Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Tesi
Caricato da
rockerrabbitCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Tesi
Caricato da
rockerrabbitCopyright:
Formati disponibili
Prefazione
Il cervello costituisce sicuramente uno degli organi pi affascinanti e
misteriosi del corpo umano. Oltre ad essere il principale centro di controllo di
tutto il corpo, sede di tutti quegli aspetti che contraddistinguono la nostra
specie: il pensiero ed i sentimenti. E quindi naturale che la sua natura abbia
attratto su di se molti studi scientifici. Inizialmente lo studio del cervello
avveniva chirurgicamente. Con lavvento della tomografia computerizzata divenne
possibile esplorare il corpo umano, e quindi anche la testa, senza dover
ricorrere alla chirurgia. Successivamente, attraverso il primo importante passo
effettuato attraverso la tomografia ad emissione di positroni (PET), inserendo
quindi la sorgente allinterno del soggetto, stato possibile ottenere, oltre
ad una migliore localizzazione, lacquisizione di immagini anche del flusso
sanguigno e seguire il metabolismo attraverso una tecnica relativamente non
invasiva (seppure utilizzante isotopi radioattivi). Successivamente fu messa a
punto unaltra tecnica, che permetteva di ottenere immagini migliori ma in
maniera assolutamente non invasiva (senza lutilizzo di alcun isotopo
radioattivo): la tomografia a risonanza magnetica. Questa tecnica si basa sul
fenomeno della risonanza magnetica nucleare e permette di ottenere immagini di
tutto il corpo e di distinguere, in immagini del cervello, la materia bianca
dalla materia grigia. I successivi aumenti della velocit di acquisizione e lo
sviluppo di appositi mezzi di contrasto permisero lapplicazione della risonanza
magnetica per valutazioni funzionali facendo nascere cos quella tecnica che
prende il nome di risonanza magnetica funzionale. Tuttavia, non pass molto
tempo prima che gli studiosi si accorsero che la stessa emoglobina poteva essere
utilizzata come agente di contrasto naturale.
Lo scopo di questa tesi quello di illustrare i fenomeni ed i
procedimenti necessari per effettuare questo tipo di analisi.
Nel primo capitolo verranno esposti i fenomeni fisici e chimici alla base
innanzitutto della risonanza magnetica, e successivamente della risonanza
magnetica funzionale, illustrando anche le procedure coinvolte negli esperimenti
e facendo un raffronto con altre tecniche.
Nel secondo capitolo vengono trattati, con maggiore dettaglio, i meccanismi che
1
permettono lacquisizione di immagini attraverso una prima e fondamentale
panoramica sulle sequenze di impulsi pi semplici, ed una successiva trattazione
di quelle pi evolute. Inoltre vengono illustrate tutte quelle correzioni che
permettono di rimuovere gli artefatti, o pi banalmente gli errori,
nellimmagine.
Nel terzo capitolo viene affrontata la parte pi strettamente computazionale in
cui i dati acquisiti costituiscono linput per un software che genera immagini
in cui vengono evidenziate le zone attive. Lo scopo di questo capitolo quindi
quello di analizzare gli strumenti matematici che permettono questo tipo di
identificazione.
Nellultimo capitolo viene ipotizzato un tipo di esperimento applicabile alla
funzione motoria, e rappresenta solo un modo per evidenziare tutte quelle
problematiche e specifiche di progetto utili per una buona riuscita
dellanalisi.
2
Basi fisiche della risonanza magnetica
funzionale
Propriet magnetiche della materia
I meccanismi coinvolti nella tomografia a risonanza magnetica si basano su
di una propriet comune a tutti i sistemi microfisici, descrivibili attraverso
le leggi della meccanica quantistica, denominata spin che, per semplicit, viene
normalmente ricondotto al momento angolare di un sistema macroscopico rotante.
In modo analogo ad altre grandezze misurabili proprie dei sistemi microfisici,
lo spin quantizzato, pu assumere cio solo uninfinit numerabile di valori
discreti e, indicando con I il suo modulo, lelemento che questo caratterizza
pu essere osservato in 2I+1 stati diversi. Questo significa che un nucleo
avente I=1/2 pu essere osservato in due stati differenti denominati
normalmente, seguendo la regola della mano destra, rotazione destrorsa se lo
spin rivolto verso lalto, nel sistema di riferimento scelto, o sinistrorsa se
rivolto verso il basso.
Rotazione destrorsa Rotazione sinistrorsa
Conseguenza diretta di questa rotazione, e della distribuzione di carica
contenuta nei nuclei, quella di potere ad essi associare un momento di dipolo
magnetico legato vettorialmente allo spin attraverso la relazione di
proporzionalit:
j=
I
dove la costante di proporzionalit prende il nome di rapporto giromagnetico e
3
dipende dal nucleo considerato. Pi intuitivamente, questi si comportano come
minuscoli aghi magnetici che, se non sottoposti a forze magnetiche esterne, sono
diretti casualmente nello spazio. Supponendo ora di applicare un campo
magnetostatico a questo sistema, la prima conseguenza quella di provocare un
orientamento degli spin lungo le linee di forza del campo magnetico,
suddividendo i nuclei in due sottopopolazioni, quella avente spin con verso
concorde con il campo e quella avente spin discorde. A temperatura ambiente, la
prima delle due popolazioni pi numerosa, essendo caratterizzata da una minore
energia potenziale. La differenza, seppur minima, comunque tale da poter
identificare un vettore di magnetizzazione macroscopica misurabile.
In realt gli spin non sono perfettamente allineati ma eseguono un moto di
precessione attorno alle linee del campo, quindi i nuclei si muovono in modo
tale che il loro asse di rotazione descriva un cono avente per asse proprio le
linee del campo esterno, moto analogo a quello di una trottola nella sua fase di
arresto, quando questa sottoposta alla forza di gravit.
Moto di precessione di Larmor
Unimportante caratteristica di questo moto di avere velocit angolare
che gode di una relazione di proporzionalit simile a quella gi vista per il
momento di dipolo magnetico:
o=
B
0
dove il vettore B0 indica il campo magnetostatico esterno. A questa velocit
angolare corrisponde una frequenza che prende il nome di frequenza di Larmor e
il moto che questa caratterizza prende il nome di precessione di Larmor.
Cos come il nucleo anche gli elettroni possiedono uno spin ma di pari
importanza per le applicazioni funzionali della risonanza magnetica il loro
moto orbitale attorno al nucleo generante anchesso un momento magnetico che
contribuisce a quello totale dellatomo. Il momento magnetico totale dellatomo
comunque determinato dallaccoppiamento fra spin nucleare, spin elettronico e
4
spin elettronico orbitale. Inserendo allora una sostanza allinterno di un campo
magnetico, questa esibisce comportamenti diversi a seconda che i suoi atomi
abbiano o meno un momento magnetico intrinseco.
Analizzando prima le sostanze che non hanno un momento magnetico
intrinseco, riferendosi per semplicit ad un solo elettrone che percorre
unorbita circolare, leffetto sortito dal campo magnetico esterno quello di
aumentare il raggio della traiettoria se il momento angolare orbitale
dellelettrone vettorialmente opposto al campo e di diminuirlo nella
condizione opposta. Leffetto rimane comunque sempre lo stesso: la variazione
del momento magnetico dellatomo si oppone al campo che lha generata. Una
sostanza che esibisce questo comportamento viene detta diamagnetica per la sua
capacit di ridurre il campo magnetico in cui viene inserita e normalmente
caratterizzata da un numero pari di elettroni e strutture orbitali elettroniche
simmetriche.
Variazione del moto degli elettroni dellatomo di idrogeno a causa del campo
magnetostatico. Laffetto sempre la diminuzione del campo totale.
Se gli atomi hanno invece un momento magnetico diverso da zero, la loro tendenza
quella di allineare questo vettore con le linee di forza del campo,
provocandone un leggero aumento. Le tecniche di risonanza magnetica funzionale
si basano proprio sulla capacit di discriminazione fra aree contenenti sostanze
paramagnetiche e sostanze diamagnetiche.
Meccanismo fisico generante il segnale di risonanza
magnetica
Il segnale di risonanza magnetica di normale uso clinico deriva quasi
esclusivamente dai protoni dellacqua contenuta nei tessuti e le immagini che ne
derivano rappresentano, in prima approssimazione, immagini di densit protonica.
Dopo aver introdotto loggetto dellanalisi allinterno di un campo
magnetico esterno possibile provocare, attraverso un impulso a radiofrequenza,
5
un aumento dellangolo di nutazione dei nuclei, cio langolo che lo spin forma
con le linee del campo provocando un aumento della componente trasversale del
vettore magnetizzazione macroscopica. Alla cessazione dellimpulso, la
magnetizzazione macroscopica riprende la sua direzione originaria molto
lentamente, in un intervallo temporale che pu variare da alcuni decimi di
secondo fino ad alcuni secondi. In questo intervallo possibile acquisire,
attraverso una bobina che funge da ricevitore donda, un segnale in tensione che
rappresenta il segnale di risonanza magnetica. Data la geometria del sistema, la
grandezza realmente misurabile, cio quella che induce tensione nella bobina di
ricezione, la sola componente trasversale, quindi volendo misurare la
magnetizzazione longitudinale, deve essere portata sul piano trasverso.
Laspetto importante che rende questo fenomeno utilizzabile nella pratica
clinica sta nel fatto che tutto ci si verifica solo se la frequenza
dellimpulso pari a quella di precessione dei nuclei mentre, se la frequenza
diversa, non vi alcuna risposta.
Le condizioni iniziali vengono ristabilite, con andamento esponenziale,
alla cessazione dellimpulso, secondo due costanti di tempo fondamentali. La
prima di queste viene detta tempo di rilassamento spin-reticolo ed una misura
del tempo necessario a ristabilire la componente longitudinale del vettore
magnetizzazione:
Un immagine pesata su questo parametro pu essere ottenuta, in prima analisi,
attraverso un impulso che annulli la componente longitudinale, portando il
vettore magnetizzazione sul piano trasverso, e osservando come viene
recuperata.
Mentre la componente longitudinale della magnetizzazione riprende il suo
valore iniziale, si assiste ad una concomitante attenuazione della componente
trasversale con una costante di tempo che prende il nome di tempo di
rilassamento spin-spin
Tuttavia, date le disomogeneit locali del campo magnetico dovuto allambiente
6
M
z
=M
0
(1e
1
T
1
)
M
xy
=M
0
( e
t
T
2
)
molecolare circostante, non si riuscir ad ottenere una perfetta coerenza degli
spin e quindi la componente trasversale si attenuer pi velocemente secondo una
costante di tempo T2* legata alla precedente dalla formula:
dove B0 rappresenta la variazione locale del campo.
Lo sviluppo della risonanza magnetica funzionale
Inizialmente il decadimento del segnale associato alle discontinuit del
campo magnetico veniva considerato come un disturbo e venivano applicati impulsi
in radiofrequenza che attenuassero gli effetti di questo processo.
Tuttavia successivamente si comprese che, essendo queste fluttuazioni generate
anche dalla presenza di sostanze paramagnetiche, questo fenomeno poteva essere
sfruttato per localizzare sostanze con tali caratteristiche, potevano cio
essere impiegate come mezzo di contrasto. Si inizi quindi ad utilizzarle per
analizzare le variazioni locali del flusso sanguigno associate allattivazione
delle aree del cervello. Dopo un primo periodo di sperimentazione sugli animali
si inizi ad applicarla anche sulluomo.
Successivamente, allinizio degli anni novanta, si osserv che, per
evidenziare le zone del cervello attive, non era necessario alcun mezzo di
contrasto infatti la desossiemoglobina, essendo una sostanza paramagnetica,
poteva essere considerata come agente di contrasto naturale. Variazioni
dellattivit cerebrale provocano unalterazione dellossigenazione del sangue
sufficiente a modificare il segnale generato dalle zone di attivazione. Questo
tipo di tecnica viene denominata BOLD, dallacronimo di <<Blood Oxygenation
Level Dependent contrast>> ed la tecnica considerata in questa tesi.
Aspetti fisici della tecnica BOLD
Nellemoglobina deossigenata il ferro delleme nello stato ferroso a
rotazione destrorsa, avente quattro dei sei elettroni pi esterni spaiati. Gli
spin di questi elettroni possiedono un momento magnetico molto grande tale da
attribuire alla desossiemoglobina propriet paramagnetiche paragonabili a quelle
7
1
T
2
=AB
0
+
1
T
2
dei mezzi di contrasto esterni.
Nellemoglobina ossigenata invece, uno degli elettroni spaiati viene
trasferito alla molecola di ossigeno ed il ferro cambia il suo stato e passa
alla rotazione sinistrorsa perdendo le sue propriet paramagnetiche.
La presenza di desossiemoglobina nel sangue genera allora differenze del
campo magnetico fra i vasi sanguigni e i tessuti circostanti che porta ad uno
sfasamento degli spin e ad una diminuzione di T2* (la componente trasversale
della magnetizzazione decade pi velocemente) rispetto alle situazioni in cui la
sua concentrazione minore. Questo effetto coinvolge una regione che si estende
per circa due volte il raggio del vaso. In un immagine pesata T
2
* la presenza di
sostanze paramagnetiche, come la desossiemoglobina, comporta loscuramento della
regione interessata.
Consideriamo ora lattivazione di unarea del cervello. Questo evento
accompagnato da un aumento del consumo di ossigeno da parte delle cellule
cerebrali che, in prima analisi, porta ad un analogo aumento della
concentrazione di desossiemoglobina. Tuttavia il consumo di ossigeno sempre
accompagnato ad una vasodilatazione locale che aumenta lapporto di
ossiemoglobina in maniera molto superiore rispetto allaumento del fabbisogno,
che porta quindi allincremento netto della concentrazione di questultima.
Variazione dellossigenazione fra lo stato attivato e lo stato di riposo
8
Questi cambiamenti vengono registrati dalla bobina a radiofrequenza e le regioni
che hanno aumentato la loro attivit vengono presentate come pi brillanti
rispetto alle zone inattive. La risonanza magnetica funzionale si limita quindi
a studi riguardanti lattivazione cerebrale che effettua con uneccellente
risoluzione spaziale, dellordine dei 3 millimetri.
Descrizione anatomica e funzionale del cervello
Assi e piani anatomici del cervello
Per descrivere efficacemente lanatomia del cervello vengono utilizzati dei
riferimenti geometrici definiti in base ad alcuni punti di repere anatomico.
Esistono principalmente due assi, la cui conformazione pi facilmente
descrivibile se ci riferisce ad un topo, cio con la spina dorsale orizzontale
piuttosto che verticale. In questo caso lasse rostro-caudale percorre il corpo
dal naso alla coda, mentre quello dorso-ventrale giace perpendicolarmente al
primo. Applicando questo sistema di assi alluomo questi si diversificano a
seconda della loro collocazione:
nell'encefalo lasse rostro-caudale passa per il lobo frontale e quello
occipitale
nel midollo spinale l'asse rostro-caudale costituisce l'asse del midollo
stesso
L'asse dorso-ventrale sempre perpendicolare al primo.
La scissura interemisferica attraversa il cervello nel suo centro
separandone la met sinistra da quella destra. Se rispetto a questasse due
strutture si trovano dalla stessa parte vengono definite ipsilaterali e
collaterali altrimenti. Inoltre, le strutture pi vicine alla linea mediana
vengono definite mediali mentre quelle pi lontane sono chiamate laterali.
Sono definiti infine tre piani: il piano trasversale, che divide il
cervello in una met superiore e in una inferiore, il piano coronale, che lo
divide in una met frontale ed in una anteriore, e il piano sagittale che lo
divide in met destra e sinistra.
9
Anatomia del cervello
L'encefalo costituito da tre aree: il
cervello, il tronco encefalico ed il
cervelletto. A sua volta il cervello
costituito da diencefalo, che regola
parametri come la temperatura e la
crescita, e telencefalo mentre il
tronco encefalico, continuazione del
midollo spinale, costituito dal
mesencefalo, che integra le funzioni
motorie con quelle sensoriali, il
ponte, che svolge una funzione di
raccolta e trasferimento delle funzioni
motorie fra la corteccia e il
cervelletto, ed il bulbo (o medulla), Encefalo
che costituisce il centro di controllo delle funzioni vitali.
