Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Ag p1
Caricato da
Christopher RamirezTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Ag p1
Caricato da
Christopher RamirezCopyright:
Formati disponibili
progetto
didattica in rete
p
r
o
g
e
t
t
o
d
i
d
a
t
t
i
c
a
i
n
r
e
t
e
Politecnico di Torino, maggio 2002
Dipartimento di Meccanica
Elementi finiti
Parte I
A. Gugliotta
otto editore
ELEMENTI FINITI
Parte I
A. GUGLIOTTA
POLITECNICO DI TORINO
WWW.POLITO.IT
i
INDICE I
1. CARATTERIZZAZIONE DEGLI ELEMENTI ...................... 1
1.1 E
LEMENTI
E
STRUTTURE
............................................................ 1
1.2 A
NALISI
MATRICIALE
ED
ELEMENTI
FINITI
................................. 3
1.3 C
ARATTERIZZAZIONE
DELL
'
ELEMENTO
TRAVE
.......................... 4
Elemento trave sollecitato assialmente (asta) ........................................5
Elemento trave sollecitato a torsione (barra di torsione) ......................6
Elemento trave sollecitato a essione (trave inessa) ............................8
1.4 F
ORMULAZIONE
DI
RIGIDEZZA
................................................ 14
1.5 S
IGNIFICATO
FISICO
DEI
COEFFICIENTI
DELLA
MATRICE
DI
RIGIDEZZA
................................................................................ 16
1.6 S
ISTEMI
DI
RIFERIMENTO
LOCALE
E
GLOBALE
.......................... 18
1.7 E
LEMENTO
TRAVE
NEL
PIANO
.................................................. 25
1.8 E
LEMENTO
TRAVE
PER
STRUTTURE
A
GRIGLIA
......................... 27
1.9 E
LEMENTO
TRAVE
NELLO
SPAZIO
............................................ 31
1.10 C
ARICHI
NODALI
EQUIVALENTI
............................................... 33
Elemento asta: carico distribuito .......................................................33
Elemento asta: effetto termico ...........................................................34
Elemento asta: montaggio con interferenza o gioco........................... 34
Elemento asta: carico concentrato .....................................................35
Elemento trave inessa: carico distribuito.......................................... 36
Elemento trave inessa: gradiente termico......................................... 37
Elemento trave inessa: carichi concentrati .......................................38
Trave nel piano; carichi nodali equivalenti .........................................38
ii
2. CARATTERIZZAZIONE DELLA STRUTTURA ................43
2.1 V
ARIABILI
ED
EQUAZIONI
STRUTTURA
..................................... 43
2.2 A
SSEMBLAGGIO
DELLE
EQUAZIONI
STRUTTURA
....................... 46
2.3 C
ALCOLO
DEGLI
SPOSTAMENTI
INCOGNITI
............................. 56
2.4 V
INCOLI
CINEMATICI
............................................................... 60
Approssimazione con molle............................................................... 60
Modica della mappa ........................................................................61
Modica della matrice di rigidezza ....................................................64
2.5 P
ROBLEMI
PARTICOLARI
RELATIVI
AI
VINCOLI
......................... 66
Vincoli elastici ...................................................................................66
Strutture con cerniere interne ............................................................68
2.6 C
ALCOLO
DELLE
TENSIONI
...................................................... 70
2.7 S
CHEMA
DI
RISOLUZIONE
........................................................ 72
2.8 P
ROBLEMA
DINAMICO
:
CALCOLO
DELLE
FREQUENZE
PROPRIE
.... 73
2.9 S
OLUZIONE
DEL
SISTEMA
DI
EQUAZIONI
................................. 80
Metodi di soluzione indiretti: metodo di Gauss-Seidel ......................81
Metodi di soluzione diretti: metodo di Gauss.................................... 82
1
1. CARATTERIZZAZIONE DEGLI ELEMENTI
1.1 E
LEMENTI
E
STRUTTURE
Una struttura o un suo componente vengono normalmente studiati dal progetti-
sta scomponendoli in parti semplici delle quali sono note le propriet, tenendo
inoltre presenti come queste parti siano collegate per formare l'insieme totale.
Questa suddivisione pu essere effettuata in una maniera che si pu denire
naturale
, come per esempio nel caso di una struttura di acciaio composta di travi
unite mediante cerniere o ganasce serrate con bulloni; il fatto che la
struttura
(g.
1.1
) sia scomponibile nei suoi
elementi
trave (g.
1.2
) sembra ovvio e natu-
rale perch all'operazione matematica del considerare la struttura divisibile ai ni
del calcolo strutturale corrisponde la nostra conoscenza pratica del fatto che per
arrivare alla
struttura
si uniscono assieme
elementi
trave, prodotti singolarmente
ed immagazzinabili separatamente.
Fig. 1.1
Struttura di travi.
Analogamente, un oleodotto o un metanodotto o una condotta idraulica in
acciaio sono ottenuti saldando assieme pi tubi, e risulta pertanto naturale pen-
sare tale struttura come un insieme di
elementi tubi
.
CARATTERIZZAZIONE
DEGLI
ELEMENTI
2
Fig. 1.2
Elemento trave.
Quando per i singoli tubi sono uniti l'uno all'altro mediante una saldatura che
ricostituisca completamente la continuit meccanica la suddivisione naturale in
elementi perde senso: un tale sistema tubiero potrebbe venir diviso in elementi
sia eseguendo idealmente tagli in corrispondenza delle saldature sia immagi-
nando di tagliare in punti nei quali una giunzione in realt non esiste.
Nel secondo caso la divisione in elementi della struttura meno naturale e pi
arbitraria, ed ha sostanzialmente un carattere o convenzionale o di convenienza.
Le propriet della struttura calcolata dopo la sua divisione in elementi sono
comunque invarianti al variare del tipo di suddivisione.
Avanzando nel livello di astrazione, si pu immaginare di avere un organo mecca-
nico di forma semplice, come un disco di turbina (g.
