Potrebbero piacerti anche
- Es (Albero Perni)Documento2 pagineEs (Albero Perni)Paride ToselliNessuna valutazione finora
- Avalle Polito PDFDocumento205 pagineAvalle Polito PDFGianni CiavattaNessuna valutazione finora
- Esercizio 2 InstabilitàDocumento31 pagineEsercizio 2 InstabilitàMarco Raneo PezzanoNessuna valutazione finora
- Esercizi TrasmissioniDocumento14 pagineEsercizi TrasmissioniFrancesco CangioliNessuna valutazione finora
- Lezione 9 - Introduzione Ad Archi Volte e CupoleDocumento75 pagineLezione 9 - Introduzione Ad Archi Volte e CupoleAntonio RimaNessuna valutazione finora
- Esercitazione Carroponte - 6 PDFDocumento4 pagineEsercitazione Carroponte - 6 PDFgpcatNessuna valutazione finora
- Prontuario Scienze Delle CostruzioniDocumento9 pagineProntuario Scienze Delle CostruzioniGiulio PalamàNessuna valutazione finora
- Esercizi Spinta Cuscinetti Ingranaggi Avalle Polito PDFDocumento205 pagineEsercizi Spinta Cuscinetti Ingranaggi Avalle Polito PDFmgualdiNessuna valutazione finora
- Relazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreDocumento38 pagineRelazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreFabio MoramarcoNessuna valutazione finora
- MAP Es 6Documento5 pagineMAP Es 6Francesco Provenzano100% (2)
- Corpo RigidoDocumento10 pagineCorpo Rigidoguiguislo200336Nessuna valutazione finora
- 1 Modelli PianiDocumento56 pagine1 Modelli Pianiantonioviton07vkNessuna valutazione finora
- Help Calcolo Lin FunDocumento9 pagineHelp Calcolo Lin FunGiancarlo MoiNessuna valutazione finora
- Eser3 1Documento6 pagineEser3 1Lkh dmtNessuna valutazione finora
- Lezione Sul Moto Rettilineo UniformeDocumento8 pagineLezione Sul Moto Rettilineo UniformebackupfotomegaNessuna valutazione finora
- Albero Iperstatico 2Documento8 pagineAlbero Iperstatico 2emmene freNessuna valutazione finora
- 09 Tornanti - Curve Di Transizione PDFDocumento8 pagine09 Tornanti - Curve Di Transizione PDFkamelNessuna valutazione finora
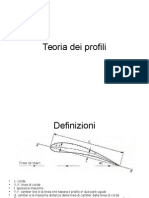
- 2 - Teoria Dei ProfiliDocumento55 pagine2 - Teoria Dei ProfiliStefano CamillucciNessuna valutazione finora
- Esercitazione 7 - FMSDocumento6 pagineEsercitazione 7 - FMSGiuseppe ScrimaliNessuna valutazione finora
- 2006.02.13 - III - Appello - Testo - SoluzioniDocumento6 pagine2006.02.13 - III - Appello - Testo - Soluzionigesu.promettimiNessuna valutazione finora
- Ponti Ad Arco o in Muratura PDFDocumento32 paginePonti Ad Arco o in Muratura PDFgabrieleNessuna valutazione finora
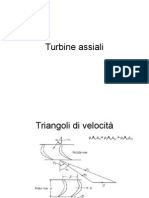
- Turbine AssialiDocumento44 pagineTurbine Assialiannalisa.d.orazio5738Nessuna valutazione finora
- Appunti Vibrazioni TorsionaliDocumento12 pagineAppunti Vibrazioni Torsionalid4v1d3-1Nessuna valutazione finora
- 4 - Turbine AssialiDocumento37 pagine4 - Turbine AssialiStefano Camillucci0% (1)
- 02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Documento11 pagine02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Armando Di ChiaraNessuna valutazione finora
- Cilindri in PressioneDocumento10 pagineCilindri in PressionepamelaNessuna valutazione finora
- Momento ElectricoDocumento15 pagineMomento Electricomanuel_clemente_18Nessuna valutazione finora
- Compito 18 Gennaio 2022 (Soluzioni)Documento8 pagineCompito 18 Gennaio 2022 (Soluzioni)Nessuno Di PossibileNessuna valutazione finora
- CAP3Documento27 pagineCAP3Giuseppe LaudaniNessuna valutazione finora
- Cap5.1 Introduzione Turbomacchine PDFDocumento8 pagineCap5.1 Introduzione Turbomacchine PDFDaniloNessuna valutazione finora
- Dinamica RotazionaleDocumento28 pagineDinamica RotazionaleAnonymous IewbxEjCNessuna valutazione finora
- Telaio Metodo Matriciale (Fabio Di Trapani)Documento17 pagineTelaio Metodo Matriciale (Fabio Di Trapani)Raducanu TheodorNessuna valutazione finora
- Regola Della Traslazione PDFDocumento16 pagineRegola Della Traslazione PDFChiaraNessuna valutazione finora
