna valutazione finora
- Latour - Pequeña Filosofía de La Enunciación ItalianoDocumento28 pagineLatour - Pequeña Filosofía de La Enunciación ItalianoRodrigo GonzalezNessuna valutazione finora
- Storia e Cultura Russa Dalla Rus' Di Kiev Alla Russia Post-SovieticaDocumento110 pagineStoria e Cultura Russa Dalla Rus' Di Kiev Alla Russia Post-SovieticaCristina AndreeaNessuna valutazione finora
- Reti e Sistemi InformativiDocumento16 pagineReti e Sistemi InformativiLuigi SambucoNessuna valutazione finora
- Testimonianza Degli Evangelisti - Simon Greenleaf (1783-1853)Documento23 pagineTestimonianza Degli Evangelisti - Simon Greenleaf (1783-1853)Valerio BaroneNessuna valutazione finora