Potrebbero piacerti anche
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Il Progetto Allo SLU Per Il Taglio. Prof. Fabrizio MollaioliDocumento150 pagineIl Progetto Allo SLU Per Il Taglio. Prof. Fabrizio MollaiolitensoregreenNessuna valutazione finora
- 12 2010 Ca TaglioDocumento17 pagine12 2010 Ca TaglioNicola TomasiNessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- Lezione 27 Strutture (Norma Sismica - Progetto Elementi Strutture Cls Intelaiate)Documento85 pagineLezione 27 Strutture (Norma Sismica - Progetto Elementi Strutture Cls Intelaiate)uhkefor52Nessuna valutazione finora
- 7SLVDocumento42 pagine7SLVjessica borrielloNessuna valutazione finora
- 2 TorsioneDocumento21 pagine2 Torsionedanilodicoste91Nessuna valutazione finora
- Sezioni in Parete Sottile2Documento46 pagineSezioni in Parete Sottile2Federico PiccoliNessuna valutazione finora
- (Ebook - Ingegneria - Ita) Tecnica Delle Costruzioni Tecnica Delle Costruzioni AcciaioDocumento122 pagine(Ebook - Ingegneria - Ita) Tecnica Delle Costruzioni Tecnica Delle Costruzioni AcciaioLorenzo FornasariNessuna valutazione finora
- SLU Taglio C.A.Documento19 pagineSLU Taglio C.A.giuliano1980100% (1)
- Un Procedimento Numerico Per La Verifica A Taglio Biassiale Nei Pilastri in C.A.Documento7 pagineUn Procedimento Numerico Per La Verifica A Taglio Biassiale Nei Pilastri in C.A.Giacomo ValentiniNessuna valutazione finora
- Costruzione Dominio Di Interazione 2Documento37 pagineCostruzione Dominio Di Interazione 2Matteo MessinaNessuna valutazione finora
- Sollecitazioni Di TaglioDocumento5 pagineSollecitazioni Di TaglioFausto FaviaNessuna valutazione finora
- 2014-15 TDC SLU-Torsione (Modalità Compatibilità)Documento48 pagine2014-15 TDC SLU-Torsione (Modalità Compatibilità)Gabriele torconeNessuna valutazione finora
- SLU TaglioDocumento86 pagineSLU Taglioadavide9Nessuna valutazione finora
- SLU TaglioDocumento46 pagineSLU TaglioFabio SchiaffinoNessuna valutazione finora
- Pci - Cemento Armato3Documento31 paginePci - Cemento Armato3MassimoRoncoNessuna valutazione finora
- Cemento Armato4Documento16 pagineCemento Armato4pinoNessuna valutazione finora
- TorsioneDocumento30 pagineTorsioneIlaria IorlanoNessuna valutazione finora
- Calcestruzzo Armato - Teoria - 1Documento55 pagineCalcestruzzo Armato - Teoria - 1IsaNessuna valutazione finora
- I SOLAI LE ARMATURE - Uniroma3 - ArchitetturaDocumento54 pagineI SOLAI LE ARMATURE - Uniroma3 - ArchitetturaDaniele BernabeiNessuna valutazione finora
- Il Progetto Dei Nodi Edifici Nuovi Cemento ArmatoDocumento13 pagineIl Progetto Dei Nodi Edifici Nuovi Cemento ArmatoMarco ConsortiNessuna valutazione finora
- La Verifica A Taglio Nel Cemento ArmatoDocumento3 pagineLa Verifica A Taglio Nel Cemento Armatoantonioviton07vkNessuna valutazione finora
- Esercizi BeerCap9Documento11 pagineEsercizi BeerCap9Elisabetta PalatellaNessuna valutazione finora
- L1 17 Acciaio Cls GiuntiDocumento186 pagineL1 17 Acciaio Cls GiuntiFabio GalvyNessuna valutazione finora
- Gara - Newmark Beam e SL - Bozza 01Documento26 pagineGara - Newmark Beam e SL - Bozza 01Marco Della PelleNessuna valutazione finora
- Stato Limite Ultimo Per Tensioni NormaliDocumento9 pagineStato Limite Ultimo Per Tensioni NormaliellalellaNessuna valutazione finora
- TonioloDocumento16 pagineTonioloEric GugginoNessuna valutazione finora
