Potrebbero piacerti anche
- Pillole Armamento-RallentamentiDocumento16 paginePillole Armamento-RallentamentiRaffaele de RonzoNessuna valutazione finora
- Guide Lineari RiassuntoDocumento11 pagineGuide Lineari RiassuntoMattia IaconoNessuna valutazione finora
- 02 - Sistemi DiDocumento49 pagine02 - Sistemi DiJorge PeraltaNessuna valutazione finora
- 2° Parte Strade - 1Documento36 pagine2° Parte Strade - 1Samuel ManninoNessuna valutazione finora
- 03 Dinamica VeicoloDocumento39 pagine03 Dinamica VeicoloAaas sssNessuna valutazione finora
- Barriere StradaliDocumento12 pagineBarriere StradalicicoduarteNessuna valutazione finora
- Riassunto StradeDocumento59 pagineRiassunto StradeFrancesco PomponioNessuna valutazione finora
- AzionamentoDocumento68 pagineAzionamentoValeriaNessuna valutazione finora
- pr138 Visuali Per La SicurezzaDocumento1 paginapr138 Visuali Per La SicurezzaGiuseppe Di RuoccoNessuna valutazione finora
- Strade Ferrovie Aeroporti 1 Dimensionamento SezioniDocumento26 pagineStrade Ferrovie Aeroporti 1 Dimensionamento SezioninicolaNessuna valutazione finora
- 1 Indicazioni - TecnicheDocumento52 pagine1 Indicazioni - TecnicheLorenzo ToccaceliNessuna valutazione finora
- Seminario Ruote Dentate 2018-2Documento60 pagineSeminario Ruote Dentate 2018-2alessandroNessuna valutazione finora
- Attrito e Sicurezza Stradale Scheda np071sd PDFDocumento3 pagineAttrito e Sicurezza Stradale Scheda np071sd PDFElena AbateNessuna valutazione finora
- Anteprima Meccanica Del VoloDocumento20 pagineAnteprima Meccanica Del VoloAndrea QuinciNessuna valutazione finora
- ISB Cuscinetti A Rullini Needle Bearings 01.09.19 21Documento33 pagineISB Cuscinetti A Rullini Needle Bearings 01.09.19 21MECING LTDANessuna valutazione finora
- Normativa Iso 6336 ResocontoDocumento9 pagineNormativa Iso 6336 Resocontomatteo muttiNessuna valutazione finora
- CAP3 Portanza Profili AliDocumento41 pagineCAP3 Portanza Profili AliFederico VanziniNessuna valutazione finora
- Norma Tecnica Italiana NTC 2008 421-438Documento18 pagineNorma Tecnica Italiana NTC 2008 421-438Edgar CondeNessuna valutazione finora
- 1.4 Riferimenti Normativi: Pagina 6Documento11 pagine1.4 Riferimenti Normativi: Pagina 6AleNessuna valutazione finora
- Moto Uniformemente Accelerato e Spazio Di-Arresto np108sdDocumento3 pagineMoto Uniformemente Accelerato e Spazio Di-Arresto np108sdFrancesca Del TestaNessuna valutazione finora
- Prove Meccaniche ITADocumento7 pagineProve Meccaniche ITAIva NoNessuna valutazione finora
- Cuscinetti VolventiDocumento59 pagineCuscinetti VolventicasaNessuna valutazione finora
- Norme e Leggi Sul CarroponteDocumento3 pagineNorme e Leggi Sul CarroponteGMSNessuna valutazione finora
- Aerodinamica Del Velivolo (Cap.5)Documento16 pagineAerodinamica Del Velivolo (Cap.5)jonathan.gelli5153100% (1)
- Fondazioni - Dimensionamento Di Una Fondazione Diretta - Mandolini & ViggianiDocumento9 pagineFondazioni - Dimensionamento Di Una Fondazione Diretta - Mandolini & ViggianiMARIONessuna valutazione finora
- 07 - CCAE - Metodi Di Affidabilità StrutturaleDocumento21 pagine07 - CCAE - Metodi Di Affidabilità StrutturaleuniversalmenteNessuna valutazione finora
- Contatto Pneumatico - StradaDocumento40 pagineContatto Pneumatico - StradaDomenico GarofaloNessuna valutazione finora
- 1.1 - RUOTE Di FrizioneDocumento13 pagine1.1 - RUOTE Di Frizionedpiperis1118Nessuna valutazione finora
- Bibbia Della DinamicaDocumento7 pagineBibbia Della DinamicaGiovanni SecondoNessuna valutazione finora
- Presentazione MARSDocumento43 paginePresentazione MARSNunzioBestNessuna valutazione finora
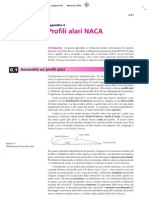
- Profili NACA PDFDocumento7 pagineProfili NACA PDFflystudio3dNessuna valutazione finora