1.3
); anche un tale oggetto
pu, per il progettista, essere una struttura composta di elementi opportuni.
Fig. 1.3
Disco di turbina.
naturale forse considerare il mozzo estendentesi dal raggio
r
a
al raggio
r
b
e la
corona estendentesi dal raggio
r
c
al raggio
r
d
come elementi distinti dal resto del
disco a prolo conico (g.
1.4
). Ragionando per sulla parte a sezione conica, si
ammetta di scoprire che le leggi matematiche che ne deniscono le propriet
siano troppo difcili (cio praticamente indesiderabili) da scrivere; si immagini
inoltre che tali leggi siano facili da scrivere, magari in maniera accettabilmente
approssimata, per un elemento di estensione radiale opportuna
r
. Ne segue una
suddivisione convenzionale ed arbitraria del disco conico in pi elementi, come
illustrato in gura
1.4c
.
CARATTERIZZAZIONE
DEGLI
ELEMENTI
3
Con opportune cautele l'insieme degli elementi cos deniti pu simulare in
modo soddisfacente le propriet della struttura originaria.
A questo proposito bene aver chiaro che si hanno due casi fondamentali:
la caratterizzazione dell'elemento esatta
la caratterizzazione dell'elemento approssimata
Fig. 1.4
Elementi di un disco di turbina.
Nel primo caso qualunque sia la suddivisione della struttura in elementi, i risul-
tati devono essere sempre gli stessi, rigorosamente; pertanto il tipo di suddivi-
sione in elementi deve soddisfare solo esigenze di comodit.
Nel secondo caso invece la scelta del tipo di suddivisione inuenza i risultati,
dato che la soluzione complessiva per l'intera struttura dipende dalle approssi-
mazioni contenute nelle leggi che caratterizzano i singoli elementi: in questo
caso il tipo di suddivisione deve essere esaminato anche alla luce della approssi-
mazione dei risultati, in un compromesso ragionato con l'economia del calcolo.
1.2 A
NALISI
MATRICIALE
ED
ELEMENTI
FINITI
La sistematizzazione delle relazioni matematiche descriventi una struttura pu
essere eseguita in diversi modi; esempi classici sono il metodo delle differenze
nite, il metodo di trasferimento, metodi variazionali come il metodo di Ritz.
Sebbene il metodo degli elementi niti abbia in comune alcune caratteristiche
con i metodi precedentemente illustrati, esso indubbiamente diventato uno dei
pi utilizzati dagli ingegneri.
Lo sviluppo del metodo degli elementi niti coinciso essenzialmente con lo svi-
luppo dei calcolatori elettronici, anche se le sue basi matematiche si possono far
risalire ad anni addietro (Courant, 1943); importanti contributi si possono tro-
vare nei lavori di Turner, Clough, Martin e Topp (1956), Argyris (1960), ecc.
CARATTERIZZAZIONE
DEGLI
ELEMENTI
4
Inizialmente il metodo fu sviluppato per l'analisi di problemi di meccanica strut-
turale; fu tuttavia ben presto scoperto che il metodo aveva una validit ben pi
generale ed ad oggi applicato alla soluzione di una gran variet di problemi.
Tuttavia in questo testo ci si occuper unicamente del calcolo dello stato di ten-
sione in elementi e strutture, quali quelle che si trovano ordinariamente nel
campo d'azione del costruttore di macchinari o del progettista strutturale.
Una delle formulazioni pi utilizzate nell'analisi strutturale quella che si basa
sugli spostamenti assegnati: essa pu essere inizialmente vista come un'esten-
sione dell'analisi matriciale delle strutture formate da barre e/o travi (analisi con
il metodo degli spostamenti).
Analogamente al metodo degli elementi niti, l'analisi matriciale delle strutture
sar qui considerata nelle sue due fasi distinte:
la caratterizzazione degli elementi, cio la descrizione matematica della
loro climatica in relazione alle loro condizioni di equilibrio e di defor-
mazione
la costruzione della struttura, cio la formulazione matematica delle
equazioni che esprimono l'appartenenza dell'elemento ad una data
struttura, e la soluzione del sistema di equazioni
Nelle pagine che seguono si adotter la seguente convenzione:
tutte le variabili che servono a denire il comportamento del singolo
elemento, indipendentemente dalla sua appartenenza ad una struttura,
vengono indicate con lettere minuscole
tutte le variabili che servono a denire il comportamento dei punti
(nodi) della struttura in cui gli elementi si uniscono, vengono indicate
con lettere maiuscole
1.3 C
ARATTERIZZAZIONE
DELL
'
ELEMENTO
TRAVE
Per elemento trave si intende un elemento, ad asse inizialmente rettilineo, indivi-
duato dai due estremi (
nodi
) 1 e 2 attraverso i quali l'elemento scambia le azioni
con l'esterno (g.
1.5
).
Fig. 1.5
Elemento trave.
CARATTERIZZAZIONE
DEGLI
ELEMENTI
5
All'elemento trave associato un sistema di riferimento locale (
x, y, z
) in cui
l'asse
x
coincide con l'asse dell'elemento ed diretto dal nodo 1 al nodo 2; gli
assi
y
e sono perpendicolari all'asse
x
e coincidono con le direzioni principali
d'inerzia della sezione retta della trave.
L'elemento trave pu comportarsi, in base ai carichi a cui soggetto, come:
1. asta, o puntone-tirante, se sollecitato da soli carichi assiali
2. barra di torsione, se sollecitato dal solo momento torcente
3. trave inessa, se sollecitato da soli sforzi di taglio e/o momenti ettenti
Verranno qui ricavate le formulazioni di rigidezza dell'elemento trave, nelle sue
possibili congurazioni di base, a partire dalle equazioni di equilibrio e di defor-
mazione.
1.3.1 Elemento trave sollecitato assialmente (asta)
Per analizzare il suo comportamento baster studiare i soli spostamenti
u
secondo la direzione dell'asse
x
, dato che dopo deformazione l'asse rimane rettili-
neo (g.
1.6
).
