Potrebbero piacerti anche
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Beninca Brama Bull8Documento48 pagineBeninca Brama Bull8GrzesiekvNessuna valutazione finora
- Ingegneria Civile Uniroma3 - III Anno - Dimensionamento Di Una Pila Da PonteDocumento56 pagineIngegneria Civile Uniroma3 - III Anno - Dimensionamento Di Una Pila Da PonteEdomrgNessuna valutazione finora
- Esercizi Stud Con Risultati PDFDocumento15 pagineEsercizi Stud Con Risultati PDFValerio Jackson MelucciNessuna valutazione finora
- Dispensa 5 - CollegamentiDocumento93 pagineDispensa 5 - CollegamentiGiant666Nessuna valutazione finora
- Giunti Trave Colonna GeneralitDocumento12 pagineGiunti Trave Colonna GeneralitMatteo MessinaNessuna valutazione finora
- Esercizi Stud Con RisultatiDocumento15 pagineEsercizi Stud Con RisultatiMario TodiscoNessuna valutazione finora
- Dimensionameento Contatti Imp - TerraDocumento86 pagineDimensionameento Contatti Imp - TerraCosimo Damiano PetrachiNessuna valutazione finora
- Amaldi Soluzioni Esercizi 56668 c17Documento39 pagineAmaldi Soluzioni Esercizi 56668 c17Gregory BobovNessuna valutazione finora
- Cap 05 - Elementi Strutturali in Calcestruzzo Armato (Parte 1)Documento36 pagineCap 05 - Elementi Strutturali in Calcestruzzo Armato (Parte 1)Rafael GarciaNessuna valutazione finora
- Ex Acci 1 11 SeiDocumento64 pagineEx Acci 1 11 SeiFabio GalvyNessuna valutazione finora
- SLU Taglio Elementi Non ArmatiDocumento18 pagineSLU Taglio Elementi Non ArmatiAstrid AubryNessuna valutazione finora
- Analisi Strutturali Per Le Verifiche Prestazionali Di Un Viadotto EsistenteDocumento32 pagineAnalisi Strutturali Per Le Verifiche Prestazionali Di Un Viadotto EsistenteFranco Bontempi100% (1)
- Shrink Disc PDFDocumento2 pagineShrink Disc PDFglobalindosparepartsNessuna valutazione finora
- 3 - Tensione e Deformazione - Sforzo Normale - Parte1Documento50 pagine3 - Tensione e Deformazione - Sforzo Normale - Parte1DanielParadiseNessuna valutazione finora
- Nuova-Elettronica-Progetti in Sintonia - 2-5Documento36 pagineNuova-Elettronica-Progetti in Sintonia - 2-5simoni barbaraNessuna valutazione finora
- Tec Installazioni Dimensionamento Linee e ProtezioniDocumento28 pagineTec Installazioni Dimensionamento Linee e ProtezioniGiorgio OlianasNessuna valutazione finora
- Collegamenti Smontabili Non FilettatiDocumento84 pagineCollegamenti Smontabili Non Filettativito200049Nessuna valutazione finora
- Progetti in Sintonia - 1-1Documento36 pagineProgetti in Sintonia - 1-1Franco PuglisiNessuna valutazione finora
- Collegamenti Smontabili Non FilettatiDocumento84 pagineCollegamenti Smontabili Non FilettatiAndrea CunatoNessuna valutazione finora
- Finder 14.01.8.230.0000 14.01 IB1401 ITDocumento1 paginaFinder 14.01.8.230.0000 14.01 IB1401 ITnadaljoachim77Nessuna valutazione finora
- Sistemi Elettrici 2012 - 2013Documento5 pagineSistemi Elettrici 2012 - 2013ErnestoMissoNessuna valutazione finora
- Beginners BJTDocumento82 pagineBeginners BJTFabio Di RadoNessuna valutazione finora