Esistono poi anche due strutture inter-emisferiche che sono il corpo calloso e
il fornice.
Analizzando con maggiore dettaglio il
telencefalo, questo costituito da
diverse strutture:
la corteccia cerebrale, spessa
dai due ai quattro millimetri e
costituita da materia grigia,
cio corpi cellulari e piccole
fibre
la materia bianca costituita da
fibre di trasmissione mieliniche
alle quali la mielina conferisce
candore
i gangli della base Anatomia del cervello
l'amigdala a cui imputata la gestione delle emozioni, il comportamento
sociale, la percezione della paura e la classificazione delle esperienze
in positive o negative.
l'ippocampo che conserva la memoria a lungo termine, regola l'orientamento
e la navigazione in uno spazio.
Per quanto riguarda il diencefalo, questo formato da due strutture: il talamo
e l'ipotalamo. Il talamo la principale stazione di smistamento delle
informazioni sensoriali (olfatto escluso) dove vengono raccolte ed inviate alla
10
corteccia per l'elaborazione. L'ipotalamo invece controlla le secrezioni della
ghiandola pituitaria che regola la sensazione della fame e della sete, la
temperatura corporea ed i ritmi veglia-sonno.
Il cervelletto invece controlla il sistema muscolare volontario e
contribuisce a creare un movimento coordinato.
La corteccia cerebrale
I quattro lobi del cervello
La corteccia cerebrale costituita
da solchi e giri (o promontori) in
modo da aumentarne la superficie,
caratteristica discriminante fra le
varie razze animali. Strutturalmente
la corteccia pu essere suddivisa in
quattro lobi che prendono il nome
delle ossa che le ricoprono e
vengono chiamati frontale (deputato
alla pianificazione), parietale
(propricezione), occipitale
(visione) e temporale (svolge
l'elaborazione pi astratta, attribuisce un nome alle cose e comprende anche le
aree di Broca e di Wernicke per la comprensione e l'elaborazione del linguaggio)
I lobi cerebrali sono suddivisi da quattro solchi o scissure:
il solco centrale divide il lobo parietale da quello frontale
il solco laterale separa il lobo temporale da quello frontale e quello
parietale
la scissura parieto-occipitale divide il lobo occipitale da quello
parietale
la scissura pre-occipitale divide il lobo occipitale da quello temporale
Le aree della corteccia
Le aree della corteccia cerebrale sono
dedicate all'elaborazione delle
informazioni sensoriali e dei comandi
motori. Ogni area ha dimensioni
proporzionali all'innervazione periferica
associata e viene suddivisa in tre livelli
(primaria, secondaria e terziaria) a
seconda della vicinanza al midollo. Da ci
si deduce che la corteccia primaria,
essendo la pi vicina al midollo, sempre
coinvolta
dal segnale. Le aree di ordine superiore al primo invece possono mandare
11
informazioni alle altre per l'integrazione degli stimoli e per elaborare la
risposta pi appropriata. Mentre le aree sensoriali vengono attraversate dal
segnale partendo dal primo ordine e arrivando al terzo, nelle aree motorie,
dovendo generare il segnale, l'ordine di attraversamento viene invertito e le
aree di ordine superiore al primo generano solo i movimenti pi complessi.
La corteccia visuale primaria collocata nel lobo occipitale e si occupa
della ricezione e dellinterpretazione della vista. Pi in dettaglio, il segnale
dalla retina percorre il tratto ottico, che si incrocia nel chiasmo ottico,
quindi la parte destra del campo visivo viene recepita dallemisfero sinistro e
viceversa. Un discorso del tutto analogo valido per i segnali uditivi e quelli
tattili.
La corteccia uditiva primaria collocata nel lobo temporale mentre i
segnali provenienti dai meccanocettori raggiungono la corteccia somatosensoriale
nel lobo parietale, appena dietro il solco centrale.
Gusto e olfatto vengono mediati da due apposite aree: il sistema
olfattivo posto nella superficie inferiore del lobo frontale e quello gustativo
nel lobo temporale.
Lorganizzazione della corteccia somatosensoriale assomiglia ad una mappa
della superficie del corpo, in maggior parte adibita alle mani e alla faccia,
mentre parti non strettamente coinvolte nella funzione tattile come le gambe
hanno regioni meno ampie in questa corteccia. Un discorso analogo valido per
la corteccia motoria, in cui larea maggiore collegata alle mani a causa della
complessit dei movimenti che queste possono svolgere.
universalmente noto che un emisfero cerebrale governa la parte opposta
del corpo e quindi deve esistere, in un qualche punto, un meccanismo di
inversione che viene normalmente chiamato decussazione. Tale fenomeno avviene,
per quanto concerne le vie afferenti, a livello del bulbo per poi essere inviato
al talamo che lo indirizza alla corteccia sensoriale di competenza. Anche i
segnali motori, generati dalla corteccia motoria, subiscono la decussazione a
livello del bulbo per poi accoppiarsi, al livello spinale voluto, con la radice
ventrale
Esiste anche un'altra suddivisione delle
aree dell'encefalo in base alla sua
evoluzione, infatti nel processo
evolutivo, piuttosto che sostituire
parti se ne sono viste aggiungere di
nuove. Abbiamo allora quattro parti:
il tronco encefalico che quella
pi antica dedicata alla
regolazione non cosciente delle
funzioni vitali
12
il diencefalo che, come visto, contiene talamo e ipotalamo
sistema limbico a cui, almeno in parte, vengono deputate le funzioni della
vita emotiva
la neocorteccia
Nella suddivisione generale dell'encefalo, il cervello contiene sia il sistema
limbico che la la neocorteccia. Il sistema limbico si suddivide in varie parti:
il bulbo olfattivo, l'amigdala, l'ippocampo ed il giro del cingolo (per la
risoluzione di conflitti o dubbi).
Procedura di esecuzione degli esperimenti con la fMRI
Lesecuzione di esperimenti in risonanza magnetica funzionale si basa sulla
presentazione di stimoli al soggetto che si rispecchino nellattivazione di
quelle sole aree del cervello che vogliamo andare ad investigare. E quindi
importante, per ottenere buoni risultati, effettuare una preventiva
progettazione del paradigma degli stimoli in modo da provocare lattivazione
selettiva dellarea del cervello sotto analisi.
I primi esperimenti derivavano dalla PET e quindi venivano acquisite una
serie di immagini in condizioni di riposo (di inattivit) come riferimento, e
successivamente una serie di immagini in attivazione. Il primo set veniva poi
sottratto al secondo per evidenziare le differenze. Tuttavia, essendo il decorso
delleffetto BOLD molto rapido, ed avendo questa tecnica una risoluzione
temporale elevata, possibile studiare eventi brevi che si verificano pi
frequentemente. Il paradigma pi ricorrente quello ad epoche in cui sono
presenti, in maniera ben distinta, una fase di attivazione ed una fase di
riposo. La durata di ogni singola epoca viene scelta abbastanza lunga da far si
che lemodinamica si assesti in uno stato costante, generalmente almeno 8
secondi. E necessario tuttavia cercare un compromesso fra la durata
dellesperimento ed il numero di acquisizioni da effettuare in quanto un numero
alto di queste ultime permette un maggior rapporto segnale-rumore ma una durata
eccessiva porta nel soggetto la necessit di muoversi e quindi lintroduzione di
artefatti. Inoltre il soggetto potrebbe abituarsi alla stimolazione e non avere
unattivazione sufficiente alla rilevazione del segnale BOLD. In alternativa
possibile progettare una stimolazione ad eventi, una stimolazione cio che
giunge allinterno di lunghe fasi di riposo in maniera del tutto casuale ed
13
inattesa. Questo diminuisce le possibilit di abitudine da parte del soggetto ma
comunque sottoposta alle limitazioni appena espresse. Generalmente poi questi
esperimenti hanno durata maggiore rispetto alla controparte ad epoche e sono
quindi pi complessi da gestire.
La scelta degli stimoli ha unimportanza critica in quanto devono essere
progettati in modo da ottenere una stimolazione selettiva la cui risposta non
richieda movimenti rilevanti da parte del paziente. Ad esempio, in alcuni
esperimenti richiesto al soggetto di rispondere attraverso la pressione di un
tasto che comporta, oltre allattivazione della regione motoria che pu anche
non coincidere con quella di interesse, la movimentazione del soggetto stesso.
In altri casi pi problematici, pu essere richiesto di rispondere verbalmente
allo stimo e ci comporta la movimentazione della testa che esattamente la
parte che andiamo ad analizzare.
Data la rumorosit del tomografo durante la scansione, la stimolazione
uditiva, pur non essendo proibitiva, genera comunque un segnale meno forte e
quindi maggiore incertezza dei risultati. E comunque buona norma istruire
preventivamente il paziente su come verr effettuato lesperimento.
Una volta ultimata lacquisizione si passa allanalisi dei dati. Questa
analisi si suddivide sostanzialmente in due parti: prima si analizzano le
acquisizioni attribuendo ai pixel un valore legato alla probabilit che il loro
decorso temporale sia dovuto allattivazione, successivamente ad ognuna di
queste zone si attribuisce un valore di confidenza, il valore cio della reale
probabilit che il segnale generato da questi punti sia dovuto allattivazione e
non a fenomeni casuali. Ponendo una soglia su questi valori si evidenziano quei
punti che possono essere considerati attivi con una certa probabilit.
Il modo pi semplice per eseguire lindividuazione delle zone attivate
sottrarre la media delle immagini acquisite nellepoca di riposo a quelle
riferite allepoca di attivazione. Tuttavia questa semplice metodica ha lo
svantaggio che ogni pi piccolo movimento della testa pu rispecchiarsi in un
aumento di intensit dei pixel sui bordi dellimmagine che quindi possono essere
rilevate come parti attive. Per ridurre questo effetto possibile utilizzare il
t-test di Student che riduce gli effetti degli artefatti dovuti al movimento.
14
Unimmagine in cui, ad ogni pixel associato un valore attribuito da un test
statistico, definita mappa statistica parametrica.
Altre tecniche utilizzate sono quelle di correlazione dove la risposta
allattivazione predetta in base alla conoscenza della risposta emodinamica.
Vengono quindi calcolati i coefficienti di correlazione fra ogni pixel e
landamento temporale della funzione i riferimento.
Dopo aver ottenuto queste mappe necessario visualizzarle evidenziando le
zone di attivazione stimando la possibilit che queste siano realmente attive,
come gi preannunciato. Se nota la distribuzione di probabilit di
attivazione, questa pu essere utilizzata come soglia sullimmagine, mostrando
solo quelle aree che hanno, con unalta probabilit, effettuato lattivazione.
Infine necessario considerare il problema multi-comparativo, in quanto la
probabilit che un pixel nei pressi delle aree di attivazione venga evidenziato
come attivo molto pi alta di quella relativa ad un pixel isolato.
Tutti questi argomenti e metodiche vengono sviluppate in dettaglio nel
corso di questa tesi
15
Altre tecniche di indagine funzionale del cervello
EEG: la misura del segnale elettrico cerebrale piuttosto comune, ma solo
recentemente si tentato di utilizzarla per mapparne lattivit.
Lelettroencefalogramma viene acquisito, in modo analogo
allelettrocardiogramma, con degli elettrodi posti sul cranio e
misurandone il potenziale rispetto ad un elettrodo di riferimento posto in
una regione del corpo a bassa attivit elettrica. I segnali sono
dellordine di 50 microvolt e sono quindi molto sensibili ai rumori che
possono essere provocati dal movimento degli occhi o dallattivit
muscolare. Attraverso questa tecnica sono state individuate alcune
frequenze caratteristiche dellEEG nelluomo ad esempio, quando il
soggetto rilassato, il segnale ha componenti comprese fra gli 8 e 13 Hz,
e vengono chiamate onde alfa. Quando questo in uno stato di maggiore
allerta, le componenti superano i 13Hz e vengono chiamate onde beta.
Acquisendo infine il segnale durante il sonno si sono individuati periodi
caratterizzati da onde ad alta frequenza, chiamata fase REM (Rapid Eyes
Movement sleep) che stata attribuita al sogno. Il limite principale di
questa tecnica che misura il segnale sul cranio del soggetto che non
necessariamente collegato allattivit elettrica della corteccia
sottostante. Tuttavia questa tecnica ha il vantaggio di essere piuttosto
economica e di poter essere utilizzata in situazioni in cui le altre non
possono essere utilizzate, come appunto durante il sonno.
MEG: misurando i segnali magnetici generati dallattivazione dei neuroni
possibile individuare con precisione la zona del cervello che li ha
emessi. Avendo questi campi magnetici unintensit molto bassa
(dellordine del femtoTesla) necessario utilizzare dispositivi di misura
molto sensibili denominati SQUID. Tuttavia, dato lordine di grandezza dei
campi coinvolti, il segnale acquisito pu risentire fortemente del rumore
ambientale e quindi necessario attrezzare gli ambienti in cui vengono
condotte le analisi di unopportuna schermatura. Questa tecnica ha il
vantaggio rispetto allEEG di poter individuare lorigine del segnale e di
avere una migliore risoluzione temporale rispetto alla fMRI e PET. Daltra
16
parte rimane comunque una tecnica costosa e la sua capacit di individuare
lattivit nelle zone pi profonde del cervello rimane comunque limitata.
PET: la tomografia ad emissione di positroni una tecnica di medicina
nucleare che produce immagini tridimensionali o mappe dei processi
funzionali all'interno del corpo. Viene iniettato per via endovenosa o
inalato, sottoforma di gas, nel soggetto da esaminare, un isotopo
tracciante di breve vita media, legato chimicamente in una molecola attiva
a livello metabolico. Dopo un tempo di attesa durante il quale la molecola
metabolicamente attiva (generalmente uno zucchero), raggiunge una certa
concentrazione all'interno dei tessuti organici da analizzare, il soggetto
viene posizionano nello scanner. L'isotopo decade, emettendo un positrone.
Nel raggio di pochi millimetri, il positrone si annichila con un
elettrone, producendo una coppia di fotoni emessi in direzioni opposte fra
loro. Questi vengono captati quando raggiungono uno scintillatore, nel
dispositivo di scansione che prende il nome di gamma camera, dove generano
un lampo luminoso, rilevato attraverso dei tubi fotomoltiplicatori. E
importante sottolineare che i fotoni che raggiungono lo scintillatore
vengono poi considerati solo se rilevati in coppia, se vengono cio
rilevati a distanza di pochi nanosecondi luno dallaltro. Misurando la
posizione in cui i fotoni colpiscono il rilevatore, si pu ricostruire la
posizione del corpo da cui sono stati emessi e determinare l'attivit
all'interno delle parti del corpo investigate. Lo scanner utilizza la
rilevazione delle coppie di fotoni per creare immagini, attraverso la
tecnica Filtered Back-Projection applicata anche nella TC, mappare la
densit dell'isotopo nel corpo, sotto forma di immagini di sezioni
(generalmente trasverse) separate fra loro di 5 mm circa. La mappa
risultante rappresenta i tessuti in cui la molecola campione si
maggiormente concentrata. Il problema principale legato a questa tecnica
lutilizzo di radioisotopi ed un costo molto alto ma possiede comunque
buone sensibilit e risoluzione.
SPECT: la tomografia ad emissione di fotone singolo utilizza, come la PET,
un radioisotopo emettente raggi gamma immesso nel flusso sanguigno ancora
17
per iniezione o inalazione. La radiazione emessa viene rilevata sempre con
una gamma camera che viene fatta ruotare attorno al soggetto per ottenerne
proiezioni multiple utilizzate per ottenere limmagine attraverso la
Filtered Back-Projection. Nonostante levidente analogia con la PET questa
tecnica possiede alcune evidenti differenze individuabili in un minor
costo, anche rispetto alla fMRI, e nella mancanza di una buona risoluzione
spaziale e temporale. Mantiene comunque, in analogia con la tecnica
precedente, la necessit di utilizzo di radioisotopi.
