Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Appunti Di Impianti Industriali M
Caricato da
Andrea ScazzieriTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Appunti Di Impianti Industriali M
Caricato da
Andrea ScazzieriCopyright:
Formati disponibili
UniBo
2016/2017
Impianti Industriali M
DISPENSA COMPILATA PER IL CORSO DELL’A.A 2016/2017
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -1-
Indice
Studio del prodotto ........................................................................................................................................... - 2 -
• Concetto di studio di fattibilità e sua suddivisione in 4 fasi .................................................... - 2 -
• Analisi e previsioni di mercato ...................................................................................................... - 2 -
• Componenti della domanda di mercato ....................................................................................... - 2 -
• Indagine campionaria con distribuzione normale (o gaussiana)............................................. - 3 -
Previsione della Domanda .............................................................................................................................. - 5 -
• Metodo della correlazione .............................................................................................................. - 5 -
• Estrapolazione ................................................................................................................................... - 5 -
• Metodo della media mobile e della media mobile pesata ........................................................ - 7 -
• Metodo dello smorzamento (o livellamento) esponenziale ..................................................... - 7 -
• Coefficienti d’errore: scarto quadratico medio, errore medio assoluto, errore relativo..... - 8 -
Studio del ciclo produttivo e degli impianti di produzione ..................................................................... - 9 -
• Dimensionamento di un sistema FMS ....................................................................................... - 13 -
• Dimensionamento di un buffer con la simulazione Montecarlo ........................................... - 13 -
• Livellamento della produzione con macchine tradizionali .................................................... - 14 -
• Valore economico di un’attrezzatura ......................................................................................... - 14 -
• Curva Caratteristica di Prodotto U e U* .................................................................................... - 15 -
• Cella produttiva .............................................................................................................................. - 18 -
• Dimensionamento con Modello Analitico ..................................................................... - 18 -
• Dimensionamento con Simulazione Numerica ............................................................. - 19 -
Assemblaggio .................................................................................................................................................. - 21 -
• Bilanciamento di linee di assemblaggio (Assembly Line Balancing, ALB) ..................... - 21 -
• Metodi esatti Patterson-Albracht (ALB1 e ALB2) ................................................................. - 22 -
• Metodi Euristici (LCR, KW, RPW) ........................................................................................... - 24 -
Analisi di redditività ...................................................................................................................................... - 28 -
• Flussi di cassa.................................................................................................................................. - 30 -
• Richiamo sul VAN e Pay back period ....................................................................................... - 31 -
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -2-
Studio del prodotto
• Concetto di studio di fattibilità e sua suddivisione in 4 fasi
Lo studio di fattibilità precede la fase di avvio di un progetto, e si articola in 4 fasi:
1. Studio del prodotto: conoscere il mercato, appetibilità del prodotto, progettazione del prodotto;
2. Studio del ciclo produttivo: stabilire il ciclo di produzione ed elaborare la distinta base;
3. Studio dei servizi: Impianti di servizio (acqua, luce, gas ecc);
4. Analisi della redditività: analisi economica.
• Analisi e previsioni di mercato
o Classificazione tecnica
▪ Indagini campionarie (approccio statistico);
▪ Metodi di correlazione (fra vendite e indicatori);
▪ Metodi di estrapolazione (previa conoscenza della serie storica).
o Classificazione temporale
▪ Breve termine: (<1 anno) Operatività quotidiana (es. quanti prodotti produrre nei
prossimi mesi);
▪ Medio Termine: (1-5 anni) Fattibilità del prodotto (es. valutare l’introduzione di un
nuovo prodotto sul mercato);
▪ Lungo Termine: (10-15 anni) Previsioni di Impianto (scelta di investire o meno nella
costruzione di un impianto, sono scelte di tipo strategico basate sullo studio del
mercato).
• Componenti della domanda di mercato
o Componente Determinatoria: Trend (tendenza del mercato), serve per previsioni di lungo
termine;
o Componente Oscillatoria:
▪ Congiuntura (1-5 anni, non dettata da eventi stagionali, es. guerre, incidenti o disastri
naturali che fanno variare la produzione in un paese). Valutare contemporaneamente
trend e congiuntura serve per previsioni di medio periodo;
▪ Stagionalità (1 anno, vendibilità legata al periodo dell’anno, es. piumino d’estate),
serve per previsioni di breve periodo,
▪ Casualità.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -3-
• Indagine campionaria con distribuzione normale (o gaussiana)
Lo studio della funzione Gaussiana nasce dal fatto che nelle indagini campionarie è impossibile
analizzare l’universo, quindi se ne studia un sottoinsieme detto campione. Del campione si calcolano
media e deviazione standard necessarie per costruire un intervallo in cui la variabile che stiamo
studiando cada con una certa probabilità.
o Universo
N m m
xi xj ∗ Fj
M=∑ =∑ = ∑ xj ∗ fj
N N
i=1 j=1 j=1
N m m
2 (x)
(xi − M)2 (xj − M)2
σ =∑ =∑ ∗ Fj = ∑(xj − M)2 ∗ fj
N N
i=1 j=1 j=1
N = numerosità dell′ universo;
M = valore medio universo;
xi = osservazione i − esima;
xj = osservazione j − esima;
Fj = frequenza assoluta tipologia di osservazione j − esima;
Fj
fj = = frequenza relativa;
N
σ = scarto quadratico medio o deviazione standard;
σ2 = varianza;
o Campione
n
xi ∗ Fi
x̅ = ∑
n
i=1
n
2 (x)
(xi − x̅)2 ∗ Fi
σ =∑
n
i=1
̅ = 𝑣𝑎𝑙𝑜𝑟𝑒 𝑚𝑒𝑑𝑖𝑜 𝑐𝑎𝑚𝑝𝑖𝑜𝑛𝑒; 𝒙𝒊 = 𝑜𝑠𝑠𝑒𝑟𝑣𝑎𝑧𝑖𝑜𝑛𝑒 𝑖 − 𝑒𝑠𝑖𝑚𝑎;
𝒙
𝒏 = 𝑛𝑢𝑚𝑒𝑟𝑜 𝑑𝑖 𝑜𝑠𝑠𝑒𝑟𝑣𝑎𝑧𝑖𝑜𝑛𝑖;
𝑭𝒊 = 𝑓𝑟𝑒𝑞𝑢𝑒𝑛𝑧𝑎 𝑎𝑠𝑠𝑜𝑙𝑢𝑡𝑎 𝑡𝑖𝑝𝑜𝑙𝑜𝑔𝑖𝑎 𝑑𝑖 𝑜𝑠𝑠𝑒𝑟𝑣𝑎𝑧𝑖𝑜𝑛𝑒 𝑖 − 𝑒𝑠𝑖𝑚𝑎;
𝝈 = 𝑠𝑐𝑎𝑟𝑡𝑜 𝑞𝑢𝑎𝑑𝑟𝑎𝑡𝑖𝑐𝑜 𝑚𝑒𝑑𝑖𝑜 𝑜 𝑑𝑒𝑣𝑖𝑎𝑧𝑖𝑜𝑛𝑒 𝑠𝑡𝑎𝑛𝑑𝑎𝑟𝑑; 𝝈𝟐 = 𝑣𝑎𝑟𝑖𝑎𝑛𝑧𝑎
o Intervallo
Pr{𝑥̅ − ∆ ≤ 𝑀 ≤ 𝑥̅ + ∆} ≈ 𝑓(𝑘)
Pr = probabilità che il valore medio dell’universo si trovi in un certo intervallo
f(k) = affidabilità della risposta (per k = 1,2,3 → f(k) = 67%, 95%, 99.5%)
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -4-
• Indagine campionaria con distribuzione binomiale
La distribuzione binomiale descrive fenomeni per cui la risposta è di tipo sì/no:
n!
Pr(α) = (na) ∗ pα ∗ qn−α = (n−α)! ∗ pα ∗ qn−α
∗ α!
p = probabilità che la risposta sia positiva (supero il test, un oggetto non è rotto ecc)
q = 1 - p = probabilità che la risposta sia negativa (non supero il test, l’oggetto è rotto ecc)
n = numero di osservazioni totali
α = numero di osservazioni della risposta positiva (max 4 errori per superare esame -> α=4)
Pr{𝑝′ − ∆ ≤ 𝑀 ≤ 𝑝′ + ∆} ≈ 𝑓(𝑘)
Pr = probabilità che il valore medio dell’universo si trovi in un certo intervallo
f(k) = affidabilità della risposta (per k = 1,2,3 → f(k) = 67%, 95%, 99.5%)
∑p
p’ = media del campione =
n
q’ = 1-p’
• Intervallo di confidenza Δ (scostamento dalla media)
Sottratto e sommato alla media va ad identificare rispettivamente i due valori xinf e xsup entro i quali
la variabile che stiamo studiando cade con una certa probabilità.
