Potrebbero piacerti anche
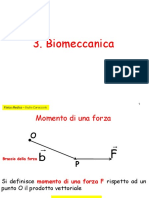
- 3 BiomeccanicaDocumento39 pagine3 BiomeccanicasmagrazioNessuna valutazione finora
- Esercizi per le gambe e i piedi - Esercizi illustrati per irrobustire e rendere esteticamente perfette le estremità inferioriDa EverandEsercizi per le gambe e i piedi - Esercizi illustrati per irrobustire e rendere esteticamente perfette le estremità inferioriNessuna valutazione finora
- Sbobina FisicaDocumento36 pagineSbobina Fisicaclacelove2004Nessuna valutazione finora
- Appunti Di Fisica (Classe Quarta)Documento69 pagineAppunti Di Fisica (Classe Quarta)Liceo F. Vercelli100% (1)
- La Fisica Dello SquatDocumento7 pagineLa Fisica Dello Squatantoniozannini100% (1)
- Ganzini BiomeccanicaDocumento177 pagineGanzini BiomeccanicaChloe BujuoirNessuna valutazione finora
- Cenni Di BiomeccanicaDocumento24 pagineCenni Di BiomeccanicariccardorNessuna valutazione finora
- Elementi Di Meccanica PDFDocumento55 pagineElementi Di Meccanica PDFMatteoNessuna valutazione finora
- Palancas BiofisicaDocumento4 paginePalancas BiofisicaMartina RojasNessuna valutazione finora
- Didattica Bagher-RicezioneDocumento3 pagineDidattica Bagher-RicezioneSimone MontuoriNessuna valutazione finora
- (Ebook - Ita - Manuali) Fisioterapia - Come Allenare Gli AddominaliDocumento6 pagine(Ebook - Ita - Manuali) Fisioterapia - Come Allenare Gli AddominaliCricchio BrinerNessuna valutazione finora
- GiroscopioDocumento8 pagineGiroscopioilfufyNessuna valutazione finora
- Uda Fitness RiepilogoDocumento8 pagineUda Fitness RiepilogoNicolò GrassoNessuna valutazione finora
- Unità 1 Cinematica Dei Corpi Rigidi M ZDocumento33 pagineUnità 1 Cinematica Dei Corpi Rigidi M ZCrescenzo P.Nessuna valutazione finora
- 7 - Biomeccanica Sistema Muscolo Scheletrico - 2Documento48 pagine7 - Biomeccanica Sistema Muscolo Scheletrico - 2Alessia PernaNessuna valutazione finora
- ForzeDocumento8 pagineForzeGIULIA SARTORIONessuna valutazione finora
- Lezione 6 Aa20162017Documento34 pagineLezione 6 Aa20162017Anonymous QRUEIaNessuna valutazione finora
- 2 - Le Forze e I MotiDocumento3 pagine2 - Le Forze e I MotiLorenzo MantaNessuna valutazione finora
- Anatomia Fisiologia BasiDocumento58 pagineAnatomia Fisiologia BasiSergiu TudorNessuna valutazione finora
- Formulario Fisica Generale 1Documento19 pagineFormulario Fisica Generale 1Matteo RoselliniNessuna valutazione finora
- Franzoni 2Documento14 pagineFranzoni 2ramonbossNessuna valutazione finora
- Spalla Routine ErcolessiDocumento3 pagineSpalla Routine ErcolessicapedecazzeNessuna valutazione finora
- MomentoAngolare Cap12 Par12 AmaldiDocumento8 pagineMomentoAngolare Cap12 Par12 AmaldiCarlo MunNessuna valutazione finora
- Il Muscolo Forza-Velocità, Potenza, Marcia e Corsa, Calore Di Attivazione e Di Rilasciamento, Frequenza Ottimale e Velocità OttimaleDocumento15 pagineIl Muscolo Forza-Velocità, Potenza, Marcia e Corsa, Calore Di Attivazione e Di Rilasciamento, Frequenza Ottimale e Velocità Ottimaleapi-3704348100% (1)
- Lezione NomenclaturaDocumento9 pagineLezione NomenclaturaAndrea TognacciniNessuna valutazione finora
- Rotazioni Ed Equilibrio PDFDocumento14 pagineRotazioni Ed Equilibrio PDFDomenico ZucaroNessuna valutazione finora
- Esercitazione31 03 23 - SOLUZIONEDocumento9 pagineEsercitazione31 03 23 - SOLUZIONEFrancesco CartaNessuna valutazione finora
- 1 - Terminologia Delle Scienze MotorieDocumento20 pagine1 - Terminologia Delle Scienze MotorieRaffaele TestaNessuna valutazione finora
- Circuito Allenamento Funzionale 2015 2016Documento8 pagineCircuito Allenamento Funzionale 2015 2016Fabio LuccheseNessuna valutazione finora
- 6 - Biomeccanica Sistema Muscolo Scheletrico - 1Documento56 pagine6 - Biomeccanica Sistema Muscolo Scheletrico - 1Alessia PernaNessuna valutazione finora
- Lezione On Line Classe I Statica e LeveDocumento7 pagineLezione On Line Classe I Statica e LeveLuca LopezNessuna valutazione finora
- Roll/slide/spinDocumento59 pagineRoll/slide/spinRiccardo ChecchinNessuna valutazione finora
- Dispensa 18 - Esercizi in Aula Ed AltriDocumento13 pagineDispensa 18 - Esercizi in Aula Ed AltriimjappoNessuna valutazione finora
- 50 TrazioniDocumento24 pagine50 TrazioniBronson FrederickNessuna valutazione finora
- Allenamento - Movimenti PugilatoDocumento68 pagineAllenamento - Movimenti PugilatoEmilio DesiderioNessuna valutazione finora
- Esercizi PesisticaDocumento12 pagineEsercizi PesisticaMichele MionNessuna valutazione finora