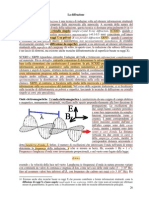
NIRS: la spettroscopia del vicino infrarosso una tecnica diagnostica non
invasiva in tempo reale, in grado di rilevare lossigenazione tissutale.
Utilizza come mezzo per la rilevazione una radiazione ottica del vicino
infrarosso che attraversa il tessuto non in linea retta, ma attraverso una
traiettoria spezzata la cui forma strettamente dipendente dal numero di
eventi di scattering subiti e si conclude con la fuoriuscita dal tessuto
dovuta in parte alla riflessione e in parte alla trasmissione. Il fotone
allinterno dei tessuti subisce due processi principali: la diffusione
(scattering) e lassorbimento, il primo dominante sul secondo in questa
banda luminosa. Lassorbimento dovuto allemoglobina che possiede uno
spettro di assorbimento diverso nei suoi due stati e quindi, andando a
misurare queste due quantit si pu calcolare la saturazione di ossigeno
nel sangue per i tessuti studiati.
Le sonde NIRS pi comuni, utilizzanti le fibre ottiche, hanno lestremit
rivelatrice dalla stessa parte di quella emettente in quanto la radiazione
segue nei tessuti definito normalmente a forma di banana. La distanza
fra queste due terminazioni di circa quattro centimetri permettendo una
profondit di esplorazione nei tessuti di tre centimetri o poco pi.
18
Acquisizione dellimmagine
e rimozione degli artefatti
Il tomografo RM
Prima di andare ad analizzare le
varie tecniche di ricostruzione
dellimmagine, opportuno
comprendere la struttura di un
tomografo attuale
per avere bene in mente la geometria
delle grandezze fisiche che andremo
ad analizzare. Il cuore del tomografo
il magnete, generante il
campo magnetostatico uniforme (valore minimo 1,5 T), storicamente pu essere
permanente, a superconduttore o un elettromagnete. Oggi la grande maggioranza
a superconduttore. Come si nota nella foto sopra, hanno struttura simile a
quella di unenorme spira circolare quindi il campo magnetico ha direzione
orizzontale. Definendo allora un terna ortogonale destrorsa sul paziente
scegliamo un asse z longitudinale, parallelo al campo, che attraversi il
paziente dalla testa ai piedi. Lasse x viene scelto in direzione medio-laterale
da destra verso sinistra e lasse y in direzione sagittale.
Terna ortogonale destrorsa di riferimento.
19
Altra parte fondamentale del tomografo il sistema a radiofrequenza che
genera gli impulsi e riceve gli echi. Anche questo sistema viene realizzato
attraverso una bobina che, nel tomografo, posizionata con il proprio asse sul
piano trasverso. Questo significa che, qualunque sia la sequenza utilizzata, per
rilevare il segnale necessario portare parte della magnetizzazione sul piano
trasverso perch la componente sul piano longitudinale non genera flusso nella
bobina e quindi non genera forza elettromotrice.
Schematizzazione del sistema di
ricetrasmissione delle radiofrequenze
Lultima parte fondamentale del tomografo il sistema di gradienti che
permette di modificare il campo statico in modo che, in fase di ricostruzione
dellimmagine sia possibile attribuire ad ogni componente del segnale ricevuto,
la posizione del voxel sorgente.
Tecnica del gradiente per la selezione dello strato
Durante lo sviluppo della risonanza magnetica sono state progettate diverse
tecniche per la selezione dei singoli elementi di volume (comunemente chiamati
voxels da volume e elements). Tuttavia la modalit che ha di fatto permesso
lutilizzo di questa tecnologia e che oggi comunemente usata prende il nome di
tecnica del gradiente e si basa sulla proporzionalit esistente fra la frequenza
di precessione dei nuclei ed il campo magnetostatico ad essi applicato.
20
Esempio di come varia il campo a causa di un gradiente G
applicato. La variazione del campo resa con una scala
di grigi, le zone pi scure rappresentano campi con
intensit maggiore.
Brevemente, sommando al campo statico applicato un campo linearmente variabile
(un gradiente appunto) in direzione longitudinale, si impone ai nuclei una
frequenza di precessione dipendente dalla loro posizione lungo questa direzione.
E possibile a questo punto selezionare uno spessore grande a piacere attraverso
un impulso avente una banda tale da eccitare solo questo spessore. I contributi
possono poi essere differenziati in frequenza attraverso la trasformata di
Fourier. Per evitare sovrapposizioni fra strati adiacenti (interferenza di
crosstalk) necessario utilizzare impulsi aventi spettro in frequenza con il
profilo pi ripido possibile. La forma donda che meglio si addice a questo
scopo quindi la funzione Sinc (utilizzata normalmente a cinque lobi) avente
spettro approssimativamente rettangolare.
Andamento della funzione Sinc nel dominio del tempo e delle frequenze
21
Sequenze di impulsi elementari lacquisizione del segnale
Per definire in maniera compiuta la modalit di applicazione degli impulsi
vengono introdotti tre tempi caratteristici per una sequenza: il tempo di
interpulso TI definito come la distanza temporale fra due impulsi della stessa
sequenza, il tempo di eco TE cio il tempo fra limpulso ed il segnale di
risonanza da misurare e infine il tempo di ripetizione TR cio il tempo fra
unapplicazione della sequenza e la successiva. variando questi tre parametri si
ottengono immagini e segnali dipendenti da una o dallaltra caratteristica della
risposta (cio dei tempi di decadimento)
Analizziamo ora le quattro sequenze fondamentali per la compressione dei
prossimi argomenti:
Free Induction Decay: costituita da un solo impulso che fa compiere al vettore
magnetizzazione una rotazione di 90 portandola sul piano trasverso
permettendo di rilevare il segnale una volta stabilita la coerenza di
fase. Non viene utilizzata per motivi strumentali che rendono difficile la
rilevazione del segnale di risonanza generato. Possiamo comunque dire che
molte sequenze si basano su questa.
Sequenza FID e rispettivo moto del vettore magnetizzazione
22
Spin Echo: si applica un impulso che porta la magnetizzazione sul piano
trasversale ma il conseguente segnale non viene rilevato. Dopo un tempo TI
viene inviato un impulso di rifocalizzazione a 180 che ribalta la
magnetizzazione trasversale e che genera leco da rilevare dopo un tempo
TE=2TI. Lampiezza di questo eco comunque inferiore a quella del segnale
FID in quanto parte della magnetizzazione longitudinale gi stata
recuperata.
Sequenza Spin-echo e rispettivo moto degli spin nucleari
Gradient Echo: Un primo impulso di eccitazione genera la componente trasversale
della magnetizzazione. Successivamente viene applicato un
gradiente nella direzione di lettura che provoca unaccelerazione nello
sfasamento degli spin e quindi un decadimento pi veloce del segnale FID.
Una volta distrutta completamente la coerenza di fase questa viene recuperata
invertendo il gradiente di sfasamento in modo da rallentare gli spin in anticipo
e accelerare quelli in ritardo in modo da permettendo la generazione delleco.
23
Sequenza Gradient echo e rispettivo moto degli spin nucleari
Inversion Recovery: Il vettore magnetizzazione viene ruotato di 180
rimanendo ancora longitudinale ma avente verso opposto. Cessato limpulso
tender a tornare nel suo stato iniziale. Se a questo punto, durante il
tempo di rilassamento spin-reticolo, viene inviato un impulso a 90, la
magnetizzazione longitudinale residua diventa trasversale e quindi rilevabile
dallantenna.
Sequenza Inversion
Recovery e corrispondente
moto del vettore
magnetizzazione
24
Il k-spazio
Introduciamo ora il formalismo matematico del k-spazio utilizzato normalmente
per la ricostruzione dellimmagine a partire dai segnali acquisiti. Con questo
formalismo si dimostra che il segnale di risonanza demodulato S(t) generato
dagli spin con frequenza di precessione imposta dal gradiente di selezione G
uguale alla trasformata di Fourier della densit degli spin emittenti.
Considerando limmagine a
sinistra come unimmagine di
densit protonica,
limmagine e destra ne
rappresenta il kspazio, cio
la sua trasformata di
Fourier
dove k ed r sono variabili coniugate rispetto alla trasformata.
E importante sottolineare la necessit di una preventiva demodulazione
del segnale in quanto questo ha normalmente le caratteristiche di una portante
modulata in ampiezza dal rilassamento degli spin, fenomeno che costituisce la
fonte dellinformazione. E possibile dimostrare matematicamente che le
informazioni contenenti la risoluzione, cio linformazione preponderante
costituente limmagine, sono tutte contenute nelle linee centrali mentre le
linee pi esterne contribuiscono al contrasto, cio alla definizione dei
dettagli. E allora possibile acquisire solo una parte centrale del k-spazio,
abbastanza estesa da fornire il livello di dettaglio voluto. In questo modo
possibile ottenere una prima diminuzione dei tempi di acquisizione.
Nel k-spazio vengono definiti due assi ortogonali chiamati kx e ky e, come
verr chiarito nel prossimo paragrafo, il primo rappresenta lasse delle
frequenze mentre il secondo rappresenta i passi della codifica di fase.
Caratteristica peculiare del k-spazio la simmetria tale da poter scrivere:
S( k
x
, k
y
) =S
( k
x
, k
y
)
quindi possibile acquisire met del k-spazio ricostruendo successivamente
25
S(t )=
j(
r )e
i
Gr t
d
r =
j(
r )e
i
kr t
d
r
laltra met.
Rappresentazione schematica del k-spazio e delle sue simmetrie
Metodo della trasformata di Fourier bidimensionale per la
ricostruzione dellimmagine
Il metodo comunemente utilizzato e spesso preferito ad altre tecniche quello
della trasformata di Fourier bidimensionale che risulta vantaggioso per la sua
velocit nei calcoli soprattutto per la possibilit di implementazione
attraverso lalgoritmo FFT. Viene definita bidimensionale in quanto permette la
localizzazione spaziale in due sole dimensioni.
In questa tecnica, oltre al gradiente di selezione vengono utilizzati
altri due gradienti, uno in direzione x e laltro in direzione y.
Pi precisamente viene inviato limpulso FID che eccita lo strato,
successivamente viene imposto un secondo gradiente perpendicolare alla direzione
di lettura per un certo lasso di tempo il cui effetto quello di creare uno
26
sfasamento proporzionale alla posizione in questa direzione: con la sua
applicazione, i nuclei pi distanti inizieranno a precedere pi velocemente
rispetto a quelli pi vicini cosi che, quando verr soppresso il gradiente, i
primi avranno percorso un angolo maggiore rispetto ai secondi, avranno
guadagnato cio uno sfasamento maggiore che permetter di localizzarli lungo la
direzione scelta. La frequenza di precessione per tornata quella iniziale ma
verr modificata in fase di lettura con un altro gradiente lungo lultima
direzione. In questo modo il gradiente di selezione permette di scegliere lo
strato, la codifica di fase e quella di frequenza identificano le coordinate del
punto su questo stesso strato. Tuttavia una sola ripetizione di questo processo
fornisce una proiezione dellimmagine che si vuole ottenere, necessario quindi
ripetere lacquisizione un numero di volte sufficiente a ricostruire limmagine.
Ogni ripetizione dellacquisizione avviene sempre nello stesso modo, con
gradienti che sono sempre uguali in direzione, verso ed intensit. Ci comporta
che, ad ogni ciclo, i nuclei accumuleranno una fase di precessione maggiore.
Volendo analizzare la copertura del k-spazio, partiamo dallespressione
del segnale ottenuto:
S( t ) = j ( x , y ) e
i ( G
x
x t x+G
y
y t y )
dx dy = j ( x , y ) e
i ( k
x
x +k
y
y )
dxdy
Una sola acquisizione quindi rappresenta una linea orizzontale sul k-spazio. Si
vede allora come sia necessario effettuare un numero sufficiente di ripetizioni
per ottenerne una copertura adeguata a riprodurre poi limmagine attraverso la
trasformata di Fourier.
Copertura del k-spazio nella tecnica
2DFT
27
La sequenza EPI
La sequenza EPI (Echo Planar Imaging) deriva sostanzialmente dalla sequenza
gradient echo con alcune differenze. Dopo limpulso deccitazione a 90, viene
applicato un gradiente di defasamento lungo la direzione di lettura,
successivamente vengono applicati una serie di gradienti di lettura che si
invertono ogni volta in verso mantenendo costante fra loro intensit e
direzione. Contemporaneamente, in direzione perpendicolare, viene applicato un
gradiente di codifica di fase costante.
La sequenza EPI
Questa sequenza permette di ottenere echi multipli partendo da un unico
impulso di eccitazione, di conseguenza lampiezza degli echi diminuir nel tempo
in quanto contemporaneamente viene recuperata la magnetizzazione longitudinale.
Il limite principale di questa sequenza il numero limitato di echi
acquisibili con un singolo impulso che si traduce inevitabilmente in una
limitata risoluzione spaziale. Per ovviare a questo inconveniente sono state
messe a punto diverse varianti, la pi importante di queste la MBEST. In
questa sequenza, oltre allimpulso di eccitazione, viene applicato un impulso di
rifocalizzazione a 180 in analogia con la sequenza spin echo.
Successivamente vengono applicati i gradienti di lettura invertiti mentre
il gradiente di codifica di fase, anzich essere costante, pulsatile (definito
blipped gradient nella letteratura inglese) e viene attivato prima di ogni
inversione.
28
La sequenza EPI-MBEST
La copertura del k-spazio in una sequenza EPI non lineare come nella 2DFT ma
segue una traiettoria spezzata invertendo ogni volta il verso di percorrenza
delle frequenze: viene acquisita una linea in direzione kx del k-spazio,
limpulso della codifica di fase sposta poi lacquisizione su di una linea
parallela in direzione ky, viene acquisita unaltra linea ma in verso opposto, un
secondo impulso sposta nuovamente la fase e lacquisizione si ripete.
Copertura del k-spazio nella sequenza EPI-MBEST
29
La sequenza Fast Inversion Recovery per immagini di
riferimento anatomico
Per individuare le zone di attivazione in unapplicazione della risonanza
magnetica funzionale necessario acquisire immagini che diano informazioni
sullanatomia del cervello del soggetto sotto analisi. Per questa necessit, il
tipo di sequenza pi adatta linversion recovery che permette di controllare
il contrasto fra materia grigia e materia bianca semplicemente variando il tempo
di interpulso. Tuttavia, lacquisizione di un numero tale di scansioni da
rendere la qualit dellimmagine accettabile, pu impiegare diversi minuti. La
causa maggiore di questo ritardo dovuta al tempo di inversione. La sequenza
fast inversion recovery ottimizza questi tempi andando ad invertire pi sezioni
e poi va ad acquisirle.
La sequenza Fast Inversion Recovery
La frequenza di ripetizione e lintervallo fra uneccitazione e la successiva
viene scelta in modo che, quando si andranno ad acquisire gli echi, gli spin di
cui non si vuole il contributo abbiano appena compiuto linversione. Ad esempio,
per avere immagini senza materia grigia, avente tempo di inversione pari a 1200
ms, vengono invertite quattro sezioni, una ogni 300 ms.
Per avere un confronto, per unimmagine completa del cervello con questa tecnica
sono necessari cinque minuti mentre con la sequenza standard sono necessari
dodici minuti.
Ottimizzazione del tempo di eco nelle sequenze per
limaging funzionale
Come anticipato nel primo capitolo, per individuare le zone di attivazione
30
necessario, in primo luogo, individuare le aree in cui c stata una variazione
del tempo di rilassamento T2* e quindi, a tale scopo, si vogliono acquisire pi
immagini nel tempo pesate su questo parametro e si utilizza quindi spesso una
sequenza del tipo gradient eco.