Gaussiana (Normale) Binomiale
σcampione p′ ∗ q′
∆= k ∗ ∆= k√
√n − 1 n−1
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -5-
Previsione della Domanda
• Metodo della correlazione
Il metodo della correlazione lega le vendite del prodotto ad un indicatore economico noto
avendo a disposizione lo storico delle vendite e dell’indicatore. Nel corso abbiamo analizzato
in particolare il caso lineare, ovvero la correlazione lineare con una funzione retta per
descrivere il legame x-y (x: indicatore economico noto, y: previsione di vendita/domanda di
mercato incognita). La correlazione consiste nel ricavare la retta avendo a disposizione i dati
storici di x e y per poter effettuare delle previsioni.
n n n
yi (yi − y̅)(xi − x̅) Δy ∗ Δx
a = ∑ = y̅ ; b=∑ 2
=∑ ;
n (xi − x̅) (Δx)2
i=1 i=1 i=1
𝐑𝐞𝐭𝐭𝐚 𝐝𝐢 𝐜𝐨𝐫𝐫𝐞𝐥𝐚𝐳𝐢𝐨𝐧𝐞 → y = a + b(x − x̅)
Coefficiente di correlazione R (-1<R<1; correlazione inversa \, nulla --, e diretta /):
(yi − y̅)(xi − x̅) Δy ∗ Δx
R= =
∑ni=1(xi − x̅)2 √∑ni=1(yi − y̅)2 ∑ni=1 Δx 2 √∑ni=1 Δy 2
n∗√ ∗ n∗√ ∗
n n n n
In generale, se |R|≥0.7, c’è correlazione.
• Estrapolazione (ricerca della domanda futura analizzando il passato)
o Analisi della serie storica (isolare la stagionalità attraverso l’analisi di dati storici)
Grandezze considerate:
▪ Deterministiche
o Trend (10-15 anni) ( xt )
o Oscillatorie
▪ Congiuntura (1-5 anni) ( xt )
▪ Stagionalità (<1 anno) ( yt )
▪ Casuali ( zt )
Domanda di mercato ut (indice grezzo):
▪ ut = xt*yt*zt; Forma Moltiplicativa
▪ ut = xt+yt+zt; Forma Additiva
▪ ut = xt*yt+zt; Forma mista 1 (useremo questa)
▪ ut = xt*zt+yt; Forma mista 2
▪ ut = xt+yt*zt; Forma mista 3
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -6-
Individuato l’indice grezzo ut, seguono 4 passaggi:
1. Correzione indice grezzo ut:
▪ ut corretto = ut ∗ g t
W0
▪ gt = = coefficiente di correzione
Wt
Wt
▪ w0 = ∑12
t=1 = n° medio di giorni lavorativi all’anno
12
▪ wt = n° giorni lavorativi al mese
2. Perequazione delle medie mobili (utilizzo ripetuto delle medie mobili)
uk
▪ u̅t+1,t = ∑t+6
k=t−5 12
= media mobile primaria
̅t+1,t +u
u ̅t,t−1
▪ u̿t =
2
= media mobile secondaria
u̿t ≃ xt
t-1 t+1 t+3
t-2 t t+2
3. Indici di stagionalità
ut zt
▪ ̿̿̿t
u
≃ yt +
xt
= Y′t
Y′t
▪ m = ∑12
t=1 12
Y′
▪ Yt =
m
t
= Indice di stagionalità rettificato
i = indice mese
Yij con {
j = indice anno
y′ij−2 +2y′ij−1 +3y′ij +2y′ij+1 +y′ij+2
▪ y′ij =
1+2+3+2+1
= somma pesata
4. Destagionalizzazione
(xt ∗yt ) zt zt
▪ Metodo A (poca stagionalità): ut,destag =
yt
+
yt
≃ xt +
yt
▪ Metodo B: ut,destag = xt + zt
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -7-
• Metodo della media mobile e della media mobile pesata (entrambe per brevi periodi)
Media mobile: prendiamo i dati di un determinato periodo e ne calcoliamo la media sommandoli fra
loro e dividendo per il numero totale di dati. Questo tipo di media però assegna la stessa importanza
ad ogni singolo dato, ad esempio in una media mobile a 100 periodi l'ultimo valore ha la stessa
importanza del primo
∑𝑛𝑘=1 𝑑𝑡−𝑘+1
𝐷𝑡+1 =
∑𝑛𝑘=1 𝑘
Media mobile pesata: prendiamo i dati di un determinato periodo, ogni dato viene moltiplicato per
un peso (un valore intero ad esempio 1, 2, 3, 4…) sempre minore quanto più ci si allontana dal
periodo attuale. Si calcola la media sommando i dati dei periodi moltiplicati per i rispettivi pesi e
dividendo per la somma dei pesi. In questo modo si attribuisce più importanza ai dati più recenti e
meno a quelli più lontani nel tempo
∑𝑛𝑘=1 𝑃𝑘 ∗ 𝑑𝑡−𝑘+1
𝐷𝑡+1 =
∑𝑛𝑘=1 𝑃𝑘
• Metodo dello smorzamento (o livellamento) esponenziale
Rappresenta una media mobile pesata dove il peso dato ai fattori della serie storica decresce con
legge esponenziale.
α=0 significa che la domanda prevista nel periodo t è uguale a quella prevista per il periodo
precedente t-1, mentre se α=1 la domanda prevista al periodo t è uguale a quella effettiva per il
periodo precedente.
𝐷𝑡+1 = 𝛼 ∗ 𝑑𝑡 + (1 − 𝛼) ∗ 𝐷𝑡
Dt+1 = domanda prevista
dt = domanda vera
α = valore dato in funzione del mercato, compreso fra 0 e 1
α = 0.1-0.15 in un mercato stazionario
α = 0.5 in un mercato non-stazionario (es. mercato tecnologico)
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -8-
• Coefficienti d’errore: scarto quadratico medio, errore medio assoluto, errore relativo
Misurano la bontà di un metodo previsionale basato su una serie storica di dati, o per confrontare tra
loro diversi metodi previsionali I coefficienti k1 e k2 danno un’indicazione sulla bontà della
previsione, mentre con k3 si evince se si sta sovrastimando o sottostimando.
𝑛
(𝑑𝑡 − 𝐷𝑡 )2
𝑘1 = ∑ ; 𝐸𝑟𝑟𝑜𝑟𝑒 𝑜 𝑆𝑐𝑎𝑟𝑡𝑜 𝑞𝑢𝑎𝑑𝑟𝑎𝑡𝑖𝑐𝑜 𝑚𝑒𝑑𝑖𝑜
𝑛
𝑡=1
𝑛
|𝑑𝑡 − 𝐷𝑡 |
𝑘2 = ∑ ; 𝐸𝑟𝑟𝑜𝑟𝑒 𝑚𝑒𝑑𝑖𝑜 𝑎𝑠𝑠𝑜𝑙𝑢𝑡𝑜
𝑛
𝑡=1
Questi indici non si possono applicare al futuro ma misurano la bontà di un metodo basato su una serie
storica di dati (o per confrontare tra loro metodi previsionali). k1 e k2 hanno stesso andamento (se k1
è piccolo lo è per forza anche k2), k1 (o k2) →0 indica che la stima è molto vicina alla realtà.