Fig. 1.6
Elemento asta.
Dette
f
u
1
e
f
u
2
le risultanti delle distribuzioni di forze che dall'esterno vengono
applicate agli estremi dell'elemento e
u
1
e
u
2
gli spostamenti dei nodi, l'elemento
asta caratterizzato da una equazione di equilibrio:
1.1
e dall'equazione differenziale:
1.2
avendo indicato con
u
lo spostamento assiale della trave,
f
u
la forza assiale agente
nella generica sezione della trave,
E
il modulo elastico longitudinale e con
A
l'area della sezione retta della trave.
La
1.2
, integrata sulla lunghezza
l
dell'elemento fornisce, supponendo costanti la
forza assiale e l'area della sezione retta:
f
u1
f
u2
0
u d
x d
-----
f
u
EA
-------
CARATTERIZZAZIONE
DEGLI
ELEMENTI
6
1.3
Le equazioni
1.1
e
1.3
forniscono tutte le informazioni necessarie a denire il
comportamento statico dell'elemento asta, dal punto di vista del suo
contorno
(cio i nodi); queste equazioni possono essere riscritte in forma matriciale:
1.4
Moltiplicando la prima riga per -
l/EA
, sommando alla seconda e sostituendo al
posto della prima:
1.5
da cui:
1.6
ovvero:
1.7
detta formulazione di rigidezza, dove:
1.8
1.9
1.10
1.3.2 Elemento trave sollecitato a torsione (barra di torsione)
L'elemento barra di torsione formalmente analogo all'elemento asta visto al
paragrafo 1.3.1.
u
2
u
1
l
EA
------- f
u2
0 0
1 1
u
1
u
2
1 1
0
l
EA
-------
f
u1
f
u2
1 1
1 1
u
1
u
2
l
EA
-------
1
0
l
EA
-------
f
u1
f
u2
EA
l
-------
1 1
1 1
u
1
u
2
f
u1
f
u2
k [ ] s { } f } {
k [ ]
EA
l
-------
1 1
1 1
s { }
T
u
1
u
2
{ }
f } {
T
f
u1
f
u2
{ }
CARATTERIZZAZIONE DEGLI ELEMENTI
7
Si tratta di un elemento ad asse rettilineo capace di resistere a soli momenti tor-
centi (g. 1.7).
Fig. 1.7 Elemento barra di torsione.
Detti m
x1
e m
x2
i momenti torcenti applicati ai nodi 1 e 2 dell'elemento e
x1
e
x2
gli angoli di rotazione delle sezioni di estremit, l'elemento barra di torsione
caratterizzato da una equazione di equilibrio:
1.11
e dall'equazione differenziale:
1.12
avendo indicato con
x
la rotazione assiale della trave; m
x
il momento torcente
agente nella generica sezione della trave; G il modulo elastico di taglio; J
x
il
momento d'inerzia polare rispetto all'asse della trave.
La 1.12, integrata sulla lunghezza l della barra, fornisce, supponendo costanti il
momento torcente e le caratteristiche geometriche della barra:
1.13
Le 1.11 e 1.13 scritte in forma matriciale sono:
1.14
La formulazione di rigidezza, ottenuta con un procedimento analogo a quello
utilizzato per l'elemento asta, :
1.15
m
x1
m
x2
0
d
x d
------
m
x
GJ
x
--------
x2
x1
l
GJ
x
--------m
x2
0 0
1 1
x1
x2
1 1
0
l
GJ
x
--------
m
x1
m
x2
GJ
x
l
--------
1 1
1 1
x1
x2
m
x1
m
x2
CARATTERIZZAZIONE DEGLI ELEMENTI
8
1.3.3 Elemento trave sollecitato a essione (trave inessa)
Si considerano solo carichi e vincoli agenti ortogonalmente alla linea d'asse
(g. 1.8) in modo che gli spostamenti dei punti della struttura avvengano in
direzione ortogonale all'asse indeformato (entro i limiti di approssimazione della
teoria delle travi inesse); nella congurazione deformata la struttura resta
quindi descrivibile in funzione della sola coordinata misurata sulla linea d'asse
indeformata. Si trascureranno inoltre, almeno inizialmente, le deformazioni
dovute al taglio.
Fig. 1.8 Elemento trave inflessa.
Siano v
1
e
z1
la freccia e la rotazione misurate al nodo 1, v
2
e
z2
la freccia e la
rotazione al nodo 2; siano inoltre f
v1
e m
z1
la forza ed il momento che
dall'esterno vengono applicati all'elemento nel nodo 1, e f
v2
e m
z2
la forza ed il
momento applicati dall'esterno al nodo 2.
Le variabili da considerare sono ora le quattro variabili cinematiche (spostamenti
e rotazioni) v
1
,
z1
, v
2
,
z2
misurabili ai nodi, ed i quattro carichi f
v1
, m
z1
, f
v2
,
m
z2
che dall'esterno vengono applicati nei nodi dell'elemento.
Le relazioni che legano fra di loro queste otto variabili sono quattro; due delle
quattro relazioni cercate sono le equazioni di equilibrio. L'equazione di equili-
brio alla traslazione :
1.16
e quella di equilibrio alla rotazione rispetto ad un punto scelto, per semplicit,
coincidente con il nodo 2:
1.17
Le rimanenti due equazioni sono relazioni che esprimono spostamenti e rota-
zioni relative degli estremi in funzione di forze e momenti; esse vengono ricavate
dall'equazione differenziale:
f
v1
f
v2
0
f
v1
l m
z1
m
z2
0
CARATTERIZZAZIONE DEGLI ELEMENTI
9
1.18
avendo indicato con
z
la rotazione della sezione retta della trave; m
z
il
momento ettente nella generica sezione della trave; E il modulo elastico longi-
tudinale; J
z
il momento d'inerzia trasversale.