La dipendenza dellimmagine da T2* strettamente legata al tempo di eco
utilizzato: se troppo corto non ci sar una variazione sensibile del segnale
fra una regione attiva ed una a riposo, se troppo lungo la magnetizzazione
trasversale sar completamente esaurita e quindi non si rilever alcun segnale.
Ampiezza nei segnali in fase di riposo e di attivazione in
funzione del tempo di echo utilizzato
Sperimentalmente si individua che il migliore tempo di eco da utilizzare
pari al T2* della zona da esplorare. Per individuare i valori di questo tempo
delle varie zone del cervello di interesse comune sono stati condotti degli
esperimenti atti ad individuare un intervallo di valori possibile.
Partendo da unEPI, possibile ottenere una sequenza gradient echo
applicando un gradiente nella direzione di lettura a seguito dellimpulso di
eccitazione e poi una serie di impulsi, come nel gradiente pulsatile dellEPI,
di polarit opposta. Volendo ricavare il decadimento del segnale in funzione di
T2* si acquisiscono altri echi invertendo ogni volta la polarit del treno di
impulsi del gradiente generando cos echi che seguono linviluppo di decadimento
secondo T2*.
31
Sequenza per la misura del TE ottimo
Per individuare un valore medio sono stati condotti esperimenti su cinque
soggetti normali coinvolgendo la corteccia visiva, uditiva e motoria. Durante
questi test, in una singola acquisizione venivano rilevati sei echi e venivano
poi confrontate le immagini fra lo stato attivo e lo stato di riposo
interpolando innanzitutto i valori dei picchi degli echi con andamento
esponenziale del tipo:
S(TE)=S
0
e
T
2
Sono stati ricavati poi i valori di T2* in associazione al tempo di eco infine si
calcolato la variazione percentuale fra la media delle acquisizioni
corrispondenti allo stato di riposo e la media di quelle dello stato attivato.
Per individuare poi il risultato ottimo queste percentuali sono state
moltiplicate per il numero di pixel della zona attiva. Fra queste si sceglie il
valore pi alto e se ne ricava il T2* corrispondente. Per la corteccia uditiva e
quella motoria i valori ottimi riscontrati per il tempo di eco sono fra i 30 e i
40 ms mentre per quella visiva sono compresi fra i 25 e i 35 ms
Artefatti nelle immagini
Indipendentemente dal tipo di sequenza utilizzata, le immagini acquisite
soffrono di una certa variet di artefatti che si manifestano in maniera diversa
a seconda della loro origine. Vediamo allora quali possono essere queste variet
e i modi pi comuni per eliminarli:
Artefatti dovuti alle disomogeneit del campo: normalmente si suppone che
32
la frequenza di precessione dei nuclei dipenda solamente dallintensit
del campo magnetostatico in quel punto. Tuttavia ci non rigorosamente
vero, esistono varie cause per cui il campo magnetico pu subire delle
variazioni locali che ledono la qualit, ma soprattutto la
significativit, dellimmagine finale.
Innanzitutto lo shift chimico che ha
leffetto di spostare (to shift) la
posizione sullimmagine di alcuni
nuclei rispetto ad altri anche se
nel campione si trovano nello stesso
punto in quanto il campo magnetico
efficace in un punto dipende anche
dallambiente chimico che circonda
quel punto. Questo artefatto viene
introdotto nella testa dal grasso
che circonda il cranio generante una
sorta di aura. Si pu eliminare
Esempio delleffetto del Chemical
Shift
questo fenomeno attraverso un particolare tipo di sequenza IR
detta STIR: vengono saturati prima gli spin del grasso in modo che, quando
si va ad eseguire la vera e propria sequenza, questi non concorrono al
segnale.
In secondo luogo, anche se il magnete molto ben costruito, il
campo statico non mai perfettamente omogeneo, soprattutto a causa delle
differenze nella suscettivit magnetica fra le ossa e i vari tessuti. Se
queste differenze sono grandi, il campo magnetico lungo un singolo voxel
varier notevolmente riducendo la durata di T
2
* e quindi lampiezza del
segnale. Per ridurre questo tipo di artefatto si utilizzano bobine di shim
che aggiungono una combinazione di campi di forme diverse il cui effetto
quello di aumentare lomogeneit di quello totale. Questi problemi si
fanno sentire maggiormente nelle sequenze rapide come lEPI appena
introdotta, nella direzione della codifica di fase, e difficilmente si
riesce ad aumentare la qualit senza perdere la velocit di acquisizione.
33
Artefatti da campionamento: utilizzando tecniche digitali si va
inevitabilmente incontro al problema del campionamento. La massima
frequenza che pu essere campionata accuratamente utilizzando un
intervallo di campionamento T :
dove T rappresenta la distanza temporale fra i due punti da campionare. Se
il segnale FID ha una componente a frequenza fmax+ apparir come se questa
stessa componente avesse frequenza a fmax-. E possibile ridurre questo
effetto utilizzando un filtro passa-banda che elimini le frequenze che
possono portare ad un aliasing. Per la codifica di fase necessario
accertarsi che esistano un numero sufficiente di campioni per il numero di
passi scelto.
Esistono poi altri tre artefatti dovuti al campionamento, uno
specifico della 2DFT, gli altri due relativi alla sequenza EPI.
Innanzitutto, i movimenti del soggetto generano delle striature localizzate
sullimmagine. Questo problema non riguarda lEPI e nessun
altra tecnica di acquisizione rapida qualora sia sufficientemente veloce
da poter considerare trascurabili questi movimenti. Negli altri casi la
soluzione quella di creare un sincronismo fra le acquisizioni e quei
movimenti che il paziente non pu controllare in maniera volontaria come
la respirazione e il battito cardiaco.
LEPI soffre invece di un altro artefatto noto come
fantasma di Nyquist dovuto al fatto che le linee
acquisite in successione nel k-spazio vengono rilevate
sotto gradienti di lettura opposti. Differenze in questi
due gradienti generano una modulazione delle linee
alternate nel k-spazio che fa apparire dei duplicati
trasparenti dellimmagine. Questo artefatto pu essere
ridotto applicando una qualche correzione di fase
Artefatti di Nyquist
o acquisendo una seconda immagine utilizzando un gradiente alternato
per la lettura invertito rispetto al primo. Infine, dovendo utilizzare un
34
f
max
=
1
2T
gradiente che si inverta rapidamente, la sua forma, nella pratica, non pu
essere perfettamente rettangolare. Generalmente si utilizzano gradienti
che variano con legge sinusoidale, ma in questo modo, se si utilizza un
campionamento lineare, apparir unincrespatura nella direzione di
lettura. Questo si risolve con un sovracampionamento e riarrangiando i
punti in modo da tenere conto della natura sinusoidale del gradiente. In
alternativa si pu impostare un campionamento sinusoidale, aumentando cio
la densit dei punti sui picchi del gradiente.
Artefatti dovuti alla trasformazione secondo Fourier: gli artefatti dovuti
a questa trasformata sono principalmente due. Il primo dovuto al fatto
che vengono acquisiti un numero finito di campioni. Questo si nota
soprattutto nelle zone in cui avviene un cambiamento repentino
dellintensit dellimmagine dove, invece di un bordo netto, si ottiene un
contorno evidente, una sorta di anello pi scuro o pi chiaro,
parallelamente al bordo.
Un altro artefatto quello del punto centrale che si manifesta come
un punto molto luminoso al centro dellimmagine che pu essere
semplicemente eliminato e rimpiazzato con la media dei punti vicini.
Artefatti dovuti ad interferenze esterne: anche i segnali esterni a
radiofrequenza generano artefatti, che appaiono come punti luminosi
sullimmagine se si utilizza un campionamento lineare, o come linee se se
ne utilizza uno sinusoidale. Tuttavia si evitano questi fenomeni
sopprimendoli allorigine, racchiudendo cio le stanze adibite a queste
analisi in una gabbia di Faraday.
Artefatti dovuti alle radiofrequenze esterne
35
Riduzione degli artefatti fantasma
Il tipo pi importante di artefatto, che pu causare diversi problemi in fase di
analisi delle immagini, quello di Nyquist dovuto, come in precedenza
anticipato, al fatto che echi pari ed echi dispari vengono acquisiti con
gradienti opposti. Un imperfetto sincronismo fra il campionamento ed il
gradiente alternato o disomogeneit del campo statico possono causare una
modulazione delle linee alternate del k-spazio. Questo porta ad avere una
riproduzione fantasma spostata della met dei pixel dellimmagine nella
direzione della codifica di fase. Questo tipo di artefatto, oltre a ledere la
qualit dellimmagine, pu portare il programma di riconoscimento delle aree
attivate a considerare attive zone addirittura al di fuori dalla testa se il
campo molto pi ampio del soggetto.
Nonostante sia possibile effettuare dei miglioramenti allhardware del
tomografo, non possibile eliminare completamente questi artefatti ed
necessario rielaborare limmagine una volta acquisita. Lespediente eseguibile
pi semplice consiste in un opportuna correzione di fase, il cui angolo
determinato ad occhio, estesa ad ogni punto delle linee alternate del k-spazio
e per ogni immagine acquisita. Tuttavia una correzione cos semplice attenua
gli artefatti pi semplici ma non elimina quelli pi complessi. Sono stati messi
allora a punto dei metodi che utilizzano delle scansioni di calibrazione per
individuare la correzione pi opportuna. Il primo metodo quello di Bruder che
acquisisce la scansione di calibrazione senza gradiente di codifica di fase. In
questo modo i punti corrispondenti fra gli echi acquisiti, nel caso ideale,
dovrebbero avere tutti la stessa fase. Questo metodo, in poche parole, forza i
punti corrispondenti fra gli echi acquisiti ad avere la stessa fase attraverso
una correzione che poi applicher a tutte le immagini del set. Questo pu essere
effettuato direttamente nel dominio dei tempi attraverso le formule:
dove i valori con pedice c sono riferiti alla scansione di calibrazione e quelli
apostrofati sono riferiti allimmagine corretta.
Un altro metodo basato su di una scansione di calibrazione stato proposto da
Hu e consiste nella cattura di unimmagine di riferimento utilizzando un
gradiente alternato invertito rispetto a quello della normale acquisizione. In
36
altri termini, se nella fase di acquisizione delle immagini finali, la prima
linea viene prelevata sotto un gradiente positivo, la calibrazione inizier
invece con un gradiente negativo. Successivamente le linee pari dellimmagine di
riferimento possono essere utilizzate per correggere le linee dispari di quelle
acquisite. Le due immagini vengono trasformate secondo Fourier nella direzione
di lettura e le linee pari di quella di riferimento vengono invertite. La
correzione di fase da applicare a queste linee nellimmagine normale, in modo
tale che abbiano la stessa fase dellimmagine di calibrazione data da:
in cui i valori aventi pedice 1 sono relativi alla scansione di calibrazione.
Questa correzione pu essere applicata a tutte le immagini utilizzando le
formule:
dove i valori con pedice c sono riferiti alla scansione di calibrazione e quelli
apostrofati sono riferiti allimmagine corretta.
Un altro metodo basato su di una scansione di calibrazione stato proposto da
Hu e consiste nella cattura di unimmagine di riferimento utilizzando un
gradiente alternato invertito rispetto a quello della normale acquisizione. In
altri termini, se nella fase di acquisizione delle immagini finali, la prima
linea viene prelevata sotto un gradiente positivo, la calibrazione inizier
invece con un gradiente negativo. Successivamente le linee pari dellimmagine di
riferimento possono essere utilizzate per correggere le linee dispari di quelle
acquisite. Le due immagini vengono trasformate secondo Fourier nella direzione
di lettura e le linee pari di quella di riferimento vengono invertite. La
correzione di fase da applicare a queste linee nellimmagine normale, in modo
tale che abbiano la stessa fase dellimmagine di calibrazione data da:
37
r ' =
r r
c
+i i
c
.
r
c
2
+i
c
2
i ' =
i r
c
+r i
c
.
r
c
2
+i
c
2
cos0=
r
1
r
2
+i
1
i
2
.
r
1
2
+i
1
2
.
r
2
2
+i
2
2
sin0=
i
1
r
2
+r
1
i
2
.
r
1
2
+i
1
2
.
r
2
2
+i
2
2
in cui i valori aventi pedice 1 sono relativi alla scansione di calibrazione.
Questa correzione pu essere applicata a tutte le immagini utilizzando le
formule:
in questo modo si ottengono tutti i dati dellimmagine che viene formata
trasformando secondo Fourier.
Lutilizzo di una calibrazione di riferimento, com facilmente
comprensibile, non corregge quegli errori di fase che cambiano con il tempo
dovuti, ad esempio, ai movimenti del paziente. Per ovviare a questo
inconveniente, unultima correzione stata proposta da Buonocore derivante
dallosservazione che, se due immagini vengono costruite una con solo gli echi
dispari, mettendo a zero quelli pari, e una con solo gli echi pari, annullando
quelli dispari, entrambe mostrano degli artefatti. Pi nello specifico,
limmagine con i soli echi dispari presenta unartefatto scuro, negativo, quella
con gli echi pari invece contiene artefatti chiari, positivi. Se non ci sono
errori di fase nelle aree contenenti il soggetto nelle due immagini, la
differenza di fase fra loro deve essere nulla. In caso contrario, pu essere
calcolata una differenza di fase pari a 2(x,y) (la differenza viene considerata
doppia perch la correzione di fase va applicata ad entrambe le met del kspazio
quindi, anzich considerare un eccesso per una sola, viene ridotta la
fase di una e aumentata la fase dellaltra). Se non c sovrapposizione fra gli
artefatti e il soggetto, le due immagini possono essere sommate a formare il
risultato finale senza alcun fantasma. Tuttavia, se c sovrapposizione, la
differenza di fase pu essere calcolata nella direzione di lettura. Si calcola
la media di questa differenza nella sola area occupata dalloggetto,
preventivamente comunicata dallutente. Avendo cos ottenuto lo sfasamento, i
dati originali possono essere corretti trasformando secondo Fourier nella
direzione di lettura e moltiplicando le linee dispari per e
i(x)
e quelle pari per
e
-i(x)
.
38
r ' =r cos 0 +i sin0
i ' =i cos 0 r sin0
Schema esplicativo della correzione di Buonocore
La sequenza Interleaved EPI
Uno dei principali problemi nellutilizzo di una sequenza EPI la scarsa
qualit ottenibile e il numero di distorsioni di cui spesso affetta mentre il
grande vantaggio nei tempi di acquisizione che rimangono i pi brevi rispetto
a tutte le altre tecniche. Al contrario, la tecnica 2DFT affetta da molte meno
distorsioni, motivo per cui viene abitualmente utilizzata in ambito clinico.
E stata allora messa a punto la sequenza interleaved EPI che pu essere
considerata, sotto certi aspetti, una via di mezzo fra le sequenze EPI e le
tecniche di ricostruzione 2DFT in modo da ottenere un compromesso ed una
reciproca compensazione dei difetti. Analizzando la copertura del k-spazio si
osserva come questa sequenza, nella sua forma pi semplice, possa essere divisa
in due acquisizioni, una per le linee dispari e una per quelle pari, con la
traiettoria a zig-zag tipica dellEPI. Il ragionamento rimane valido per un
numero qualsiasi di acquisizioni, fino al limite della 2DFT, cio quando una
singola acquisizione rileva una sola linea del k-spazio.
Le sequenze delle due acquisizioni sono sostanzialmente coincidenti con la
variante MBEST dellEPI ma con tre piccole differenze.
39
Sequenza Interleaved EPI
Innanzitutto la parte positiva del gradiente pulsatile ha durata maggiore nella
seconda acquisizione rispetto alla prima in modo tale da assicurarsi che le
linee del k-spazio nelle due sequenze siano spostate in direzione ky e
intrecciate fra loro. In particolare questo si ottiene allungandone
lapplicazione della met della durata di ogni blip.
La seconda differenza fra lintensit degli impulsi in radiofrequenza.