𝑛
(𝑑𝑡 − 𝐷𝑡 )
𝑘3 = ∑ ; 𝐸𝑟𝑟𝑜𝑟𝑒 𝑟𝑒𝑙𝑎𝑡𝑖𝑣𝑜
𝑛
𝑡=1
Quest’ultimo indice non va bene per capire se un metodo previsionale sia buono o meno perché ci dice
solo se tale metodo sovrastima o sottostima la realtà, in particolare se k3>0 (d>D) si ha una sottostima
della realtà mentre per k3<0 (d<D) si ha una sovrastima della realtà.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 -9-
Studio del ciclo produttivo e degli impianti di produzione
• Analisi P-Q e lay-out aziendale
o Zona 1: Produzione in linea (layout per prodotto)
Pochi prodotti e in quantità elevate; tipico dei prodotti industriali; layout ben distinto dove si
notano le varie zone di produzione del singolo prodotto; prodotti standard perciò bassa
personalizzazione
o Zona 2: Produzione per reparti (layout per processo)
Molti prodotti e di qualità inferiore rispetto alla zona 1; prodotti artigianali; Installare una
linea per ogni prodotto è una scelta controproducente; elevata personalizzazione
o Zona 3: Produzione mista linea e reparti (layout misti) (Group Technology)
Quest’ultimo layout prevede l’impiego di macchinari uguali tra loro (studio del modello
analitico) o differenti (simulazione numerica), hanno volumi di produzione intermedi tra
linea e reparti con un buon livello di personalizzazione. Possono essere utilizzati anche i
sistemi FMS (Flexible Manufacturing System).
• Concetto di scarto e rendimento η di una stazione produttiva
o Rendimenti
▪ k1 = 1 - S = Rendimento di scarto
▪ S = s*Qi (Scarti = % dipendente dalla tecnologia * Produttività in ingresso)
▪ k2 = Rendimento dell’operatore
▪ k3 = Affidabilità del macchinario = Uptime / (Uptime+Downtime)
▪ k4 = Coefficiente di utilizzo = Production Time / Uptime
k1 genera scarti, k2 k3 e k4 generano fermi macchina e quindi una mancata
produzione.
▪ η = Rendimento totale = k1*k2*k3*k4
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 10
-
• Produzione in linea (senza buffer (sincrona) e con buffer (asincrona))
o Linea sincrona (risente di tutte le inefficienze, infatti si usa 𝜂𝑗 )
𝑞𝑢
𝑞𝑗 = = produzione stazione prima dell’uscita
𝜂𝑗
𝑞𝑗 ∗𝑡𝑗
𝑛𝑗 = = numero macchine j-esima stazione
60
qi
qu
q1 q2 q3
o Linea asincrona (non risente delle inefficienze gestionali k2, k3, k4)
𝑞𝑢
𝑞𝑗 = = produzione stazione prima dell’uscita
𝑘1,𝑗
𝑞𝑗 ∗𝑡𝑗
𝑛𝑗 = = numero macchine j-esima stazione
60∗𝜂𝑗
qi
q1 b1 q2 b2 q3 qu
Il valore della q in ingresso in q3 può essere diverso da quello in uscita da q2 a seconda della
strategia scelta. Seguendo ad esempio la strategia “Just In Time”, q3 verrà rifornita della q
richiesta nel momento in cui ne ha effettivamente bisogno, senza creare cosi delle eccedenze di
materiali.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 11
-
• Produzione per reparti
Esempio: Studio della seguente linea di produzione per reparti
Sono noti q1, q2, q3, N, ore turno. [pz/mese; gg/mese; h]
Tempo di lavorazione [s/pz] Rendimenti Sequenza di produzione
P1 P2 P3 k1 k2k3k4 P1 P2 P3
A 30 / 80 0.95 0.92 A C B
B 40 / 50 0.95 0.88 B D A
C / 60 90 0.80 0.88 D C
D 60 45 / 0.90 0.70 8000 12000 5000
o Produttività per stazione:
Es: Prodotto 1, Reparti A, B, D →
qP1,D qP1,B
qP1,uscita = qP1,D = 8000 → qP1,B = → qP1,A =
k1D k1B
o Numero di macchine per reparto (A, B, C, D)
n
qij ∗ t ij qPi,Si ∗ t Pi,Si qP1,A ∗ t P1,A
Mj′ =∑ = → Es: MA′ =
60 ∗ ηj 60 ∗ ηSi 60 ∗ ηA
i=1
i = prodotto (indicato con ad es. 1, 2, 3, ..., i oppure P1, P2, P3, …, Pi)
j = stazione produttiva (Si)
t = tempo di lavorazione del prodotto i nella stazione j
q = quantità di pezzi da lavorare del prodotto i nella stazione j
𝜂 = rendimenti delle stazioni
o Tempo trascorso dai prodotti nei reparti
Es: Linea A → Qui vengono lavorati i prodotti P1 e P3
qP1,A ∗tP1,A qP3,A ∗tP3,A
TP1,A = [h/mese]; TP3,A = [h/mese] → Ttot = TP1,A + TP3,A
3600 3600
TP1,A TP3,A
%P1A = ; %P3A =
Ttot Ttot
o Costo dei pezzi, necessario per formare il prezzo finale
Sono noti C macch , n, i
n
(1+i) ∗i ′ ′ ′
[ n ]∗[(%P1A ∗MA ∗C macch,A )+(%P1B ∗MB ∗C macch,B )+(%P1D ∗MD ∗C macch,D )]
(1+i) −1
̅ P1 =
Es: C
qP1,uscita ∗ t effettivo di lavoro
• Costo al pezzo dei macchinari:
s ∗ C𝑡𝑜𝑡 𝑚𝑎𝑐𝑐ℎ𝑖𝑛𝑒 (1 + i)n ∗ i 1 S
𝐂𝐮 = = ( ∗ ∑(Cmacch j ∗ n° macch j )) ∗ =
Qu (1 + i)n − 1 Qu Qu
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 12
-
• Richiamo influenza del tempo sui costi
Il valore di un € oggi è diverso da quello che avrà domani, perciò nello studio di un impianto di
produzione è molto importante attualizzare i costi. L’attualizzazione dei costi è possibile conoscendo
il tasso di interesse i e la vita utile delle attrezzature. Grazie a questi due parametri è possibile calcolare
il coefficiente di ammortamento s:
(1+𝑖)𝑛 ∗𝑖
𝑠= = Coefficiente di ammortamento
(1+𝑖)𝑛 −1
o Ammortamento a rata costante (economico)
𝑆 (𝑜 𝐴) = 𝑠 ∗ 𝑉𝑜 = Rata annua (Costante) di Ammortamento
Se l’impianto a fine vita (anno n) ha un valore residuo, l’espressione prende la seguente forma:
𝑉𝑟
𝑆 (𝑜 𝐴) = 𝑠 ∗ (𝑉𝑜 − ) = Rata annua (Costante) di ammortamento con valore residuo Vr
(1+𝑖)𝑛
Periodo S = Ii+qi Ii qi Vr
Componente Interessi Componente Capitale
1 S I1 = V0 *i q 1 = S – I1 Vr1 = V0 - q1
2 S I2 = Vr1*i q2 = S- I2 Vr2 = Vr1 – q2
3 S I3 = … q3 = … Vr3 =…
… … … … …
n S In = … qn = … ~0
▪ V0= Investimento iniziale o Valore iniziale del bene;
▪ Vr = valore residuo dopo n anni;
▪ n = vita utile del bene;
▪ i = tasso di interesse (OCC, Opportunity Capital Cost)
o Attualizzazione
Fk
Fk′ =
(1 + i)n
Fk = flusso di cassa anno k-esimo
Fk’ =flusso di cassa anno k-esimo attualizzato
i = OCC = WACC = tasso di interesse
n = anno
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 13
-
• Dimensionamento di un sistema FMS
∑ Qi ∗ ti pezzi i all′ anno ∗ t prod i
n° macchineFMS = =
N ∗ h macchine ∗ 60 ∗ ηFMS gg tot ∗ ore macchine al g ∗ 60 ∗ efficienza
Q i ∗ n° piazzamentii n° di giorni di produzione richiesti
n° pallet = (∑ )∗
Capacità Pallet N
Tempo di piazzamento totale + Tempo di carico/scarico totale
n° operatoriFMS =
N ∗ h turno ∗ 60 ∗ ηOP
t piazzamento tot = (∑ Q i ∗ n° piazzamentii ) ∗ t piazzamento
Q i ∗ n° piazzamentii
t carico/scarico tot = (∑ ) ∗ t carico/scarico
Capacità Pallet
• Dimensionamento di un buffer con la simulazione Montecarlo
Il metodo Montecarlo è una simulazione numerica basata sull’utilizzo di numeri casuali grazie ai quali
è possibile rappresentare qualsiasi fenomeno aleatorio. Il comportamento casuale delle variabili del
sistema viene rappresentato dall’estrazione casuale dei numeri.
