Potrebbero piacerti anche
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Verifica Delletraiettorie Veicolare in Corrispondenza Delle Intersezioni A RasoDocumento20 pagineVerifica Delletraiettorie Veicolare in Corrispondenza Delle Intersezioni A RasoPipolo PippoNessuna valutazione finora
- Progetto PontiDocumento21 pagineProgetto PontiClaudio MiglioriniNessuna valutazione finora
- Relazione Di Calcolo BilancinoDocumento39 pagineRelazione Di Calcolo BilancinoGuido Boggi100% (1)
- John Hancock Analisi Strutturale SemplificataDocumento7 pagineJohn Hancock Analisi Strutturale Semplificataantonioviton07vkNessuna valutazione finora
- Calcolo Risanamenti e PortanzaDocumento9 pagineCalcolo Risanamenti e Portanzaeugenio ricciNessuna valutazione finora
- UNI ENV 1991-2-3bDocumento50 pagineUNI ENV 1991-2-3blodo_85Nessuna valutazione finora
- Azioni FeroviariaDocumento202 pagineAzioni FeroviariaMarko AdamovićNessuna valutazione finora
- 4 Emme Collaudo PontiDocumento34 pagine4 Emme Collaudo PontiCarloDoimoNessuna valutazione finora
- TutoredEttaGliaTo SAP 2000 TUTORIAL BY CSIDocumento145 pagineTutoredEttaGliaTo SAP 2000 TUTORIAL BY CSIAndreaAlberoNessuna valutazione finora
- Relazione - TIPO-2011 Per Calcolo Pavimentazioni Stradali PDFDocumento81 pagineRelazione - TIPO-2011 Per Calcolo Pavimentazioni Stradali PDFusotapiocaNessuna valutazione finora
- 420 ALGASISM STU - Connettori Idraulici - Shock Trasmitter UnitsDocumento8 pagine420 ALGASISM STU - Connettori Idraulici - Shock Trasmitter UnitsIalomiteanu DanNessuna valutazione finora
- CNR-UNI 10011 Parte Verifiche AcciaioDocumento14 pagineCNR-UNI 10011 Parte Verifiche AcciaioAdriano AquinoNessuna valutazione finora
- Telaio Giunti Semi-RigidiDocumento89 pagineTelaio Giunti Semi-RigidiMarco Fasan100% (1)
- Carico Concentrato MuraturaDocumento2 pagineCarico Concentrato MuraturaSalvatore FroncilloNessuna valutazione finora
- Progetto PonteDocumento46 pagineProgetto PonteRobert VochescuNessuna valutazione finora
- Calcolo Solaio FerroDocumento7 pagineCalcolo Solaio Ferromarcome87Nessuna valutazione finora
- Travi ComposteDocumento29 pagineTravi ComposteFedericaNessuna valutazione finora
- Fondazioni - Linee Guida AgiDocumento45 pagineFondazioni - Linee Guida Agiguitarnick2Nessuna valutazione finora
- AICAPDocumento46 pagineAICAPxandrea84xNessuna valutazione finora
- Manuale Di Validazione CALIFFODocumento50 pagineManuale Di Validazione CALIFFOLuca SiciliaNessuna valutazione finora
- Waterproofing-It 01Documento180 pagineWaterproofing-It 01Stuparu VictorNessuna valutazione finora
- Raccomandazioni Tecniche Per La Progettazione Dei Porti TuristiciDocumento42 pagineRaccomandazioni Tecniche Per La Progettazione Dei Porti TuristiciappopippoNessuna valutazione finora
- APPUNTI Meccanica Della Frattura 2019 - Prima ParteDocumento40 pagineAPPUNTI Meccanica Della Frattura 2019 - Prima ParteCRISTIAN MONTESANONessuna valutazione finora
- 1 - Analisi Strutturali Straus7 Capannoni Acciaio Progettazione Antincendio Crosti MarinoDocumento9 pagine1 - Analisi Strutturali Straus7 Capannoni Acciaio Progettazione Antincendio Crosti MarinoAlessandroAleottiNessuna valutazione finora
- Statistica Idrologia Parte 1Documento63 pagineStatistica Idrologia Parte 1Andrea Nicola TurcatoNessuna valutazione finora