Per comprenderne il motivo analizziamo quello che succede agli spin: con un
primo impulso a 90 viene portata la magnetizzazione longitudinale sul piano
trasverso in modo da poterla rilevare. Un secondo impulso della stessa intensit
viene inviato, dopo lintervallo TR, provocando di nuovo il ribaltamento della
componente longitudinale sul piano trasverso, ma questa non sar completamente
recuperata e quindi, a meno che TR non sia molto maggiore di T1, il nuovo
segnale avr ampiezza molto minore. Questo porta a discontinuit nel k-spazio
che generano artefatti fantasma. Per ovviare a questo problema, il primo impulso
genera un angolo di nutazione minore di 90.
Lultima differenza atta a diminuire le discontinuit di fase nei dati in
funzione del tempo. Lo sfasamento dovuto, ad esempio, alla disomogeneit del
campo, presente anche fuori dalla fase di eccitazione, non rimane costante ma
evolve nel tempo. Dato che le linee del k-spazio vengono acquisite sotto
gradienti opposti, necessario invertirne la met (quelle pari o quelle
dispari) rispetto al tempo prima di trasformarle secondo Fourier per ottenere
limmagine. Questa procedura, unita allaumentare dello sfasamento rispetto al
tempo, porta ad avere dei dislivelli di fase fra due linee contigue che generano
artefatti fantasma. Per compensare questo fenomeno viene aggiunto alln-sima
acquisizione un ritardo temporale dato dalla formula:
40
dove N il numero di acquisizioni (due nel nostro caso) e Tx il tempo
necessario a rilevare una linea del k-spazio
Copertura del k-spazio nellInterleaved EPI
Interleaved EPI multistrato
Dal momento che, normalmente, richiesto di acquisire pi strati durante
unanalisi di fMRI conveniente, per aumentare il rapporto segnale-rumore,
acquisirne diversi contemporaneamente.
Sequenza di copertura dei k-spazi di diversi
strati nellinterleaved EPI multistrato
In questa variante vengono acquisite prima le prime met di tutti gli strati e
41
At =n
T
x
N
poi questi vengono completati. Questo aumenta il valore della componente
longitudinale della magnetizzazione, in quanto aumentano i tempi fra la prima e
la seconda acquisizione, e quindi aumenta il rapporto segnale-rumore. Tuttavia
questa tecnica pi sensibile ai movimenti rispetto alla controparte a strato
singolo in quanto, passando pi tempo fra le due acquisizioni, aumentano le
possibilit di movimentazione del soggetto.
Pro e contro nellutilizzo dellInterleaved EPI
Riduzione delle distorsioni
Dal momento che limaging a risonanza magnetica utilizza la conoscenza del campo
magnetico in ogni punto del campione ed in ogni istante per costruire
unimmagine di densit protonica, ogni irregolarit del campo si manifesta come
una distorsione nellimmagine finale. Anche nel caso ideale in cui il campo
magnetico generato dal magnete sia perfettamente omogeneo, le fluttuazioni della
suscettivit magnetica nel campione causano disomogeneit locali del campo.
Consideriamo un caso desempio, quello di un qualunque segnale campionato per
100 ms.
Parallelismo fra segnale campionato e suo spettro in frequenza
Campionando il segnale per un intervallo di tempo T, nel dominio delle
frequenze, la distanza fra due pixel contigui pari allinverso di questo
intervallo, nel nostro esempio abbiamo un punto ogni 10 Hz. Nel caso di un campo
42
magnetostatico di 3 Tesla, la frequenza di Larmor di 128 MHz. Supponiamo che
nel campione, fra due punti, ci sia una disomogeneit di 0,5 parti per milione
che porta ad avere una frequenza di precessione differenziale di 64 Hz (128 Hz *
106 * 0,5 * 10-6=128/2=64 Hz), questo comporta una distorsione di 6 pixel.
Supponendo fissa la disomogeneit del campo nel tempo, il suo effetto pu essere
ridotto aumentando il distacco in frequenza fra due punti contigui. Questo
avviene ad esempio con linterleaved EPI, rispetto allEPI classica. Usandone la
versione standard a due acquisizioni, il tempo di campionamento viene dimezzato
e quindi la distanza fra due punti in frequenza raddoppia. Aumentando
ulteriormente il numero di acquisizioni, aumenta parallelamente limmunit alle
distorsioni.
Daltro canto, qualora il livello di distorsione dellimmagine sia
accettabile, si pu aumentare la risoluzione dimezzando la frequenza del
gradiente alternato e raddoppiando il numero di acquisizioni. Si pu cos
ottenere alte risoluzioni anche con campi intensi.
Miglioramento della nitidezza delle linee nellimmagine
Un altro beneficio dellinterleaved EPI il miglioramento della nitidezza delle
linee nellimmagine derivante ancora dallaumento dellintervallo in frequenza
fra due punti. Leffetto delle disomogeneit del campo, che comporta il
decadimento del segnale secondo la costante di tempo T2*, quello di convolvere
limmagine nel dominio delle frequenze con una funzione che porta alla
diffusione dei punti (PSF=Point Spread Function).
Effetto del tempo di
rilassamento T
2
* sulla
nitidezza di una linea
nellimmagine
43
Questa funzione non altro che la trasformata di Fourier del decadimento
secondo T2*
se due punti di pari intensit sono separati nellimmagine di , allora la
funzione totale nel dominio delle frequenze data da:
Il criterio di Rayleigh afferma che due pixel sono distinguibili se, presi due
pixel dellimmagine aventi la stessa intensit S0, questi sono separati da un
pixel di intensit non superiore a 0,81S0.
Esempio di due pixel: per il criterio di Rayleigh sono distinguibili solo se
separati da almeno un pixel di intensit massima pari a 0,81 S0
Utilizzando allora questa condizione si pu ottenere la minima frequenza di
separazione fra due punti per poter realmente distinguerli:
Ad esempio un valore tipico per un tomografo a 3T di T2* di 60 ms, che comporta
una frequenza minima di 16Hz. Se si cerca di catturare immagini a risoluzione
maggiore, abbastanza probabile che non rifletta il reale potere separatore
dellimmagine. Volendo acquisire ad esempio una matrice quadrata di 256 punti di
lato con un gradiente alternato a 500Hz utilizzando una EPI si avr una
frequenza per punto poco al di sotto dei 4Hz, inferiore a quella richiesta per
poter realmente distinguere i punti. Tuttavia, utilizzando linterleaved EPI,
44
f (t )=e
t
T
2
F(o)=
T
2
1i oT
2
F (o)=
T
2
1i oT
2
+
T
2
1i (oAo)T
2
Ao
2
=
0,96
T
2
aumentando il numero di acquisizioni per immagine si aumenta anche la frequenza
per punto avvicinandosi a quella ottima: con due acquisizioni si arriva a 8Hz e
con quattro acquisizioni si ottengono 16Hz
Riduzione della corrente nelle bobine dei gradienti:
Se non si vuole aumentare la risoluzione o ridurre le distorsioni, i benefici di
questa tecnica possono essere individuati nella riduzione della corrente nelle
bobine dei gradienti e nellaumento del rapporto segnale-rumore. A questo scopo
si pu ridurre la frequenza del gradiente alternato, riducendo la corrente
circolante e aumentando il tempo di campionamento di una linea del k-spazio.
Questo riduce la banda di campionamento richiesta e aumenta il rapporto segnale
rumore di un fattore pari alla radice delle acquisizioni utilizzate. Inoltre,
riducendo la corrente circolante nelle bobine se ne riduce anche il loro
surriscaldamento.
Artefatti fantasma nellInterleaved EPI
Ogni differenza di fase o di intensit fra le acquisizioni del k-spazio, dovute
ai movimenti del soggetto o allinstabilit hardware dello scanner, genera
artefatti fantasma. Inoltre, dato che questi artefatti sono causati anche
dallinversione del gradiente di lettura, in questa tecnica la situazione
peggiora perch linversione avviene ogni due o pi linee del k-spazio.
Questi artefatti, come gi detto in precedenza, rendono difficile lapplicazione
della risonanza magnetica funzionale e lindividuazione delle zone attivate.
Un primo approccio per la soluzione del problema quello di eliminarne le
cause. Si pu ad esempio bloccare la testa del soggetto e progettare
accuratamente lo stimolo applicato. Tuttavia, per analisi ad alta risoluzione, i
tempi di acquisizione lievitano molto, aumentando il disagio del soggetto e la
sua necessit di muoversi.
Linstabilit hardware da unacquisizione allaltra pu invece essere
ridotta con lutilizzo di un navigator echo che, nella sua forma pi semplice,
si riduce al campionamento di una FID prima dellapplicazione dei gradienti di
acquisizione. Calcolando la fase di questo campione, possibile applicare una
45
correzione alla fase stessa di ogni acquisizione.
Esistono poi altre forme di navigator echo, come ad esempio lapplicazione di un
gradiente in una direzione durante la sua acquisizione per renderlo sensibile ai
movimenti che si sviluppano solo in quella direzione.
Tuttavia, pur migliorando limmagine, dopo lutilizzo di questi espedienti
rimane comunque un numero significativo di artefatti, rimovibili solo con la
successiva rielaborazione dellimmagine. Il miglioramento pi semplice
eseguibile una correzione di fase di ordine zero, cio applicare la stessa
correzione a tutti i punti dellacquisizione.
Per correggere efficacemente limmagine comunque necessario misurare la
quantit di artefatti in modo da poter definire delle condizioni di arresto,
cio la condizione per la quale la qualit dellimmagine risulta accettabile.
Dal momento che la trasformata di Fourier delle linee centrali del k-spazio
rappresenta la componente continua dellimmagine, possibile determinare il
livello di artefatti selezionando queste linee, applicando loro una correzione
di fase, trasformandole secondo Fourier e misurando il rapporto fra i punti
centrali e quelli laterali. Per unimmagine con pochi artefatti, questo rapporto
molto alto. Questo metodo funziona bene qualora si utilizzi unEPI a due
acquisizioni, in quanto in queste tecniche si generano artefatti soprattutto ai
bordi, mentre non risulta molto efficace quando il numero di acquisizioni
cresce, dal momento che, in questi casi, gli artefatti attraversano tutta
limmagine.
Localizzazione degli artefatti allinterno dellimmagine
46
Essendo il movimento lorigine degli artefatti, necessario applicare una
qualche forma di correzione. In questo caso, per definire una condizione di
arresto si pu definire una funzione entropia del tipo:
S=
I
i
lnI
i
dove Ii lintensit delli-esimo pixel, e iterare la correzione dei movimenti
finch questa equazione non raggiunge un minimo.
47
Elaborazione dei Dati
Introduzione
Lo scopo dellanalisi dei dati quello
di individuare le aree del cervello che
hanno cambiato il loro stato di
ossigenazione in risposta allo stimolo,
cio quelle aree che hanno subito
lattivazione. Sono state messe a punto
diverse tecniche, ma ad ogni loro
applicazione necessario stabilire il
livello di confidenza, cio la
possibilit che larea individuata sia
realmente attiva. Ci sono tre livelli nellanalisi dei dati. In primo luogo i
dati vengono pre-processati in modo da eliminare quelle aree che possono
fuorviare il programma di analisi automatica. Durante questa fase viene eseguita
anche unopera di filtraggio del segnale in modo da aumentarne il rapporto
segnale-rumore.
Segue poi lanalisi statistica che determina i pixel che mostrano una
risposta allo stimolo prima dellultima fase, cio la presentazione
dellimmagine che mostra le aree di attivazione, evidenziate da una colorazione
differente, con la valutazione della confidenza statistica attribuibile. Tutti
questi passi vengono ovviamente eseguiti attraverso degli opportuni pacchetti
software. Lo scopo di questo capitolo di illustrare le metodiche fondamentali
per condurre questo tipo di analisi.
Pre-processare limmagine
Formazione dellimmagine, riduzione dellinsieme dei dati e normalizzazione
Come pi volte indicato, i dati acquisiti richiedono la trasformazione secondo
Fourier per formare limmagine. E possibile effettuare ora sui dati,
memorizzati sottoforma di numeri complessi, uno per ogni pixel, la correzione
degli artefatti fantasma modificando la fase di ogni singolo punto come gi
48
espresso nel precedente capitolo. Fallire in questa correzione pu portare i
successivi passi dellindividuazione a indicare come attiva una zona che solo
affetta da errori.
Successivamente viene eseguita la Fast Fourier Transformation (FFT)
bidimensionale utilizzando una routine standard sullimmagine memorizzata
sottoforma di interi a due byte col segno, capaci di rappresentare un intervallo
di valori fra -32767 e 32768, adattandoli a questo intervallo nel caso il loro
reale campo di valori fosse pi ampio oppure pi ristretto.
Vengono poi eseguiti due passi di riduzione del set di dati che
diminuiscono il numero di calcoli da eseguire in modo da ridurre i tempi
necessari per lanalisi. Le scansioni di saturazione, che assicurano che la
magnetizzazione longitudinale abbia raggiunto uno stato di equilibrio, possono
essere eliminate dallinsieme dei dati mentre la matrice pu essere ridotta in
modo da rappresentare solamente il cervello.
Cambiamenti nel flusso globale del sangue al cervello (gCBF), cos come
linstabilit hardware, possono portare ad oscillazioni dellintensit globale
dellimmagine, indipendentemente dallattivit funzionale.
Fluttuazioni dellintensit globale delle immagini in funzione del tempo:
I(t): intensit media dellimmagine catturata al tempo t
I
m
: intensit media dellintero set di immagini
Variazioni di questo tipo mostrano le varie risposte a stimoli identici come se
non fossero realmente uguali fra loro, fattore che riduce la potenza di ogni
analisi statistica. Per ridurre questo effetto si pu normalizzare lintensit
media di ogni immagine a quella media globale di tutto linsieme non
49
considerando nel calcolo le aree affette dagli artefatti, indicate dallutente
prima della normalizzazione, in modo che la media sia condizionata solo dalle
zone di interesse.
Correzione dei movimenti
I movimenti del soggetto sono la principale causa di artefatti nella risonanza
magnetica. I cambiamenti nellintensit dei pixel attorno al cervello possono
essere anche molto pi grandi rispetto a quella dovuta alleffetto BOLD, anche
se i movimenti sono molto piccoli. E conveniente quindi tentare di compensare
questi effetti.
Quello che viene eseguito in prima battuta la correzione delle rotazioni
e delle traslazioni nel piano dellimmagine paragonando fra di loro le immagini
di strati diversi: la prima viene presa come riferimento e le altre vengono
ruotate in modo da risultare allineate con essa. Per capire quando le due
immagini risultano allineate, viene calcolata, pixel per pixel, il quadrato
della differenza fra le due immagini (ssd). Vengono effettuate rotazioni e
traslazioni successive e il processo viene arrestato quando il coefficiente ssd
raggiunge un minimo.
Filtraggio spaziale
Ogni riduzione del rumore nellimmagine aumenta le possibilit che lanalisi
statistica individui le zone di attivazione reali. Il filtraggio per porter
anche ad una riduzione della risoluzione dellimmagine ed quindi necessario
individuare un compromesso fra questi due aspetti.
Il modo pi semplice per eseguire questa procedura quello di utilizzare
un filtro a 9 punti come quello mostrato sotto:
1 2 1
2 4 2
1 2 1
Supponiamo che S(x,y) sia lintensit originale del pixel in quella posizione,
applicando il filtro si ottiene
50
S' ( x , y ) =
4S( x , y )
16
+
2|S ( x 1, y ) +S( x +1, y ) +S( x , y 1 ) +S ( x , y +1 )
16
+
S ( x 1, y 1 ) +S( x +1, y +1 ) +S ( x +1, y 1) +S ( x 1, y +1 )
16
S ' ( x , y ) =
S ( x , y )
4
+
S ( x 1, y ) +S ( x +1, y ) +S( x , y +1 ) +S( x , y +1 )
8
+
S( x 1, y 1 ) +S ( x +1, y +1 ) +S( x +1, y 1 ) +S ( x 1, y +1)
16
sostituisce cio il pixel con uno avente intensit pari alla media di una
matrice di 9 pixel, pesata dai coefficienti del filtro presi facendo coincidere
il centro del filtro stesso con il pixel da sostituire: nella media il pixel
centrale ha peso 4, i quattro pixel adiacenti hanno peso 2 e quelli in diagonale
hanno peso 1, il totale per cui dividere quindi 16.