Tale metodo può essere utilizzato anche per il dimensionamento di un buffer, procedimento che
consiste nel fare in modo che esso abbia una capienza sufficiente alle necessità, ovvero deve avere una
dimensione tale da poter sopportare un’oscillazione del proprio livello di riempimento compresa tra
valore massimo e minimo raggiungibili. La determinazione di tale oscillazione si effettua a partire
dalla simulazione del comportamento delle stazioni di lavoro immediatamente a monte e a valle del
buffer, che si effettua applicando il metodo Montecarlo.
La stazione di lavoro a monte del buffer accumula pezzi in esso, quella a valle li preleva. Tuttavia non
è possibile prevedere quando una stazione sta lavorando e quando no (ad esempio ferma a causa di un
guasto), tali comportamenti sono soggetti ad aleatorietà, e proprio per questo che si utilizza il metodo
Montecarlo.
Grazie ad una simulazione numerica si ottengono i livelli di riempimento massimo e minimo e la
dimensione del buffer è proprio pari alla differenza tra il primo ed il secondo valore.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 14
-
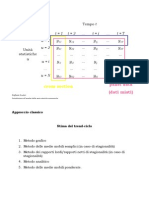
• Livellamento della produzione con macchine tradizionali
Livellare la produzione significa valutare quanti lotti e quanti prodotti per lotto sono in grado di
produrre tra un setup e l’altro, il tutto considerando le quantità richieste dal mercato.
Considerando il numero di macchine tradizionali da integrare nel sistema FMS e l’arrotondamento
implicito nel loro dimensionamento:
▪ 𝐭 𝐥𝐢𝐛𝐞𝐫𝐨 𝐌𝐓 (MT = macchina tradizionale) = t disp ∗ η ∗ scarto arrotondamento per eccesso
▪ 𝐧° 𝐥𝐨𝐭𝐭𝐢 = t libero MT / t setup sequenza
(tempo setup sequenza vuol dire che devo sommare i tempi di tutti i setup che sono eseguiti
durante la produzione di un lotto)
▪ 𝐧° 𝐥𝐨𝐭𝐭𝐢 𝐩𝐞𝐫 𝐮𝐧 𝐩𝐫𝐨𝐝𝐨𝐭𝐭𝐨 = Q ∗ (n° MT / n° lotti prodotto)
▪ 𝐧° 𝐩𝐞𝐳𝐳𝐢 𝐩𝐞𝐫 𝐥𝐨𝐭𝐭𝐨 = Q / (n° effettivo di MT ∗ n° di lotti)
(Q è la quantità annua di prodotti che voglio produrre in lotti quindi se ho 3 prodotti differenti
devo calcolare 3 volte questo valore (e ovviamente tutti quelli soprastanti))
▪ 𝐭 𝐫𝐞𝐚𝐥𝐢𝐳𝐳𝐚𝐳𝐢𝐨𝐧𝐞 𝐥𝐨𝐭𝐭𝐨 𝐩𝐞𝐫 𝐮𝐧 𝐩𝐫𝐨𝐝𝐨𝐭𝐭𝐨 = n° pezzi per lotto ∗ (t macchina +
t operatore) ∗ fattore conversione temporale
(tempo macchina è il tempo necessario per la lavorazione del pezzo nella macchina
tradizionale mentre tempo operatore è il tempo richiesto all’operatore per le sole operazioni
di carico-scarico)
• Valore economico di un’attrezzatura
Avendo nel parco macchine un certo impianto, già ripagato, si valuta se convenga sostituirlo con uno
nuovo che garantisca maggiore efficienza espressa in termini di CTSR (costo teorico servizio reso).
Il CTSR è il costo annuale che si deve sostenere per far funzionare un’attrezzatura produttiva, quali
ad esempio energia, materie prime, materiale di manutenzione, personale di manutenzione, perdite
dovute a scarti, perdite per inattività.
𝐶𝑇𝑆𝑅 𝑉𝑟 𝐶𝑇𝑆𝑅′ 𝑉′𝑟
𝑉 = (𝐶0 + ∑ − ) − (∑ − )
(1 + 𝑖)𝑘 (1 + 𝑖)𝑛 (1 + 𝑖)𝑘 (1 + 𝑖)𝑛
𝑜𝑝𝑝𝑢𝑟𝑒, 𝑠𝑒 𝑙𝑎 𝑟𝑎𝑡𝑎 𝑑𝑖 𝑎𝑚𝑚𝑜𝑟𝑡𝑎𝑚𝑒𝑛𝑡𝑜 è 𝑐𝑜𝑠𝑡𝑎𝑛𝑡𝑒:
(1 + 𝑖)𝑘 ∗ 𝑖 𝑉𝑟 ′
(1 + 𝑖)𝑘 ∗ 𝑖 𝑉′𝑟
𝑉 = [𝐶0 + (𝐶𝑇𝑆𝑅 ∗ ) − ] − [(𝐶𝑇𝑆𝑅 ∗ ) − ]
(1 + 𝑖)𝑘 − 1 (1 + 𝑖)𝑛 (1 + 𝑖)𝑘 − 1 (1 + 𝑖)𝑛
= 𝐶𝑡𝑜𝑡 𝑚𝑎𝑐𝑐ℎ 𝑛𝑢𝑜𝑣𝑎 − 𝐶 𝑚𝑎𝑐𝑐ℎ 𝑣𝑒𝑐𝑐ℎ𝑖𝑎
Se V è ≥ 0, non conviene cambiare macchinario, invece se è < 0 sì.
(1 + 𝑖)𝑘 = 𝑠 ; CTSR= costo teorico servizio reso
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 15
-
• Curva Caratteristica di Prodotto U e U*
La curva caratteristica è uno strumento che ci permette di valutare se sia conveniente produrre per
reparti o in linea.
Si distinguono due curve, la curva caratteristica vera e propria (U) e quella in valore, che in aggiunta
alla prima considera anche il valore economico dei reparti:
o Curva caratteristica U
q ∗ ti
∑ni=1 ui ∗ ni ni ∑ni=1 ∗ ni
60 ∗ ηi ∗ ni
U= n , ma ui = = n →
∑i=1 ni ⌈n⌉ ∑i=1 ni
n ti
q ∑i=1 ηi
𝐔= =q∗A
60 ∑ni=1 ni
U
o Curva caratteristica in valore U*
t ∗c
∑ni=1 i i A
q ηi
𝐔∗ = = q ∗ A∗
n
60 ∑i=1(ni ∗ ci ) q
ηi ∗60
qi s = = produttività massima (cioè di saturazione) che una sola macchina di tipo i può
ti
realizzare
U = grado di saturazione dei macchinari; n = n° di stazioni; ni = n° di macchine stazione i-
esima
𝑞∗𝑡𝑖 1
ui = coefficiente utilizzo stazione i-esima = ( )∗
60∗𝜂𝑖 𝑛𝑖
q = produzione della linea; ti = tempo di ciclo stazione i-esima
U
100
k4
0 q
La curva caratteristica ha un andamento detto a dente di sega e tutte le rette passano per l’origine.
I denti di sega sono dati dalle discontinuità dovute al raggiungimento della produzione di saturazione
e la conseguente aggiunta di un macchinario. Più aumentano i macchinari minore è il salto di
discontinuità del dente).