Esprimendo m
z
, momento in una sezione generica, in funzione di f
v1
e m
z1
, e
integrando sulla lunghezza l dell'elemento si ottengono le relazioni:
1.19
1.20
Le quattro equazioni formano perci il seguente sistema:
1.21
ovvero:
1.22
dove {s} e { f } sono rispettivamente i vettori degli spostamenti e delle forze:
1.23
1.24
e [a] e [b] sono matrici di ordine 4x4 che premoltiplicano rispettivamente il vet-
tore degli spostamenti ed il vettore delle forze. Si noti che la matrice [b] non
singolare, mentre la matrice [a] lo due volte, cio in un numero pari ai gradi di
libert di moto rigido dell'elemento; nelle 1.5 e 1.14 si vericava una situazione
analoga, caratterizzata da una sola singolarit.
La scrittura di rigidezza viene ricavata premoltiplicando ambo i membri della
1.22 per l'inversa della matrice [b]. A calcoli effettuati si ottiene:
d
x d
------
m
z
EJ
z
--------
z2
z1
l
EJ
z
--------m
z1
l
2
2EJ
z
----------- f
v1
v
2
v
1
z1
l
l
2
2EJ
z
------------ m
z1
l
3
6EJ
z
------------ f
v1
0 0 0 0
0 0 0 0
0 1 0 1
1 l 1 0
v
1
z1
v
2
z2
1 0 1 0
l 1 0 1
l
2
2EJ
z
-----------
l
EJ
z
-------- 0 0
l
3
6EJ
z
-----------
l
2
2EJ
z
----------- 0 0
f
v1
m
z1
f
v2
m
z2
a [ ] s { } b [ ] f } {
s { }
T
v
1
z1
v
2
z2
{ }
f } {
T
f
v1
m
z1
f
v2
m
z2
{ }
CARATTERIZZAZIONE DEGLI ELEMENTI
10
1.25
Effetto del taglio
L'equazione della linea elastica 1.20 tiene conto soltanto della deformazione pro-
dotta dal momento ettente e non di quella prodotta dallo sforzo di taglio; nel
caso di travi snelle ci non produce un errore sensibile, perch la seconda
molto piccola rispetto alla prima.
Tuttavia nel caso di travi tozze, in cui il rapporto tra lunghezza e altezza della
sezione piccolo, l'effetto del taglio non risulta pi trascurabile; nell'equazione
differenziale della linea elastica bisogner sommare al contributo del momento
ettente quello dovuto allo sforzo di taglio.
Lo spostamento di un punto della trave sar dato dalla somma dello sposta-
mento v
m
dovuto al momento ettente e dello spostamento v
t
dovuto al taglio
(g. 1.9):
Fig. 1.9 Effetto del taglio sulla linea elastica.
EJ
z
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
4
l
---
6
l
2
-----
2
l
---
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
2
l
---
6
l
2
-----
4
l
---
v
1
z1
v
2
z2
f
v1
m
z1
f
v2
m
z2
CARATTERIZZAZIONE DEGLI ELEMENTI
11
1.26
Se
y
rappresenta la deformazione media dovuta al taglio, la relazione che lega la
rotazione
z
della sezione e la pendenza dell'asse neutro :
1.27
e la deformazione
y
data da:
1.28
dove c
y
il fattore di taglio della sezione in direzione dell'asse y.
La 1.19, scritta tra l'estremo 1 e la generica sezione allascissa x diviene allora:
1.29
sostituendo per
z
la 1.27:
1.30
e la 1.28 al posto di
y
e integrando sulla lunghezza l della trave, la 1.20 diviene:
1.31
Le equazioni risolutive 1.21 diventano quindi:
1.32
e la matrice di rigidezza:
v v
m
v
t
v x
v d
x d
-----
z
y
y
y
f
v2
GA
--------
y
f
v1
GA
--------
z
z1
x
EJ
z
-------- m
z1
x
2
2EJ
z
----------- f
v1
v d
dx
-----
y
z1
x
EJ
z
-------- m
z1
x
2
2EJ
z
------------ f
v1
v
2
v
1
z1
l
l
2
2EJ
z
----------- m
z1
l
3
6EJ
z
----------- f
v1
yl
GA
-------- f
v1
0 0 0 0
0 0 0 0
0 1 0 1
1 l 1 0
v
1
z1
v
2
z2
1 0 1 0
l 1 0 1
l
2
2EJ
z
------------
l
EJ
z
--------
0 0
l
3
6EJ
z
------------
yl
GA
--------
l
2
2EJ
z
------------
0 0
f
v1
m
z1
f
v2
m
z2
CARATTERIZZAZIONE DEGLI ELEMENTI
12
1.33
dove
y
vale:
1.34
La tabella 1.1 riporta i valori dei fattori di taglio per i casi pi frequenti.
EJ
z
1
y
-----------------
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
4
y
l
-----------------
6
l
2
-----
2
y
l
-----------------
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
2
y
l
-----------------
6
l
2
-----
4
y
l
-----------------
v
1
z1
v
2
z2
f
v1
m
z1
f
v2
m
z2
y
12EJ
z
GAl
2
--------------
CARATTERIZZAZIONE DEGLI ELEMENTI
13
Tab. 1.1 Fattori di taglio per alcune forme di sezione di travi inesse, da Cowper
G.R., The Shear Coefcient in Timoshenko's Beam Theory, Journ. of Appl. Mech.,
giugno 1966, p. 335-340
7 6
6 1 ( )
----------------------
7 6 ( ) 1 m ( )
2
4m5 3 ( )
6 1 ( ) 1 m
2
( )
2
-----------------------------------------------------------------------------------
m b a
12 11
10 1 ( )
-------------------------
40 37 m16 10 ( ) m
2
12 1 ( ) 3 m ( )
----------------------------------------------------------------------------------
m b a
4 3
2 1 ( )
----------------------
48 39
20 1 ( )
-------------------------
p q
10n
2
m3 ( ) 3m
2
[ ]
10 1 ( ) 1 3m ( )
2
------------------------------------------------------------------------------------
m bs
b
hs
a
n b h
p q
30n
2
m1 m ( ) 5n
2
m8 9m ( )
10 1 ( ) 1 3m ( )
2
---------------------------------------------------------------------------------------------------------------
m 2bs
b
hs
a
n b h
p q
10 1 ( ) 1 3m ( )
2
---------------------------------------------------
m 2 A
s
hs
p
'
q'
30n
2
m1 m ( ) 10n
2
m4 5m m
2
( )
10 1 ( ) 1 3m ( )
2
-----------------------------------------------------------------------------------------------------------------------------------
m bs
b
hs
a
n b h
p 12 72m 150m
2
90m
3
p' 12 96m 276m
2
192m
3
q 11 66m 135m
2
90m
3
q' 11 88m 248m
2
216m
3
CARATTERIZZAZIONE DEGLI ELEMENTI
14
1.4 FORMULAZIONE DI RIGIDEZZA
Nei paragra precedenti si visto che un elemento caratterizzato da un numero
n di equazioni pari al numero di gradi di libert cinematici (numero degli sposta-
menti e/o rotazioni deniti ai nodi dell'elemento).
