Potrebbero piacerti anche
- Trasmissioni MeccanicheDocumento52 pagineTrasmissioni Meccanicheeustachio.cosolaNessuna valutazione finora
- Area Progetto Cevolani PDFDocumento17 pagineArea Progetto Cevolani PDFman88gioNessuna valutazione finora
- 1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10Documento136 pagine1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10riccardoNessuna valutazione finora
- Quadrilatero ArticolatoDocumento9 pagineQuadrilatero ArticolatoraffacapNessuna valutazione finora
- Corpo RigidoDocumento10 pagineCorpo Rigidoguiguislo200336Nessuna valutazione finora
- Cap5.1 Introduzione Turbomacchine PDFDocumento8 pagineCap5.1 Introduzione Turbomacchine PDFDaniloNessuna valutazione finora
- Screenshot 2022-03-21 (11.46.45)Documento33 pagineScreenshot 2022-03-21 (11.46.45)mmmmmmkjmkNessuna valutazione finora
- Turbine AssialiDocumento44 pagineTurbine Assialiannalisa.d.orazio5738Nessuna valutazione finora
- Albero 2Documento9 pagineAlbero 2emmene freNessuna valutazione finora
- Coppie Cinematic He e MeccanismiDocumento12 pagineCoppie Cinematic He e MeccanismiRaffaella BruniNessuna valutazione finora
- Diagramma Circolare MatDocumento7 pagineDiagramma Circolare MatPiero FranciaNessuna valutazione finora
- (Ingegneria - Ebook) Jacazio-Piombo - (Meccanica Applicata Alle Macchine) Vol 1-OCR-2Documento143 pagine(Ingegneria - Ebook) Jacazio-Piombo - (Meccanica Applicata Alle Macchine) Vol 1-OCR-2anderNessuna valutazione finora
- 2 - Stato Di Deformazione - PpsDocumento21 pagine2 - Stato Di Deformazione - PpsMaurizio LunatiNessuna valutazione finora
- FGFGGDocumento55 pagineFGFGGzaq123edcvbgt567Nessuna valutazione finora
- 2 Accoppiamenti CinematiciDocumento20 pagine2 Accoppiamenti Cinematici8848by7zdrNessuna valutazione finora
- SterzoDocumento15 pagineSterzoDario MarcoraNessuna valutazione finora
- Bozza Appunti Riduttori A ViteDocumento14 pagineBozza Appunti Riduttori A VitemgualdiNessuna valutazione finora
- Analisi Teorica e Sperimentale Del Rendimento Di Riduttori EpicicloidaliDocumento27 pagineAnalisi Teorica e Sperimentale Del Rendimento Di Riduttori Epicicloidalidon-donnolaNessuna valutazione finora
- Ruote Dentate - Della Pietra PDFDocumento33 pagineRuote Dentate - Della Pietra PDFmgualdiNessuna valutazione finora
- Trasmissioni MeccanicheDocumento56 pagineTrasmissioni MeccanicheDavide MaranoNessuna valutazione finora
- A2 Il Motore Asincrono Trifase 2010Documento8 pagineA2 Il Motore Asincrono Trifase 2010Ortensia Del LagoNessuna valutazione finora
- R03 - Evolvente Del CerchioDocumento2 pagineR03 - Evolvente Del Cerchioperty92Nessuna valutazione finora
- Diagrammi Di Perrine-Baum e CircolariDocumento70 pagineDiagrammi Di Perrine-Baum e CircolariPablo Daniel DiazNessuna valutazione finora
- Commec DR 2014Documento35 pagineCommec DR 2014giuseppe baldassarreNessuna valutazione finora
- 05 Dispensa Trasmissione Del MotoDocumento38 pagine05 Dispensa Trasmissione Del MotolunardinhoNessuna valutazione finora
- Cristallografia Mineralogia DidacticDocumento33 pagineCristallografia Mineralogia DidacticVanessa ToniniNessuna valutazione finora
- Cilindri Grosso Spessore e Dischi RotantiDocumento58 pagineCilindri Grosso Spessore e Dischi RotantiPippo FrancoNessuna valutazione finora
- Meccan Is MiDocumento38 pagineMeccan Is MiJoel FerrerNessuna valutazione finora
- Cilindri Grosso Spessore e Dischi RotantiDocumento58 pagineCilindri Grosso Spessore e Dischi RotantiPietroNessuna valutazione finora
- MANOVELLISMO e GLIFO 2018 PDFDocumento14 pagineMANOVELLISMO e GLIFO 2018 PDFDavide Di PietroNessuna valutazione finora
- Esercizi TrasmissioniDocumento14 pagineEsercizi TrasmissioniFrancesco CangioliNessuna valutazione finora
- Cinematica GraficaDocumento5 pagineCinematica GraficaAnonymous f3iGLjxNessuna valutazione finora
- 16 Macchine AsincroneDocumento23 pagine16 Macchine AsincronemikeNessuna valutazione finora
- MAP Es 6Documento5 pagineMAP Es 6Francesco Provenzano100% (2)