Ci viene fornito il grado di utilizzo della linea (k4 o U_rep ecc), che rappresentiamo come retta
orizzontale nel grafico U-qs, dall’intersezione tra questa retta e la curva caratteristica (semplice o in
valore) risaliamo alla produzione al di sotto della quale è conveniente la produzione per reparti e al
di sopra in linea.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 16
-
Esempio:
Data una linea di produzione e le efficienze e tempo per l’i-esima stazione, tracciare la curva
caratteristica U, ed esprimere delle considerazione su un passaggio da produzione in linea a
produzione per reparti. Produzione [0-50]pz/h; k4 reparti = 40%
qi qu
q1 q2 q3 q4
1 2 3 4
ti 1.5 3 2 4
ηi 1 1 1 1
ηi ∗60 1∗60
• qi s = 𝑞1𝑠 = = 40; 𝑞2𝑠 = 20; 𝑞3𝑠 = 30; 𝑞4𝑠 = 15
ti 1.5
• Compilo la tabella per vedere l’andamento del numero delle macchine e di U
q n1 n2 n3 n4 U
0 1 1 1 1 0
15- 1 1 1 n4 è saturo1* 15 (1.5 + 3 + 2 + 4)
∗ = 66%
60 (1 + 1 + 1 + 1)
15+ 1 1 1 +1 macchina 2 15
∗
10.5
= 53%
60 (1 + 1 + 1 + 2)
20- 1 1* 1 2 20 10.5
∗ = 70%
60 5
20+ 1 2 1 2 20 10.5
∗ = 58%
60 6
30- 1 2 1* 2* …
30+ 1 2 2 3 …
40- 1* 2* 2 3 …
40+ 2 3 2 3 …
• Disegnare il grafico U-q (visto nella precedente pagina)
• Calcolare la q oltre la quale conviene la produzione in reparti:
k4
U = q ∗ A → analizzo il punto in cui U = k4 → k4 = q ∗ A → q =
→ determino A:
A
U15− 0.66 k4 0.4
A= = = 0.044 → sostiuisco e calcolo q → q = = = 9.09 pz/h
q1 15 A 0.044
Se si dispone di 4 macchine (somma n fila 15-) e la produzione è inferiore a 9.09 pz/h, conviene
passare ad una produzione per reparti.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 17
-
• Programmazione lineare per l’ottimizzazione della produzione
La programmazione lineare è una delle tecniche della ricerca operativa utilizzabile nella progettazione
degli impianti industriali. Un problema è detto lineare se sia i vincoli che la funzione obiettivo sono
lineari.
A livello operativo, un problema di programmazione lineare consiste nel tracciare delle rette che
rappresentano i vincoli del problema (la difficoltà sta nell’identificazione dei vincoli). Le rette sono in
realtà delle disequazioni grazie alle quali si ottiene nel grafico un dominio entro il quale possiamo
scegliere la produzione ammissibile.
Bisogna quindi scrivere una funzione obiettivo e massimizzarla o minimizzarla in base al tipo di
funzione stessa.
Esempio:
F.O. = 4x+2y-8;
Vincoli: 2x+3y+8<=20; 6x+2y<=12; x>0; y>=0
I vari vertici del polígono avranno coordinate (x, y), e sostituendo queste nella F.O. si individua il
punto di massimo, ovvero quello che massimizza (o minimizza) la funzione obiettivo.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 18
-
• Cella produttiva
Le Celle produttive rappresentano una via di mezzo tra produzione in linea e per reparti e possono
essere costituite da macchinari uguali tra loro o differenti. I volumi di produzione sono intermedi tra
linea e reparti e la customizzazione del prodotto è buona (ma inferiore rispetto ai reparti).
o Dimensionamento Celle
1. Macchine Uguali → Modello Analitico
2. Macchine Diverse → Simulazione Numerica
1. Modello Analitico
o a = tempo di ciclo comune macchina+operatore (es. carico/scarico) [min/pz]
o t = tempo di ciclo macchina (la macchina non ha bisogno dell’operatore) [min/pz]
o b = tempo di ciclo operatore (macchina libera, solo l’operatore è impegnato) [min/pz]
▪ Macchina impegnata nel tempo a+t
▪ Operatore impegnato nel tempo a+b
𝑎+𝑡
𝑛′ = = 𝑁𝑢𝑚𝑒𝑟𝑜 𝑡𝑒𝑜𝑟𝑖𝑐𝑜 𝑑𝑖 𝑚𝑎𝑐𝑐ℎ𝑖𝑛𝑒 𝑢𝑔𝑢𝑎𝑙𝑖 𝑑𝑒𝑙𝑙𝑎 𝑐𝑒𝑙𝑙𝑎
𝑎+𝑏
𝑎+𝑡 >𝑎+𝑏
Se ad esempio ottengo un numero di macchine non intero, ad es. 4.5, devo valutare se conviene
arrotondare per difetto o impiegarne una in più. Per sapere quale scelta conviene fare, si
calcola il costo per pezzo 𝑐̅ e si vede in quale caso è minore, rispondendo quindi alla domanda
“chi ha il 𝑐̅ minore?”.
m m+1
𝑇𝑐 𝑎+𝑡 (𝑎 + 𝑏)(𝑚 + 1)
𝐼𝑜𝑝 (𝑎 + 𝑡) − (𝑎 + 𝑏)𝑚 /
𝐼𝑚 / (𝑎 + 𝑏)(𝑚 + 1) − (𝑎 + 𝑡)
𝑚 ∗ 𝐶𝑚 + 𝐶𝑜𝑝 (𝑚 + 1) ∗ 𝐶𝑚 + 𝐶𝑜𝑝
𝑐̅ 1 1
𝑚∗ (𝑚 + 1) ∗
𝑎+𝑡 (𝑎 + 𝑏)(𝑚 + 1)
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 19
-
2. Simulazione Numerica
o Carta Uomo-Macchina o Robot-Macchina
o Si costruisce il flusso di tempo e ci si ferma appena si identifica la prima
ripetizione:
a = Tc comune, t = Tc macchina, b = Tc operatore
Es. tempo di carico e scarico = a
tempo di viaggio e ispezione = b
tempo di lavoro = t
o Calcolo il Tc totale
60
o Produttività oraria 𝑞𝑀 𝑖 = ∗ 𝑛° 𝑐𝑖𝑐𝑙𝑖𝑀 𝑖 [pz/h]
𝑇𝑐
o Coefficienti di utilizzo:
𝑎+𝑡 ∑(𝑎𝑖 + 𝑏𝑖 )
𝑢𝑚 𝑖 = 𝑢𝑜𝑝 =
𝑇𝑐 𝑡𝑜𝑡 𝑇𝑐 𝑡𝑜𝑡
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 20
-
o Metodo Montecarlo
Il metodo montecarlo si basa sull’uso di numeri casuali, poiché il loro uso assicura una
distribuzione uniforme di probabilità.
Ad esempio, posso simulare il numero medio di arrivi di mezzi in una stazione di servizio:
n° min Freq. Ass. i Freq. Ass. Tot Intervallo
arrivi al minuto Frequenza f(x) F(x) I
Assoluta
890 0-(287-1)
∗ 100 0 + 28.7
0 890 3100 0-286
= 28.7%
= 28.7%
1 1120 36.2% 64.9% 287-648
2 600 19.4% 84.3% 649-842
3 370 11.9% 96.2% 843-961
4 120 3.8% 100% 962-999
100%
3100
(con arrotondamenti)
0∗890+1∗1120+2∗600+3∗370+4∗120
Arrivi medi al minuto: x̅ = = 1.26 arrivi/minuto
3100
Grafico F(x)-x(eventi):
F(x)
100 100
96.2
84.3
64.9
50
28.7
0 1 2 3 4 x (Eventi)
Più è alto un gradino, più è probabile che un numero ci caschi dentro.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 21
-
Assemblaggio
• Bilanciamento di linee di assemblaggio (Assembly Line Balancing, ALB)
Per ogni linea è assegnato un tempo ciclo Tc, tempo necessario per il completamento di un prodotto.
Il bilanciamento di una linea consiste nel distribuire i vari TASK (operazioni che l’operatore deve
svolgere sul prodotto) tra le STAZIONI in modo che queste ultime siano caricate con un tempo Tk
(dove k rappresenta la k-esima stazione) inferiore a Tc (deve essere valido per ogni stazione!).
Il bilanciamento della linea è tanto migliore quanto più i tempi Tk sono vicini a Tc, ed è importante
cercare di equidistribuire i tempi dei task in modo da avere le stazioni con all’incirca lo stesso grado
di utilizzo e non stazioni completamente sature ed altre con molto tempo libero.
t
Tc
Tk Situazione
iniziale
Obiettivo
1 2 3 k m Stazioni
Il bilanciamento delle linee può essere effettuato con due tipologie di metodi:
1. Metodi ESATTI: ALB1 e ALB2 proposti da Patterson e Albracht
2. Metodi EURISTICI: Largest-Candidate Rule (LCR), Kilbridge and Wester Method (KWM),
Ranked Positional Weights (RPW)
I metodi Euristici sono “Metodi basati sulla logica e sul buon senso anziché su dimostrazioni
matematiche. Non garantiscono una soluzione ottima ma ne danno molto probabilmente alcune
che si avvicinano ad esse”
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 22
-
• Metodi esatti Patterson-Albracht (ALB1 e ALB2)
La rappresentazione grafica dei vincoli di precedenza da soddisfare per eseguire l’assemblaggio di un
generic prodotto è chiamata “Rappresentazione a Nodi e Archi”.