- PredimensionamentoDocumento26 paginePredimensionamentojessica borrielloNessuna valutazione finora
- Linea Elastica Flessionale - TecnoLogicaDocumento1 paginaLinea Elastica Flessionale - TecnoLogicaTrinchettoNessuna valutazione finora
- 16 Stati Limite Tensioni Tangenziali TorsioneDocumento44 pagine16 Stati Limite Tensioni Tangenziali TorsioneAGOSTINO BUSEGHINNessuna valutazione finora
- Presentazione SolaiDocumento62 paginePresentazione SolaiMarta BarattiniNessuna valutazione finora
- Strutture in Acciaio 2008 v1.5Documento133 pagineStrutture in Acciaio 2008 v1.5grandfunk46Nessuna valutazione finora
- Appunti Taglio BidiBluDocumento13 pagineAppunti Taglio BidiBluBidiblu PipponzoNessuna valutazione finora
- SLU Taglio Elementi Non ArmatiDocumento18 pagineSLU Taglio Elementi Non ArmatiAstrid AubryNessuna valutazione finora
- Flessione Semplice-Doppia ArmaturaDocumento13 pagineFlessione Semplice-Doppia Armaturail mascheratoNessuna valutazione finora
- Momento CurvaturaDocumento12 pagineMomento CurvaturaJack Mayhua HuamanNessuna valutazione finora
- Dispensa 5 - CollegamentiDocumento93 pagineDispensa 5 - CollegamentiGiant666Nessuna valutazione finora
- Taglio Torsione CADocumento95 pagineTaglio Torsione CAbosnia76Nessuna valutazione finora
- 4 Metodi Soluzione PiastreDocumento27 pagine4 Metodi Soluzione PiastreAleksiey PellicciaNessuna valutazione finora
- Collegamenti AcciaioDocumento6 pagineCollegamenti AcciaioCARMELONessuna valutazione finora
- Appunti Taglio Nel C.A. - Prof. de LucaDocumento30 pagineAppunti Taglio Nel C.A. - Prof. de LucaSergio grilloNessuna valutazione finora
- Sollecitazioni e Deformazioni Per La Trave Semplicemente Appoggiata Con CaricoDocumento4 pagineSollecitazioni e Deformazioni Per La Trave Semplicemente Appoggiata Con CaricoJonathan DomiziNessuna valutazione finora
- Verifica Torri ProvvisorieDocumento7 pagineVerifica Torri ProvvisorieLeonardo BalocchiNessuna valutazione finora
- Ceravolo - Strutture in Acciaio E in Cemento Armato PDFDocumento182 pagineCeravolo - Strutture in Acciaio E in Cemento Armato PDFValerio MastroianniNessuna valutazione finora
- Taglio Torsione CADocumento84 pagineTaglio Torsione CAAlain BangiuNessuna valutazione finora
- AGMA - Dimensionamento Statico e Verifica A Fatica Ruote Dentate - (2004)Documento8 pagineAGMA - Dimensionamento Statico e Verifica A Fatica Ruote Dentate - (2004)Leonardo PestanaNessuna valutazione finora
- Pareti in C.A.Documento55 paginePareti in C.A.Luca De ProsperisNessuna valutazione finora
- 1.1-Legami CostitutiviDocumento22 pagine1.1-Legami CostitutiviPaolo CantoniNessuna valutazione finora
- Lezione18 ImbozzamentoDocumento17 pagineLezione18 ImbozzamentocapspugnaNessuna valutazione finora
- Lezione 21 Ponti (Instabilità Locale Inelastico Parte2)Documento37 pagineLezione 21 Ponti (Instabilità Locale Inelastico Parte2)pierpaolorossiNessuna valutazione finora
- C.A.P. Per StudentiDocumento36 pagineC.A.P. Per StudentiAndreaMercuriNessuna valutazione finora
- Modulo I Lezione 4Documento22 pagineModulo I Lezione 4pr_rossiNessuna valutazione finora
- LEZIONE 6 - Transverse Analysis of Box Girder BridgesDocumento23 pagineLEZIONE 6 - Transverse Analysis of Box Girder BridgesLuca Dal MolinNessuna valutazione finora
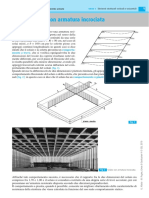