- 21 - Trasmissioni Con Organi FlessibiliDocumento10 pagine21 - Trasmissioni Con Organi FlessibiliLeonardo CaverzanNessuna valutazione finora
- Il Metodo Degli Elementi FinitiDocumento41 pagineIl Metodo Degli Elementi FinitiD RashNessuna valutazione finora
- Ruote e RotismiDocumento37 pagineRuote e Rotismifabio106Nessuna valutazione finora
- Anteprima Meccanica Del VoloDocumento20 pagineAnteprima Meccanica Del VoloAndrea QuinciNessuna valutazione finora
- Teoria 07. Fluidi Viscosi - Moto in Condotte - v1.5 PDFDocumento16 pagineTeoria 07. Fluidi Viscosi - Moto in Condotte - v1.5 PDFAlaa AwadNessuna valutazione finora
- Triangoli Di VelocitàDocumento4 pagineTriangoli Di VelocitàGiovanni SalviNessuna valutazione finora
- Preview MAMI EserciziDocumento10 paginePreview MAMI EserciziMichele Pepe100% (1)
- APPUNTI Meccanica Della Frattura 2019 - Prima ParteDocumento40 pagineAPPUNTI Meccanica Della Frattura 2019 - Prima ParteCRISTIAN MONTESANONessuna valutazione finora
- CAP10 RotismiordinariedepicicloidaliDocumento18 pagineCAP10 RotismiordinariedepicicloidaliElisa GuidiNessuna valutazione finora
- Moto CircolareDocumento4 pagineMoto CircolareMarco Stiz DalpiazNessuna valutazione finora
- 09 Tornanti - Curve Di Transizione PDFDocumento8 pagine09 Tornanti - Curve Di Transizione PDFkamelNessuna valutazione finora
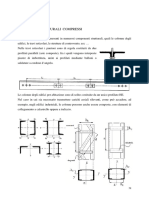
- Lezione 18 - Elementi Strutturali CompressiDocumento8 pagineLezione 18 - Elementi Strutturali Compressiil mascheratoNessuna valutazione finora
- Linea Elastica Flessionale - TecnoLogicaDocumento1 paginaLinea Elastica Flessionale - TecnoLogicaTrinchettoNessuna valutazione finora
- TMoperatriciDocumento19 pagineTMoperatricidavideNessuna valutazione finora
- 04 - Cinematica Diretta Ed Inversa Manipolatori SerialiDocumento55 pagine04 - Cinematica Diretta Ed Inversa Manipolatori SerialiafafoNessuna valutazione finora
- Appunti Vibrazioni TorsionaliDocumento12 pagineAppunti Vibrazioni Torsionalid4v1d3-1Nessuna valutazione finora
- La Trasmissione NegliazionamentiDocumento3 pagineLa Trasmissione NegliazionamentiGIOVANNI MIGLIETTANessuna valutazione finora
- Similitudine IdraulicaDocumento11 pagineSimilitudine IdraulicaAndreaNessuna valutazione finora
- Parte I - 4 La StrutturaDocumento19 pagineParte I - 4 La StrutturaMatteo OliveriNessuna valutazione finora
- Ruote DentateDocumento27 pagineRuote DentateobertocNessuna valutazione finora
- Relazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreDocumento38 pagineRelazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreFabio MoramarcoNessuna valutazione finora
- Costruzione Di MacchineDocumento360 pagineCostruzione Di MacchineFilippo MoserleNessuna valutazione finora
- 02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Documento11 pagine02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Armando Di ChiaraNessuna valutazione finora
- Teoria 7. Fluidi Viscosi - Moto in Condotte v1.2Documento15 pagineTeoria 7. Fluidi Viscosi - Moto in Condotte v1.2Ferruccio RossiNessuna valutazione finora
- La Resistenza Degli IngranaggiDocumento37 pagineLa Resistenza Degli IngranaggiLuca L.Nessuna valutazione finora
- Dispense Costruzione Di Macchine Vol.2 - AndornoDocumento188 pagineDispense Costruzione Di Macchine Vol.2 - AndornocarlonewmannNessuna valutazione finora
- AutotrazioneDocumento28 pagineAutotrazioneLuca L.Nessuna valutazione finora
- 2 Forze Ideali1112Documento8 pagine2 Forze Ideali1112Luca L.Nessuna valutazione finora
- Trasmissione Del Moto - Ruote Di FrizioneDocumento13 pagineTrasmissione Del Moto - Ruote Di FrizioneferrariandreaNessuna valutazione finora
- Seat Arona Scheda TecnicaDocumento3 pagineSeat Arona Scheda TecnicaBlogo MotoriNessuna valutazione finora
- Spare Parts Catalogue HD9 E.3 6X6Documento9.317 pagineSpare Parts Catalogue HD9 E.3 6X6emadnaguibNessuna valutazione finora
- Gilera Nexus 300 Service ManualDocumento315 pagineGilera Nexus 300 Service Manualnovy50% (2)
- Manual de Taller SERIES TRHDocumento318 pagineManual de Taller SERIES TRHAlfonso TabuencaNessuna valutazione finora
