Potrebbero piacerti anche
- Walker 1Documento8 pagineWalker 1giacchettoNessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Matt Compierchio100% (1)
- Cinematica FisicaDocumento22 pagineCinematica FisicaCarolaNessuna valutazione finora
- (Ebook - Fisica) Esercizi Svolti Di Fisica 1 (198Pg) PDFDocumento198 pagine(Ebook - Fisica) Esercizi Svolti Di Fisica 1 (198Pg) PDFBarbara Misani75% (4)
- Appunti Di Cinematic A - Moto ParabolicoDocumento10 pagineAppunti Di Cinematic A - Moto ParabolicoantonietNessuna valutazione finora
- Cinematica MessinaDocumento14 pagineCinematica Messinajakipara25Nessuna valutazione finora
- CINEMATICA Del Punto MaterialeDocumento7 pagineCINEMATICA Del Punto MaterialeGabriele De LucaNessuna valutazione finora
- Formula Di PoissonDocumento3 pagineFormula Di PoissonNicola TancrediNessuna valutazione finora
- Appunti IdraulicaDocumento181 pagineAppunti IdraulicaPaolo NizzariNessuna valutazione finora
- Fis1 B01 CinematicaDocumento51 pagineFis1 B01 CinematicaFrancesco PreteNessuna valutazione finora
- Lezione2 Cinematica PDFDocumento27 pagineLezione2 Cinematica PDFAlice PetruccettiNessuna valutazione finora
- 4 Moti RotatoriDocumento11 pagine4 Moti RotatoriCigaciNessuna valutazione finora
- LEZCINEMDocumento12 pagineLEZCINEMobertocNessuna valutazione finora
- Moto CircolareDocumento3 pagineMoto CircolareBetina KindNessuna valutazione finora
- Fis1!0!03 Funzioni VettorialiDocumento16 pagineFis1!0!03 Funzioni VettorialiFrancesco PreteNessuna valutazione finora
- Fisica Generale 2Documento67 pagineFisica Generale 2riccardoNessuna valutazione finora
- 02c Cinematica3-SP - Con NoteDocumento31 pagine02c Cinematica3-SP - Con NoteRossel DiazNessuna valutazione finora
- Moto Circolare UniformeDocumento6 pagineMoto Circolare UniformeEmanuele RameNessuna valutazione finora
- Moto in Due o Tre DimensioniDocumento8 pagineMoto in Due o Tre DimensioniSimone VigoNessuna valutazione finora
- Moto UnidimensionaleDocumento2 pagineMoto Unidimensionalelorisdisilvestro2Nessuna valutazione finora
- CinematicaDocumento7 pagineCinematicaMarco Raneo PezzanoNessuna valutazione finora
- Lezione-CinematicaDocumento29 pagineLezione-Cinematicaelassaouiyassine0Nessuna valutazione finora
- Cap1 MazzoldiDocumento12 pagineCap1 MazzoldiEmanuele MaggiNessuna valutazione finora
- Equazioni 2Documento12 pagineEquazioni 2Marco Raneo PezzanoNessuna valutazione finora
- Tipi Di Moto - Fisica MecanicaDocumento3 pagineTipi Di Moto - Fisica Mecanicascoartalacur1Nessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Davide RaimoNessuna valutazione finora
- 02a Cinematica1-SP - Con NoteDocumento43 pagine02a Cinematica1-SP - Con NoteRossel DiazNessuna valutazione finora
- Accellerazione Nel Moto CurvilienoDocumento3 pagineAccellerazione Nel Moto CurvilienogianluigiNessuna valutazione finora
- 3.cinematica 1Documento7 pagine3.cinematica 1boom shakalakaNessuna valutazione finora
- Lezione Sul Moto Rettilineo UniformeDocumento8 pagineLezione Sul Moto Rettilineo UniformebackupfotomegaNessuna valutazione finora
- Mecca NicaDocumento93 pagineMecca NicaFabiola DongmoNessuna valutazione finora
- 1 04 CinematicaPianoDocumento17 pagine1 04 CinematicaPianoLuca SchiavonNessuna valutazione finora
- Riassunto StradeDocumento59 pagineRiassunto StradeFrancesco PomponioNessuna valutazione finora
- B.Meccanica4_2021-22Documento32 pagineB.Meccanica4_2021-22catotaevelyn2111Nessuna valutazione finora
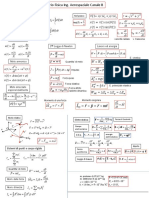
- Formulario CanalebDocumento2 pagineFormulario CanalebjjjNessuna valutazione finora
- Appunti FisicaDocumento6 pagineAppunti FisicajeckodevNessuna valutazione finora
- Riassunto Teoremi Fisica IDocumento6 pagineRiassunto Teoremi Fisica ICarlo BurresiNessuna valutazione finora
- Derivata VettoriDocumento4 pagineDerivata VettoriTommasoDominatoNessuna valutazione finora
- Lezione 6 Dinamica Moto CircolareDocumento15 pagineLezione 6 Dinamica Moto Circolarereby pisaNessuna valutazione finora
