Potrebbero piacerti anche
- Ruote DentateDocumento10 pagineRuote Dentatec_a_lindberghNessuna valutazione finora
- 13 RuoteDentate PDFDocumento7 pagine13 RuoteDentate PDFPoncio BelleriNessuna valutazione finora
- Introduzione Ruote DentateDocumento9 pagineIntroduzione Ruote DentateKara HensleyNessuna valutazione finora
- Ruote Dentate A Denti DirittiDocumento22 pagineRuote Dentate A Denti Dirittidpiperis1118100% (3)
- Gear and Geometric ErrorDocumento33 pagineGear and Geometric ErrorGialluca DemicisNessuna valutazione finora
- Richiami Ruote Dentate 06Documento26 pagineRichiami Ruote Dentate 06Enrico SabotNessuna valutazione finora
- Organi Di TrasmissioneDocumento25 pagineOrgani Di TrasmissionemgualdiNessuna valutazione finora
- Costruzione IngranaggiDocumento18 pagineCostruzione IngranaggiUgoNessuna valutazione finora
- Dati Tecnici Pignoni CoroneDocumento11 pagineDati Tecnici Pignoni Coronechicho6404Nessuna valutazione finora
- 13 RuoteDentateDocumento7 pagine13 RuoteDentateFederico PintoNessuna valutazione finora
- TEORIADocumento41 pagineTEORIANick NameNessuna valutazione finora
- Ruote DentateDocumento27 pagineRuote DentateobertocNessuna valutazione finora
- Formule Per Calcolo Degli Elementi Geometrici - Dentature Esterne PDFDocumento9 pagineFormule Per Calcolo Degli Elementi Geometrici - Dentature Esterne PDFmgualdiNessuna valutazione finora
- Ruote e RotismiDocumento37 pagineRuote e Rotismifabio106Nessuna valutazione finora
- 13 RuoteDentate PDFDocumento7 pagine13 RuoteDentate PDFDany StarkNessuna valutazione finora
- Meccanica Applicata Ruote DentateDocumento26 pagineMeccanica Applicata Ruote DentatePublio AurelioNessuna valutazione finora
- Trasmissioni A CatenaDocumento176 pagineTrasmissioni A CatenaEnrico MauroNessuna valutazione finora
- Trasmissione Mediante Ruote DentateDocumento10 pagineTrasmissione Mediante Ruote DentatealessandroNessuna valutazione finora
- 09-Ruote DentateDocumento10 pagine09-Ruote DentateJaceNightstormNessuna valutazione finora
- Tesina Damiano ComplDocumento20 pagineTesina Damiano Complxlord7328Nessuna valutazione finora
- ECM Appunti Sulle Ruote DentateDocumento34 pagineECM Appunti Sulle Ruote DentateFrank WhittleNessuna valutazione finora
- Mat 04Documento2 pagineMat 04francesNessuna valutazione finora
- Le Ruote DentateDocumento28 pagineLe Ruote DentateAne CorralNessuna valutazione finora
- Ruote DentateDocumento23 pagineRuote Dentatelmax53Nessuna valutazione finora
- 04 - Collegamenti Filettati - DTIDocumento81 pagine04 - Collegamenti Filettati - DTIincipit32Nessuna valutazione finora
- Guscio SfericoDocumento2 pagineGuscio SfericoRenato Di MatteoNessuna valutazione finora
- Zanichelli - Sammarone - Curve Meccaniche PDFDocumento5 pagineZanichelli - Sammarone - Curve Meccaniche PDFFagianaNessuna valutazione finora
- 03 Ecdm2012 Ruote DentateDocumento26 pagine03 Ecdm2012 Ruote DentateGianluca SantagataNessuna valutazione finora
- Progetto Di Una Coppia Di Ruote DentateDocumento5 pagineProgetto Di Una Coppia Di Ruote Dentatest_luiseNessuna valutazione finora
- Calcolo - Trasmissione A Ingranaggi PDFDocumento19 pagineCalcolo - Trasmissione A Ingranaggi PDFmgualdiNessuna valutazione finora
- Curve Meccaniche - SammaroneDocumento5 pagineCurve Meccaniche - SammaronecgmannerheimNessuna valutazione finora
- 04 Ingranaggi CinematicaDocumento33 pagine04 Ingranaggi CinematicamgualdiNessuna valutazione finora
- Controllo Degli Ingranaggi - SitoDocumento9 pagineControllo Degli Ingranaggi - SitojefersonpimentelNessuna valutazione finora
- Montature & Lenti: Con Breve Storia Degli OcchialiDocumento20 pagineMontature & Lenti: Con Breve Storia Degli OcchialiMirela AndreevNessuna valutazione finora
