Potrebbero piacerti anche
- Regola Del ParallelogrammaDocumento5 pagineRegola Del ParallelogrammaPalma MazzaraNessuna valutazione finora
- VettoriDocumento25 pagineVettoriLeonardo MarzialeNessuna valutazione finora
- FisicaDocumento3 pagineFisicaMarina VenturiniNessuna valutazione finora
- Vettori in FisicaDocumento5 pagineVettori in FisicaAmedeo De AmicisNessuna valutazione finora
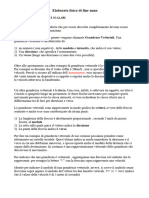
- Elaborato Fisica Di Fine AnnoDocumento15 pagineElaborato Fisica Di Fine Annolorenzo.merandiNessuna valutazione finora
- Fisica LADocumento97 pagineFisica LARiccardo DrudiNessuna valutazione finora
- I VettoriDocumento30 pagineI VettoriLorenza CiaccioNessuna valutazione finora
- Fisica-Consulta - VectoresDocumento7 pagineFisica-Consulta - VectoresKevin CajasNessuna valutazione finora
- I Vettori in Forma CartesianaDocumento21 pagineI Vettori in Forma CartesianaMattia GaribaldinoNessuna valutazione finora
- Lez 3Documento2 pagineLez 3EloisaNessuna valutazione finora
- GeometriaDocumento15 pagineGeometriaGiovanni GozziniNessuna valutazione finora
- Lezione 1 FisicaDocumento3 pagineLezione 1 FisicaIlisa SpahiuNessuna valutazione finora
- Forze e VettoriDocumento26 pagineForze e Vettoriaccount provaNessuna valutazione finora
- 2 (D) VectoresDocumento44 pagine2 (D) Vectoresadonis ayzamaNessuna valutazione finora
- Appendice 01Documento11 pagineAppendice 01donato.cannito03Nessuna valutazione finora
- Cenni Di Calcolo VettorialeDocumento11 pagineCenni Di Calcolo VettorialemattythebestxdNessuna valutazione finora
- Fisica Lezione 2,3,4,6Documento11 pagineFisica Lezione 2,3,4,6giadagenco060703Nessuna valutazione finora
- I VettoriDocumento5 pagineI VettoriMartina BaroliNessuna valutazione finora
- Zanichelli_03Documento29 pagineZanichelli_03naruto.4.ninja.1Nessuna valutazione finora
- VettoriDocumento29 pagineVettoriMichele ZanellaNessuna valutazione finora
- Elementi Calcolo VettorialeDocumento8 pagineElementi Calcolo VettorialegioviiNessuna valutazione finora
- Forze e VettoriDocumento11 pagineForze e VettoriCeceNessuna valutazione finora
- Calcolo VettorialeDocumento123 pagineCalcolo VettorialeaemilorNessuna valutazione finora
- VettoriDocumento15 pagineVettoriaccount provaNessuna valutazione finora
- VettoriDocumento2 pagineVettoriFiredMantis1623Nessuna valutazione finora
- 2 - VettoriDocumento40 pagine2 - Vettorie.rutigliano2Nessuna valutazione finora
- Geometria AnaliticaDocumento4 pagineGeometria AnaliticaJuan Camilo Sanchez MarinNessuna valutazione finora
- I VettoriDocumento35 pagineI VettoriLilith Willer100% (3)
- Elementi Di Calcolo Vettoriale Con Applicazioni in Geometria AnaliticaDocumento21 pagineElementi Di Calcolo Vettoriale Con Applicazioni in Geometria AnaliticaMarcello SetteNessuna valutazione finora
- VettoriDocumento4 pagineVettoriEmanuele RameNessuna valutazione finora
- Fisica?Documento2 pagineFisica?denNessuna valutazione finora
- Matematica: calcolo vettoriale e matricialeDa EverandMatematica: calcolo vettoriale e matricialeValutazione: 5 su 5 stelle5/5 (1)
- LEZIONIDocumento204 pagineLEZIONIGuido Davide Dall'OlioNessuna valutazione finora
- Mecsld 03 VettoriDocumento32 pagineMecsld 03 VettoriBrunoRizzoNessuna valutazione finora
- Geometria Analitica PDFDocumento32 pagineGeometria Analitica PDFgioioNessuna valutazione finora
- 04 CapDocumento21 pagine04 CapSusanna CeppiNessuna valutazione finora
- Esercizi di matematica: vettori e spazi vettorialiDa EverandEsercizi di matematica: vettori e spazi vettorialiNessuna valutazione finora
- Div Grad RotDocumento10 pagineDiv Grad Rotjaxel80hmNessuna valutazione finora
- GeometriaDocumento158 pagineGeometriaMattia TorreNessuna valutazione finora
- 2 VettoriDocumento11 pagine2 VettoriDavide SquadroneNessuna valutazione finora
- Fis1!0!02 Calcolo VettorialeDocumento63 pagineFis1!0!02 Calcolo VettorialeFrancesco PreteNessuna valutazione finora
- MeccanicaDocumento140 pagineMeccanicatheodorNessuna valutazione finora
- Moto Rettilineo UniformeDocumento2 pagineMoto Rettilineo UniformeElisa BragantiniNessuna valutazione finora
- Vettori Nel Piano CartesianoDocumento2 pagineVettori Nel Piano CartesianoMarco CostaNessuna valutazione finora
- VettoriDocumento15 pagineVettorivalearchiNessuna valutazione finora
- GeometriaDocumento268 pagineGeometriaFilippoCampaCampagnaroNessuna valutazione finora
- Fisica TrilceDocumento259 pagineFisica TrilceJP Vdlc0% (3)
- VettoriDocumento19 pagineVettoriadigaNessuna valutazione finora
- Geometri A+anali Tica+Rep.+Teo RicoDocumento5 pagineGeometri A+anali Tica+Rep.+Teo RicoOneState StateNessuna valutazione finora
- Lezione 1Documento17 pagineLezione 1Gianluca ParadisoNessuna valutazione finora
- Geometria e AlgebraDocumento9 pagineGeometria e AlgebraAntonio MazzilliNessuna valutazione finora
- Spazio VettorialeDocumento7 pagineSpazio VettorialesteinitzNessuna valutazione finora
- Doghieri - Proprietà Termodinamiche e Di Trasporto - AppuntiDocumento74 pagineDoghieri - Proprietà Termodinamiche e Di Trasporto - AppuntinavaronefraNessuna valutazione finora
- Vettori Applicati Pagina 1Documento33 pagineVettori Applicati Pagina 1raffaeleNessuna valutazione finora
- Dispense Meccanica Delle StruttureDocumento43 pagineDispense Meccanica Delle StruttureFrancesca SartiniNessuna valutazione finora
- Appunti Sui VettoriDocumento31 pagineAppunti Sui VettoriTonia FrassoNessuna valutazione finora
- Cinematica 2D 3D NuovoDocumento6 pagineCinematica 2D 3D NuovoAlessio Di ClementeNessuna valutazione finora