Un filtro di questo tipo, pur essendo semplice e veloce, non permette di
controllarne lampiezza. Si preferisce allora effettuare il prodotto di
convoluzione dellimmagine con una funzione Gaussiana tridimensionale avente
forma:
dove x, y e z sono le deviazioni standard nelle tre direzioni. Una stima
dellestensione di questo filtro dato dalla larghezza di met del massimo
(FWHM) della distribuzione, cio la distanza orizzontale fra i due punti aventi
valore pari a met del massimo della funzione.
Rappresentazione grafica del parametro FWHM
La relazione fra la deviazione standard e lFWHM :
quindi per filtrare un immagine avente risoluzione 3x3x5 mm3 con una
distribuzione Gaussiana avente FWHM=4mm, i parametri richiesti sono:
Per condurre questoperazione, viene creata una matrice di filtraggio avente le
stesse dimensioni dellimmagine e valore massimo pari ad uno, per assicurarsi
che il valore massimo dellimmagine risultante non sia pi grande dei quattro
byte imposti. Viene poi calcolato il prodotto di convoluzione fra limmagine e
51
f ( x , y , z)=e
(
x
2
2c
x
2
+
y
2
2c
y
2
+
y
2
2 c
y
2
)
FWHM =2,35 c
c
x
=
4
2,35 3
=0,57; c
y
=
4
2,35 3
=0,57 ; c
z
=
4
2,35 5
=0,34
la matrice, trasformandole entrambe secondo Fourier, attraverso la trasformata
tridimensionale, moltiplicandole tra di loro e calcolando poi la trasformata
inversa del risultato per ottenere limmagine finale.
Comparazione fra dati grezzi e filtrati
Non esiste comunque unampiezza del filtro universalmente valida, in generale il
valore migliore quello avente ampiezza pari alla zona attiva catturata.
Lesperienza consiglia comunque che un FWHM di quattro millimetri sia adeguato
nella maggior parte dei casi. Filtri ampi possono essere utilizzati in caso di
basso rapporto segnale-rumore, mentre filtri pi stretti vengono utilizzati
quando questo rapporto abbastanza elevato.
Filtraggio temporale
Esattamente come stato fatto nel dominio dello spazio, anche nel dominio dei
tempi si pu effettuare un filtraggio per migliorare il rapporto segnale-rumore.
Dato che il contrasto BOLD modulato dal flusso sanguigno, la velocit con cui
il segnale pu variare, nelle sole regioni di attivazione, fortemente limitato
da questo fattore. In generale comunque, filtrare lintensit di ogni pixel in
funzione del tempo con una funzione simile al suo andamento, migliora il
rapporto segnale-rumore. In linea di massima, una funzione gaussiana di 2,8
secondi una buona approssimazione per la risposta emodinamica in funzione del
tempo e viene quindi scelta per questo scopo.
Per effettuare questo tipo di filtraggio viene innanzitutto creato un
vettore gaussiano, della stessa durata temporale del pixel, utilizzando la
funzione:
dove w lapertura della funzione. Questa viene trasformata, ridotta in modo
52
f ( t ) =e
t
2
2w
2
che abbia un valore massimo di uno, e le componenti da 1 ad n-1 sono azzerate,
dove n il numero di ripetizioni dellesperimento messo in atto. Questo filtro
passa alto rimuove le basse frequenze di variazione nei dati, senza variare in
maniera significativa il segnale allinsorgere dello stimolo. Quindi, prendiamo
levoluzione temporale di ogni singolo pixel, lo trasformiamo secondo Fourier,
lo moltiplichiamo per il filtro, ed eseguiamo la trasformata inversa. Per
utilizzare lFFT necessario avere un vettore avente un numero di elementi pari
ad una potenza di 2. Si possono porre a zero gli elementi mancanti fino a
raggiungere la potenza di due pi vicina, ma prima di ci bisogna sottrarre al
segnale il suo valore medio per evitare delle discontinuit nei dati. La media
viene poi riaggiunta dopo il filtraggio. Questo metodo tuttavia porta dei
problemi nelle due estremit del segnale, introducendo delle distorsioni che
possono deviare lesito dellanalisi statistica e per questo normalmente la
primo e lultima ripetizione dellesperimento non vengono tenute in
considerazione.
Paragone dati temporali filtrati grezzi. I punti finali e quelli iniziali
subiscono unevidente distorsione
Analisi statistica dei dati
Lo scopo dellanalisi statistica quello di produrre unimmagine che segnali le
regioni in cui, a fronte dello stimolo, avvenuta lattivazione. Molte tecniche
che svolgono questo tipo di analisi sono state messe a punto e molte di queste
sono generalmente in uso. In prima analisi tutte prevedono lassegnazione di un
valore ad ogni pixel dipendente dalla probabilit che lipotesi nulla, cio che
la variazione del segnale osservata dipenda solo da fattori casuali e non
dallattivazione, sia falsa. Unimmagine di questo tipo viene detta mappa
53
parametrica statistica (brevemente SPM=Statistical Parametric Map) e in questo
paragrafo viene mostrato come questo genere di mappa possa essere prodotta,
sempre per via software.
Tecniche sottrattive
Uno dei metodi pi semplici per ottenere dei risultati da un esperimento fMRI a
due stati effettuare una semplice sottrazione. Viene calcolata la media delle
immagini registrate durante la presentazione dello stimolo e la media delle
immagini durante lo stato di riposo. Dal momento che, durante la fase di
attivazione si deve riscontrare una differenza dallo stato di riposo, dal punto
di vista numerico viene sottratta la media delle immagini nello stato di riposo
alla media delle immagini durante lattivazione.
Il primo inconveniente di questo tipo di tecnica la sua sensibilit ai
movimenti della testa che porta ad un certo numero di errori. Inoltre non
effettua unanalisi statistica che porta a determinare un valore correlato alla
probabilit che lipotesi nulla sia falsa, quindi, invece di una sottrazione
diretta, si preferiscono altri metodi come, ad esempio, il t-test di Student.
Il t-test di Student
Questo metodo pesa le differenze sulla media attraverso la deviazione standard
nello stato attivato o nello stato di riposo, dando cos un alto valore t a
grandi differenze nella media con basse deviazioni standard e un valore basso
nel caso opposto. Il valore di t viene calcolato attraverso la formula:
dove
e y2 la varianza congiunta
54
t =
X
1
X
2
c
X
1
X
2
c
X
1
X
2
=
.
c
y
2
n
1
+
c
y
2
n
2
c
y
2
=
( X
1
X
1
)
2
+
( X
2
X
2
)
2
n
1
+n
2
2
dove il pedice 1 si riferisce alle n
1
immagini catturate durante la fase di
attivazione, il pedice 2 si riferisce invece alle n
2
immagini acquisite durante
la fase di riposo mentre i simboli soprassegnati indicano le medie delle
distribuzioni.
Tecniche correlative
Sapendo che leffetto BOLD mediato dal flusso sanguigno, possibile aumentare
lidentificazione delle regioni di attivazione prevedendo landamento della
risposta allo stimolo e calcolando il coefficiente di correlazione fra
levoluzione temporale di ogni pixel e la forma donda di riferimento. In questo
modo il risultato meno sensibile al movimento e ad altre variazioni
fisiologiche avvenute durante lesperimento. Per un evoluzione temporale X ed
una forma donda di riferimento Y, il coefficiente di correlazione assume la
forma:
ed assume valore unitario per una correlazione perfetta, valore nullo se non
esiste alcuna correlazione e valore -1 per una perfetta anti-correlazione, cio
se al crescere dei valori della funzione di riferimento quelli del segnale reale
diminuiscono e viceversa.
E ovvio che la scelta di una corretta forma donda di riferimento
critica per una buona individuazione delle aree attivate. In prima
approssimazione questa pu essere scelta come unonda quadra nella quale il
valore alto attribuibile allattivazione e quello basso alla fase di riposo.
Una forma del genere non comunque verosimile per due motivi: non tiene conto
del ritardo fra lattivazione e la manifestazione delleffetto BOLD ed inoltre
non ha senso pensare ad una variazione dellossigenazione del sangue talmente
repentina da generare un profilo cos ripido. Una prima miglioria potrebbe
essere quella di modificare la fase della forma donda aggiungendo un ritardo
compreso fra i tre e i sei secondi.
Per migliorare ulteriormente la risposta di riferimento necessario
55
r =
( X
X ) ( Y
Y )
.
( X
X )
2
( Y
Y )
2
osservare quella del soggetto in esame. E possibile ad esempio utilizzare due
tipi di stimoli e, individuata la risposta ad uno, utilizzarla come riferimento
per laltra. In un esperimento ad esempio in cui lo stimolo viene presentato
sotto forma visiva, si pu utilizzare la risposta della corteccia visiva per
individuare quella in altre aree del cervello. Agendo in questo modo per si
aumenta la sensibilit agli artefatti dovuti al movimento che influenzano la
risposta di riferimento. Per cercare di ridurre questo fenomeno, si pu ricavare
una risposta media a tutti fra tutte le ripetizioni di stimolazione presentate.
Per prevedere la risposta emodinamica in maniera pi generale, in modo da poter
costruire un segnale di riferimento per uno stimolo di durata arbitraria,
necessario conoscere la risposta ad uno stimolo singolo.
Un primo approccio quello di considerare la risposta emodinamica come una
funzione di diffusione dei punti che sposta nel tempo e addolcisce il profilo
dello stimolo in ingresso. Deconvolvendo (operazione inversa del prodotto di
convoluzione) quindi la risposta di una regione nota con la forma donda dello
stimolo, si pu ottenere la funzione di risposta emodinamica. Tuttavia questa
non valida esattamente per ogni zona del cervello essendo variabile per area:
la funzione di riferimento ottima per una regione pu non esserlo per laltra.
Si pu, in alternativa, modellare la risposta attraverso altre relazioni
matematiche come la funzione di Poisson:
solitamente utilizzata con unampiezza di sei secondi.
Differenze fra diverse funzioni di Poisson al variare di
56
f ( t ) =
\
t
e
\
t !
Dal momento che gli strati acquisiti non vengono catturati nello stesso istante,
necessario adattare le differenze temporali prima della correlazione con la
forma donda di riferimento. A questo scopo, viene predetta lintensit relativa
dellattivazione nellistante in cui ogni strato viene acquisito, convolvendo lo
stimolo con una funzione di Poisson. Successivamente, da questa serie di valori
vengono calcolati i coefficienti di correlazione strato per strato, costruendo
cos la forma donda di riferimento partendo dai valori opportuni nella serie
predetta.
Il modello lineare generalizzato
I metodi descritti finora sono parametrici e partono dallassunzione che le
osservazioni sono effettuate su di una popolazione normale. Tuttavia, la maggior
parte di questi altro non sono che casi particolari del modello lineare
generalizzato, il cui scopo quello di spiegare la variazione del segnale nel
tempo attraverso una combinazione lineare di variabili di ingresso al quale
viene sommato un termine di errore. Nel suo caso pi generale quindi questo
modello assume forma matriciale:
Y=X +c
Dove X la matrice contenente i valori delle variabili dingresso, ha una
colonna per ogni variabile influente e una riga per ogni istante temporale, nel
caso quindi in cui la variabile in ingresso sia una sola, la matrice X diventa
un vettore di lunghezza n. invece rappresenta un vettore di coefficienti
moltiplicativi, rappresenta un vettore di coefficienti di errore, o intercette
ed Y rappresenta la matrice di uscita, costituita in maniera analoga ad X.
Nel nostro caso X e Y sono matrici, la prima rappresenta il segnale di
stimolazione e la seconda il pixel, aventi due colonne, una per la fse di
stimolazione e una per la fase di riposo. Lo scopo del metodo quello di
individuare allora i vettori ed che, sostituiti nellequazione matriciale
legano in maniera corretta X ed Y. Trovando i parametri in corrispondenza di
queste matrici, si pu determinare la presenza o lassenza di attivazione.
Il metodo pi utilizzato per questa analisi il metodo dei minimi
quadrati che stima minimizzando la somma degli scarti quadratici.
57
Q( Y X )
T
( Y X )
differenziando poi rispetto a e mettendo a zero la derivata per trovare il
minimo si trova il vettore che rappresenta la migliore approssimazione
lineare di
X
T
Y=( X
T
X )
dimostrando che XTX invertibile si pu scrivere
=( X
T
X )
1
( X
T
Y )
che sono normalmente distribuiti secondo una gaussiana, e dato che il termine di
errore pu essere determinato, si pu effettuare linferenza statistica e anche
controllare se i parametri corrispondenti al modello di risposta alla
stimolazione sono molto diversi dallipotesi nulla.
Il t-test seriale
Le tecniche descritte richiedono sempre una qualche forma di informazione sulle
immagini acquisite. Per molti esperimenti lutilizzo di tecniche di imaging
rapide, e una buona progettazione degli stimoli, rende possibile la separazione
fra lo stato di riposo e quello di attivazione. In altri casi per, quando non
possibile separare a priori i due eventi, necessario effettuare un altro tipo
di analisi. Sono state allora messe a punto due tecniche, nessuna delle quali fa
assunzioni su come si evolve la risposta da parte del cervello a seguito dello
stimolo: il t-test seriale, descritto di seguito, e lanalisi della varianza
introdotta nel prossimo paragrafo.
Il t-test seriale si fonda sulla definizione di una linea basale durante
la fase di riposo, cio una linea caratterizzata dallessere un minimo stabile.
Per individuare le zone di attivazione viene comparata limmagine acquisita
prima, durante e dopo lo stimolo con questa linea basale. In particolare, per la
linea basale e per ogni istante dopo lo stimolo, vengono create due immagini che
rappresentano la media e la deviazione standard. Successivamente una serie di
t-SPM vengono create calcolando, pixel per pixel, il valore t fra limmagine
media della risposta e quella della linea basale, attraverso le formule citate
in precedenza:
58
t =
X
1
X
2
c
X
1
X
2
; c
X
1
X
2
=
.
c
y
2
n
1
+
c
y
2
n
2
; c
y
2
=
( X
1
X
1
)
2
( X
2
X
2
)
2
n
1
+ n
2
2
Questa tecnica ha due principali inconvenienti: per avere sufficiente rapporto
segnale-rumore, necessario effettuare un numero di cicli di stimolazione
superiore rispetto ad un esperimento suddiviso per epoche aumentando quindi la
durata dellesperimento stesso, in quanto, pur essendo possibile avvicinare
abbastanza le stimolazioni, sempre necessario aspettare almeno dieci secondi
perch leffetto BOLD torni sulla linea basale. In secondo luogo, il risultato
della tecnica sono diverse SPM che devono essere interpretate nel complesso.
Tuttavia, dal momento che questa tecnica fa pochissime assunzioni sullandamento
temporale della risposta, risulta molto robusta e permette di abbandonare gli
esperimenti divisi per epoche rendendone possibile la realizzazione di nuovi
generi.
Analisi della varianza
Questa una tecnica che non necessita di alcuna assunzione sulla forma donda
dellattivazione, ma osserva i cambiamenti della varianza basandosi su una
semplice teoria del calcolo della media. Consideriamo, a titolo di esempio, la
risposta ad uno stimolo ripetuto. Il suo segnale contiene, in generale, due
contributi: il primo la risposta vera e propria mentre laltro deriva da dei
disturbi dovuti a cause fisiologiche e al rumore. Calcolando la media di un
opportuno numero di ripetizioni, si riduce lintensit del rumore senza ridurre
quella del segnale. La quantit di rumore rimosso pu essere stimato calcolando
la varianza del segnale normale e della sua media.
Calcolo della risposta di riferimento a partire da n cicli dellesperimento
59
Per individuare le regioni di attivazione si calcola il rapporto fra la
varianza della risposta media e quella del segnale originale pixel per pixel.
