Potrebbero piacerti anche
- Dispensa MetallurgiaDocumento177 pagineDispensa Metallurgiagioscorza2Nessuna valutazione finora
- Linea ElasticaDocumento180 pagineLinea ElasticaMarco LeonoriNessuna valutazione finora
- Progetto Di Piastre StrisceDocumento14 pagineProgetto Di Piastre StrisceAndrea InfusoNessuna valutazione finora
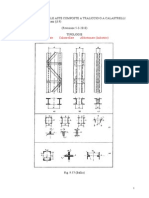
- Lezione16 Aste ComposteDocumento18 pagineLezione16 Aste ComposteAndreaMercuriNessuna valutazione finora
- Travi CurveDocumento4 pagineTravi CurvePippo FrancoNessuna valutazione finora
- Analisi Pushover Tridimensionali Di Strutture in C.A. Irregolari in Pianta - Ing. Mattia MignardiDocumento156 pagineAnalisi Pushover Tridimensionali Di Strutture in C.A. Irregolari in Pianta - Ing. Mattia MignardiIng. Maurizio Serpieri100% (1)
- Meccanica Dei SolidiDocumento250 pagineMeccanica Dei SolidiMarco SangiorgioNessuna valutazione finora
- Esercizi di fisica: ottica e elettromagnetismoDa EverandEsercizi di fisica: ottica e elettromagnetismoValutazione: 5 su 5 stelle5/5 (1)
- 04 Dispense OndeDocumento37 pagine04 Dispense OndeMassimilianoTerenziNessuna valutazione finora
- Propagazione OndeDocumento32 paginePropagazione OndeAle85toNessuna valutazione finora
- 06-Tensioni Nelle Travi V1-6Documento33 pagine06-Tensioni Nelle Travi V1-6Alessandro Riposi100% (1)
- GasdinamicaDocumento82 pagineGasdinamicazeus8484100% (1)
- Esercizio 2 InstabilitàDocumento31 pagineEsercizio 2 InstabilitàMarco Raneo PezzanoNessuna valutazione finora
- Costruzioni Di AcciaioDocumento28 pagineCostruzioni Di AcciaioMario MereniNessuna valutazione finora
- Prontuario Scienze Delle CostruzioniDocumento9 pagineProntuario Scienze Delle CostruzioniGiulio PalamàNessuna valutazione finora
- Bending of BeamsDocumento27 pagineBending of Beamsgabrielitos7891Nessuna valutazione finora
- L'equazione Differenziale Della Linea ElasticaDocumento11 pagineL'equazione Differenziale Della Linea ElasticaPaolo BirattaNessuna valutazione finora
- Linea ElasticaDocumento12 pagineLinea ElasticaVirgilio TinariNessuna valutazione finora
- La Deformazione Elastica Delle TraviDocumento44 pagineLa Deformazione Elastica Delle TraviAdrian Seidelman100% (1)
- Il Problema Di Saint Venant (B)Documento13 pagineIl Problema Di Saint Venant (B)Christos TsaropoulosNessuna valutazione finora
- 09 Pendii TaylorDocumento25 pagine09 Pendii TaylorGianluca FontanaNessuna valutazione finora
- Piastre PDFDocumento43 paginePiastre PDFroccia1989Nessuna valutazione finora
- 06-Tensioni Nelle Travi V1-6Documento33 pagine06-Tensioni Nelle Travi V1-6staedtlerpNessuna valutazione finora
- Comp M2Documento33 pagineComp M2marcoNessuna valutazione finora
- 02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Documento11 pagine02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Armando Di ChiaraNessuna valutazione finora
- Risoluzione Del Problema Di de Saint Venant PDFDocumento6 pagineRisoluzione Del Problema Di de Saint Venant PDFAndreaAlberoNessuna valutazione finora
- Flessione Plus Geometria Aree Ver 11 CompressedDocumento59 pagineFlessione Plus Geometria Aree Ver 11 CompressedimphudaNessuna valutazione finora