Le n equazioni complessive, delle quali L sono di equilibrio, legano fra di loro 2n
variabili: n forze generalizzate ed n spostamenti generalizzati; nelle L equazioni
di equilibrio non compaiono ovviamente spostamenti generalizzati.
Dette n equazioni che caratterizzano l'elemento possono essere ordinate in modi
differenti; in particolare si pu pensare di separare al primo membro tutti gli
spostamenti generalizzati ed al secondo membro tutte le forze generalizzate. In
notazione matriciale:
1.35
Se l'elemento non innitamente rigido, nessuna delle equazioni priva di forze
generalizzate, e pertanto nessuna riga in [ b] nulla. Inoltre, poich le equazioni
sono indipendenti, esiste l'inversa della matrice [ b]; premoltiplicando ambo i
membri della 1.35 per [b]
1
:
1.36
e quindi per la denizione stessa di matrice inversa:
1.37
La 1.37 una scrittura di rigidezza, in quanto le forze generalizzate compaiono
isolate, ovvero sono espresse in funzione esplicita degli spostamenti. Posto:
1.38
la 1.37 si scrive:
1.39
La matrice [k] detta di rigidezza in quanto ad un aumento del valore dei suoi
coefcienti corrisponde un aumento della rigidezza dell'elemento; infatti a parit
spostamento {s} valori di [k] crescenti implicano forze { f } crescenti.
Un'altra possibile scrittura delle equazioni 1.35 quella detta di deformabilit.
Se i gradi di libert di moto rigido L sono zero, allora nessuna delle righe della
matrice [a] zero, e pertanto esiste l'inversa [a]
1
; premoltiplicando per essa
ambo i membri della 1.35, si ottiene:
1.40
Posto:
1.41
a [ ] s { } b [ ] f } {
b [ ]
1
a [ ] s { } b [ ]
1
b [ ] f } {
b [ ]
1
a [ ] s { } I [ ] f } {
k [ ] b [ ]
1
a [ ]
k [ ] s { } f } {
s { } a [ ]
1
b [ ] f } {
d [ ] a [ ]
1
b [ ]
CARATTERIZZAZIONE DEGLI ELEMENTI
15
la 1.40 diviene:
1.42
La matrice [d] detta di deformabilit in quanto ad un aumento del valore dei
suoi coefcienti corrisponde un aumento della deformabilit dell'elemento;
infatti a parit di forza { f } valori di [d] crescenti implicano spostamenti {s} cre-
scenti.
Nell'ambito del calcolo strutturale sempre possibile ottenere la formulazione di
rigidezza, ma non di ottenere quella di deformabilit, a parte il caso di alcuni ele-
menti particolari nei quali sono gi posti vincoli addizionali che eliminano i
gradi di libert di moto rigido.
Pu essere utile esaminare da un punto di vista sico il caso degli elementi aventi
gradi di libert di moto rigido:
se esistesse la scrittura di deformabilit 1.42 si potrebbe pensare di
inserire in { f } forze arbitrarie e quindi ottenere gli spostamenti; ci
sarebbe assurdo in quanto la 1.42 contiene le equazioni di equilibrio
che legano fra di loro le forze generalizzate, le quali pertanto non pos-
sono essere assegnate arbitrariamente
ponendo eventualmente nella 1.42 dei carichi equilibrati, si otterreb-
bero come soluzione gli spostamenti; ci assurdo in quanto assegnati
i carichi agli estremi, non esiste una ed una sola soluzione per i valori
degli spostamenti bens innite e differenti fra di loro per una trasla-
zione e/o rotazione rigida
ESEMPIO 1.1
Nei casi dell'elemento trave sollecitato assialmente, sollecitato a torsione e
sollecitato a essione, la 1.35 data rispettivamente dalle 1.4, 1.14 e 1.21.
1.43
1.44
1.45
s { } d [ ] f } {
0 0
1 1
u
1
u
2
1 1
0
l
EA
-------
f
u1
f
u2
0 0
1 1
x1
x
2
1 1
0
l
GJ
x
---------
m
x1
m
x2
0 0 0 0
0 0 0 0
0 1 0 1
1 l 1 0
v
1
z1
v
2
z2
1 0 1 0
l 1 0 1
l
2
2EJ
z
------------
l
EJ
z
--------
0 0
l
3
6EJ
z
------------
l
2
2EJ
z
------------ 0 0
f
v1
m
z1
f
v2
m
z2
CARATTERIZZAZIONE DEGLI ELEMENTI
16
Si nota che la matrice non mai singolare, mentre la matrice sin-
golare 1 volta nei casi dell'elemento asta e dell'elemento barra di torsione e 2
volte nel caso dell'elemento trave inessa. Infatti nei primi due casi l'ele-
mento possiede un grado di libert di moto rigido (traslazione secondo
lasse il primo, rotazione attorno l'asse il secondo); nel terzo caso l'ele-
mento possiede 2 gradi di libert di moto rigido (traslazione secondo l'asse
e rotazione attorno l'asse ).