I nodi rappresentano I task, mentre gli archi rappresentano I vincoli di precedenza fra due task.
Un task può essere eseguito solo se tutti i precedenti task sono stati completati.
Le Earliest e Latest Station, rispettivamente Ej ed Lj, sono la prima e l’ultima stazione alla quale
un’attività (task) j può essere assegnata. Ej ed Lj dipendono dai predecessor e successori del task j.
Earliest Station Ej Latest Station Lj
𝑡𝑗 + ∑𝑘 ∈ 𝑃𝑗∗ 𝑡𝑘 𝑡𝑗 + ∑𝑘 ∈ 𝐹𝑗∗ 𝑡𝑘
⌈ ⌉ 𝑚+1−⌈ ⌉
𝑇𝑐 𝑇𝑐
Indici di performance (KPI, “Key Performance Index”)
• j = indice task da 1 a n
• k = indice stazione da 1 a m
Station Excess SE Line Efficiency LE
Differenza fra il numero reale di stazioni dopo il bilanciamento, e Rapporto fra il tempo totale di assemblaggio richiesto da tutti
il valore minimo di stazioni i task, e il tempo totale disponibile in ogni stazione
∑𝑛𝑗=1 𝑡𝑗 ∑ 𝑡𝑗
𝑚 − 𝑚𝑚𝑖𝑛 = 𝑚 −
𝑇𝑐 𝑚 ∗ 𝑇𝑐
Balance Delay BD Smoothness Index SI
Tempo di ozio totale della linea di assemblaggio, somma dei tempi Misura dell’equità dell’assegnazione dei task a tutte le
di ozio di ogni stazione k stazioni
𝑚
𝑚
∑ 𝐼𝑘 = 𝑇𝑐 − ∑ 𝑡𝑗
𝑘=1 𝑗∈𝑘
√∑(𝑇𝑐 𝑚𝑎𝑥 − 𝑇𝑘 )2
𝑘=1
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 23
-
Metodi di Bilanciamento
ALB 1 ALB 2
minimizzare n° stazioni minimizzare Tc (cioè massimizzare Q e
dato il n° max di stazioni utilizzabili minimizzare SI) noto n° stazioni usate
Funzione Obiettivo 𝑚𝑖𝑛 (∑ 𝑘 ∗ 𝐴𝑘 ) 𝑚𝑖𝑛(𝑀)
𝑘=1
𝐿𝑗 𝑚
Vincolo di Unicità ∑ 𝑥𝑗𝑘 = 1 ∑ 𝑥𝑗𝑘 = 1
(1! Stazione per task)
𝑘=𝐸𝑗 𝑘=1
𝑛 𝑛
Vincolo Temporale ∑ 𝑥𝑗𝑘 ∗ 𝑡𝑗 ≤ 𝐴𝑘 ∗ 𝑇𝑐 ∑ 𝑥𝑗𝑘 ∗ 𝑡𝑗 ≤ 𝑀
(Tc sempre rispettato 𝑗=1 𝑗=1
nelle k-esime stazioni)
A = variabile (ausiliaria) di utilizzo M = variabile ausiliaria rappresentante
della stazione (1 si, 0 no) il limite superiore del massimo
carico di lavoro delle stazioni
𝐿ℎ 𝐿𝑗
Vincolo di Precedenza
(ogni task j eseguita sempre ∑ 𝑥ℎ𝑘 ∗ 𝑘 ≤ ∑ 𝑥𝑙𝑘 ∗ 𝑘
dopo i predecessori h) 𝑘=𝐸ℎ 𝑘=𝐸𝑗
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 24
-
• Metodi Euristici (LCR, KW, RPW)
o LCR “Largest Candidate Rule”
Metodo che tiene conto solo della durata dei task e non delle precedenze. La durata dei task
dunque fungerà da regola di priorità nell’assegnazione di questi alle stazioni (sempre nel
rispetto dei vincoli di precedenze imposti dal diagramma nodi-archi e del vincolo di tempo
ciclo, Tk<Tc ∀𝑘 [se due task dovessero avere stessa durata si da priorità a quello con più
followers]). Si ordinano i task in maniera decrescente in base al tempo, si apre la prima
stazione assegnando ad essa il task con durata maggiore ma che rispetti i vincoli di priorità, e
si procede finché tutti i task non sono assegnati ad una stazione.
Vediamo un’applicazione del metodo LCR alla seguente linea di produzione:
t1 = 1.5 [s/min/h ecc] 2 0.3
1 3 7
1.2 2.5 1.1
0.5 1.9
8 9 11
0.7 0.8
2 4 5 10
0.8
6
Tc = 3.8 min/pz
▪ Elenco dei task:
1 2 3 4 5 6 7 8 9 10 11
▪ Elenco riordinato in ordine decrescente secondo i vari t:
9 3 5 1 8 11 6 10 4 2 7
Nota: 6 e 10 hanno stesso t, perciò nel riordinamento è stato considerato anche il
numero di followers, dando precedenza al task che ne ha di più, cioè il task 6.
▪ Assegnazione dei task alle varie stazioni:
• S1 – 1,3,7
• S2 – 6,10,2,4
• S3 – 5,8
• S4 – 9,11
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 25
-
o KW “Kilbridge and Wester”
Metodo che tiene conto solo delle precedenze dei task e non della durata. Si osserva il
diagramma delle precedenze i cui vincoli fungeranno da regola di priorità nell’assegnazione
dei task alle stazioni. I task verranno organizzati in colonne in base alla priorità, si inizia
assegnando alla 1° colonna i task che non hanno predecessors e si procede con le colonne
successive osservando i task direttamente collegati a quelli della 1° colonna. Un task può
essere spostato tra le colonne al massimo fino a quella immediatamente precedente al suo/ai
suoi follower/s (task 6 e 10 nell’esempio).
Esempio: (Stessa linea di produzione analizzata col metodo LCR)
I II III IV V VI
1 3 7
2 4 5 8 9
6 6 11
10 10 10 10
3.6 [Ttot] 2.7 2.2 1.2 2.5 1.1
Assegnazione dei task alle varie stazioni:
• S1 – 1,2,6,10
• S2 – 3,4,7
• S3 – 5,8
• S4 – 9,11
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 26
-
o RPW “Ranked Positional Weights”
Metodo che attribuisce ai task un peso posizionale, tiene conto delle durate e indirettamente
delle precedenze. Per ogni task si calcola il seguente indice:
RPWj = 𝑡𝑗 + ∑.𝑖∊𝐹𝑗∗ 𝑡𝑖 Dove Fj* è l’insieme di tutti i followers del task j
Più RPW è grande maggiore è l’importanza del task. Questo metodo dunque tiene conto anche
delle precedenze in quanto somma i tempi dei task che seguono il j (vincoli di precedenza).
Si dispongono il task in base al valore di RPW decrescente e si compongono le stazioni
sfruttando tale ordine.
Esempio: (Stessa linea di produzione analizzata col metodo LCR)
Task RPW Ranking Task ordinate per Rank
1 8.6 1 1
2 7.9 2 2
3 7.1 5 6
4 7.4 4 4
5 6.7 6 3
6 7.5 3 5
7 5.1 7 7
8 4.8 8 8
9 3.6 10 10
10 4.4 9 9
11 1.1 11 11
Es. calcolo RPW:
RPW1 = t1+t2+t3+t7+t8+t9+t11 = 8.6
Assegnazione dei task alle varie stazioni:
• S1 – 1,2,6,4
• S2 – 3,5,7
• S3 – 8,10
• S4 – 9,11
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 27
-
Ulteriore esempio sui bilanciamenti:
Task Tempo di esecuzione Bilanciamento con LCR
4 6 Stazione 1 Stazione 2
1 5 1 4
2 3 2 5
5 2 3
3 1
Task RPW Bilanciamento con RPW
1 5+1+6+2=14 Stazione 1 Stazione 2
2 3+6+2=11 1 4
3 1+6+2=9 2 5
4 6+2=8 3
5 2
Bilanciamento con KW
Task Stazione 1 Stazione 2 Stazione 3
1 3 5
2 4
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 28
-
• Analisi di redditività
o Classificazione dei costi in base alla potenzialità produttiva
U=R–C (Utile = Ricavi - Costi)
R = p*Q (p = prezzo di vendita del singolo prodotto [€/Pz])
Q = produzione annua [Pz/anno]
Esistono 2 criteri per la classificazione dei costi:
1. C = φ(Q) Dipendenza dei costi dalla produzione
Dove i costi si dividono in:
➢ Costi VARIABILI: dipendono direttamente dai volumi di produzione
➢ Costi FISSI: indipendenti dai volumi di produzione (nel lungo termine [e grandi volumi di
produzione] i costi fissi hanno andamento a gradino, nel breve termine hanno andamento lineare).
