Potrebbero piacerti anche
- Informatica Excel VbaDocumento98 pagineInformatica Excel Vbabosnia76Nessuna valutazione finora
- 2015-02-07 PS SdCII SoluzioneDocumento2 pagine2015-02-07 PS SdCII SoluzionestobbarthNessuna valutazione finora
- I Pronomi Personali e RelativiDocumento16 pagineI Pronomi Personali e RelativiCarmela DesioNessuna valutazione finora
- Massonnet 150318133414 Conversion Gate01Documento36 pagineMassonnet 150318133414 Conversion Gate01Fabrizio Biserna100% (1)
- ESEMPIO Di Calcolo Di Una Trave Mista Acciaio CalcestruzzoDocumento16 pagineESEMPIO Di Calcolo Di Una Trave Mista Acciaio CalcestruzzoGinoNessuna valutazione finora
- DIM. ALBERO Solo FaticaDocumento8 pagineDIM. ALBERO Solo FaticaAne CorralNessuna valutazione finora
- Tecnica Delle Fondazioni - Quaderno Degli EserciziDocumento9 pagineTecnica Delle Fondazioni - Quaderno Degli EserciziNicola100% (2)
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Relazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreDocumento38 pagineRelazione Tecnica Di Verifica Di Componenti Di Un MotoriduttoreFabio MoramarcoNessuna valutazione finora
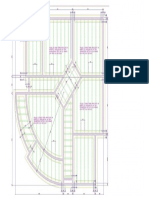
- Relazione Telaio PianoDocumento28 pagineRelazione Telaio PianoLudovica-Vittoria PivettaNessuna valutazione finora
- Relazione Di Laboratorio Di Fisica Energia MeccanicaDocumento10 pagineRelazione Di Laboratorio Di Fisica Energia MeccanicaTommaso Elmi100% (1)
- Calcolo Di Una Molla A Passo VariabileDocumento3 pagineCalcolo Di Una Molla A Passo Variabileangelo dovelliNessuna valutazione finora
- Sezioni in Calcestruzzo - Flessione Semplice A SLUDocumento11 pagineSezioni in Calcestruzzo - Flessione Semplice A SLUVincenzo PanasitiNessuna valutazione finora
- Esempi Validazione APIDocumento32 pagineEsempi Validazione APIguitarnick2Nessuna valutazione finora
- Esercizi - Svolti TecnicaDocumento4 pagineEsercizi - Svolti TecnicaPACO FERRANTENessuna valutazione finora
- Levitatore MagneticoDocumento7 pagineLevitatore Magneticoclaudio_fiandrino8877100% (2)
- Ta ApribiliDocumento48 pagineTa ApribiliAle ContiniNessuna valutazione finora
- Tablice Za Dimenzioniranje (ARMIN)Documento91 pagineTablice Za Dimenzioniranje (ARMIN)benjo992100% (1)
- AA2 EduardoPerotoniMartinottoDocumento13 pagineAA2 EduardoPerotoniMartinottoFábio SistoNessuna valutazione finora
- Esercizi TrazioneDocumento10 pagineEsercizi TrazioneAnonymous 2dQzkEnVWuNessuna valutazione finora
- Esercizi SleDocumento10 pagineEsercizi SleBucciarelloNessuna valutazione finora
- Ex Acci 1 11 SeiDocumento64 pagineEx Acci 1 11 SeiFabio GalvyNessuna valutazione finora
- Fisica 5Documento2 pagineFisica 5GabrieleNessuna valutazione finora
- 4-Geotecnica EA PDFDocumento44 pagine4-Geotecnica EA PDFDawsonNessuna valutazione finora
- Analisis Sismico Sin RefDocumento33 pagineAnalisis Sismico Sin RefluzagredasNessuna valutazione finora
- Travi GerberDocumento3 pagineTravi GerberTudor VladNessuna valutazione finora
- Temi Esami StatoDocumento22 pagineTemi Esami StatopincoNessuna valutazione finora
- Unioni Saldate Flessione-TaglioDocumento4 pagineUnioni Saldate Flessione-TagliomrcNessuna valutazione finora
- Unione Bullonata A Taglio-Torsione e FlessioneDocumento7 pagineUnione Bullonata A Taglio-Torsione e FlessioneLinda Di FrancoNessuna valutazione finora
- Aste ComposteDocumento12 pagineAste Composteroccia1989Nessuna valutazione finora
- Filtro Ps AltoDocumento6 pagineFiltro Ps Altorifat2842003Nessuna valutazione finora
- Calcolo Sezione A TDocumento6 pagineCalcolo Sezione A TFilippo AristeiNessuna valutazione finora
- Amplificatore AudioDocumento7 pagineAmplificatore AudioPECAFENessuna valutazione finora
- Esercizi Svolti PDFDocumento4 pagineEsercizi Svolti PDFErreParadossoNessuna valutazione finora
- Esercizi Di Statistica BivariataDocumento35 pagineEsercizi Di Statistica BivariataEdoardo TerraNessuna valutazione finora
- AFFIDABILITA 06 Casi-LG - IT PDFDocumento17 pagineAFFIDABILITA 06 Casi-LG - IT PDFLudovicoVicoNessuna valutazione finora
- Capitolo 8Documento6 pagineCapitolo 8uomoputrefattoNessuna valutazione finora
- TRAVE - Verifica Di FessurazioneDocumento5 pagineTRAVE - Verifica Di FessurazioneGiovanniNessuna valutazione finora
- Analisi Modale Di Un TelaioDocumento11 pagineAnalisi Modale Di Un TelaioTommasoNessuna valutazione finora
