Potrebbero piacerti anche
- Relazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreDocumento38 pagineRelazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreFabio MoramarcoNessuna valutazione finora
- 16 Macchine AsincroneDocumento23 pagine16 Macchine AsincronemikeNessuna valutazione finora
- Esp Fi Sforza TeDocumento5 pagineEsp Fi Sforza TeDavide ArangioNessuna valutazione finora
- Esercizi TrasmissioniDocumento14 pagineEsercizi TrasmissioniFrancesco CangioliNessuna valutazione finora
- Esercizi Svolti Analisi Carichi PDFDocumento8 pagineEsercizi Svolti Analisi Carichi PDFHernan MarianiNessuna valutazione finora
- Trasformatore 1.1Documento28 pagineTrasformatore 1.1acmm59383Nessuna valutazione finora
- Esame Stato Meccanica 2003Documento5 pagineEsame Stato Meccanica 2003st_luiseNessuna valutazione finora
- DINAMICA ROTAZIONALE - Eserciziario Semplice Con SoluzioniDocumento13 pagineDINAMICA ROTAZIONALE - Eserciziario Semplice Con Soluzionirocco.mantovaniNessuna valutazione finora
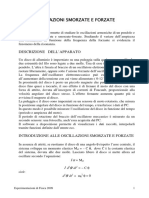
- Oscillazioni Smorzate e ForzateDocumento4 pagineOscillazioni Smorzate e Forzatebgiangre8372Nessuna valutazione finora
- Esercizi Circuiti MagneticiDocumento29 pagineEsercizi Circuiti MagneticiHernan MarianiNessuna valutazione finora
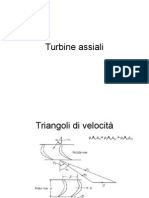
- 4 - Turbine AssialiDocumento37 pagine4 - Turbine AssialiStefano Camillucci0% (1)
- Meccanica Approfondimenti Piero PierottiDocumento17 pagineMeccanica Approfondimenti Piero PierottiRoby MastreNessuna valutazione finora
- Regolazione Velocita Motore AsincronoDocumento9 pagineRegolazione Velocita Motore Asincronodimay36641Nessuna valutazione finora
- A2 Il Motore Asincrono Trifase 2010Documento8 pagineA2 Il Motore Asincrono Trifase 2010Ortensia Del LagoNessuna valutazione finora
- Pendolo A TorsioneDocumento10 paginePendolo A TorsioneAnna MoriNessuna valutazione finora
- Auto Tras Format or IDocumento4 pagineAuto Tras Format or IRebel PalestreNessuna valutazione finora
- Eser3 1Documento6 pagineEser3 1Lkh dmtNessuna valutazione finora
- Isolamento Controllo VibrazioniDocumento26 pagineIsolamento Controllo Vibrazionikingofchaos87Nessuna valutazione finora
- Esercizi CinghieDocumento3 pagineEsercizi CinghieValerio Jackson MelucciNessuna valutazione finora
- Pendolo A TorsioneDocumento4 paginePendolo A TorsioneAnna MoriNessuna valutazione finora
- Oscillazioni TorsionaliDocumento7 pagineOscillazioni TorsionaliFabio PelleritoNessuna valutazione finora
- Unione Bullonata A Taglio-Torsione e FlessioneDocumento7 pagineUnione Bullonata A Taglio-Torsione e FlessioneLinda Di FrancoNessuna valutazione finora
- 46030541esercitazione8 1Documento4 pagine46030541esercitazione8 1ManuelLentiNessuna valutazione finora
- Collezione Compiti D'esame Fisica 1 - 1Documento37 pagineCollezione Compiti D'esame Fisica 1 - 1Andrea SpitaleNessuna valutazione finora
- Costruzioni 18 SincronoDocumento37 pagineCostruzioni 18 SincronoGiuseppe FerrariNessuna valutazione finora
- 1° ProblemaDocumento2 pagine1° ProblemaDomenico TaglienteNessuna valutazione finora
- Esercizi Circuiti MagneticiDocumento29 pagineEsercizi Circuiti Magneticigogo469Nessuna valutazione finora
- Costruzione Macchine Vol1Documento177 pagineCostruzione Macchine Vol1silvano andornoNessuna valutazione finora
- Esercizi Stud Con RisultatiDocumento15 pagineEsercizi Stud Con RisultatiMario TodiscoNessuna valutazione finora
- Esercizi Svolti Analisi CarichiDocumento8 pagineEsercizi Svolti Analisi CarichiDonato PaglionicoNessuna valutazione finora
- Instabilità Torsionale e Flesso-Torsionale (Svergolamento)Documento21 pagineInstabilità Torsionale e Flesso-Torsionale (Svergolamento)gigingNessuna valutazione finora
- Prova 2010elettrotecnicaDocumento5 pagineProva 2010elettrotecnicaantonio nigliaNessuna valutazione finora