- Primo Esercizio - Consegna 9 MaggioDocumento2 paginePrimo Esercizio - Consegna 9 MaggioLaura GuerraNessuna valutazione finora
- AvancorsaDocumento4 pagineAvancorsaFrancesco PiniNessuna valutazione finora
- ORGANI DI MACCHINE: Collegamenti A Vite - Parte 2Documento4 pagineORGANI DI MACCHINE: Collegamenti A Vite - Parte 2Fabrizio SchwarzNessuna valutazione finora
- Domande PGVDocumento3 pagineDomande PGVzetalfaNessuna valutazione finora
- lezioniMM 8b 9 - 22 23.10.2020Documento29 paginelezioniMM 8b 9 - 22 23.10.2020emmene freNessuna valutazione finora
- A06 Resistenze 06Documento35 pagineA06 Resistenze 06LudovicoVicoNessuna valutazione finora
- FrenaturaDocumento4 pagineFrenaturalmax53Nessuna valutazione finora
- Area Progetto Cevolani PDFDocumento17 pagineArea Progetto Cevolani PDFman88gioNessuna valutazione finora
- Azion BrushDocumento10 pagineAzion BrushGiuseppe LaudaniNessuna valutazione finora
- Note Tecniche ITADocumento36 pagineNote Tecniche ITArycproyectistaNessuna valutazione finora
- 02 Progetto Cambio IngranaggiDocumento30 pagine02 Progetto Cambio IngranaggimgualdiNessuna valutazione finora
- Catalogo Nero S MadrevitiDocumento14 pagineCatalogo Nero S MadrevitiMarco Raneo PezzanoNessuna valutazione finora
- 18 Interventi Antiribaltamento Progetto Sisma Bonus 110 OlympusDocumento10 pagine18 Interventi Antiribaltamento Progetto Sisma Bonus 110 OlympusshivahpcNessuna valutazione finora
- Dispense MApp Cap5 NewDocumento11 pagineDispense MApp Cap5 NewManuel LentiNessuna valutazione finora
- 11.strato LimiteDocumento25 pagine11.strato LimiteAlessandro BaghinNessuna valutazione finora
- Epnm 1 IntroduzioneDocumento29 pagineEpnm 1 IntroduzionenaufragatoNessuna valutazione finora
- TrasportiDocumento24 pagineTrasportiPellegrino De GisiNessuna valutazione finora
- Il Veicolo Isolato Rev 2017-03-28Documento19 pagineIl Veicolo Isolato Rev 2017-03-28Cerasani RoccoNessuna valutazione finora
- Metodo Di Mononobe e OkabeDocumento17 pagineMetodo Di Mononobe e OkabeTommaso CiccaroneNessuna valutazione finora
- Macstars W 4.0 - Note Tecniche - ITADocumento48 pagineMacstars W 4.0 - Note Tecniche - ITAsimone stano0% (1)
- Domande RADocumento9 pagineDomande RAZ libNessuna valutazione finora
- Prove Meccaniche Modulo ResistenzaDocumento30 pagineProve Meccaniche Modulo Resistenzalmax53Nessuna valutazione finora
- LEZCINEMDocumento12 pagineLEZCINEMobertocNessuna valutazione finora
- 06 11 19.odtDocumento10 pagine06 11 19.odtBiancaNessuna valutazione finora
- Modalita Di Posa Di Condotte PolietileneDocumento27 pagineModalita Di Posa Di Condotte PolietilenelorisNessuna valutazione finora
- 01 TRIS Sistemi AntiDive AntiSquatDocumento10 pagine01 TRIS Sistemi AntiDive AntiSquatyoseikan1972_2122132Nessuna valutazione finora
- MacStars 2000 Nota Tecnica ITADocumento49 pagineMacStars 2000 Nota Tecnica ITACarlos Antonio Marcos VillavicencioNessuna valutazione finora
- Esercizi di matematica: funzioni reali a più variabiliDa EverandEsercizi di matematica: funzioni reali a più variabiliNessuna valutazione finora
- ROSANDRA - Spigolo VerdeDocumento3 pagineROSANDRA - Spigolo VerdeAnonymous ndDdTbAfNessuna valutazione finora
- Tav 8Documento1 paginaTav 8Gaetano CironeNessuna valutazione finora
- Rivista Adr Noi - Mese Di OttobreDocumento8 pagineRivista Adr Noi - Mese Di OttobreNadiaNessuna valutazione finora
- Atterrare Meglio PDFDocumento99 pagineAtterrare Meglio PDFTheGrill FirenzeNessuna valutazione finora
- B Computo PISTA CICLABILE VERDE INTERNODocumento2 pagineB Computo PISTA CICLABILE VERDE INTERNOCiro AscioneNessuna valutazione finora
- Manuale Ford FiestaDocumento290 pagineManuale Ford FiestaIvano Verbi100% (1)