- Meccanica OrbitaleDocumento9 pagineMeccanica Orbitalefluffa23Nessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 3 - Aa 2018-19Documento13 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 3 - Aa 2018-19antonioNessuna valutazione finora
- Formula RioDocumento9 pagineFormula RioNapoli MilanoNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 4 - Aa 2018-19Documento9 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 4 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 5 - Aa 2018-19Documento15 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 5 - Aa 2018-19antonioNessuna valutazione finora
- Fisica Lezione02 ProfGiavazziDocumento30 pagineFisica Lezione02 ProfGiavazziRenata WürziusNessuna valutazione finora
- Elementi Di Stabilità PDFDocumento12 pagineElementi Di Stabilità PDFAleNessuna valutazione finora
- Dinamica Corpo RigidooDocumento54 pagineDinamica Corpo RigidooRossana LimaNessuna valutazione finora
- Riassunti FisicaDocumento79 pagineRiassunti FisicaAlessia PapaNessuna valutazione finora
- CampicentraliDocumento38 pagineCampicentraliTh3Fr1x ZelioNessuna valutazione finora
- 2c - AttritoDocumento19 pagine2c - Attritopolaise_rockNessuna valutazione finora
- Trasformata del radon: Svelare modelli nascosti nei dati visiviDa EverandTrasformata del radon: Svelare modelli nascosti nei dati visiviNessuna valutazione finora
- Omografia: Omografia: trasformazioni nella visione artificialeDa EverandOmografia: Omografia: trasformazioni nella visione artificialeNessuna valutazione finora
- Esercizi di matematica: funzioni reali a più variabiliDa EverandEsercizi di matematica: funzioni reali a più variabiliNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 12 - Aa 2018-19Documento11 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 12 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 10 - Aa 2018-19Documento13 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 10 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 9 - Aa 2018-19Documento32 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 9 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 11 - Aa 2018-19Documento28 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 11 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 6 - Aa 2018-19Documento11 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 6 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 7 - Aa 2018-19Documento31 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 7 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 8 - Aa 2018-19Documento26 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 8 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 5 - Aa 2018-19Documento15 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 5 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 4 - Aa 2018-19Documento9 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 4 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 3 - Aa 2018-19Documento13 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 3 - Aa 2018-19antonioNessuna valutazione finora
- Fondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 1 - Aa 2018-19Documento31 pagineFondamenti Di Meccanica e Biomeccanica Del Professore Leban - Lez 1 - Aa 2018-19antonioNessuna valutazione finora
- ES. CinematicaDocumento3 pagineES. CinematicaLuigi ReveruzziNessuna valutazione finora
- Formulario Fisica 15Documento1 paginaFormulario Fisica 15Ruslan Ureña SaavedraNessuna valutazione finora
- Introduzione All'Analisi Cinematica - CocchettiDocumento43 pagineIntroduzione All'Analisi Cinematica - Cocchettifluffa23Nessuna valutazione finora
- Manual Reversores ZF PDFDocumento494 pagineManual Reversores ZF PDFRogério RealeNessuna valutazione finora
- Simboli StaticaDocumento3 pagineSimboli StaticaDoraDienaNessuna valutazione finora
- Vincoli MonolateriDocumento8 pagineVincoli Monolateriantonioviton07vkNessuna valutazione finora
- Esercizi MAM 01Documento2 pagineEsercizi MAM 01Matteo CovielloNessuna valutazione finora