- La Trasmissione NegliazionamentiDocumento3 pagineLa Trasmissione NegliazionamentiGIOVANNI MIGLIETTANessuna valutazione finora
- 1° ProblemaDocumento2 pagine1° ProblemaDomenico TaglienteNessuna valutazione finora
- AlberiDocumento12 pagineAlberimarco.dado2700Nessuna valutazione finora
- 12 - Diagrammi Delle Caratteristiche Per Strutture IsostaticheDocumento42 pagine12 - Diagrammi Delle Caratteristiche Per Strutture IsostaticheFederica MililloNessuna valutazione finora
- Strategia Di Controllo Del Motore BrushlessDocumento35 pagineStrategia Di Controllo Del Motore BrushlessStefano Del TedescoNessuna valutazione finora
- 2023.04.26 Itinere-Fisica-Generale v2Documento7 pagine2023.04.26 Itinere-Fisica-Generale v2Giulio DorazioNessuna valutazione finora
- Testo 4 PDFDocumento15 pagineTesto 4 PDFGiovanniNessuna valutazione finora
- Macchine Operatrici Triangolo Delle VelocitàDocumento203 pagineMacchine Operatrici Triangolo Delle VelocitàSalvoNessuna valutazione finora
- MANOVELLISMO e GLIFO 2018 PDFDocumento14 pagineMANOVELLISMO e GLIFO 2018 PDFDavide Di PietroNessuna valutazione finora
- I Corollari Di Mohr Per Il Calcolo Degli SpostamentiDocumento15 pagineI Corollari Di Mohr Per Il Calcolo Degli SpostamentiLorenzo CaniparoliNessuna valutazione finora
- Pilastri Instabilità Colonna Modello PDFDocumento22 paginePilastri Instabilità Colonna Modello PDFAleksiey PellicciaNessuna valutazione finora
- Diagramma Circolare HeylandDocumento8 pagineDiagramma Circolare Heylanddimay36641Nessuna valutazione finora
- Il Motore Brushless (Complesso)Documento18 pagineIl Motore Brushless (Complesso)sanboa3Nessuna valutazione finora
- 21 VitiBulloniSerraggiDocumento9 pagine21 VitiBulloniSerraggicastibraNessuna valutazione finora
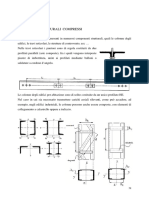
- Lezione 18 - Elementi Strutturali CompressiDocumento8 pagineLezione 18 - Elementi Strutturali Compressiil mascheratoNessuna valutazione finora
- 1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10Documento136 pagine1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10riccardoNessuna valutazione finora
- 16 Macchine AsincroneDocumento23 pagine16 Macchine AsincronemikeNessuna valutazione finora
- 46030541esercitazione8 1Documento4 pagine46030541esercitazione8 1ManuelLentiNessuna valutazione finora
- Traccia Di Relazione Tecnica Sulla Verifica Statica e A Fatica Della Ruota DentataDocumento17 pagineTraccia Di Relazione Tecnica Sulla Verifica Statica e A Fatica Della Ruota Dentatatoldone92Nessuna valutazione finora
- FisicaI TsDocumento5 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Linea Elastica Flessionale - TecnoLogicaDocumento1 paginaLinea Elastica Flessionale - TecnoLogicaTrinchettoNessuna valutazione finora
- R03 - Evolvente Del CerchioDocumento2 pagineR03 - Evolvente Del Cerchioperty92Nessuna valutazione finora
- CinghiaDocumento7 pagineCinghiaGiotto AutomazioniNessuna valutazione finora
- Esercizi di matematica: integrali di linea, di superficie e di volumeDa EverandEsercizi di matematica: integrali di linea, di superficie e di volumeNessuna valutazione finora
- 2013 2014 02relazione Specialisticaimpianto FotovoltaicobDocumento37 pagine2013 2014 02relazione Specialisticaimpianto Fotovoltaicobpeloduro1010Nessuna valutazione finora
- Elementi Di Acustica Applicata - AUT. Cammarata G.Documento108 pagineElementi Di Acustica Applicata - AUT. Cammarata G.Pino SpinettiNessuna valutazione finora
- Approfondimento Su PSTDocumento3 pagineApprofondimento Su PSTCesar HerreraNessuna valutazione finora
- Catalog LV ENERLUX's ProductsDocumento56 pagineCatalog LV ENERLUX's ProductsLinh VănNessuna valutazione finora
- Echo 4000 - 5000 - 6000 CVDocumento6 pagineEcho 4000 - 5000 - 6000 CVWilian Dos SantosNessuna valutazione finora
- ScaricatoriDocumento12 pagineScaricatoriKlein MauroNessuna valutazione finora
- Riellomini 13Documento10 pagineRiellomini 13Luigi BorgeseNessuna valutazione finora