Nelle regioni in cui la variazione del segnale puramente casuale, questo
rapporto sar di circa 1/n, dove n il numero di cicli sui quali viene
calcolata la media, mentre nelle regioni attivate questo numero sar molto pi
alto.La tecnica pu essere spiegata pi formalmente utilizzando la seguente
tabella:
istante t X
11
X
12
.. X
1j
.. X
1n
X
1
istante 2t X
21
X
22
.. X
2j
.. X
2n
X
2
... .. .. .. .. .. .. ..
istante it X
i1
X
i2
.. X
ij
.. X
in
X
i
... .. .. .. .. .. .. ..
istante kt X
k1
X
k2
.. X
kj
.. X
kn
X
k
X
dove Xij rappresenta il punto alli-esimo istante di tempo dopo la j-esima
ripetizione del ciclo. In altre parole, diviso il segnale negli intervalli di
tempo fra uno stimolo e il successivo, lindice j rappresenta il numero
progressivo del ciclo mentre i rappresenta listante temporale considerato
multiplo di un quanto t, quindi listante it, a partire dallinizio del ciclo.
Lipotesi nulla che non vi siano differenze significative fra le medie
dei vari cicli. Questa differenza pu essere testata comparando due stime della
varianza della popolazione, una basata sulle variazioni fra gli stessi punti
temporali (i costante) e una basata sulla varianza fra diversi punti temporali.
La prima si calcola con:
mentre la varianza media fra tutti i punti :
basata su di una distribuzione avente k(n-1) gradi di libert, dove per gradi di
libert si intende il numero di valori necessari a conoscere lintera
distribuzione (nel caso ad esempio di una distribuzione avente n valori
60
c
i
2
=
j =1
n
( X
ij
X
i
)
2
n1
c
w
2
=
i =1
k
c
i
2
k
=
i=1
k
j =1
n
( X
ij
X
i
)
2
k ( n1)
indipendenti, sono sufficienti n-1 valori perch ln-esimo ricavabile dalla
media).
La varianza della media dei punti temporali invece:
ed essendo:
quindi la varianza della popolazione pu essere stimata come:
basata su di una distribuzione avente k-1 gradi di libert. Nellipotesi nulla,
entrambe le varianze w2 e B2 stimano quella della popolazione e quindi la
distribuzione F del loro rapporto in questi casi ha valore approssimativamente
unitario:
in caso di attivazione invece il numeratore assume valori molto maggiori e
quindi F si discosta dallunit in maniera significativa.
Analisi inferenziale delle SPM
I metodi per lanalisi statistica fin qui illustrati generano tutti delle mappe
parametriche statistiche in cui, ad ogni pixel dellimmagine, assegnato un
valore che si basa sulla probabilit che lipotesi nulla sia falsa. Tuttavia il
risultato che si vuole ottenere non un SPM ma bens un immagine del cervello
in cui vengano evidenziate quelle zone che, con un certo livello di confidenza,
possiamo considerare attive. In poche parole andiamo a definire delle soglie per
la mappa.
61
c
X
2
=
i=1
k
(
X
i
X )
2
k 1
c
X
2
=
c
2
n
c
B
2
=nc
X
2
=n
i =1
k
(
Xi
X )
2
k 1
F=
c
B
2
c
w
2
1
Livelli di confidenza per i T-scores, coefficienti di correlazione ed F-scores
Prima di considerare il problema della significativit del set di immagini,
necessario definire lattendibilit dei risultati di un singolo t-test, dei
coefficienti di correlazione o dellanalisi della varianza (definita anche
ANOVA=ANalysis Of VAriance). Per definire il livello di confidenza per
necessario prima conoscere la distribuzione seguita, sotto lipotesi nulla,
dalla popolazione considerata. Ad esempio, se la popolazione segue una
distribuzione Gaussiana, pu essere scelto un valore critico Z per il quale:
scegliendo allora un valore di Z per il quale P=0,005 e applicando questa
soglia alla mappa, tutti i punti Z>Z avranno una probabilit di almeno il 99,5%
che lipotesi nulla sia realmente falsa. In questo contesto il valore 0,005
viene denominato p-value, i valori corrispondenti delle Z sono comunemente
tabulati nei libri di testo ma possono comunque essere ricavati dallespressione
della distribuzione.
Rappresentazione grafica del p-value
La distribuzione dei coefficienti di correlazione dipende dal numero di
gradi di libert della serie temporale sotto analisi. Se questa comprende n
punti indipendenti allora avr n-2 gradi di libert. I coefficienti di
correlazione r possono essere trasformati, attraverso la trasformazione di
Fisher,in modo da assumere una distribuzione normale, cio una Gaussiana con
62
P( Z
o
) =
Z
o
F ( Z ) dZ=o
F ( Z ) dZ
media nulla e varianza unitaria:
che viene applicata a tutta la mappa.
La stessa trasformazione deve essere eseguita anche per i valori t ed f,
ma il procedimento pi complicato: si calcola larea della distribuzione fra t
e infinito (f e infinito) scegliendo poi un valore di z nella distribuzione
normale tale per cui larea sottesa dalla curva sia pari a quella calcolata.
Leffetto del filtraggio temporale sui gradi di libert
Tutti i test statistici incontrati considerano i dati come campioni della
popolazione indipendenti fra loro, ma ci non vero dal momento che leffetto
della risposta emodinamica e del filtraggio temporale crea una dipendenza fra i
campioni contigui riducendo i gradi di libert della distribuzione.
Consideriamo una distribuzione di n osservazioni di una popolazione avente
media , la varianza della popolazione data dalla formula:
che pu essere stimata attraverso la varianza del campione:
Il denominatore di questultima formula rappresenta il numero di gradi di
libert del campione.
Se ora linsieme dei dati viene filtrato con una funzione del tipo:
Ora la somma degli scarti quadratici in media un terzo di quella dei dati
originali. Questo significa che la varianza della popolazione ora meglio
stimata dalla formula:
e implica che i dati filtrati hanno (n-1)/3 gradi di libert.
63
z=
.(n3)
2
ln
1+r
1r
c
2
=
( X
i
j)
2
N
c
s
2
=
( Xi
X )
2
n1
X
n
=
( X
n1
+X
n
+X
n+1
)
3
c
s
2
=3
( X
i
X )
2
n1
Nelle procedure di rielaborazione descritte nei paragrafi precedenti viene
in realt utilizzata una distribuzione Gaussiana. In questo caso, per ogni punto
del campione, necessario andare a valutare leffetto dei punti adiacenti
attraverso larea sottesa dalla Gaussiana. Il numero di gradi di libert nella
varianza del campione per un insieme di n dati, filtrati con una Gaussiana
avente deviazione standard , :
un filtraggio temporale di questo tipo tuttavia non migliora la capacit
dellanalisi della varianza di individuare le zone di attivazione e quindi
meglio non applicarle in combinazione. Rimane comunque possibile applicare un
filtro passa alto che, al contrario, ne migliora le prestazioni.
Il problema delle comparazioni multiple e la teoria dei campi Gaussiani casuali
Tutti i ragionamenti svolti finora devono essere eseguiti sui p-values legati ad
un test statistico. In altre parole, per ciascun pixel, possiamo essere sicuri
per un certo valore p che il suo andamento temporale sia legato allo stimolo.
Prima di presentare limmagine risultante, necessario considerare quanto
possiamo essere sicuri che i pixel indicati come attivati lo siano realmente.
Consideriamo ad esempio la seguente mappa 10x10 esemplificativa:
in cui i pixel ombreggiati indicano le zone che nellesempio supponiamo attive,
aventi p-value maggiore di 0,1 a cui corrisponde un livello di confidenza dell
90%. Dal punto di vista prettamente probabilistico possiamo affermare allora che
uno dei pixel indicato come attivo, non lo realmente. Un problema di questo
64
d=
n1
.2n c
2
tipo viene detto della comparazione multipla. La soluzione a questo problema
deriva dalle sue applicazioni alla PET e si basa sulla teoria dei campi casuali
Gaussiani. Per una mappa casuale D-dimensionale di valori z consistente in S
pixel, il numero di questi che ci si aspetta superino la soglia z, dato da:
che rappresenta larea sottesa dalla Gaussiana. Questa teoria tenta di stimare
il numero di singole regioni (NON pixel) che supereranno la soglia attraverso la
formula:
dove W una misura della risoluzione della mappa. Questa ottenuta misurando
la varianza della derivata prima della SPM per ogni dimensione:
mentre la dimensione media di una regione (in pixel) :
Una volta stimate queste quantit bisogna valutare la probabilit che questa
regione di attivazione, avente valore z superiore a quello alla soglia u, di k
pixel possa essere dovuta a fattori casuali, non sia cio collegata allo
stimolo. Se k dellordine di grandezza di E{n} allora la probabilit alta,
se invece molto pi grande la probabilit si riduce. La distribuzione di
probabilit assume la forma:
dove nmax la dimensione della regione pi estesa con valore di z al di sopra di
u, in una mappa casuale, e:
65
EN=S
1
.2 c
e
x
2
2
dx
Em
Su
D1
W
D
.2
D+1
e
u
2
2
W=
i=1
D
Var
1
.
SPM
i
' D
En=
E N
Em
P( n
max
k ) =1e
Eme
k
2
D
=( I(
D
2
+1) En
1
)
2
D
quindi, per una determinata mappa, il coefficiente W pu essere calcolato, e
solo le regioni aventi un valore z superiore alla soglia u scelta e dimensioni
maggiori del valore k impostato vengono mostrate. Il p-value per queste regioni
pu essere calcolato con le ultime sei formule.
66
Esempio di applicazione della Risonanza
Magnetica Funzionale
Introduzione
Lo scopo di questo capitolo quello di illustrare un possibile esperimento
conducibile per analizzare, ad esempio, la funzione motoria.
Questa funzione controllata da tre principali regioni nel lobo frontale:
la corteccia motoria primaria, larea motoria supplementare, la corteccia
laterale premotoria.
La corteccia motoria primaria responsabile della generazione dei movimenti ed
una sua lesione comporta debolezza nella parte corporea corrispondente. Le altre
tre aree gestiscono i movimenti a livelli pi complessi.
Studiando larea motoria supplementare utilizzando la PET si dedotto il
suo coinvolgimento nella sequenzialit dei movimenti e nel loro inizio. Tuttavia
recentemente studi condotti sugli animali hanno suggerito che questarea pu
essere suddivisa in due parti: larea supplementare premotoria e larea
supplementare motoria vera e propria. La seconda invia e riceve le informazioni
dalla corteccia motoria primaria, e si pensa sia direttamente responsabile
dellesecuzione dei movimenti, mentre larea supplementare premotoria, riceve
informazioni dalla corteccia prefrontale che si pensa sia correlata alla
definizione dei movimenti.
Per verificare queste teorie sulluomo attraverso la risonanza magnetica
funzionale necessario progettare un esperimento che permetta di suddividere la
parte decisionale dal movimento reale. Un esperimento di questo tipo pone molti
problemi in un approccio ad epoche, dove lattivazione dura per un certo numero
di secondi e richiede quindi che in ogni epoca vengano condotti un certo numero
di processi decisionali e la separazione fra le due aree potrebbe essere
impossibile. E invece possibile progettare un paradigma ad eventi che permette
una maggiore differenziazione fra le due aree.
67
Progettazione dellesperimento
Presentazione dello stimolo e ricezione della risposta
In generale, studiando la corteccia motoria, necessario fornire al soggetto
uno stimolo che indichi quando effettuare il movimento, oltre ad effettuare una
misura del movimento stesso. Gli studi pi semplici coinvolgono il movimento
delle amni essendo i pi banali da misurare.
Per generare lo stimolo potremmo
utilizzare un display a sette segmenti
che ci permette di presentare al
soggetto uninfinit di simboli. Come
risposta allo stimolo possibile
utilizzare la pressione di un tasto
effettuabile, ad esempio, attraverso i
pollici. Il dispositivo migliore in
questo caso un tasto attivabile con
una minima forza e avente corsa nota.
La sua pressione per deve avere un
feed-back tattile opportuno, in modo
che il soggetto ne possa avere un
perfetto controllo ed essere certo di
averlo premuto.
Display a 7 segmenti
Per misurare i tempi di risposta possibile utilizzare dei contatori, la cui
numerosit e caratteristiche dettata dalla precisione temporale che vogliamo
ottenere. In questo caso possiamo considerare sufficiente arrivare alla
precisione del millesimo di secondo ed utilizzare quindi due contatori: uno
conta i millisecondi, ricevendo in ingresso un segnale di clock di 1 kHz e
arrivando ad un massimo di mille, il secondo riceve in ingresso unopportuna
combinazione del conteggio del primo, incrementandosi una volta al secondo. Per
il secondo contatore il conteggio massimo del tutto arbitrario, ma deve essere
comunque sufficientemente grande; ipoteticamente possiamo fissare questo valore
a tremila e seicento in modo cos da misurare fino ad un massimo di unora.
Linterruttore di risposta pu essere utilizzato per azzerare il conteggio in
68
modo da misurare esattamente i tempi di risposta. Per prelevarne il valore
necessario lutilizzo di un programma che, nella forma pi semplice, rimanga in
ascolto sul conteggio, effettuando un ciclo infinito, con frequenza pari a
quella del conteggio, durante il quale mantiene in memoria due valori: il valore
precedente del tempo di risposta e quello attuale. Se quello attuale zero, il
valore precedente rappresenta il tempo di risposta, altrimenti il valore
precedente viene sostituito con quello attuale e viene letto quello nuovo. In
alternativa possibile ricevere in ingresso direttamente il segnale di risposta
dal pulsante, leggendo ancora in maniera ciclica il valore del contatore che
viene mantenuto in memoria se il segnale del pulsante alto, altrimenti viene
riletto. Questo programma quindi, in entrambe le forme, si ridurrebbe al
riempimento di un vettore di lunghezza nota a priori e impostata dallutente che
rappresenta anche il numero di stimoli da presentare. Il conteggio viene
disattivato fino a quando non viene presentato lo stimolo. Quindi, oltre ad
ascoltare il cronometro, il nostro programma potrebbe anche pilotare il
display a sette segmenti utilizzato per presentare lo stimolo, in modo da avere
un unico software che gestisce interamente lesperimento. Volendo scegliere
infine un linguaggio di programmazione per la scrittura del codice, il C
sembrerebbe opportuno per la sua capacit di scendere ad un basso livello e la
possibilit di interfacciamento con lassembly che permette un totale controllo
dellelettronica descritta finora. In alternativa possibile, preferendo una
implementazione del codice orientata agli oggetti o anche ad eventi, preferire
il C++ che mantiene i pregi del C ma permette una modellazione di livello
superiore.
Schema semplificato del circuito
di conteggio:
CLK: segnale di clock
EN:abilita il conteggio
AN:risposta del soggetto
IN:ingresso del conteggio
le frecce indicano le linee di interfacciamento con il computer
69
Progettazione del paradigma degli stimoli
Un semplice paradigma ad eventi pu prevedere la presentazione di uno stimolo
ripetuto, come ad esempio laccensione intermittente del numero 2 sul display,
al quale il soggetto per non viene chiesto di rispondere. La risposta deve
invece sopraggiungere quando viene presentato un numero diverso, precedentemente
scelto e noto al soggetto, come ad esempio il 5, che occorre ad intervalli di
tempo pseudo casuale, avente cio durata variabile attorno ad un valore noto e
definito dallutente, come ad esempio dodici secondi, in modo da non abituare il
soggetto e sufficienti allassestamento dei vari fenomeni emodinamici generanti
leffetto BOLD.
In alternativa possibile presentare i due stimoli in maniera
equiprobabile ad intervalli regolari: ogni T secondi presentiamo lo stimolo che
pu essere, indifferentemente, un 2 o un 5. Come prima per la risposta
richiesta solo presentando il 5, in questo modo, confrontando le immagini
acquisite separatamente con i due stimoli, possibile discriminare fra quelle
aree del cervello che generano il movimento e quelle che invece sono deputate
alla parte decisionale.
