Potrebbero piacerti anche
- Cap02 Esercizi 3649Documento15 pagineCap02 Esercizi 3649andrez85Nessuna valutazione finora
- 6.0 Geometria SterzoDocumento9 pagine6.0 Geometria SterzoGiacomoDiPrimaNessuna valutazione finora
- Relazione Di Laboratorio Sul Piano InclinatoDocumento21 pagineRelazione Di Laboratorio Sul Piano Inclinatomipiacemrgoldstein0% (1)
- Veicolo RidottoDocumento8 pagineVeicolo RidottobenedettaNessuna valutazione finora
- AvancorsaDocumento4 pagineAvancorsaFrancesco PiniNessuna valutazione finora
- Compiti Delle Vacanze Di Fisica PDFDocumento3 pagineCompiti Delle Vacanze Di Fisica PDFPaolo BartesaghiNessuna valutazione finora
- Moti Nel PianoDocumento13 pagineMoti Nel PianomngrpdzhmtNessuna valutazione finora
- 1° ProblemaDocumento2 pagine1° ProblemaDomenico TaglienteNessuna valutazione finora
- Tutorato 7 - Corpi RigidiDocumento5 pagineTutorato 7 - Corpi RigidigiuseppeNessuna valutazione finora
- Single TrackDocumento31 pagineSingle TrackGabriele FicheraNessuna valutazione finora
- Bibbia Della DinamicaDocumento7 pagineBibbia Della DinamicaGiovanni SecondoNessuna valutazione finora
- FisicaDocumento1 paginaFisicaMarta Malik0% (1)
- Azionamenti 5. Motore AsincronoDocumento52 pagineAzionamenti 5. Motore AsincronoOsvaldo SalvatoreNessuna valutazione finora
- Esercizi di fisica per licei: cinematica, dinamica e staticaDa EverandEsercizi di fisica per licei: cinematica, dinamica e staticaNessuna valutazione finora
- Motore Passo PassoDocumento6 pagineMotore Passo PassoGiuseppePeppinoPaciulliNessuna valutazione finora
- Cap01 Esercizi 3649Documento10 pagineCap01 Esercizi 3649MicheleZottiNessuna valutazione finora
- LEZIONE 2 - Slab BridgesDocumento7 pagineLEZIONE 2 - Slab BridgesLuca Dal MolinNessuna valutazione finora
- Tracciato PlanimetricoDocumento7 pagineTracciato PlanimetricoHugo CausseNessuna valutazione finora
- Meccanica Applicata Alle MacchineDocumento36 pagineMeccanica Applicata Alle MacchinedaniloNessuna valutazione finora
- Trasmissioni Di Potenza e Ruote DentateDocumento20 pagineTrasmissioni Di Potenza e Ruote DentateStefano Holly PizzoNessuna valutazione finora
- Motori Corrente AlternataDocumento4 pagineMotori Corrente AlternataFrancesco TozzettiNessuna valutazione finora
- Domande GeriDocumento15 pagineDomande GeriAntonio La RoccaNessuna valutazione finora
- Dispensa 18 - Esercizi in Aula Ed AltriDocumento13 pagineDispensa 18 - Esercizi in Aula Ed AltriimjappoNessuna valutazione finora
- 2 - Caratteristiche Del Binario - PresentazioneDocumento19 pagine2 - Caratteristiche Del Binario - PresentazionevituzzuNessuna valutazione finora
- Trasporti A FuneDocumento29 pagineTrasporti A FuneGiuseppe Di PalmaNessuna valutazione finora
- Appunti Di Meccanizzazione ForestaleDocumento90 pagineAppunti Di Meccanizzazione ForestaleMarlin ZamoraNessuna valutazione finora
- 1.1 - RUOTE Di FrizioneDocumento13 pagine1.1 - RUOTE Di Frizionedpiperis1118Nessuna valutazione finora
- Dinamica Del Punto-1Documento5 pagineDinamica Del Punto-1Giovanni D'espositoNessuna valutazione finora
- Esercizi Applicazioni Principi Dinamica LiceoDocumento53 pagineEsercizi Applicazioni Principi Dinamica LiceoSara PadovanNessuna valutazione finora
- Tema Esame Svolto Scala MobileDocumento5 pagineTema Esame Svolto Scala MobileLukNessuna valutazione finora
- Area Progetto Cevolani PDFDocumento17 pagineArea Progetto Cevolani PDFman88gioNessuna valutazione finora
- Dispensa CINEMATICADocumento34 pagineDispensa CINEMATICALinda Di FrancoNessuna valutazione finora
- Dinamica Esercizi Svolti 4Documento4 pagineDinamica Esercizi Svolti 4antoniodellisantiNessuna valutazione finora
- 3 - Veicoli e Trasmissioni 13Documento15 pagine3 - Veicoli e Trasmissioni 13mattia2di2chiaraNessuna valutazione finora
- Trasmissioni MeccanicheDocumento56 pagineTrasmissioni MeccanicheDavide MaranoNessuna valutazione finora
- 08.06.01.forze - Moto SolDocumento3 pagine08.06.01.forze - Moto SolGiosue MarianaccioNessuna valutazione finora
- Step MotorsDocumento20 pagineStep MotorsClaudiomeneNessuna valutazione finora
