Potrebbero piacerti anche
- Verifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPDa EverandVerifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPNessuna valutazione finora
- Relazione Teoria Dei Sistemi - Lidia de Luca - Matricola 214679Documento29 pagineRelazione Teoria Dei Sistemi - Lidia de Luca - Matricola 214679CarlyNessuna valutazione finora
- Software per la minimizzazione di reti logiche e macchine sequenzialiDa EverandSoftware per la minimizzazione di reti logiche e macchine sequenzialiNessuna valutazione finora
- FdA 3.modelli Di StatoDocumento37 pagineFdA 3.modelli Di StatoRocco Spano'Nessuna valutazione finora
- Progressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Da EverandProgressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Nessuna valutazione finora
- Processi GaussianiDocumento14 pagineProcessi GaussianimarcobertocchiNessuna valutazione finora
- Elaborato 5Documento2 pagineElaborato 5Cristian HaivazNessuna valutazione finora
- Elaborato 5Documento2 pagineElaborato 5Cristian HaivazNessuna valutazione finora
- Tauraso An 2Documento266 pagineTauraso An 2Gabriele ScarlattiNessuna valutazione finora
- 2016 Integrali Curvilinei 1Documento11 pagine2016 Integrali Curvilinei 1ajejeNessuna valutazione finora
- Luc CA 05 Spazio Degli StatiDocumento8 pagineLuc CA 05 Spazio Degli StatiMattia GallettiNessuna valutazione finora
- Stabilit ADocumento49 pagineStabilit AAnonymous 3Ic25HXtrNessuna valutazione finora
- l02 Equazioni Di StatoDocumento19 paginel02 Equazioni Di StatoYakubu MustafaNessuna valutazione finora
- Serie FourierDocumento16 pagineSerie FourierDionisio De ZoltNessuna valutazione finora
- Studio Della Convergenza Del Metodo Delle PotenzeDocumento51 pagineStudio Della Convergenza Del Metodo Delle PotenzeSara RinNessuna valutazione finora
- Eserciziario FDADocumento153 pagineEserciziario FDAAmedeo Franco BonattiNessuna valutazione finora
- Sistemi Lineari Tempo InvariantiDocumento41 pagineSistemi Lineari Tempo InvariantialbeilmateNessuna valutazione finora
- Stima Stato RegolatoreDocumento73 pagineStima Stato RegolatoreGraziano TrainiNessuna valutazione finora
- Sigsys 07Documento18 pagineSigsys 07Nicolò OngaroNessuna valutazione finora
- 12 LSPP PDFDocumento28 pagine12 LSPP PDFNicolaFrosiNessuna valutazione finora
- P Sciortino PDFDocumento64 pagineP Sciortino PDFlinus18Nessuna valutazione finora
- Disp NMCDocumento60 pagineDisp NMCpolaise_rockNessuna valutazione finora
- Dispense PDFDocumento156 pagineDispense PDFSamNessuna valutazione finora
- A3 TestoDocumento8 pagineA3 TestoJustin RossoNessuna valutazione finora
- Matematici SpecialeDocumento351 pagineMatematici SpecialeRZW RNessuna valutazione finora
- A4 TestoDocumento2 pagineA4 TestoJustin RossoNessuna valutazione finora
- Sistemi Dinamici A Tempo ContinuoDocumento39 pagineSistemi Dinamici A Tempo ContinuoMicheleD'amicoNessuna valutazione finora
- Appunti Di Teoria Dei SegnaliDocumento42 pagineAppunti Di Teoria Dei Segnalibrky100% (1)
- Eserciziario Controlli AutomaticiDocumento72 pagineEserciziario Controlli AutomaticigiovannaNessuna valutazione finora
- TesiDocumento30 pagineTesiMarianunzia Di PasqualeNessuna valutazione finora
- Esercitazione 04 - Sistemi BidimensionaliDocumento18 pagineEsercitazione 04 - Sistemi BidimensionaliAmalia RamunnoNessuna valutazione finora
- Sistemi Dinamici A Tempo ContinuoDocumento33 pagineSistemi Dinamici A Tempo ContinuoCris Joseph PalincasNessuna valutazione finora
- Modelli Statici LineariDocumento15 pagineModelli Statici LineariSudip ErcolaniNessuna valutazione finora
- DispenseDocumento115 pagineDispensecodraNessuna valutazione finora
- Tesi FirmataDocumento28 pagineTesi FirmataMarianunzia Di PasqualeNessuna valutazione finora
- TSI-EsercitazioniSvolte-3-LTI TC Dominio TempoDocumento16 pagineTSI-EsercitazioniSvolte-3-LTI TC Dominio TempoFeliçia Anna NotaroNessuna valutazione finora
- App UntiDocumento141 pagineApp UntiGomblotto BotNessuna valutazione finora
- Introduzione Ai Segnali AleatoriDocumento51 pagineIntroduzione Ai Segnali AleatoriMarioNessuna valutazione finora
- Appunti Di Teoria Dei SegnaliDocumento37 pagineAppunti Di Teoria Dei SegnalibrkyNessuna valutazione finora
- Elaborato 1Documento2 pagineElaborato 1Cristian HaivazNessuna valutazione finora