- SDC 03 Rev3Documento37 pagineSDC 03 Rev3salvo2miceliNessuna valutazione finora
- Flessione RettaDocumento57 pagineFlessione RettaDavide MaranoNessuna valutazione finora
- Torsi OneDocumento6 pagineTorsi OneMary Joyce AlvarezNessuna valutazione finora
- Il Campo RotanteDocumento20 pagineIl Campo RotanteAndreaRaviolaNessuna valutazione finora
- Lastre PianeDocumento43 pagineLastre PianeandreahankNessuna valutazione finora
- Lastre Piane TDC LMDocumento28 pagineLastre Piane TDC LMteocomiNessuna valutazione finora
- Statica Travi e Fili PDFDocumento41 pagineStatica Travi e Fili PDFleluz__Nessuna valutazione finora
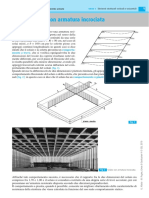
- Solai Solette Armatura Incrociata PDFDocumento10 pagineSolai Solette Armatura Incrociata PDFAleksiey PellicciaNessuna valutazione finora
- Peli LiberiDocumento62 paginePeli LiberiElton MirakaNessuna valutazione finora
- Lezione 04 PDFDocumento8 pagineLezione 04 PDFBianca MansiNessuna valutazione finora
- Cap EstensimetriDocumento7 pagineCap EstensimetriArmando_84Nessuna valutazione finora
- Campi Scalari e VettorialiDocumento3 pagineCampi Scalari e Vettorialimandrake1985Nessuna valutazione finora
- Generalità Sui GanciDocumento8 pagineGeneralità Sui Gancialigi33Nessuna valutazione finora
- Flessione Progetto VerificaDocumento12 pagineFlessione Progetto VerificaAntonello SerratoreNessuna valutazione finora
- Equazioni Di MaxwellDocumento19 pagineEquazioni Di MaxwellRiflessologia PlantareNessuna valutazione finora
- Dispense Meccanica Delle StruttureDocumento43 pagineDispense Meccanica Delle StruttureFrancesca SartiniNessuna valutazione finora
- Macchine Elettriche 3Documento12 pagineMacchine Elettriche 3Anonymous f3iGLjxNessuna valutazione finora
- 03-Carichi DistribuitiDocumento3 pagine03-Carichi DistribuitiGra MaNessuna valutazione finora
- Appunti Taglio Nel C.A. - Prof. de LucaDocumento30 pagineAppunti Taglio Nel C.A. - Prof. de LucaSergio grilloNessuna valutazione finora
- Geometria Delle AreeDocumento13 pagineGeometria Delle AreeFederica MililloNessuna valutazione finora
- LEZIONE 4 - Local EffectDocumento24 pagineLEZIONE 4 - Local EffectLuca Dal MolinNessuna valutazione finora
- 4 Geometria Delle MasseDocumento20 pagine4 Geometria Delle MasseFederica MililloNessuna valutazione finora
- Cilindri in PressioneDocumento14 pagineCilindri in PressioneMaurizio La VillettaNessuna valutazione finora
- Risposte Alle DomandeDocumento6 pagineRisposte Alle Domandechiara chiaraNessuna valutazione finora
- Rpartizione Carichi SismiciDocumento11 pagineRpartizione Carichi SismiciAnonymous jG19GTAh8Nessuna valutazione finora
- DocPlinto A BicchiereDocumento8 pagineDocPlinto A Bicchierepietro.corradiniNessuna valutazione finora
- Linea Elastica Flessionale - TecnoLogicaDocumento1 paginaLinea Elastica Flessionale - TecnoLogicaTrinchettoNessuna valutazione finora
- 5b Lezione Sollecitazioni Semplici TosioneDocumento26 pagine5b Lezione Sollecitazioni Semplici TosioneSara ZaherNessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- Omografia: Omografia: trasformazioni nella visione artificialeDa EverandOmografia: Omografia: trasformazioni nella visione artificialeNessuna valutazione finora