- Esercitazione LavoroDocumento2 pagineEsercitazione LavoroBilalNessuna valutazione finora
- Trasmissioni MeccanicheDocumento16 pagineTrasmissioni MeccanicheClaudioNessuna valutazione finora
- UntitledDocumento5 pagineUntitledMassimiliano FalesiediNessuna valutazione finora
- Fisica CinematicaDocumento6 pagineFisica CinematicajackNessuna valutazione finora
- Analisi Dati Telemetria FSAE ET4Documento13 pagineAnalisi Dati Telemetria FSAE ET4samueleNessuna valutazione finora
- 22-23 Lezione08 Urti & Sistemi Di Punti MaterialiDocumento29 pagine22-23 Lezione08 Urti & Sistemi Di Punti MaterialiMichele FisioNessuna valutazione finora
- ConservazioneEnergia MS Cap12 AmaldiDocumento4 pagineConservazioneEnergia MS Cap12 Amaldialessandro abbateNessuna valutazione finora
- Lezione 11 - PiersDocumento18 pagineLezione 11 - PiersLuca Dal MolinNessuna valutazione finora
- Appunti Di Meccanizzazione Forestale PDFDocumento90 pagineAppunti Di Meccanizzazione Forestale PDFMarlin ZamoraNessuna valutazione finora
- Soluzione Problema1 La SbarrettaDocumento6 pagineSoluzione Problema1 La SbarrettaStefano FortiniNessuna valutazione finora
- Soluzione Di Un Problema Di FiltraggioDocumento5 pagineSoluzione Di Un Problema Di FiltraggioPietro FavalesiNessuna valutazione finora
- Verifica A Cap8 AmaldiDocumento2 pagineVerifica A Cap8 AmaldiDamiano Quagliati100% (1)
- Esercizio 2 InstabilitàDocumento31 pagineEsercizio 2 InstabilitàMarco Raneo PezzanoNessuna valutazione finora
- Verifica B Cap8 AmaldiDocumento2 pagineVerifica B Cap8 AmaldiDamiano Quagliati0% (1)
- Riassunto StradeDocumento59 pagineRiassunto StradeFrancesco PomponioNessuna valutazione finora
- Caratterizzazione Dell'handling Di Un'autovettura Mediante Modelli Matematici Lineari e Non LineariDocumento93 pagineCaratterizzazione Dell'handling Di Un'autovettura Mediante Modelli Matematici Lineari e Non LineariPaolo MartinaNessuna valutazione finora
- Quiz 2Documento18 pagineQuiz 2yannbouzan2005Nessuna valutazione finora
- Lezione 2Documento7 pagineLezione 2Lorenzo CampanellaNessuna valutazione finora
- LezMecc (Trasm Attrito)Documento12 pagineLezMecc (Trasm Attrito)Antonio PagliarisiNessuna valutazione finora
- TAV. 1.2 C - Relazione Di Calcolo Strutturale - Passerella MetallicaDocumento22 pagineTAV. 1.2 C - Relazione Di Calcolo Strutturale - Passerella MetallicaMarco ZanellaNessuna valutazione finora
- Barriere StradaliDocumento12 pagineBarriere StradalicicoduarteNessuna valutazione finora
- LEZIONE 4 - Local EffectDocumento24 pagineLEZIONE 4 - Local EffectLuca Dal MolinNessuna valutazione finora
- Libri UtiliDocumento1 paginaLibri UtiliBiancaNessuna valutazione finora
- Semplificazione Dell'impianto in Applicazioni Ferroviarie: Configurazione Con Chopper Ad Un Quadrante e Controllo Di CampoDocumento1 paginaSemplificazione Dell'impianto in Applicazioni Ferroviarie: Configurazione Con Chopper Ad Un Quadrante e Controllo Di CampoBiancaNessuna valutazione finora
- Alternatore PDFDocumento6 pagineAlternatore PDFBiancaNessuna valutazione finora
- Alternatore PDFDocumento6 pagineAlternatore PDFBiancaNessuna valutazione finora
- Alternatore PDFDocumento6 pagineAlternatore PDFBiancaNessuna valutazione finora
- Libri CapitaniDocumento1 paginaLibri CapitaniBiancaNessuna valutazione finora
- 13w STRUMDocumento18 pagine13w STRUMfabrizioNessuna valutazione finora
- ISBcatalogoDocumento152 pagineISBcatalogoMihai BadulescuNessuna valutazione finora
- 13 TrasformatoreDocumento22 pagine13 TrasformatoremikeNessuna valutazione finora
- Esercizi Sul Secondo Principio Della TermodinamicaDocumento2 pagineEsercizi Sul Secondo Principio Della TermodinamicaMatteo Dal CeroNessuna valutazione finora
- Equivalenza Oli Tra ISO e SAEDocumento1 paginaEquivalenza Oli Tra ISO e SAEmortaio70Nessuna valutazione finora
- Fisica Tecnica AmbientaleDocumento223 pagineFisica Tecnica AmbientaleioenopioNessuna valutazione finora
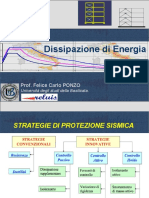
- Strutture in C.A. - Dissipazione Di EnergiaDocumento109 pagineStrutture in C.A. - Dissipazione Di EnergiaGiovanni Govdòn BugliNessuna valutazione finora