1.5 SIGNIFICATO FISICO DEI COEFFICIENTI DELLA MATRICE DI RIGIDEZZA
Nel metodo di rigidezza le equazioni che caratterizzano l'elemento vengono
combinate linearmente in modo da esplicitare i carichi. Si hanno cos per l'ele-
mento generico espressioni del tipo:
1.46
dove [k] la matrice di rigidezza dell'elemento; { s} il vettore degli spostamenti
generalizzati dell'elemento; { f } il vettore dei carichi generalizzati dell'elemento.
La matrice di rigidezza pu essere determinata o direttamente mediante il princi-
pio dei lavori virtuali oppure mediante combinazioni lineari a partire dalle equa-
zioni di equilibrio e deformazione. Per alcuni elementi si potrebbe anche pensare
di determinare la matrice di rigidezza per via sperimentale.
Riferendosi all'elemento trave inessa si dimostrer come, a partire dalle equa-
zioni che esprimono spostamenti e rotazioni di una trave e dalle equazioni di
equilibrio, sia possibile legare i quattro spostamenti e rotazioni misurabili
all'estremo della trave stessa con le forze ed i momenti esercitati dall'esterno sulla
trave in tali estremi, avendo misurato in particolare sia gli spostamenti e le rota-
zioni sia le forze ed i momenti secondo un unico sistema di riferimento opportu-
namente scelto.
Nella scrittura di rigidezza della trave:
1.47
le singole colonne godono di una interpretazione sica. La prima colonna, ad
esempio, fornisce, moltiplicata per v
1
, forze e momenti che dall'esterno devono
essere esercitati afancassi abbia il solo spostamento v
1
e tutti gli altri nulli. La
prima colonna cio fornisce le reazioni vincolari nella congurazione della
gura 1.10. Analogamente la seconda colonna, moltiplicata per
z1
, la terza
moltiplicata per v
2
e la quarta moltiplicata per
z2
forniscono le reazioni vinco-
b [ ] a [ ]
L
x x
L
y z
k [ ] s { } f } {
a b a b
b c b d
a b a b
b d b c
v
1
z1
v
2
z2
f
v1
m
z1
f
v2
m
z2
CARATTERIZZAZIONE DEGLI ELEMENTI
17
lari nelle congurazioni delle gure 1.11, 1.12, 1.13.
Fig. 1.10 Prima colonna della matrice di rigidezza della trave inflessa.
Fig. 1.11 Seconda colonna della matrice di rigidezza della trave inflessa.
Fig. 1.12 Terza colonna della matrice di rigidezza della trave inflessa.
CARATTERIZZAZIONE DEGLI ELEMENTI
18
Fig. 1.13 Quarta colonna della matrice di rigidezza della trave inflessa.
Sovrapponendo i quattro stati di deformazione distinti deniti nelle gure da
1.10 a 1.13 si pu ottenere uno stato di deformazione qualsiasi. Si pu pensare
quindi di ottenere la matrice di rigidezza colonna per colonna, cio imponendo
ad ogni variabile cinematica nodale una variazione unitaria e determinando forze
e momenti nodali necessari a produrla. Queste considerazioni esemplicative,
valide per travi inesse, si estendono naturalmente a qualsiasi altro tipo di ele-
mento.
1.6 SISTEMI DI RIFERIMENTO LOCALE E GLOBALE
Nel denire le equazioni che legano tra loro le variabili cinematiche e statiche di
un elemento pu essere conveniente, per una maggior semplicit del calcolo, uti-
lizzare un particolare sistema di riferimento.
Questo particolare sistema di riferimento verr detto locale in quanto stretta-
mente connesso all'elemento di cui si sono denite le propriet. Pertanto le com-
ponenti delle variabili cinematiche generalizzate (spostamenti, rotazioni) e quelle
delle variabili statiche generalizzate (forze e momenti) verranno espresse secondo
gli assi di tale riferimento.
Fig. 1.14 Elemento trave nel piano.
CARATTERIZZAZIONE DEGLI ELEMENTI
19
Un esempio semplice di un siffatto sistema di riferimento si ha nel caso della trave
nel piano; noto che la forma delle equazioni che legano i carichi agli spostamenti
risulta pi semplice se si adotta un sistema di riferimento locale in cui l'asse xcoin-
cide con l'asse geometrico e l'asse y ad esso ortogonale. Con riferimento alla
gura 1.14, si indicano con u gli spostamenti secondo x, con v gli spostamenti
secondo ye con
z
le rotazioni (dette rotazioni possono pensarsi come un vettore
ortogonale al piano xy); analogamente si avranno forze f
u
, f
v
, m
z
.
Quando poi si considera una struttura, in generale composta da pi elementi
variamente orientati nel piano o nello spazio, occorre esprimere tutti gli sposta-
menti generalizzati e tutte le forze generalizzate in un unico sistema di riferi-
mento, altrimenti non si potrebbero scrivere le equazioni scalari che li legano.
Fig. 1.15 Sistemi di riferimento locale e globale.
Occorre quindi effettuare un cambiamento di riferimento per passare dal sistema
cartesiano locale x,y,z al sistema cartesiano globale X,Y,Z valido per tutta la
struttura. Dato che un cambiamento di riferimento una trasformazione lineare,
l'insieme di tutti gli spostamenti generalizzati { s
x
} nel sistema locale x,y,z
(g. 1.15):
1.48
legato all'insieme delle stesse variabili { s
X
} nel sistema globale X,Y,Z:
1.49
dalle relazioni lineari:
s { }
x
T
u
x
v
x
w
x
, , { }
s { }
X
T
u
X
v
X
w
X
, , { }
CARATTERIZZAZIONE DEGLI ELEMENTI
20
1.50
dove (l
1
, m
1
, n
1
), (l
2
, m
2
, n
2
), (l
3
, m
3
, n
3
), sono rispettivamente i coseni direttori
degli assi x,y,z rispetto agli assi del sistema di riferimento globale X,Y,Z. Valgono
le relazioni:
1.51
e:
1.52
In notazione matriciale la 1.50 :
1.53
e la matrice di rotazione [R] data da:
1.54
Analoga trasformazione permette di legare il vettore dei carichi { f }
x
a { f }
X
.