Principio di rendimento decrescente: raggiunto un certo livello di produzione, un incremento della
stessa comporta una diminuzione dell’utile, ciò è dovuto all’alto grado di saturazione dei
macchinari che in alcuni casi non sono in grado di evadere a pieno la produzione richiesta ed altri
problemi simili.
C = CFIX + CVAR (Costi = costi fissi + costi variabili) [€/anno]
CVAR = cVAR*Q (cVAR = costo variabile unitario [€/Pz])
C = C/Q = (CFIX + CVAR)/Q = CFIX /Q + cVAR (Costo medio [€/anno])
Cm = dC/dQ (Costo marginale: rappresenta l’incremento del costo quando si passa da una
produzione Q a Q+1 → extracosto).
NB: nell’ipotesi di linearità Cm = cVAR.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 29
-
2. C = Φ(t) Dipendenza dei costi dal tempo
Dove i costi si dividono in:
➢ Costi di INSTALLAZIONE/IMPIANTO: costi da sostenere per rendere possibile la produzione
(effettuati all’anno 0 → I0)
➢ Costi di ESERCIZIO: costi che nascono durante la produzione (ad esempio manutenzione,
riparazione guasti, mancati ricavi…)
Nei costi di installazione oltre agli investimenti iniziali è presente il CAPITALE CIRCOLANTE.
Esso è rappresentato dalla valorizzazione di tutti i beni disponibili, all’avvio della produzione, che
non sono ammortizzabili e quindi non rappresentano un investimento iniziale, ad esempio le materie
prime stoccate in magazzino. Tutto ciò rappresenta il capitale circolante, una volta terminata la
produzione/cessata l’attività può tornare cash.
Qott
Q*
Qp
R: retta dei ricavi, tanto più pendente quanto è maggiore il prezzo di vendita del prodotto
CFIX = retta orizzontale pari ai costi fissi
CFIX + CVAR = parabola con concavità verso l’alto
• Qp: Dall’intersezione tra la retta R e la parabola Ctot si risale alla produzione di pareggio Qp
(BEP, Break Even Point), produzione alla quale U=0. Se Q<Qp la produzione è in perdita.
• Q*: Tracciando una retta passante per l’origine e tangente a Ctot si risale invece a Q*, livello di
produzione che mi permette di avere minimo costo unitario (cFIX + cVAR [€/Pz]) del prodotto.
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 30
-
• Qott: Tracciando la retta parallela a R e tangente a CFIX + CVAR risalgo alla produzione ottimale
Qott, che mi permette di avere Utile massimo.
• Flussi di cassa, Ricavi, Costi, OCC, Reddito imponibile e concetto di ammortamento
fiscale
Fk = qk ∗ mc – t ∗ qk ∗ mc + t ∗ Afisc + t ∗ Int pass − Ek = Flusso di cassa per l’anno K
Fk = (qk ∗ mc ) ∗ (1– t ) + (Afisc + Int pass ) ∗ t − Ek
• F0 = - I0 = Flusso di cassa all’anno 0 (I0 è l’investimento iniziale)
• p = prezzo di vendita del prodotto [€/Pz]
• qk = produzione annua all’anno k
• c̅ = costo unitario per la produzione del prodotto (comprende tutto tranne i costi di impianto)
• p-c̅ = mc = margine di contribuzione unitario
• t = aliquota fiscale (è una %)
• Afisc = ammortamento fiscale, può essere una quota data dal testo o una % dell’investimento
iniziale [€/anno]. L’ammortamento fiscale è diverso dall’ammortamento economico, mi
permette di ridurre l’imponibile fiscale riducendo così le tasse che annualmente devo pagare.
• Int pass = quota di interessi passivi [€/anno]
• Ek = esborsi all’anno K, diverso dall’investimento iniziale che va considerato all’anno 0.
Un’altra formulazione per il flusso di cassa è la seguente:
Fk = Rk - Ck – T
o Ck = costi totali all’anno k (manodopera, materie prime, energia elettrica… tutto tranne
i costi di investimento iniziale)
o T = t * Ik (Tasse = aliquota fiscale * Imponibile fiscale)
▪ Ik = Rk - Ck - Afisc - Int pass Imponibile fiscale all’anno k
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Impianti Industriali M UniBo 2016/2017 - 31
-
• Richiamo sul VAN e Pay Back Period
Il valore attuale netto è una metodologia tramite cui si definisce il valore attuale (in inglese NPV,
Net Present Value) di una serie attesa di flussi di cassa non solo sommandoli contabilmente
ma attualizzandoli sulla base del tasso di rendimento (costo opportunità dei mezzi propri (i o OCC)).
𝑛
𝐹𝑘
𝑉𝐴𝑁 = −𝐶0 + ∑
(1 + 𝑖)𝑘
𝑘=1
VAN > 0 → investimento conveniente
VAN < 0 → investimento in perdita
Se i flussi di cassa sono costanti anno per anno si può scrivere:
Fk
VAN= −I0 + s
con s = (1 + i)k = coefficiente di ammortamento
Nell’analisi di convenienza di un investimento è utile valutare anche il Periodo di Rimborso (Pay Back
Period), che rappresenta il numero di anni necessari per compensare l'investimento attraverso flussi
positivi. In altre parole, è la prima scadenza in cui si verifica un'inversione di segno nei saldi di cassa.
Più il PbP è basso più l’investimento è sicuro, perché più vado avanti negli anni maggiore è l’incertezza
della previsione.
Per calcolare il PbP si può porre l’equazione del VAN = 0:
𝐹𝑘
−𝐼0 + ∑𝑛𝑘=1 =0 e ricavo l’anno k (spesso valore in virgola) a cui si verifica la condizione.
(1+𝑖)𝑘
Un’altra formula per calcolare il PbP è la seguente:
x = ultimo anno in cui VAN<0 ; x+1 = primo anno in cui VAN>0
PbP = x + |VANx|/F’k,x+1
|VANx|= valore assoluto dell’VAN all’anno x (in modulo perché è negativo) [devo calcolare VAN
anno per anno per vedere quando passa da negativo a positivo! Il valore dell’VAN all’anno x dunque
sarà il valore cumulato di tutti gli anni precedenti].
F’k,x+1 = flusso di cassa ATTUALIZZATO dell’anno x+1.