- TabellaProgettoMsemplice0 0667Documento3 pagineTabellaProgettoMsemplice0 0667David SmithNessuna valutazione finora
- Tri FeltDocumento135 pagineTri FeltAndy TurnoNessuna valutazione finora
- Esercizi: Metodo Delle ForzeDocumento21 pagineEsercizi: Metodo Delle ForzeAngelo LavinoNessuna valutazione finora
- TAGLIO Traliccio A Inclinazione VariabileDocumento7 pagineTAGLIO Traliccio A Inclinazione VariabileBidiblu PipponzoNessuna valutazione finora
- Lezione11 2 BullonatureDocumento24 pagineLezione11 2 Bullonaturemarco bombelliNessuna valutazione finora
- Navier Mery EsercizioDocumento10 pagineNavier Mery EsercizioMia MercerNessuna valutazione finora
- Anelli ElasticiDocumento26 pagineAnelli ElasticiMichele TrevisiolNessuna valutazione finora
- DC - h2 - Temp - Serie - Parallel v4Documento22 pagineDC - h2 - Temp - Serie - Parallel v4faroukouladissa8Nessuna valutazione finora
- Campo Magnetico Informe 13Documento4 pagineCampo Magnetico Informe 13Bryan Mendoza PilcoNessuna valutazione finora
- Soluzione Consolidazione TerzaghiDocumento3 pagineSoluzione Consolidazione TerzaghiHiago MonteiroNessuna valutazione finora
- Giunto FlangiatoDocumento5 pagineGiunto FlangiatoPippo FrancoNessuna valutazione finora
- Resistenze in Serie e in ParalleloDocumento6 pagineResistenze in Serie e in ParalleloGuihe ZhanNessuna valutazione finora
- Antonio Rizzi - (N.5) Relazione ElettronicaDocumento10 pagineAntonio Rizzi - (N.5) Relazione ElettronicaStefano SecciaNessuna valutazione finora
- Esame 1Documento3 pagineEsame 1Giorgio MarraraNessuna valutazione finora
- Dimenzionisanje Grede - Naponi, PrslineDocumento12 pagineDimenzionisanje Grede - Naponi, PrslinezarkobujicNessuna valutazione finora
- 13 1 9 Esercizi Svolti1Documento7 pagine13 1 9 Esercizi Svolti1LeonardoMadeira11Nessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- 05 - CCAE - Metodi Di AnalisiDocumento54 pagine05 - CCAE - Metodi Di AnalisiuniversalmenteNessuna valutazione finora
- 04 CCAE DegradoDocumento63 pagine04 CCAE DegradouniversalmenteNessuna valutazione finora
- 03 CCAE Cls-Acciaio-OperaDocumento104 pagine03 CCAE Cls-Acciaio-OperauniversalmenteNessuna valutazione finora
- 06 - CCAE - Metodo Tensioni AmmissibiliDocumento94 pagine06 - CCAE - Metodo Tensioni AmmissibiliuniversalmenteNessuna valutazione finora
- 07 - CCAE - Metodi Di Affidabilità StrutturaleDocumento21 pagine07 - CCAE - Metodi Di Affidabilità StrutturaleuniversalmenteNessuna valutazione finora
- 08 - CCAE - Model Code For Service Life DesignDocumento16 pagine08 - CCAE - Model Code For Service Life DesignuniversalmenteNessuna valutazione finora
- Lezione Ponti 26052023Documento21 pagineLezione Ponti 26052023universalmenteNessuna valutazione finora
- Il Mitico Ponte Sullo Stretto Di MessinaDocumento289 pagineIl Mitico Ponte Sullo Stretto Di MessinaarchmaxNessuna valutazione finora
- 02 - CCAE - Vulnerabilita' e Valutazione Della SicurezzaDocumento58 pagine02 - CCAE - Vulnerabilita' e Valutazione Della SicurezzauniversalmenteNessuna valutazione finora
- Relazioni Tra Le Componenti Di Deformazione e TensioneDocumento12 pagineRelazioni Tra Le Componenti Di Deformazione e TensioneuniversalmenteNessuna valutazione finora
- Linee Guida Per La Classificazione e Gestione Del Rischio, La Valutazione Della Sicurezza Ed Il Monitoraggio Dei Ponti EsistentiDocumento90 pagineLinee Guida Per La Classificazione e Gestione Del Rischio, La Valutazione Della Sicurezza Ed Il Monitoraggio Dei Ponti EsistentiDaniele DominicNessuna valutazione finora
- Esercizi fisII 2Documento32 pagineEsercizi fisII 2universalmenteNessuna valutazione finora
- Fonda Zion IDocumento1 paginaFonda Zion IuniversalmenteNessuna valutazione finora
- Tabella Variabile StandardizzataDocumento1 paginaTabella Variabile StandardizzatauniversalmenteNessuna valutazione finora
- ECM 3 Calcolo Delle Ruote Dentate (Hertz)Documento3 pagineECM 3 Calcolo Delle Ruote Dentate (Hertz)alessandroNessuna valutazione finora
- Cap III Forme Di GovernoDocumento7 pagineCap III Forme Di GovernogdsxxxNessuna valutazione finora
- EDILTEC X FOAMcertificatoidoneitCAMDocumento3 pagineEDILTEC X FOAMcertificatoidoneitCAMrocchino gualanoNessuna valutazione finora
- 1 1 Pila ISO OSIDocumento29 pagine1 1 Pila ISO OSIMicheleNessuna valutazione finora
- 1 Laura Bassi Articolo-2 PDFDocumento10 pagine1 Laura Bassi Articolo-2 PDFAnna Chiara FrauliniNessuna valutazione finora