- Spazi Correlazione e SpettroDocumento36 pagineSpazi Correlazione e SpettroLorenzo PiazzoNessuna valutazione finora
- Matematici Speciale - Dana Constantinescu - CraiovaDocumento59 pagineMatematici Speciale - Dana Constantinescu - Craiovamiroiu_m100% (1)
- Elaborato 4Documento4 pagineElaborato 4Cristian HaivazNessuna valutazione finora
- Metodi Monte CarloDocumento16 pagineMetodi Monte CarloGian Maria LombardiNessuna valutazione finora
- 01 - Esercizi Su Segnali, Sistemi LTI, Trasformata Di FourierDocumento21 pagine01 - Esercizi Su Segnali, Sistemi LTI, Trasformata Di Fourierreversed12345Nessuna valutazione finora
- Elaborazione NumericaDocumento120 pagineElaborazione NumericaNicolaSparnacci100% (1)
- 9.integrali Di Linea Di Prima SpecieDocumento11 pagine9.integrali Di Linea Di Prima Speciefluffa23Nessuna valutazione finora
- Dinamica e Modellistica Della Turbolenza - Esercitazioni Del CorsoDocumento24 pagineDinamica e Modellistica Della Turbolenza - Esercitazioni Del CorsoAlfredo PatriziNessuna valutazione finora
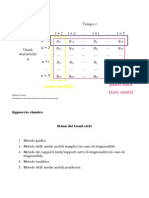
- Premesse Box JenkinsDocumento16 paginePremesse Box JenkinsFrancesco PeteaNessuna valutazione finora
- Studio Di Un Sistema Di Equazioni Differenziali FedericoAnneseDocumento8 pagineStudio Di Un Sistema Di Equazioni Differenziali FedericoAnneseFederico AnneseNessuna valutazione finora
- Si Consideri Il Seguente Sistema:: X U (T) X X y (T) XDocumento5 pagineSi Consideri Il Seguente Sistema:: X U (T) X X y (T) XJustin RossoNessuna valutazione finora
- Modello Sistemi Fisici ElementariDocumento29 pagineModello Sistemi Fisici ElementariMarco Salvatore VanadìaNessuna valutazione finora
- Formulario TDSDocumento7 pagineFormulario TDSMarco D'AgostinoNessuna valutazione finora
- Vibrazioni - Normative e DiagnosticaDocumento60 pagineVibrazioni - Normative e DiagnosticaFrancesco TaliniNessuna valutazione finora
- Controlli AutoDocumento18 pagineControlli AutodbNessuna valutazione finora
- Esercitazione Controlli Automatici - 25 Maggio 2011 PDFDocumento9 pagineEsercitazione Controlli Automatici - 25 Maggio 2011 PDFfraformicNessuna valutazione finora
- Relazione III Lab Meccanica - Gruppo A1Documento9 pagineRelazione III Lab Meccanica - Gruppo A1Federico AnneseNessuna valutazione finora
- Dispensa Matematica - Spazi Vettoriali, Differenziazione, Ottimizzazione (M.Cigola)Documento56 pagineDispensa Matematica - Spazi Vettoriali, Differenziazione, Ottimizzazione (M.Cigola)1600170Nessuna valutazione finora
- Testo Esame 27 02 2023Documento2 pagineTesto Esame 27 02 2023Andrea GreppiNessuna valutazione finora
- Le Variabili Di DelaunayDocumento18 pagineLe Variabili Di DelaunayAndrea TamburelliNessuna valutazione finora
- Radionica: Studio e pratica della radionica. Completo di 84 circuiti e 7 quadranti inediti pronti da utilizzareDa EverandRadionica: Studio e pratica della radionica. Completo di 84 circuiti e 7 quadranti inediti pronti da utilizzareValutazione: 4 su 5 stelle4/5 (4)
- Ai confini della realtà: Roswell 1947 nuovi aggiornamentiDa EverandAi confini della realtà: Roswell 1947 nuovi aggiornamentiValutazione: 1 su 5 stelle1/5 (1)
- Neuro Quantica Evolutiva: Parlare al cervello quantico e cambiare la propria vitaDa EverandNeuro Quantica Evolutiva: Parlare al cervello quantico e cambiare la propria vitaNessuna valutazione finora
- Esercizi svolti di Matematica: Geometria AnaliticaDa EverandEsercizi svolti di Matematica: Geometria AnaliticaNessuna valutazione finora
- 9 e 99 - Curiosità e stravaganze nel mondo dei numeriDa Everand9 e 99 - Curiosità e stravaganze nel mondo dei numeriNessuna valutazione finora
- Guida pratica per riconoscere le stelle e le costellazioni (translated)Da EverandGuida pratica per riconoscere le stelle e le costellazioni (translated)Nessuna valutazione finora
- Esercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoDa EverandEsercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoValutazione: 5 su 5 stelle5/5 (1)
- Il Metallo, l'Isolante e il Superconduttore: Uno sguardo alla moderna fisica della materia condensataDa EverandIl Metallo, l'Isolante e il Superconduttore: Uno sguardo alla moderna fisica della materia condensataNessuna valutazione finora
- Esercizi di matematica: equazioni differenziali a derivate parzialiDa EverandEsercizi di matematica: equazioni differenziali a derivate parzialiValutazione: 5 su 5 stelle5/5 (1)