Potrebbero piacerti anche
- Relazione-VDocumento10 pagineRelazione-VFederico AnneseNessuna valutazione finora
- AccelerometroDocumento36 pagineAccelerometroAnonimoNessuna valutazione finora
- Misure Di SpostamentoDocumento11 pagineMisure Di SpostamentoGioNessuna valutazione finora
- Sistemi Elettronici A Radio-Frequenza (MIXER) - 4Documento4 pagineSistemi Elettronici A Radio-Frequenza (MIXER) - 4sascia_1775Nessuna valutazione finora
- Cap EstensimetriDocumento7 pagineCap EstensimetriArmando_84Nessuna valutazione finora
- Soluzione Scritto Fis A27 Gennaio 2022Documento4 pagineSoluzione Scritto Fis A27 Gennaio 2022andreaNessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Matt Compierchio100% (1)
- I 14 Esp2Documento15 pagineI 14 Esp2Federico RossiNessuna valutazione finora
- Prontuario Scienze Delle CostruzioniDocumento9 pagineProntuario Scienze Delle CostruzioniGiulio PalamàNessuna valutazione finora
- VolanoDocumento8 pagineVolanoFederico AnneseNessuna valutazione finora
- Corpo RigidoDocumento14 pagineCorpo RigidonicopalNessuna valutazione finora
- MassaMolla GuidabreveDocumento3 pagineMassaMolla GuidabrevePaola CattozzoNessuna valutazione finora
- Filtri AttiviDocumento13 pagineFiltri Attivialeman87Nessuna valutazione finora
- Modelli Dinamici StrumentiDocumento32 pagineModelli Dinamici StrumentiStefanoMarilungoNessuna valutazione finora
- Filtri CON RLDocumento8 pagineFiltri CON RLFilippo CastelliNessuna valutazione finora
- Prova Pratica 1 OscilloscopioDocumento20 pagineProva Pratica 1 OscilloscopiobarrakkuNessuna valutazione finora
- Egidio BergantinoDocumento7 pagineEgidio BergantinoFederico AnneseNessuna valutazione finora
- Appunti Di TelecomunicazioniDocumento43 pagineAppunti Di TelecomunicazionimarcofasoNessuna valutazione finora
- 06-Tensioni Nelle Travi V1-6Documento33 pagine06-Tensioni Nelle Travi V1-6Alessandro Riposi100% (1)
- Relazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreDocumento38 pagineRelazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreFabio MoramarcoNessuna valutazione finora
- Tema 3Documento4 pagineTema 3biancaNessuna valutazione finora
- Esp Fi Sforza TeDocumento5 pagineEsp Fi Sforza TeDavide ArangioNessuna valutazione finora
- Es 5Documento6 pagineEs 5Lodi ManuelaNessuna valutazione finora
- Momenti D'inerziaDocumento5 pagineMomenti D'inerziaDarioPrestiNessuna valutazione finora
- Domande 1°itinere Misure Meccaniche e TermicheDocumento5 pagineDomande 1°itinere Misure Meccaniche e TermicheAnna ScaburriNessuna valutazione finora
- Tipi Di Moto - Fisica MecanicaDocumento3 pagineTipi Di Moto - Fisica Mecanicascoartalacur1Nessuna valutazione finora
- Scivolando Su Un Piano InclinatoDocumento8 pagineScivolando Su Un Piano InclinatoFederico AnneseNessuna valutazione finora
- Formulario + Tavole PDFDocumento25 pagineFormulario + Tavole PDFMarco MirabellaNessuna valutazione finora
- Progetto Di Controlli AutomaticiDocumento13 pagineProgetto Di Controlli AutomaticiLuca NanniNessuna valutazione finora
- Lab1 2019 13 PDFDocumento58 pagineLab1 2019 13 PDFKim DamianiNessuna valutazione finora