- Glossario Illustrato Sulle RettificatriciDocumento18 pagineGlossario Illustrato Sulle RettificatriciAntonella Ricagno100% (1)
- 5 - Filettature e Collegamenti FilettatiDocumento34 pagine5 - Filettature e Collegamenti FilettatikerambitNessuna valutazione finora
- 2 Costruzioni GeometricheDocumento36 pagine2 Costruzioni GeometricheMarco BrunoNessuna valutazione finora
- Ruote Dentate A Denti ElicoidaliDocumento13 pagineRuote Dentate A Denti Elicoidalidpiperis1118100% (1)
- Ruote Dentate TeoriaDocumento16 pagineRuote Dentate Teoriamickthequickl100% (1)
- Zupcasti PrenosniciDocumento16 pagineZupcasti Prenosnicibosko8550% (2)
- Dimensionamento Di Alberi e Alloggiamenti Per Prestazioni OttimaliDocumento2 pagineDimensionamento Di Alberi e Alloggiamenti Per Prestazioni OttimaligretaNessuna valutazione finora
- MAAM Lezione 03-05-2013 PDFDocumento64 pagineMAAM Lezione 03-05-2013 PDFLoredana MagdaNessuna valutazione finora
- Collegamenti Smontabili Non FilettatiDocumento84 pagineCollegamenti Smontabili Non Filettativito200049Nessuna valutazione finora
- Lavorazioni Di Fresatura - FilippiDocumento15 pagineLavorazioni Di Fresatura - FilippipaolinoluccaNessuna valutazione finora
- Catalogo Pignoni CoroneDocumento162 pagineCatalogo Pignoni CoronealessandroNessuna valutazione finora
- Ingranaggi Di PrecisioneDocumento8 pagineIngranaggi Di PrecisioneMarco MuratoreNessuna valutazione finora
- CefalometriaDocumento116 pagineCefalometriaSina MardukNessuna valutazione finora
- Relazione Costruzione Di MacchineDocumento21 pagineRelazione Costruzione Di MacchineFrancescoNessuna valutazione finora
- Trucheck - It Laboratorio Di Tecnologia Meccanica RelazioneDocumento7 pagineTrucheck - It Laboratorio Di Tecnologia Meccanica RelazioneGiuseppe ZaccoNessuna valutazione finora
- Collegamenti Smontabili Non FilettatiDocumento84 pagineCollegamenti Smontabili Non FilettatiAndrea CunatoNessuna valutazione finora
- Ingranaggi A Denti Dritti - TabellaDocumento5 pagineIngranaggi A Denti Dritti - TabellaMonica BoccaNessuna valutazione finora
- Cinghie Piatte e TrapezoidaliDocumento41 pagineCinghie Piatte e Trapezoidalidpiperis111867% (6)
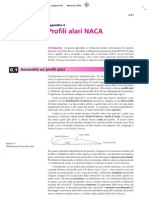
- Profili NACA PDFDocumento7 pagineProfili NACA PDFflystudio3dNessuna valutazione finora
- CuscinettoDocumento4 pagineCuscinettocaterinaNessuna valutazione finora
- Geometria C Unità 10Documento22 pagineGeometria C Unità 10Stu Tom Berton ChiaraNessuna valutazione finora
- Coppie Di Serraggio Husqvarna WR 125 06Documento7 pagineCoppie Di Serraggio Husqvarna WR 125 06Emanuele Dragone50% (2)
- StatCat 2010 01Documento352 pagineStatCat 2010 01ozkarchlNessuna valutazione finora
- 400.903 10 2079Documento386 pagine400.903 10 2079Óscar PereiraNessuna valutazione finora
- Solenoid Valve EF PDFDocumento4 pagineSolenoid Valve EF PDFLuis LopezNessuna valutazione finora
- Conflow 2600 AD PDFDocumento41 pagineConflow 2600 AD PDFjose mondacaNessuna valutazione finora
- Inst Tech - IDROMAT5 5e (04.14)Documento12 pagineInst Tech - IDROMAT5 5e (04.14)mahfoudNessuna valutazione finora
- Air Actuated Clutch/Brake Unit (Dry Running) : Gruppo Frizione/Freno A Comando Pneumatico Funzionamento A SeccoDocumento6 pagineAir Actuated Clutch/Brake Unit (Dry Running) : Gruppo Frizione/Freno A Comando Pneumatico Funzionamento A Seccosaul H QNessuna valutazione finora
- Carmix 3.5TTDocumento129 pagineCarmix 3.5TTcesarNessuna valutazione finora
- MT 655B 665BDocumento500 pagineMT 655B 665Barp76Nessuna valutazione finora
- ValbiaDocumento84 pagineValbiaapi-26356646Nessuna valutazione finora
- RR 20191001 PDFDocumento8 pagineRR 20191001 PDFvrider81Nessuna valutazione finora