Una particolare attenzione da dedicare alleliminazione dei movimenti
della testa del soggetto, utilizzando dei meccanismi di bloccaggio. E
necessario ancora scendere a compromessi fra un buon bloccaggio e la comodit
del soggetto. Una prima soluzione pu essere quella di chiudere il lati e il
retro della testa fra cuscini in polistirolo espanso allinterno della bobina a
gabbia duccello. Tuttavia una soluzione del genere non ottimale in quanto,
intuitivamente, il soggetto pu ancora spostare la testa in avanti in quanto, la
distanza dei due cuscini laterali, essendo tale da introdurre la testa, ne
permette anche luscita. Una soluzione definitiva, che permette un buon
bloccaggio della testa senza ridurre la comodit, pu consiste nel sostituire i
due cuscinetti laterali in polistirolo espanso con due cuscinetti gonfiabili. In
questo modo, una volta introdotta la testa, i due cuscini vengono gonfiati fino
a bloccare i movimenti in tutte le direzioni: le rotazioni a destra e a sinistra
sono eliminati dalla pressione dellaria mentre ogni movimento di estrazione
viene eliminato dalla tenuta della superficie dei cuscini sulla pelle del
70
soggetto.
Sistemi di bloccaggio della testa
Acquisizione ed analisi dei dati
Come accennato gi nei capitoli precedenti, il primo fondamentale passo
lacquisizione di unimmagine di riferimento anatomico, che permetta anche
successivamente, confrontandola con le altre, di individuare le aree che hanno
subito lattivazione. Successivamente inizia la vera acquisizione attraverso la
sequenza Interleaved EPI. Una scelta ottimale pu essere quella di acquisire una
matrice di 128x128 punti con una risoluzione di 3x3 mm2, cos uno strato della
testa ricopre solo met della superficie scansionata e non c sovrapposizione
fra limmagine del cervello e gli artefatti fantasma.
Tuttavia, durante questi esperimenti non sufficiente solo acquisire
intere fette della testa, ma necessario avere unelevata frequenza di
ripetizione in modo da monitorare la risposta. Aumentando per la frequenza si
aumenta lenergia dispersa per calore sulle bobine del gradiente. Come espresso
nei capitoli precedenti, possibile dimezzare il numero di punti della matrice
nella direzione della codifica di frequenza per diminuire il tempo di
ripetizione, visto che gli artefatti fantasma si sviluppano nella direzione
della codifica di fase.
Lanalisi dei dati pu essere effettuata attraverso dei programmi che
utilizzino i metodi definiti nei capitoli precedenti, pre-processando i dati con
una normalizzazione ed un filtraggio temporale e spaziale. Le immagini cos
ottenute, contenenti le sole aree attive, colorate normalmente secondo il
livello di confidenza attribuibile, vengono sovrimposte allacquisizione di
riferimento anatomico.
71
Conclusioni
La risonanza magnetica funzionale una tecnica molto giovane e potente che sta
rapidamente trovando applicazioni in ambito clinico e nella ricerca in ambito
neurologico, psicologico e psichiatrico. Tuttavia sono necessari ulteriori
sviluppi sulla tecnica stessa.
Durante la discussione della tecnica si visto come il tempo di eco sia
molto importante per individuare i cambiamenti del segnale dovuti alleffetto
BOLD. Ci sono poi altri parametri secondari che influiscono su questa capacit
come lo spessore degli strati, la dimensione dei voxel ed il tempo di
ripetizione.
La sequenza Fast Inversion Recovery, dati i veloci tempi di scansione
permette di ridurre la durata degli esperimenti, evitando movimenti del paziente
dovuti alla scomodit della posizione che porterebbero ad artefatti.
Un altro aspetto importante da prendere in considerazione la qualit
delle immagini, soprattutto per quanto riguarda gli artefatti di Nyquist che,
come gi ampiamente espresso, comportano problemi nellanalisi statistica delle
immagini. Esistono varie tecniche per eliminare questi difetti, come la
correzione di Buonocore che risulta la pi efficiente soprattutto non
necessitando di acquisizioni di calibrazione ed essendo quindi immune da quegli
artefatti dovuti ai movimenti.
Il punto cruciale della tecnica rimane lanalisi statistica che in
continuo sviluppo nei centri di ricerca, ma normalmente possibile utilizzare
le tecniche illustrate sinergicamente per ottenere risultati pi attendibili.
Per completezza doveroso elencare alcune critiche mosse nei confronti di
questa tecnica:
Il segnale BOLD solo una misura indiretta dell'attivit neurale ed
quindi suscettibile ad influenza da parte di fenomeni fisiologici non
neurali.
La fMRI stata spesso usata per individuare dove avvengano le attivazioni
neurali nel cervello e ci ha portato al nascere di critiche che la
accusano di essere quasi una nuova forma di frenologia. La frenologia
una dottrina pseudoscientifica secondo la quale le singole funzioni
72
psichiche dipenderebbero da particolari zone o "regioni" del cervello,
cos che dalla valutazione di particolarit morfologiche del cranio di una
persona, come linee, depressioni, bozze, si potrebbe giungere alla
determinazione delle qualit psichiche dell'individuo e della sua
personalit. La maggior parte degli scienziati preferisce modelli che
spieghino come funzionino i meccanismi psicologici. In risposta a questa
critica, sostenuto che di vitale importanza il dove sia situata una
determinata funzione cognitiva. La neuropsicologia, la manipolazione
invasiva delle funzioni del cervello e il neuroimaging funzionale
permettono di analizzare differenti aspetti del ruolo di ciascuna regione
cerebrale. L'analogia con la frenologia quindi errata e fuorviante: la
frenologia non ha fondamento scientifico (o comunque minimo), mentre la
fMRI permette di stabilire importanti ipotesi e di verificarle mediante il
metodo scientifico.
Nonostante sia una tecnica non invasiva, la fMRI fornisce una risoluzione
spaziale abbastanza buona. Tuttavia, la risposta temporale relativa
all'afflusso sanguigno, su cui si basa la fMRI, piuttosto lieve in
relazione ai segnali elettrici veicolo delle comunicazioni neuronali.
Alcuni gruppi di ricerca stanno quindi lavorando su questo problema,
combinando la fMRI con dati forniti da altri tipi di esami, come
lelettroencefalografia (EEG) o magnetoencefalografia (MEG). L'EEG ha una
risoluzione temporale molto maggiore, ma una risoluzione spaziale
piuttosto ridotta, mentre la MEG ha una risoluzione temporale al pari
della EEG e risoluzione spaziale simile alla fMRI. Ci ha portato alcuni a
considerare la MEG un esame pi valevole rispetto alla fMRI.
Molti modelli teorici utilizzati per descrivere i segnali fMRI sono poco
precisi, tanto da non essere falsificabili (la falsificabilit un
principio fondamentale del metodo scientifico). Di conseguenza, secondo
alcuni, la fMRI non avrebbe basi scientifiche sufficientemente solide.
Contro questa critica viene sostenuto che gli studi condotti con la fMRI,
se ben strutturati, possono fornire prove in grado di falsificare una
teoria precedente. Inoltre, con modelli matematici e computazionali dei
73
processi neurali ben definiti, la fMRI pu verificare o confutare le
predizioni di tali teorie.
74
Potrebbero piacerti anche
- ANATOMIADocumento52 pagineANATOMIAliaNessuna valutazione finora
- Esercizi Applicazioni Principi Dinamica LiceoDocumento53 pagineEsercizi Applicazioni Principi Dinamica LiceoSara PadovanNessuna valutazione finora
- Riassunto Di ChimicaDocumento67 pagineRiassunto Di ChimicaMarioNessuna valutazione finora
- Altra Scienza - Rivista Free Energy N 27 - Nikola Tesla PDFDocumento172 pagineAltra Scienza - Rivista Free Energy N 27 - Nikola Tesla PDFcorrynt100% (1)
- Il Potere in NoiDocumento37 pagineIl Potere in NoiLinda Erre100% (3)
- MegDocumento7 pagineMegbenten1963Nessuna valutazione finora
- Basi Teoriche NMRDocumento4 pagineBasi Teoriche NMRRobNessuna valutazione finora
- Introduzione NMRDocumento17 pagineIntroduzione NMRaliceinrockNessuna valutazione finora
- RM PrincipiDocumento18 pagineRM PrincipiSante Giuliano TroiaNessuna valutazione finora
- Spettroscopia: Radiazione ElettromagneticaDocumento9 pagineSpettroscopia: Radiazione ElettromagneticaFilomena LongobardiNessuna valutazione finora
- Principi Fisici Di Risonanza Magnetica Originale PDFDocumento29 paginePrincipi Fisici Di Risonanza Magnetica Originale PDFMarioNessuna valutazione finora
- Dispense 2016Documento51 pagineDispense 2016Daniel Bogdan DincaNessuna valutazione finora
- Orazio Svelto e LaserDocumento6 pagineOrazio Svelto e LaserfraformicNessuna valutazione finora
- Lezione1 - Spettroscopia UV VisDocumento51 pagineLezione1 - Spettroscopia UV VisventilabroNessuna valutazione finora
- MetodiDocumento7 pagineMetodiLuisaCurlacciNessuna valutazione finora
- Tesina Completa Radioattivita'Documento31 pagineTesina Completa Radioattivita'zambesi_returnsNessuna valutazione finora
- Spettroscopia AADocumento25 pagineSpettroscopia AAMatteo TreviNessuna valutazione finora
- RM - Principi Di FunzionamentoDocumento27 pagineRM - Principi Di FunzionamentoGuglielmo CannellaNessuna valutazione finora
- Quanto Meccanico e L'effetto Fotoelettrico ColoreDocumento1 paginaQuanto Meccanico e L'effetto Fotoelettrico ColoreFatima CaccamoNessuna valutazione finora
- Le Scienze: Spazi Di Fibre e Teoria Dei QuantiDocumento10 pagineLe Scienze: Spazi Di Fibre e Teoria Dei QuantiMarco FavaronNessuna valutazione finora
- Fisic ADocumento2 pagineFisic APierpaolo ManniNessuna valutazione finora
- Metodi Chimico Fisici D'indagine Applicati Ai Sistemi Molecolari e NanostrutturatiDocumento12 pagineMetodi Chimico Fisici D'indagine Applicati Ai Sistemi Molecolari e NanostrutturatinazzaNessuna valutazione finora
- Dispensa Illuminotecnica 13 14Documento95 pagineDispensa Illuminotecnica 13 14Claudio CiavattaNessuna valutazione finora
- Acceleratore Di Particelle, Luce Di Soncrotrone e AdroterapiaDocumento2 pagineAcceleratore Di Particelle, Luce Di Soncrotrone e AdroterapiaValerioNessuna valutazione finora
- 7 - Spettroscopia NMRDocumento79 pagine7 - Spettroscopia NMRorsolaNessuna valutazione finora
- Tecnologia Della Fotorivelazione Basata Su Dispositivi A Semiconduttore - Corpo TesiDocumento229 pagineTecnologia Della Fotorivelazione Basata Su Dispositivi A Semiconduttore - Corpo TesiEnrico MolinariNessuna valutazione finora
- La Risonanza Magnetica SlideDocumento111 pagineLa Risonanza Magnetica SlideandreaNessuna valutazione finora
- EPRDocumento11 pagineEPR88alexiaNessuna valutazione finora
- Onde Elettromagnetiche PDFDocumento7 pagineOnde Elettromagnetiche PDFOsteofisioNessuna valutazione finora
- Gli SpecchiDocumento136 pagineGli SpecchiMariaGloriaNessuna valutazione finora
- Etere J.C. MaxwellDocumento14 pagineEtere J.C. MaxwellGabriele TozziNessuna valutazione finora
- Simulazione Fisica 2017Documento8 pagineSimulazione Fisica 2017Skuola.netNessuna valutazione finora
- Lo Spettro ElettromagneticoDocumento4 pagineLo Spettro ElettromagneticoGabriele VisentinNessuna valutazione finora
- AstronomiaDocumento169 pagineAstronomiaMarco de BernardiNessuna valutazione finora
- SupersimmetriaDocumento17 pagineSupersimmetriaMario LeoneNessuna valutazione finora
- Microsoft PowerPoint - 2 Sorgente Ei e Sett MagnDocumento30 pagineMicrosoft PowerPoint - 2 Sorgente Ei e Sett Magnmastermv2013Nessuna valutazione finora
- Radioprotezione InfermieristicaDocumento44 pagineRadioprotezione InfermieristicaSofia D'antonioNessuna valutazione finora
- Relativita OldDocumento35 pagineRelativita OldfranzNessuna valutazione finora
- Strumentazione BiomedicaDocumento15 pagineStrumentazione BiomedicaMarco AmatrudaNessuna valutazione finora
- Davide Cieri - Studio Della Vita Media Del Mesone BDocumento53 pagineDavide Cieri - Studio Della Vita Media Del Mesone BDavide CieriNessuna valutazione finora
- 1612 09310 PDFDocumento29 pagine1612 09310 PDFAndrea FinettoNessuna valutazione finora
- RistrettaDocumento77 pagineRistrettaangelo.sgroi85Nessuna valutazione finora
- Elettromagnetismo - Thursday, Mar. 22th - InstapaperDocumento26 pagineElettromagnetismo - Thursday, Mar. 22th - InstapaperAntonioEusebioNessuna valutazione finora
- Fisica EsameDocumento21 pagineFisica EsameGiovanni TinoNessuna valutazione finora
- Meccanica Quantistica e La Chimica - Chimica InorganicaDocumento2 pagineMeccanica Quantistica e La Chimica - Chimica InorganicaGre VellaniNessuna valutazione finora
- Cannata Giuseppe - Etere e RelativitàDocumento14 pagineCannata Giuseppe - Etere e Relativitàmariobianchi182Nessuna valutazione finora
- Equazioni Di MaxwellDocumento10 pagineEquazioni Di MaxwellSalvatore CacciapuotiNessuna valutazione finora
- Appunti Di MagnetostaticaDocumento17 pagineAppunti Di MagnetostaticaNovevacche DemoncowsNessuna valutazione finora
- 1.RMN PrincipiDocumento19 pagine1.RMN PrincipiGiacomo BattagliaNessuna valutazione finora
- Appunti Caratterizzazione 2014Documento90 pagineAppunti Caratterizzazione 2014LuigiBanaNessuna valutazione finora
- Esperimento Di Michelson e MorleyDocumento2 pagineEsperimento Di Michelson e MorleyChiara BellisarioNessuna valutazione finora
- OtticaGeometrica O O 0910Documento42 pagineOtticaGeometrica O O 0910TrinchettoNessuna valutazione finora
- Roba VariaDocumento8 pagineRoba VariaNino 16Nessuna valutazione finora
- Lezione 2Documento74 pagineLezione 2Daniel Bogdan DincaNessuna valutazione finora
- Chimica - Capitolo 7 e 9Documento4 pagineChimica - Capitolo 7 e 9giovannidifonzo10Nessuna valutazione finora
- Manuale Patologico OPTONDocumento111 pagineManuale Patologico OPTONGerson De Oliveira0% (1)
- Appunti-Di-Costruzioni - Vettori e Geometria Delle MasseDocumento97 pagineAppunti-Di-Costruzioni - Vettori e Geometria Delle MasseValentina100% (2)
- Appunti Lezione 1 - Gasdinamica PolitoDocumento8 pagineAppunti Lezione 1 - Gasdinamica PolitoGregorioArjenStiusoNessuna valutazione finora
- PARMIGIANNI, P. - Il Consumo Come Attività Creativa e ProduttivaDocumento8 paginePARMIGIANNI, P. - Il Consumo Come Attività Creativa e ProduttivaMaurizia TintiNessuna valutazione finora
- Verifica Di ChimicaDocumento20 pagineVerifica Di ChimicaEduardo RomilaNessuna valutazione finora
- Cubeta de OndasDocumento5 pagineCubeta de OndasJulián BustosNessuna valutazione finora
- m55 - Prezzo Piu ComponentiDocumento13 paginem55 - Prezzo Piu ComponenticastibraNessuna valutazione finora
- Gru PDFDocumento16 pagineGru PDFCIAO CIAONessuna valutazione finora