- Solai Solette Armatura Incrociata PDFDocumento10 pagineSolai Solette Armatura Incrociata PDFAleksiey PellicciaNessuna valutazione finora
- 1 Sbalzi FBDocumento47 pagine1 Sbalzi FBmirkoNessuna valutazione finora
- 03c STRUTTURE 2016-17 Rev11Documento16 pagine03c STRUTTURE 2016-17 Rev11roccoNessuna valutazione finora
- 03b STRUTTURE 2016-17 Rev11Documento14 pagine03b STRUTTURE 2016-17 Rev11Riccardo CateniNessuna valutazione finora
- 03a Strutture 2016-17 Rev11Documento22 pagine03a Strutture 2016-17 Rev11roccoNessuna valutazione finora
- Delibera 5 2017 OIV SSRDocumento26 pagineDelibera 5 2017 OIV SSRroccoNessuna valutazione finora
- Lezione 25 Ponti Punzonamento Ec2 2005ppt Modalit Ponti Ponti e GrandiDocumento42 pagineLezione 25 Ponti Punzonamento Ec2 2005ppt Modalit Ponti Ponti e GrandiroccoNessuna valutazione finora
- Lezione 2 Ponti (Classificazione)Documento52 pagineLezione 2 Ponti (Classificazione)roccoNessuna valutazione finora
- Lezione 20 Ponti Sezioni Composte Acciaio CalcestruzzoDocumento171 pagineLezione 20 Ponti Sezioni Composte Acciaio CalcestruzzoroccoNessuna valutazione finora
- Lezione 2 Progetto Travippt Modalit Compatibilit Ponti 2017 18lezione 2Documento86 pagineLezione 2 Progetto Travippt Modalit Compatibilit Ponti 2017 18lezione 2roccoNessuna valutazione finora
- Lezione 22 Ponti AppoggiDocumento46 pagineLezione 22 Ponti AppoggiroccoNessuna valutazione finora
- Lezione 2 Ponti (Classificazione)Documento52 pagineLezione 2 Ponti (Classificazione)roccoNessuna valutazione finora
- Insegnare Per Competenze Quaderno 02 30657 PDFDocumento83 pagineInsegnare Per Competenze Quaderno 02 30657 PDFFranca BorelliniNessuna valutazione finora
- Delibera 5 2017 OIV SSRDocumento26 pagineDelibera 5 2017 OIV SSRroccoNessuna valutazione finora
- Competenze Ps IDocumento46 pagineCompetenze Ps IroccoNessuna valutazione finora
- I Pronomi Personali e RelativiDocumento16 pagineI Pronomi Personali e RelativiCarmela DesioNessuna valutazione finora
- Cap III Forme Di GovernoDocumento7 pagineCap III Forme Di GovernogdsxxxNessuna valutazione finora
- 1 1 Pila ISO OSIDocumento29 pagine1 1 Pila ISO OSIMicheleNessuna valutazione finora
- 1 Laura Bassi Articolo-2 PDFDocumento10 pagine1 Laura Bassi Articolo-2 PDFAnna Chiara FrauliniNessuna valutazione finora
- ECM 3 Calcolo Delle Ruote Dentate (Hertz)Documento3 pagineECM 3 Calcolo Delle Ruote Dentate (Hertz)alessandroNessuna valutazione finora
- EDILTEC X FOAMcertificatoidoneitCAMDocumento3 pagineEDILTEC X FOAMcertificatoidoneitCAMrocchino gualanoNessuna valutazione finora
- Informatica Excel VbaDocumento98 pagineInformatica Excel Vbabosnia76Nessuna valutazione finora
- La medicina di santa Ildegarda: Per tutti i giorni e per tutta la famiglia.Da EverandLa medicina di santa Ildegarda: Per tutti i giorni e per tutta la famiglia.Valutazione: 5 su 5 stelle5/5 (2)
- Il Grande Dizionario della MetaMedicina: Guarire interpretando i messaggi del corpoDa EverandIl Grande Dizionario della MetaMedicina: Guarire interpretando i messaggi del corpoNessuna valutazione finora
- Anatomia della Guarigione: I sette principi della Nuova Medicina IntegrataDa EverandAnatomia della Guarigione: I sette principi della Nuova Medicina IntegrataValutazione: 5 su 5 stelle5/5 (2)