- Abaco Dei Ponti Termici - Errata Corrige N.1 PDFDocumento8 pagineAbaco Dei Ponti Termici - Errata Corrige N.1 PDFSilviaPiccoliNessuna valutazione finora
- Nodi Di Cerchiature in AcciaioDocumento22 pagineNodi Di Cerchiature in AcciaiofabNessuna valutazione finora
- T09 BJTDocumento36 pagineT09 BJTRaffaele PiccinnoNessuna valutazione finora
- 10 BJTDocumento29 pagine10 BJTcryptotab473Nessuna valutazione finora
- Sollecitazioni Semplici (Taglio e Torsione) - 22-24Documento10 pagineSollecitazioni Semplici (Taglio e Torsione) - 22-24andreaNessuna valutazione finora
- Foglio Guida Documentazione SchedaDocumento6 pagineFoglio Guida Documentazione SchedaLaurentEuniceNessuna valutazione finora
- Esercizi Bilanci Di Energia MeccanicaDocumento28 pagineEsercizi Bilanci Di Energia MeccanicareadwidNessuna valutazione finora
- Quiz Oscillatori - DomandeDocumento2 pagineQuiz Oscillatori - Domandeshopping shoppingNessuna valutazione finora
- P8B 1 Inverter Monofase A PWM PDFDocumento82 pagineP8B 1 Inverter Monofase A PWM PDFadelca3980Nessuna valutazione finora
- Appunti Bonati 2Documento43 pagineAppunti Bonati 2Filippo CastelliNessuna valutazione finora
- Molle 2017 Parte2Documento14 pagineMolle 2017 Parte2ManuelLentiNessuna valutazione finora
- Esercizi ChiaiaDocumento29 pagineEsercizi ChiaiaVito FalconieriNessuna valutazione finora
- Elettronica - BJTDocumento12 pagineElettronica - BJTMauro PiazzaNessuna valutazione finora
- Polarizzazione e Magnetizzazione Della Materia NuovoDocumento90 paginePolarizzazione e Magnetizzazione Della Materia NuovoGianmarco MarroccoNessuna valutazione finora
- Amaldi Soluzioni Esercizi 56668 c16Documento31 pagineAmaldi Soluzioni Esercizi 56668 c16Gregory BobovNessuna valutazione finora
- BoxdinrDocumento2 pagineBoxdinrSofianeNessuna valutazione finora
- Power Supply Sepri SEP49290 SC AL06LT00Documento1 paginaPower Supply Sepri SEP49290 SC AL06LT00Liliana ZamoraNessuna valutazione finora
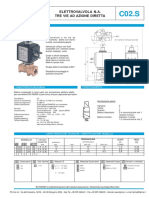
- Elettrovalvola N.A. Tre Vie Ad Azione Diretta: DescrizioneDocumento1 paginaElettrovalvola N.A. Tre Vie Ad Azione Diretta: DescrizioneOscar Ponce de leon AlmanzaNessuna valutazione finora
- 3NOV04 Piluso PDFDocumento22 pagine3NOV04 Piluso PDFVincenzo PilusoNessuna valutazione finora
- Amaldi Soluzioni Esercizi 56668 c15Documento42 pagineAmaldi Soluzioni Esercizi 56668 c15Gregory BobovNessuna valutazione finora
- La Dissipazione Di Potenza Ampli Classe B1Documento9 pagineLa Dissipazione Di Potenza Ampli Classe B1Marco SIMONENessuna valutazione finora
- ImbottitureDocumento5 pagineImbottitureAndrea SteriNessuna valutazione finora
- Costruzioni in Acciaio Carico Di Punta Aste ComposteDocumento18 pagineCostruzioni in Acciaio Carico Di Punta Aste CompostebeppeNessuna valutazione finora
- Esercizio Albero Statico2PDocumento11 pagineEsercizio Albero Statico2Ptony995Nessuna valutazione finora
- Esercitazione 10Documento6 pagineEsercitazione 10Riccardo SerenellaNessuna valutazione finora
- 03 AcciaioCls Esempio Di Calcolo Trave Secondaria Con Soletta Collaborante PDFDocumento9 pagine03 AcciaioCls Esempio Di Calcolo Trave Secondaria Con Soletta Collaborante PDFr_zoro87Nessuna valutazione finora