- Tesi DifferenzialeDocumento123 pagineTesi DifferenzialeDomenico GarofaloNessuna valutazione finora
- Expert secrets: Come i migliori esperti e consulenti possono crescere onlineDa EverandExpert secrets: Come i migliori esperti e consulenti possono crescere onlineNessuna valutazione finora
- Dotcom secrets: Il bestseller mondiale per fare business onlineDa EverandDotcom secrets: Il bestseller mondiale per fare business onlineNessuna valutazione finora
- Autodesk Inventor | Passo dopo Passo: Progettazione CAD e Simulazione FEM con Autodesk Inventor per PrincipiantiDa EverandAutodesk Inventor | Passo dopo Passo: Progettazione CAD e Simulazione FEM con Autodesk Inventor per PrincipiantiNessuna valutazione finora
- Metaverso: La guida visionaria per principianti per scoprire ed investire nelle Terre Virtuali, nei giochi nella blockchain, nell’arte digitale degli NFT e nelle affascinanti tecnologie del VRDa EverandMetaverso: La guida visionaria per principianti per scoprire ed investire nelle Terre Virtuali, nei giochi nella blockchain, nell’arte digitale degli NFT e nelle affascinanti tecnologie del VRValutazione: 5 su 5 stelle5/5 (8)
- Dal Cad al Web: Il Codice dell’Amministrazione Digitale per TuttiDa EverandDal Cad al Web: Il Codice dell’Amministrazione Digitale per TuttiNessuna valutazione finora
- Nuovo Esame per Esperto in Gestione dell'Energia - Settore Civile: Test e temi di esame svolti per sostenere l’esame di Esperto in Gestione dell’Energia del Settore CivileDa EverandNuovo Esame per Esperto in Gestione dell'Energia - Settore Civile: Test e temi di esame svolti per sostenere l’esame di Esperto in Gestione dell’Energia del Settore CivileNessuna valutazione finora
- Il montaggio efficace: Guida all’uso di ShotcutDa EverandIl montaggio efficace: Guida all’uso di ShotcutNessuna valutazione finora
- Manuale d'uso per Networker: 7 Segreti per Sponsorizzare con SuccessoDa EverandManuale d'uso per Networker: 7 Segreti per Sponsorizzare con SuccessoNessuna valutazione finora
- Altro Evo, l'Album delle illustrazioni: Digital painting, sword and sorcery fantasy art bookDa EverandAltro Evo, l'Album delle illustrazioni: Digital painting, sword and sorcery fantasy art bookNessuna valutazione finora
- SQL per principianti: imparate l'uso dei database Microsoft SQL Server, MySQL, PostgreSQL e OracleDa EverandSQL per principianti: imparate l'uso dei database Microsoft SQL Server, MySQL, PostgreSQL e OracleNessuna valutazione finora
- Javascript: Un Manuale Per Imparare La Programmazione In JavascriptDa EverandJavascript: Un Manuale Per Imparare La Programmazione In JavascriptNessuna valutazione finora
- Elettrotecnica Generale: Circuiti Elettrici in Regime StazionarioDa EverandElettrotecnica Generale: Circuiti Elettrici in Regime StazionarioNessuna valutazione finora
- Vincere sui social: Come i grandi imprenditori costruiscono il loro business e la loro influenza e come puoi farlo anche tu!Da EverandVincere sui social: Come i grandi imprenditori costruiscono il loro business e la loro influenza e come puoi farlo anche tu!Nessuna valutazione finora
- Nuovo Esame per Esperto in Gestione dell'Energia Settore Industriale: Test e temi di esame svolti per sostenere l’esame di Esperto in Gestione dell’Energia del Settore IndustrialeDa EverandNuovo Esame per Esperto in Gestione dell'Energia Settore Industriale: Test e temi di esame svolti per sostenere l’esame di Esperto in Gestione dell’Energia del Settore IndustrialeNessuna valutazione finora
- PHP: Guida Completa allo Sviluppo e Programmazione di Siti Web Dinamici. Contiene Esempi di Codice ed Esercizi Pratici.Da EverandPHP: Guida Completa allo Sviluppo e Programmazione di Siti Web Dinamici. Contiene Esempi di Codice ed Esercizi Pratici.Nessuna valutazione finora
- L'era dell'Intelligenza Artificiale: Come l'AI sta rivoluzionando le nostre viteDa EverandL'era dell'Intelligenza Artificiale: Come l'AI sta rivoluzionando le nostre viteNessuna valutazione finora