Ad esempio:
VAN1 =-I0 + F’1
VAN2 =-I0 + F’1+ F’2
VAN3 =-I0 + F’1+ F’2 + F’3 <0
VAN4 =-I0 + F’1+ F’2 + F’3+ F’4>0
PbP = 3 + | VAN3|/ F’4
Lorenzo De Santis – Alberto Bellon – Andrea Tranchida
Potrebbero piacerti anche
- Appunti Matematica Finanziaria MASALADocumento82 pagineAppunti Matematica Finanziaria MASALAAndrea PalaNessuna valutazione finora
- Appunti ImpiantiDocumento51 pagineAppunti ImpiantiAndrea ScazzieriNessuna valutazione finora
- Dispensa Regressione Lineare e Logistica 2014 PDFDocumento44 pagineDispensa Regressione Lineare e Logistica 2014 PDFnvchim3551Nessuna valutazione finora
- Incertezza Di MisuraDocumento11 pagineIncertezza Di MisuraAlw MmmNessuna valutazione finora
- Esercizi Di Statistica Con SoluzioniDocumento127 pagineEsercizi Di Statistica Con SoluzioniClaudio CeccarelliNessuna valutazione finora
- Ottimizzazione Della Politica Di Lockdown Per Covid-19Documento28 pagineOttimizzazione Della Politica Di Lockdown Per Covid-19Facundo RoncagliaNessuna valutazione finora
- 0809 Eserciziario StatDocumento49 pagine0809 Eserciziario StatPierpaolo SantucciNessuna valutazione finora
- P Sciortino PDFDocumento64 pagineP Sciortino PDFlinus18Nessuna valutazione finora
- Controlli Statistici CorrettoDocumento42 pagineControlli Statistici Correttorenato.locascioNessuna valutazione finora
- Premesse Box JenkinsDocumento16 paginePremesse Box JenkinsFrancesco PeteaNessuna valutazione finora
- GravitazioneDocumento15 pagineGravitazioneTirton 701Nessuna valutazione finora
- Logit Probit PDFDocumento31 pagineLogit Probit PDFDaniele PannunziNessuna valutazione finora
- Statistica Applicata Alla FisicaDocumento93 pagineStatistica Applicata Alla FisicaMario CacasennoNessuna valutazione finora
- Statistica Lezione DOEDocumento54 pagineStatistica Lezione DOEAlessandro MuragliaNessuna valutazione finora
- Anexo 1-Tarea 1 CinematicaDocumento14 pagineAnexo 1-Tarea 1 CinematicaKARLYS JOHANA OLIVERO ANAYANessuna valutazione finora
- Appunti Di Analisi Matematica I - A.S. 2021-2022Documento71 pagineAppunti Di Analisi Matematica I - A.S. 2021-2022dsifj4208ut08Nessuna valutazione finora
- Fis1 A01 MetrologiaDocumento112 pagineFis1 A01 MetrologiaFrancesco PreteNessuna valutazione finora
- A3 TestoDocumento8 pagineA3 TestoJustin RossoNessuna valutazione finora
- Relazione FisicaDocumento9 pagineRelazione Fisicamiriam.casaraNessuna valutazione finora
- Fuoco LentiDocumento9 pagineFuoco LentiTirton 701Nessuna valutazione finora
- Lez 0Documento33 pagineLez 0LAURA VIRGADAMONessuna valutazione finora
- 1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10Documento136 pagine1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10riccardoNessuna valutazione finora
- StimaDocumento44 pagineStimafederica alminiNessuna valutazione finora
- Esperienza Piano InclinatoDocumento4 pagineEsperienza Piano InclinatodfNessuna valutazione finora
- Modulo 3-Norma Uni-Cei Env 13005Documento13 pagineModulo 3-Norma Uni-Cei Env 13005Carmelo LeggioNessuna valutazione finora
- Anova PDFDocumento18 pagineAnova PDFDaniele PannunziNessuna valutazione finora
- Esercizi Di StatisticaDocumento41 pagineEsercizi Di StatisticaMatteo GaioNessuna valutazione finora
- Metodi NumericiDocumento17 pagineMetodi NumericiLeonardo GirolamiNessuna valutazione finora
- Gruppo10 Esp2 AABDocumento36 pagineGruppo10 Esp2 AABAlessandra MontalbanoNessuna valutazione finora
- Relazione Viscosimetro Gruppo G21 M ZDocumento16 pagineRelazione Viscosimetro Gruppo G21 M ZCostantinoNessuna valutazione finora
- 13 - Previsioni Domanda SlidesDocumento18 pagine13 - Previsioni Domanda Slidesanon_409589596Nessuna valutazione finora
- G. Occhetta - Introduzione Alla Geometria DifferenzialeDocumento114 pagineG. Occhetta - Introduzione Alla Geometria DifferenzialeMatteo Grimaldi100% (1)
- Analisi in Più Variabili 1: Primo SemestreDocumento130 pagineAnalisi in Più Variabili 1: Primo SemestreAndrea TamburelliNessuna valutazione finora
- Uni Notazioni Misure 06102014Documento10 pagineUni Notazioni Misure 06102014Alex CarotenutoNessuna valutazione finora
- Econo PhysicsDocumento44 pagineEcono PhysicsEnrico De RisioNessuna valutazione finora
- Statistica Approssimazione DatiDocumento42 pagineStatistica Approssimazione DatialessandrotazziniNessuna valutazione finora
- Eserciziario - Analisi 2Documento69 pagineEserciziario - Analisi 2dinobiagNessuna valutazione finora
- Lezione IDocumento122 pagineLezione ISimona MezeiNessuna valutazione finora
- Relazione Di Calcolo PlintoDocumento17 pagineRelazione Di Calcolo PlintoAlessandro FilardoNessuna valutazione finora
- Incertezza Di MisuraDocumento102 pagineIncertezza Di MisuraTeo BreviNessuna valutazione finora
- Analisi Statistica Di Dati BiomediciDocumento37 pagineAnalisi Statistica Di Dati BiomediciMANessuna valutazione finora
- Tesi2 PDFDocumento75 pagineTesi2 PDFginobusgatNessuna valutazione finora
- ST1-3-variabilità e FormaDocumento21 pagineST1-3-variabilità e FormalucamaronsNessuna valutazione finora
- Esercitazione 5 - UbicazioneDocumento16 pagineEsercitazione 5 - UbicazioneFilippo MeliniNessuna valutazione finora
- Incertezza Di MisuraDocumento15 pagineIncertezza Di MisurailroscioNessuna valutazione finora
- FISICA1Documento48 pagineFISICA1giovannimontana2003Nessuna valutazione finora
- Elementi Di A Raffaele SantoroDocumento42 pagineElementi Di A Raffaele SantoroLuigi De MartinoNessuna valutazione finora
- Esercitazione 04 - Sistemi BidimensionaliDocumento18 pagineEsercitazione 04 - Sistemi BidimensionaliAmalia RamunnoNessuna valutazione finora
- Least Squares MCDocumento48 pagineLeast Squares MCDunsScotoNessuna valutazione finora
- 12184-Teoria Del PortafoglioDocumento173 pagine12184-Teoria Del PortafoglioKyocera LGNessuna valutazione finora
- Costruzione Dei Numeri Naturali PDFDocumento65 pagineCostruzione Dei Numeri Naturali PDFGiovanni CagnettaNessuna valutazione finora
- Relazione TelaioDocumento34 pagineRelazione Telaiomaryl85Nessuna valutazione finora
- Lezioni AutomaticaDocumento8 pagineLezioni Automaticaelectro.tecnico00Nessuna valutazione finora
- ContatoreDocumento6 pagineContatoreGianmarco MarroccoNessuna valutazione finora
- Stabilizzazione Pendolo InversoDocumento50 pagineStabilizzazione Pendolo InversoAlessandro Pilloni100% (1)
- Analizzare e interpretare misure ottiche acquisite con OTDR - EserciziarioDa EverandAnalizzare e interpretare misure ottiche acquisite con OTDR - EserciziarioNessuna valutazione finora
- Verifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPDa EverandVerifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPNessuna valutazione finora
- Teorema della proiezione di Hilbert: Sbloccare le dimensioni nella visione artificialeDa EverandTeorema della proiezione di Hilbert: Sbloccare le dimensioni nella visione artificialeNessuna valutazione finora
- Fisica: dinamica 1 con Scratch: Esperimenti di fisica con Scratch sui moti con attrito con il calcolo numericoDa EverandFisica: dinamica 1 con Scratch: Esperimenti di fisica con Scratch sui moti con attrito con il calcolo numericoNessuna valutazione finora
- Esercizi di matematica: studio di funzioni a variabile realeDa EverandEsercizi di matematica: studio di funzioni a variabile realeNessuna valutazione finora
- Scheda 1 Figura BagninoDocumento0 pagineScheda 1 Figura BagninotorellolucaNessuna valutazione finora
- Torni Per Metalli & CoDocumento12 pagineTorni Per Metalli & CobillagatesNessuna valutazione finora
- 01-Criteri ProgettazioneDocumento163 pagine01-Criteri ProgettazioneAle85toNessuna valutazione finora
- Introduzione A Simulink PDFDocumento79 pagineIntroduzione A Simulink PDFA.PellegrinoNessuna valutazione finora
- EffemeridiDocumento101 pagineEffemeridiKINDINISNessuna valutazione finora
- Alieni Ufo e I Dossier DeclassificatiDocumento122 pagineAlieni Ufo e I Dossier Declassificatiernesto zapataNessuna valutazione finora