Ovviamente esiste anche la trasformazione inversa della 1.53:
1.55
La matrice di rotazione [R] una matrice ortogonale dato che
; ne segue che:
1.56
per cui:
1.57
Nel caso bidimensionale (strutture piane) si rendono necessarie le trasformazioni
in un solo piano, generalmente coincidente con il piano x,y. In questo caso la
matrice di rotazione assume la forma:
u
x
l
1
u
X
m
1
v
X
n
1
w
X
v
x
l
2
u
X
m
2
v
X
n
2
w
X
w
x
l
3
u
X
m
3
v
X
n
3
w
X
l
i
2
m
i
2
n
i
2
1 i 1 2 3 , , ( )
l
i
l
j
m
i
m
j
n
i
n
j
0
i 1 2 3 , ,
i j
j 1 2 3 , ,
s { }
x
R [ ] s { }
X
R [ ]
l
1
m
1
n
1
l
2
m
2
n
2
l
3
m
3
n
3
s { }
X
R [ ]
1
s { }
x
R [ ]
T
R [ ]
R [ ] R [ ]
T
I [ ]
R [ ]
1
R [ ]
T
s { }
X
R [ ]
T
s { }
x
CARATTERIZZAZIONE DEGLI ELEMENTI
21
1.58
ESEMPIO 1.2
Con riferimento alla trave inessa di gura 1.14 e riportata in una posizione
generica nel sistema di riferimento globale di gura 1.16, i coseni diret-
tori sono dati da:
1.59
Fig. 1.16 Sistemi di riferimento locale e globale.
Il vettore degli spostamenti all'estremo 2 si trasforma secondo la legge:
1.60
Uguale relazione vale per
all'altro estremo 1; considerando separa-
tamente l'estremo 1 dall'estremo 2, si ha:
1.61
1.62
R [ ]
l
1
m
1
0
l
2
m
2
0
0 0 1
XY ,
l
1
m
1
n
1
, , ( ) l
2
m
2
n
2
, , ( ) ,
l
1
cos m
1
90 ( ) cos sin
l
2
90 ( ) cos sin m
2
cos
u
2
v
2
z2
x
cos sin 0
sin cos 0
0 0 1
u
2
v
2
z2
X
u
1
v
1
a
z1
, ,
s
1
{ }
x
R
1
[ ] s
1
{ }
X
s
2
{ }
x
R
2
[ ] s
2
{ }
X
s
1
{ }
s
2
{ }
x
R
1
[ ] 0
0 R
2
[ ]
s
1
{ }
s
2
{ }
X
CARATTERIZZAZIONE DEGLI ELEMENTI
22
che sinteticamente pu scriversi:
1.63
Esplicitando:
1.64
Analogamente per le trasformazioni riguardanti i carichi:
1.65
Sostituendo le variabili elemento espresse nel sistema globale nelle equazioni
elemento, si caratterizza l'elemento ruotato in una posizione qualsiasi
(g. 1.16). Si noti che anche dopo la rotazione nel sistema di riferimento glo-
bale sono state mantenute per spostamenti e forze le lettere minu-
scole; ci allo scopo di ricordare che si tratta ancora di variabili elemento.
La matrice di rigidezza dell'elemento scritta nel sistema di riferimento globale
viene quindi ottenuta a partire dalla scrittura di rigidezza per l'elemento nel
sistema di riferimento locale associato all'elemento stesso:
1.66
e dalle relazioni che permettono di ottenere sia le componenti degli spostamenti
generalizzati sia delle forze generalizzate nel sistema di riferimento locale note
quelle nel sistema di riferimento globale:
1.67
1.68
Sostituendo le 1.67 e la 1.68 nella 1.66 si ha:
1.69
s { }
x
R [ ] s { }
X
u
1
v
1
z1
u
2
v
2
z2
x
cos sin 0 0 0 0
sin cos 0 0 0 0
0 0 1 0 0 0
0 0 0 cos sin 0
0 0 0 sin cos 0
0 0 0 0 0 1
u
1
v
1
z1
u
2
v
2
z2
X
f
u1
f
v1
m
z1
f
u2
f
v2
m
z2
x
cos sin 0 0 0 0
sin cos 0 0 0 0
0 0 1 0 0 0
0 0 0 cos sin 0
0 0 0 sin cos 0
0 0 0 0 0 1
f
u1
f
v1
m
z1
f
u2
f
v2
m
z2
X
XY Z , ,
k [ ]
x
s { }
x
f } {
x
s { }
x
R [ ] s { }
X
f } {
x
R [ ] f } {
X
k [ ]
x
R [ ] s { }
X
R [ ] f } {
X
CARATTERIZZAZIONE DEGLI ELEMENTI
23
e, premoltiplicando ambo i membri per [R]
1
:
1.70
ovvero:
1.71
in cui [k]
X
, matrice di rigidezza riferita al sistema di riferimento globale X,Y, vale:
1.72
ovvero, dalla 1.56:
1.73
ESEMPIO 1.3
Ricavare, nel sistema di riferimento globale , la matrice di rigidezza per
l'elemento asta comunque orientato nel piano.
Fig. 1.17 Elemento asta nel piano.
L'elemento asta pu resistere a soli sforzi assiali, ma nel caso piano esso pu
trasmettere, attraverso i nodi che si comportano da cerniere, forze aventi
componenti secondo gli assi globali e . Lo spostamento di ciascun nodo
dell'elemento asta nel piano quindi denito da una traslazione secondo
l'asse ed una secondo l'asse , ovvero, nel sistema di riferimento locale,
da una traslazione assiale e da una traslazione verticale .