- Resorte ConicoDocumento8 pagineResorte ConicoSebastianRojasPerillaNessuna valutazione finora
- TRASFORMATOREDocumento26 pagineTRASFORMATOREhidiyNessuna valutazione finora
- 19 - La Composizione Degli Spostamenti PDFDocumento8 pagine19 - La Composizione Degli Spostamenti PDFEleonora RossettiNessuna valutazione finora
- Verifica Colonne PendolariDocumento62 pagineVerifica Colonne PendolariTommaso Pascon100% (1)
- Controventi SistemidiprotezionepassivaperlesmicaDocumento41 pagineControventi Sistemidiprotezionepassivaperlesmicaangelo_caroneNessuna valutazione finora
- Verifica Torri ProvvisorieDocumento7 pagineVerifica Torri ProvvisorieLeonardo BalocchiNessuna valutazione finora
- 1 DisDocumento26 pagine1 DisAndrea CozzolinoNessuna valutazione finora
- Lez 43Documento8 pagineLez 43Francesco PreteNessuna valutazione finora
- Transistor BJTDocumento4 pagineTransistor BJTAhmad RawashdehNessuna valutazione finora
- Classi Di Resistenza Per DadiDocumento2 pagineClassi Di Resistenza Per DadiTommaso LeatiNessuna valutazione finora
- Anelli Seeger Spessore Maggiorato Carichi Assiali PDFDocumento2 pagineAnelli Seeger Spessore Maggiorato Carichi Assiali PDFTommaso LeatiNessuna valutazione finora
- Calcolo Viti Trapezie - 2Documento9 pagineCalcolo Viti Trapezie - 2Tommaso LeatiNessuna valutazione finora
- Anelli Seeger Spessore Maggiorato Carichi AssialiDocumento2 pagineAnelli Seeger Spessore Maggiorato Carichi AssialiTommaso LeatiNessuna valutazione finora
- Simbologia Pneumatica - 2Documento5 pagineSimbologia Pneumatica - 2Tommaso LeatiNessuna valutazione finora
- Tolleranze Dimensionali e Rugosità PDFDocumento25 pagineTolleranze Dimensionali e Rugosità PDFTommaso LeatiNessuna valutazione finora
- Tabelle Uni en 2768 1 22768 2Documento22 pagineTabelle Uni en 2768 1 22768 2Tommaso LeatiNessuna valutazione finora
- Contini - Ingegneria ForenseDocumento51 pagineContini - Ingegneria ForenseTommaso LeatiNessuna valutazione finora
- Zincatura A Caldo GuidaDocumento24 pagineZincatura A Caldo GuidaTommaso LeatiNessuna valutazione finora
- IndirizzituttescuoleitalianeDocumento219 pagineIndirizzituttescuoleitalianeverri100% (2)
- Ipnomentalismo gtf654pxnDocumento135 pagineIpnomentalismo gtf654pxnPietro Gioia BaroneNessuna valutazione finora
- LEOPARDIDocumento2 pagineLEOPARDISARA BORGONOVONessuna valutazione finora
- Manuale Officina Aprilia RSV1000-Tuono (ITA)Documento386 pagineManuale Officina Aprilia RSV1000-Tuono (ITA)mone7792% (13)
- 23 Richiesta Domicilio SanitarioDocumento2 pagine23 Richiesta Domicilio SanitariogiuNessuna valutazione finora
- Robinia Pseudo Acacia - WikipediaDocumento4 pagineRobinia Pseudo Acacia - Wikipediapanzer99Nessuna valutazione finora
- Il Recupero Sostenibile Dell'Edilizia Dei Primi Decenni Del Ventesimo Secolo Mediante Materiali e Tecniche InnovativeDocumento466 pagineIl Recupero Sostenibile Dell'Edilizia Dei Primi Decenni Del Ventesimo Secolo Mediante Materiali e Tecniche InnovativebluenebulaNessuna valutazione finora