- Dichiarazioni Di Cui Al Punto 10.2 D.M.14!01!08Documento3 pagineDichiarazioni Di Cui Al Punto 10.2 D.M.14!01!08milkmilk72Nessuna valutazione finora
- Cedimenti Per FondazioniDocumento13 pagineCedimenti Per FondazioniFederico GentileNessuna valutazione finora
- 025Documento14 pagine025aaliottaNessuna valutazione finora
- Riparazione e Rinforzo Di Ponti in C.A.P.Documento20 pagineRiparazione e Rinforzo Di Ponti in C.A.P.Giacomo EspositoNessuna valutazione finora
- Criteri Per Il Calcolo Dei Plinti Con Bicchiere PDFDocumento16 pagineCriteri Per Il Calcolo Dei Plinti Con Bicchiere PDFlele_33Nessuna valutazione finora
- Tipologie D'intervento PodestaDocumento22 pagineTipologie D'intervento Podestacinzia balcaiciNessuna valutazione finora
- ACCIAIO - GiuntiDocumento21 pagineACCIAIO - GiuntiAndrea Pranno100% (1)
- Verifiche Slu e Sle Travi PrecompresseDocumento22 pagineVerifiche Slu e Sle Travi PrecompresseFabrizio CristofariNessuna valutazione finora
- Appunti Di C.A.P 6 GuyonDocumento50 pagineAppunti Di C.A.P 6 GuyonFilippo De PasqualeNessuna valutazione finora
- MIDAS Gen Per La Sismica e OrdinanzaDocumento75 pagineMIDAS Gen Per La Sismica e Ordinanzaandreabag87Nessuna valutazione finora
- 6.0 Geometria SterzoDocumento9 pagine6.0 Geometria SterzoGiacomoDiPrimaNessuna valutazione finora
- 04 Collegamenti BullonatiDocumento6 pagine04 Collegamenti BullonatiAnonymous zxFhXenNessuna valutazione finora
- Sismica SerbatoiDocumento7 pagineSismica Serbatoisimone0% (1)
- Zincatura A Caldo GuidaDocumento24 pagineZincatura A Caldo GuidaTommaso LeatiNessuna valutazione finora
- s04 Catalogo Fip Fip-DDocumento16 pagines04 Catalogo Fip Fip-DcarlopozNessuna valutazione finora
- CALCESTRUZZO ARMATO - Teoria - 2 - Stati Limite A Presso-Flessione PDFDocumento83 pagineCALCESTRUZZO ARMATO - Teoria - 2 - Stati Limite A Presso-Flessione PDFFabioNessuna valutazione finora
- Ec3 PDFDocumento324 pagineEc3 PDFVincenzo StileNessuna valutazione finora
- Esempio Modellazione TamponaturaDocumento253 pagineEsempio Modellazione TamponaturaLuigi RasoNessuna valutazione finora
- Lezione 15 Ponti (Modello Di Engesser)Documento116 pagineLezione 15 Ponti (Modello Di Engesser)SalvatoreBuccolieroNessuna valutazione finora
- Linee Guida Per La Stesura Del Progetto StrutturaleDocumento9 pagineLinee Guida Per La Stesura Del Progetto StrutturaleMassimo NastiNessuna valutazione finora
- 4 CarroponteDocumento16 pagine4 Carropontemadchild33020Nessuna valutazione finora
- Relazione Di ProgettoDocumento57 pagineRelazione Di ProgettoSig RossiNessuna valutazione finora
- Progetto FondazioniDocumento12 pagineProgetto FondazioniAlessandro PerroneNessuna valutazione finora
- Norme Tecniche Pavimentazioni 2008Documento102 pagineNorme Tecniche Pavimentazioni 2008SamanthaRaoNessuna valutazione finora
- 19 - Acciaio - Esempio Di Calcolo Telaio PianoDocumento17 pagine19 - Acciaio - Esempio Di Calcolo Telaio Pianor_zoro87Nessuna valutazione finora
- Verifica Espulsione Dei Pannelli Di Tamponatura v3 - 00Documento15 pagineVerifica Espulsione Dei Pannelli Di Tamponatura v3 - 00sssssssss89100% (1)
- Viareggio Accident 29.06.09 Final ReportDocumento128 pagineViareggio Accident 29.06.09 Final ReportBruno ThiemeNessuna valutazione finora
- Trasporti Ferroviari ParteA Pisa 11-12-170312Documento71 pagineTrasporti Ferroviari ParteA Pisa 11-12-170312Carmine TranfaNessuna valutazione finora