- Costruzioni 6 TrasformatoriDocumento24 pagineCostruzioni 6 TrasformatoribrutusNessuna valutazione finora
- Verifiche Di InstabilitàDocumento21 pagineVerifiche Di InstabilitàroferrNessuna valutazione finora
- Dispense EserciziDocumento90 pagineDispense Eserciziwavoma6540Nessuna valutazione finora
- Esercizi Stud Con Risultati PDFDocumento15 pagineEsercizi Stud Con Risultati PDFValerio Jackson MelucciNessuna valutazione finora
- Azionamenti 5. Motore AsincronoDocumento52 pagineAzionamenti 5. Motore AsincronoOsvaldo SalvatoreNessuna valutazione finora
- Ana2013 Der SolDocumento6 pagineAna2013 Der SolOsama BafiliNessuna valutazione finora
- Pilastri Instabilità Colonna Modello PDFDocumento22 paginePilastri Instabilità Colonna Modello PDFAleksiey PellicciaNessuna valutazione finora
- La Trasmissione NegliazionamentiDocumento3 pagineLa Trasmissione NegliazionamentiGIOVANNI MIGLIETTANessuna valutazione finora
- Esercizi Vibrazioni Libere e Vibrazioni ForzateDocumento5 pagineEsercizi Vibrazioni Libere e Vibrazioni ForzateValerio Jackson MelucciNessuna valutazione finora
- Esercizi ElettrotecnicaDocumento28 pagineEsercizi ElettrotecnicaTizio Caio SempronioNessuna valutazione finora
- Relazione Di CalcoloDocumento26 pagineRelazione Di CalcoloFloriano SalviNessuna valutazione finora
- Soluzione Scritto Fis A27 Gennaio 2022Documento4 pagineSoluzione Scritto Fis A27 Gennaio 2022andreaNessuna valutazione finora
- Appello 2011-07-22 IDocumento3 pagineAppello 2011-07-22 IEugenio SpagnoloNessuna valutazione finora
- Appello - 2019 09 11 - SOLUZIONI 2Documento8 pagineAppello - 2019 09 11 - SOLUZIONI 2FabioNessuna valutazione finora
- Problemi 2 (Con Soluzioni)Documento6 pagineProblemi 2 (Con Soluzioni)alevic352Nessuna valutazione finora
- Nastro Trasportatore in Ambiente Sterile InclinatoDocumento9 pagineNastro Trasportatore in Ambiente Sterile InclinatoNunzia D'EliaNessuna valutazione finora
- Dispense Costruzione Di Macchine Vol.1 - AndornoDocumento211 pagineDispense Costruzione Di Macchine Vol.1 - AndornoPierluigi RomanoNessuna valutazione finora
- Esami FisicaDocumento169 pagineEsami FisicaPietro CamponeschiNessuna valutazione finora
- Appello MAM 190717Documento2 pagineAppello MAM 19071752rstrumboNessuna valutazione finora
- Esercizi MeccAppDocumento51 pagineEsercizi MeccAppPaoloMaccaronioNessuna valutazione finora
- Moto Di Cariche ElettricheDocumento22 pagineMoto Di Cariche ElettricheMarcello PellacaniNessuna valutazione finora
- Costruzioni Di AcciaioDocumento28 pagineCostruzioni Di AcciaioMario MereniNessuna valutazione finora
- Esercizi di fisica: fisica nucleare e fisica della materiaDa EverandEsercizi di fisica: fisica nucleare e fisica della materiaNessuna valutazione finora
- Relazione ArchimedeDocumento3 pagineRelazione ArchimedeFabio Nisci50% (2)
- FisicaDocumento7 pagineFisicaTommaso CataliniNessuna valutazione finora
- La Misura Di Portata Per VaporeDocumento12 pagineLa Misura Di Portata Per Vaporecarlo_8989Nessuna valutazione finora
- Ciclo Di LavorazioneDocumento54 pagineCiclo Di LavorazionePasquale EspositoNessuna valutazione finora
- Esercizio Iperstatiche TorsionaliDocumento6 pagineEsercizio Iperstatiche Torsionalirevenge987Nessuna valutazione finora
- Avanti 2016Documento54 pagineAvanti 2016vicente cardonaNessuna valutazione finora
- Manuale IdraulicaDocumento29 pagineManuale IdraulicaankasbilenkaNessuna valutazione finora
- 12 - ScalpelliDocumento14 pagine12 - ScalpelliROBERSON ROMERÒNessuna valutazione finora
- Manitou MRT Privilege Plus (IT)Documento28 pagineManitou MRT Privilege Plus (IT)ManitouNessuna valutazione finora
- 3 - Veicoli e Trasmissioni 13Documento15 pagine3 - Veicoli e Trasmissioni 13mattia2di2chiaraNessuna valutazione finora
- CedimentiDocumento55 pagineCedimentiPro' GiosueleNessuna valutazione finora