- Copia Di IL MOTO ARMONICODocumento4 pagineCopia Di IL MOTO ARMONICODaniela MarkuNessuna valutazione finora
- Relazione Di Laboratorio Sul Piano InclinatoDocumento21 pagineRelazione Di Laboratorio Sul Piano Inclinatomipiacemrgoldstein0% (1)
- Corpi Rigidi 1Documento12 pagineCorpi Rigidi 1Chiara De SimoneNessuna valutazione finora
- Elementi Di MeccanicaDocumento55 pagineElementi Di MeccanicaPaoloPetragliaNessuna valutazione finora
- Praxis 2007 34 IDocumento16 paginePraxis 2007 34 IVeronaNessuna valutazione finora
- Biomeccanica Del GinocchioDocumento11 pagineBiomeccanica Del GinocchioGiovanni SiglianoNessuna valutazione finora
- Analisi Posturale Leggera PDFDocumento12 pagineAnalisi Posturale Leggera PDFpaolo68audisioNessuna valutazione finora
- La VelocitàDocumento4 pagineLa Velocitàelena risio100% (1)
- Richiami Sul Moto RotatorioDocumento29 pagineRichiami Sul Moto RotatoriocostruzioneautoNessuna valutazione finora
- 1 05 MotiRelativiDocumento13 pagine1 05 MotiRelativiLuca SchiavonNessuna valutazione finora
- CinematicaDocumento21 pagineCinematicamattythebestxdNessuna valutazione finora
- Moto ParabolicoDocumento9 pagineMoto ParabolicomikeoldfieldNessuna valutazione finora
- Appunti Di Fisica MedicaDocumento18 pagineAppunti Di Fisica MedicaRiccardoFumagalliNessuna valutazione finora
- BiomeccanicaDocumento30 pagineBiomeccanicaalexander pillacaNessuna valutazione finora
- Lez Scmat Dinamica V Corpo RigidoDocumento54 pagineLez Scmat Dinamica V Corpo RigidoLeonardo CanditoNessuna valutazione finora
- Scheda N1Documento2 pagineScheda N1Antonio IaiuneseNessuna valutazione finora
- Anatomia Artos UpDocumento54 pagineAnatomia Artos UpJennifer LopezNessuna valutazione finora
- FisicaI TsDocumento5 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Il Moto Di Una TrottolaDocumento6 pagineIl Moto Di Una Trottolamarco_girardi_3Nessuna valutazione finora
- Adduttori Posteriori in RPG Emiliano GrossiDocumento6 pagineAdduttori Posteriori in RPG Emiliano GrossiFlavio VillaNessuna valutazione finora
- Relazione Di Fine TirocinioDocumento2 pagineRelazione Di Fine TirociniosteNessuna valutazione finora
- Tirol RiffianDocumento4 pagineTirol RiffianGabriele SeggioliNessuna valutazione finora
- Questionario 1Documento1 paginaQuestionario 1steNessuna valutazione finora
- Apparato RespiratorioDocumento15 pagineApparato RespiratoriosteNessuna valutazione finora
- Attività Motoria in Ambiente Naturale: Una Scelta Per La VitaDocumento13 pagineAttività Motoria in Ambiente Naturale: Una Scelta Per La VitasteNessuna valutazione finora
- Lezione Metodologia Dell'allenamento Corso Fidal PDFDocumento265 pagineLezione Metodologia Dell'allenamento Corso Fidal PDFste100% (1)
- Apparato RespiratorioDocumento15 pagineApparato RespiratoriosteNessuna valutazione finora
- Antropologia Sociale PDFDocumento87 pagineAntropologia Sociale PDFsteNessuna valutazione finora
- 4 - Lezione Surreni 2 - ParteDocumento27 pagine4 - Lezione Surreni 2 - PartesteNessuna valutazione finora
- Apparato CardioDocumento16 pagineApparato Cardioste100% (1)
- Riflessioni in Tema Di Regolamento Tecnico Sportivo Dello Sci AlpinoDocumento17 pagineRiflessioni in Tema Di Regolamento Tecnico Sportivo Dello Sci AlpinosteNessuna valutazione finora
- 1 Lezione Principi Generali Dell'allenamento PDFDocumento9 pagine1 Lezione Principi Generali Dell'allenamento PDFsteNessuna valutazione finora
- Jurismind Mappe Diritto PrivatoDocumento24 pagineJurismind Mappe Diritto PrivatosteNessuna valutazione finora
- 4 - Lezione Surreni 2 - ParteDocumento87 pagine4 - Lezione Surreni 2 - PartesteNessuna valutazione finora
- 4 - Lezione Surreni 2 - ParteDocumento27 pagine4 - Lezione Surreni 2 - PartesteNessuna valutazione finora
- 4 - Lezione Surreni 2 - ParteDocumento87 pagine4 - Lezione Surreni 2 - PartesteNessuna valutazione finora
- Jurismind Mappe Diritto PrivatoDocumento24 pagineJurismind Mappe Diritto PrivatosteNessuna valutazione finora
- Dispensa Materiali Ceramici IIDocumento155 pagineDispensa Materiali Ceramici IIRiccardo ZaghenoNessuna valutazione finora
- Informiamoci N°6 - Il Fantasma Della MarognaDocumento9 pagineInformiamoci N°6 - Il Fantasma Della MarognanovaldasticonordNessuna valutazione finora
- DMK 16 - Lovato PDFDocumento10 pagineDMK 16 - Lovato PDFrafalejandro78Nessuna valutazione finora
- Rendimento Iso e PolitropicoDocumento32 pagineRendimento Iso e PolitropicoBondi BeachNessuna valutazione finora