- 13 TrattamentiDocumento10 pagine13 TrattamentiFederico.IoriNessuna valutazione finora
- ID17015 - Fascicolo Dei CalcoliDocumento47 pagineID17015 - Fascicolo Dei CalcolilorisNessuna valutazione finora
- DYWIT DYWIDAG Sistema Di Post Tensione A Trefoli It PDFDocumento36 pagineDYWIT DYWIDAG Sistema Di Post Tensione A Trefoli It PDFMassimo Averardi RipariNessuna valutazione finora
- A 10-Calcolo Della PavimentazioneDocumento13 pagineA 10-Calcolo Della Pavimentazionejoshuatree20021Nessuna valutazione finora
- Apparecchi Di Sollevamento UNI EN 13001 PDFDocumento4 pagineApparecchi Di Sollevamento UNI EN 13001 PDFagri manNessuna valutazione finora
- Profilati CaviDocumento7 pagineProfilati Cavifrank_the_bangNessuna valutazione finora
- Normativa UNI en 10305Documento2 pagineNormativa UNI en 10305frank_the_bangNessuna valutazione finora
- Seeger ExtDocumento2 pagineSeeger Extfrank_the_bangNessuna valutazione finora
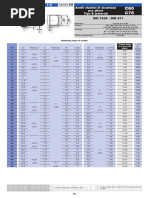
- 07 7435a PDFDocumento1 pagina07 7435a PDFfrank_the_bangNessuna valutazione finora
- Eserciziario MotoriDocumento12 pagineEserciziario Motorifrank_the_bangNessuna valutazione finora
- Tabella Rondelle 7435 PDFDocumento1 paginaTabella Rondelle 7435 PDFfrank_the_bangNessuna valutazione finora
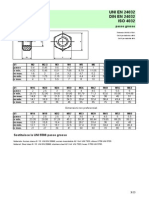
- Dadi Uni en 24032Documento1 paginaDadi Uni en 24032frank_the_bangNessuna valutazione finora
- Teoria Delle LastreDocumento26 pagineTeoria Delle Lastrefrank_the_bangNessuna valutazione finora
- Citazioni Bibliografiche. 02 - (AIB-WEB)Documento34 pagineCitazioni Bibliografiche. 02 - (AIB-WEB)frank_the_bangNessuna valutazione finora
- Modellazione Fem e Analisi Dinamica Di Un Generatore EolicoDocumento148 pagineModellazione Fem e Analisi Dinamica Di Un Generatore Eolicofrank_the_bangNessuna valutazione finora
- Il Sacro CoranoDocumento406 pagineIl Sacro Coranofrank_the_bangNessuna valutazione finora
- Codigo IvecoDocumento11 pagineCodigo IvecoDavidVazquez100% (1)
- Esercitazione 01 Prova Di Trazione Monoassiale PDFDocumento5 pagineEsercitazione 01 Prova Di Trazione Monoassiale PDFbladegpaNessuna valutazione finora
- 08 Dinamica RelativaDocumento14 pagine08 Dinamica RelativaMario StabileNessuna valutazione finora
- Diametro IdraulicoDocumento2 pagineDiametro IdraulicoAlessandro De SanctisNessuna valutazione finora
- Manuale D'Installazione Per L'Uso, L'Assistenza E La ManutenzioneDocumento39 pagineManuale D'Installazione Per L'Uso, L'Assistenza E La ManutenzioneIvica ŠućurNessuna valutazione finora
- Valvole Di Blocco A Semplice Effetto A 4 Vie Tipo A Vbpse A: Single Pilot Operated Check Valves Type ADocumento2 pagineValvole Di Blocco A Semplice Effetto A 4 Vie Tipo A Vbpse A: Single Pilot Operated Check Valves Type AHydromecanica HydecuaNessuna valutazione finora
- D.5 Relazione Di Calcolo StrutturaleDocumento71 pagineD.5 Relazione Di Calcolo StrutturalevttrlcNessuna valutazione finora
- Programma Di Tecnica Delle CostruzioniDocumento2 pagineProgramma Di Tecnica Delle CostruzioniGuillaumeHNONessuna valutazione finora
- Spicer Service Parts List 112-367 Drive Axle DelanteroDocumento20 pagineSpicer Service Parts List 112-367 Drive Axle DelanteroRene Ramos Meneses100% (1)
- Motore Stirling DidatticoDocumento0 pagineMotore Stirling DidatticoPaulo AzañeroNessuna valutazione finora
- Uso e Manut. 213 D4 - 08 PDFDocumento144 pagineUso e Manut. 213 D4 - 08 PDFJozef100% (1)