- 18 Moto Circolare Uniformemente AcceleratoDocumento5 pagine18 Moto Circolare Uniformemente AcceleratoElena RossiniNessuna valutazione finora
- Prova Pratica 2 OscilloscopioDocumento30 pagineProva Pratica 2 OscilloscopiobarrakkuNessuna valutazione finora
- Es 4Documento6 pagineEs 4Lodi ManuelaNessuna valutazione finora
- Domande Teoria Anni Precedenti Con RispostaDocumento8 pagineDomande Teoria Anni Precedenti Con RispostaWalter WhiteNessuna valutazione finora
- Fisica 2Documento14 pagineFisica 2ELIZABETH RODRIGUEZ MENECESNessuna valutazione finora
- Reologia 1Documento43 pagineReologia 1Eduardo Malebran SotoNessuna valutazione finora
- La Distorsione Di FaseDocumento3 pagineLa Distorsione Di FaseconvefranceNessuna valutazione finora
- 13 Moto Rettilineo Uniformemente Accelerato PDFDocumento7 pagine13 Moto Rettilineo Uniformemente Accelerato PDFAlessandro AlpiNessuna valutazione finora
- Dinamica Del Punto-1Documento5 pagineDinamica Del Punto-1Giovanni D'espositoNessuna valutazione finora
- Bilancia Di CavendishDocumento15 pagineBilancia Di Cavendishgiulio141091Nessuna valutazione finora
- Compito Gennaio ElettronicaDocumento12 pagineCompito Gennaio ElettronicaMattia TreppiediNessuna valutazione finora
- Adc Sigma Delta Stefano SalvatoriDocumento20 pagineAdc Sigma Delta Stefano SalvatorimarisaiennaNessuna valutazione finora
- Analisi Di FourierDocumento5 pagineAnalisi Di FourierGioNessuna valutazione finora
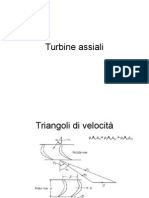
- 4 - Turbine AssialiDocumento37 pagine4 - Turbine AssialiStefano Camillucci0% (1)
- Formulario ControlliDocumento6 pagineFormulario Controllicommon2909Nessuna valutazione finora
- EsonerogennaioDocumento3 pagineEsonerogennaioMichele FruciNessuna valutazione finora
- Sensori e TrasduttoriDocumento68 pagineSensori e TrasduttoriFrancesco TozzettiNessuna valutazione finora
- Vibr2_finDocumento31 pagineVibr2_find.devita.73Nessuna valutazione finora
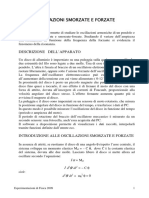
- Oscillazioni Smorzate e ForzateDocumento4 pagineOscillazioni Smorzate e Forzatebgiangre8372Nessuna valutazione finora
- Es Scheda13 PDFDocumento6 pagineEs Scheda13 PDFAttiliodellaGalaNessuna valutazione finora
- Caratteritiche DinamicheDocumento22 pagineCaratteritiche DinamichePepe Huilca CabayNessuna valutazione finora
- La Misura Di DistanzeDocumento8 pagineLa Misura Di DistanzeLucianoNessuna valutazione finora
- Prova Di Laboratorio 3Documento10 pagineProva Di Laboratorio 3Lorenzo Maria MASELLINessuna valutazione finora
- Allegatog Curve FotometricheDocumento7 pagineAllegatog Curve FotometricheSimoneNessuna valutazione finora
- Teoria Della Trave Dinamica Di EuleroDocumento14 pagineTeoria Della Trave Dinamica Di EulerotommasobrugoNessuna valutazione finora
- Studio Di Un Sistema Dinamico Non LineareDocumento7 pagineStudio Di Un Sistema Dinamico Non LinearePietro FavalesiNessuna valutazione finora
- Soluzione Miur Quesiti Simulazione Seconda Prova Fisica 2016Documento5 pagineSoluzione Miur Quesiti Simulazione Seconda Prova Fisica 2016Skuola.netNessuna valutazione finora
- SOLUZIONI ProvaScritta Fisica1 11072022Documento7 pagineSOLUZIONI ProvaScritta Fisica1 11072022alambiccodognoNessuna valutazione finora