- Tecnologia delle biofrequenze (La): radionica e tecniche vibrazionali: nuovi percorsi della medicinaDa EverandTecnologia delle biofrequenze (La): radionica e tecniche vibrazionali: nuovi percorsi della medicinaValutazione: 3.5 su 5 stelle3.5/5 (2)
- Biologia quantistica e Cronobiologia fasciale osteopaticaDa EverandBiologia quantistica e Cronobiologia fasciale osteopaticaNessuna valutazione finora
- Il Piano Dietetico del Dr. Nowzaradan: La Bilancia non Mente, la Gente Mente! L'unica Dieta da 1200 kcal del Dr NOW per Perdere Peso Velocemente. Piano Dietetico di 30 GiorniDa EverandIl Piano Dietetico del Dr. Nowzaradan: La Bilancia non Mente, la Gente Mente! L'unica Dieta da 1200 kcal del Dr NOW per Perdere Peso Velocemente. Piano Dietetico di 30 GiorniNessuna valutazione finora
- Cucina che cura: Consigli e ricette per rafforzare il sistema immunitario e contrastare i disturbi più comuniDa EverandCucina che cura: Consigli e ricette per rafforzare il sistema immunitario e contrastare i disturbi più comuniNessuna valutazione finora
- Nel segno di Nibiru. Dalla Mesopotamia ai segreti vaticani.Da EverandNel segno di Nibiru. Dalla Mesopotamia ai segreti vaticani.Nessuna valutazione finora
- Boomers contro millennials: 7 bugie sul futuro e come iniziare a cambiareDa EverandBoomers contro millennials: 7 bugie sul futuro e come iniziare a cambiareNessuna valutazione finora
- La teoria della terra cava. The hollow earth theoryDa EverandLa teoria della terra cava. The hollow earth theoryValutazione: 3 su 5 stelle3/5 (1)
- La Techno Mente dell'Imperatore: Libri Asino RossoDa EverandLa Techno Mente dell'Imperatore: Libri Asino RossoNessuna valutazione finora
- Acqua potabile: inquinamento e riflessi sulla saluteDa EverandAcqua potabile: inquinamento e riflessi sulla saluteNessuna valutazione finora
- Piena Coscienza : Lezioni da leggere prima di dormireDa EverandPiena Coscienza : Lezioni da leggere prima di dormireNessuna valutazione finora
- Nomofobia: Cos'è, chi ne soffre, perché esisteDa EverandNomofobia: Cos'è, chi ne soffre, perché esisteNessuna valutazione finora
- Identità Rara. La lotta dei malati rari per il riconoscimento socialeDa EverandIdentità Rara. La lotta dei malati rari per il riconoscimento socialeNessuna valutazione finora
- Autodesk Inventor | Passo dopo Passo: Progettazione CAD e Simulazione FEM con Autodesk Inventor per PrincipiantiDa EverandAutodesk Inventor | Passo dopo Passo: Progettazione CAD e Simulazione FEM con Autodesk Inventor per PrincipiantiNessuna valutazione finora
- Ricomincia dalla pancia: Scopri il potere anti-età del microbioma e ritrova la tua salute partendo da dentroDa EverandRicomincia dalla pancia: Scopri il potere anti-età del microbioma e ritrova la tua salute partendo da dentroIsabella PolliNessuna valutazione finora
- Metaverso: La guida visionaria per principianti per scoprire ed investire nelle Terre Virtuali, nei giochi nella blockchain, nell’arte digitale degli NFT e nelle affascinanti tecnologie del VRDa EverandMetaverso: La guida visionaria per principianti per scoprire ed investire nelle Terre Virtuali, nei giochi nella blockchain, nell’arte digitale degli NFT e nelle affascinanti tecnologie del VRValutazione: 5 su 5 stelle5/5 (8)
- Approccio ai disordini dell'EAB: L'Equilibrio Acido-Base nella pratica clinicaDa EverandApproccio ai disordini dell'EAB: L'Equilibrio Acido-Base nella pratica clinicaNessuna valutazione finora