- Trasformazione affine: Sbloccare le prospettive visive: esplorare la trasformazione affine nella visione artificialeDa EverandTrasformazione affine: Sbloccare le prospettive visive: esplorare la trasformazione affine nella visione artificialeNessuna valutazione finora
- Catalogo Vite-MadreviteDocumento38 pagineCatalogo Vite-MadreviteLeo NardoNessuna valutazione finora
- Tesi BallaratiDocumento39 pagineTesi BallaratiVisitOn.T.witte.rNessuna valutazione finora
- Industrie Manufatti Cementizi N. 4 Del 2008Documento108 pagineIndustrie Manufatti Cementizi N. 4 Del 2008Giuseppe GentileNessuna valutazione finora
- Trave Jawert Metodo CalcoloDocumento14 pagineTrave Jawert Metodo CalcoloPippo FrancoNessuna valutazione finora
- Q Katalog ItalienischDocumento52 pagineQ Katalog ItalienischAlessandro CamozzatoNessuna valutazione finora
- Il Legame Costitutivo ElasticoDocumento19 pagineIl Legame Costitutivo ElasticoFrancesco CrudoNessuna valutazione finora
- TennisDocumento20 pagineTennisLone RedstarNessuna valutazione finora
- Viscosita Viscoelasticita ReometriaDocumento60 pagineViscosita Viscoelasticita ReometriaAleNessuna valutazione finora
- 2 Comport Amen To Statico Delle GallerieDocumento15 pagine2 Comport Amen To Statico Delle GallerieCris Mina VaganteNessuna valutazione finora
- Unict 6611Documento5 pagineUnict 6611Leotta GianfrancoNessuna valutazione finora
- 4 Analisi Pushover PDFDocumento59 pagine4 Analisi Pushover PDFdelzotto81Nessuna valutazione finora
- Jet GroutingDocumento36 pagineJet GroutingAndrea SteriNessuna valutazione finora
- 11-Inflessioni Delle Travi V1-1Documento30 pagine11-Inflessioni Delle Travi V1-1Ma RcoNessuna valutazione finora
- Cigada Comportamento Meccanico Dei MaterialiDocumento128 pagineCigada Comportamento Meccanico Dei Materialialessio_paluello0% (1)
- Lezione 1 - Introduzione. Le PiastreDocumento35 pagineLezione 1 - Introduzione. Le Piastreq_giovanniNessuna valutazione finora
- 2 - UD2b - Riduzione e Ingrandimento Di DisegniDocumento19 pagine2 - UD2b - Riduzione e Ingrandimento Di DisegniLiborio ScavoneNessuna valutazione finora
- 1-Sismicad IntroduzioneDocumento26 pagine1-Sismicad IntroduzioneLallaGervasiNessuna valutazione finora
- GeotecnicaDocumento12 pagineGeotecnicaHy Vong0% (1)
- Tensioni ResidueDocumento7 pagineTensioni ResidueUmberto Slurm McKenzie RosiNessuna valutazione finora
- Dilatazione TermicaDocumento14 pagineDilatazione TermicaIl Conte CamiNessuna valutazione finora
- Brochure GeogriglieDocumento21 pagineBrochure Geogrigliemassimiliano nartNessuna valutazione finora
- Schiacciamento MasselloDocumento11 pagineSchiacciamento Massellogmazzeo87Nessuna valutazione finora
- Docslide - It - Analisi Della Deformazione PDFDocumento32 pagineDocslide - It - Analisi Della Deformazione PDFAndrea PrannoNessuna valutazione finora
- Meccanica Computazionale Delle StruttureDocumento37 pagineMeccanica Computazionale Delle StruttureOmar STNessuna valutazione finora