Dal momento che l'elemento asta pu essere sollecitato da soli sforzi assiali,
diretti cio secondo l'asse locale , una traslazione verticale non produrr
nessuna tensione nell'elemento e quindi il corrispondente termine della
matrice di rigidezza dovr essere uguale a zero.
R [ ]
1
k [ ]
x
R [ ] s { }
X
f } {
X
k [ ]
X
s { }
X
f } {
X
k [ ]
X
R [ ]
1
k [ ]
x
R [ ]
k [ ]
X
R [ ]
T
k [ ]
x
R [ ]
XY ,
X Y
X Y
u v
x v
CARATTERIZZAZIONE DEGLI ELEMENTI
24
La notazione di rigidezza 1.8 per lasta diventa, sempre nel sistema di riferi-
mento locale :
1.74
Le matrici di rotazione sono:
1.75
e la matrice di rotazione :
1.76
Applicando la 1.73, la matrice di rigidezza dell'elemento asta nel sistema di
riferimento globale risulta:
1.77
dove , e l'angolo di cui ruotato il sistema di rife-
rimento locale rispetto a quello globale .
ESEMPIO 1.4
Ricavare, nel sistema di riferimento globale , la matrice di rigidezza per
l'elemento asta comunque orientato nello spazio.
Fig. 1.18 Elemento asta nello spazio.
x y ,
EA
l
-------
1 0 1 0
0 0 0 0
1 0 1 0
0 0 0 0
u
1
v
1
u
2
v
2
f
u1
f
v1
f
u2
f
v2
R
1
[ ] R
2
[ ] ,
R
1
[ ] R
2
[ ]
cos sin
sin cos
R [ ]
R [ ]
cos sin 0 0
sin cos 0 0
0 0 cos sin
0 0 sin cos
XY ,
k [ ]
X
EA
l
-------
c
2
cs c
2
cs
cs s
2
cs s
2
c
2
cs c
2
cs
cs s
2
cs s
2
c cos s sin
xy , XY ,
XY Z , ,
CARATTERIZZAZIONE DEGLI ELEMENTI
25
Il sistema di riferimento locale dell'elemento, denito dai nodi 1 e 2, tale
per cui l'asse coincide con l'asse della asta ed diretto da 1 verso 2; gli assi
e , perpendicolari all'asse , possono avere orientazione qualsiasi.
Come nei casi monodimensionale e piano l'elemento asta pu deformarsi solo
in senso assiale, cio lungo l'asse locale , mentre sar qui caratterizzato
dalle tre componenti di spostamento e di forza ai nodi 1 e 2. Per gli stessi
motivi visti nel caso dell'esempio 1.3, la notazione di rigidezza per lasta nel
sistema di riferimento locale :
1.78
Le matrici di rotazione sono espresse dalla 1.54, per cui la matrice
di rigidezza , nel sistema di riferimento risulta:
1.79
1.7 ELEMENTO TRAVE NEL PIANO
Per trave nel piano si intende un elemento comunque orientato nel piano e che
pu essere sollecitato da carichi comunque giacenti nel piano della struttura ed
aventi quindi componenti sia parallele sia ortogonali all'asse dell'elemento
(g. 1.19).
Nell'ipotesi di linearit geometrica tale elemento pu essere ottenuto come
sovrapposizione dell'elemento asta e dell'elemento trave inessa, caratterizzati
rispettivamente dalle equazioni 1.8 e 1.25, se nella trave inessa non si tiene
conto dell'effetto del taglio sulle deformazioni.
x
y z x
x
xyz , ,
EA
l
-------
1 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
1 0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
u
1
v
1
w
1
u
2
v
2
w
2
f
u1
f
v1
f
w1
f
u2
f
v2
f
w2
R
1
[ ] R
2
[ ] ,
k [ ]
X
XY Z , ,
k [ ]
x
EA
l
-------
l
1
2
l
1
m
1
l
1
n
1
l
1
2
l
1
m
1
l
1
n
1
l
1
m
1
m
1
2
m
1
n
1
l
1
m
1
m
1
2
m
1
n
1
l
1
n
1
m
1
n
1
n
1
2
l
1
n
1
m
1
n
1
n
1
2
l
1
2
l
1
m
1
l
1
n
1
l
1
2
l
1
m
1
l
1
n
1
l
1
m
1
m
1
2
m
1
n
1
l
1
m
1
m
1
2
m
1
n
1
l
1
n
1
m
1
n
1
n
1
2
l
1
n
1
m
1
n
1
n
1
2
CARATTERIZZAZIONE DEGLI ELEMENTI
26
Fig. 1.19 Elemento trave nel piano.
La notazione di rigidezza dell'elemento trave nel piano, riferita al sistema di rife-
rimento locale x,y quindi ottenuta combinando opportunamente le 1.8 e 1.25;
ordinando il vettore degli spostamenti {s} come:
1.80
e analogamente quello delle forze { f }:
1.81
la matrice di rigidezza [k]
x
riferita al sistema locale x,y:
1.82
La matrice di rigidezza [k]
X
riferita al sistema di riferimento globale X,Y si
ottiene come (vd. 1.73):
1.83
s { }
T
u
1
v
1
z1
u
2
v
2
z2
, , , , , { }
f } {
T
f
u1
f
v1
m
z1
f
u2
f
v2
m
z2
, , , , , { }
k [ ]
x
EA
l
------- 0 0
EA
l
------- 0 0
0
12EJ
z
l
3
---------------
6EJ
z
l
2
------------ 0
12EJ
z
l
3
---------------
6EJ
z
l
2
------------
0
6EJ
z
l
2
------------
4EJ
z
l
------------ 0
6EJ
z
l
2
------------
2EJ
z
l
------------
EA
l
-------
0 0
EA
l
------- 0 0
0
12EJ
z
l
3
---------------
6EJ
z
l
2
------------
0
12EJ
z
l
3
---------------
6EJ
z
l
2
------------
0
6EJ
z
l
2
------------
2EJ
z
l
------------ 0
6EJ
z
l
2
------------
4EJ
z
l
------------
k [ ]
X
R [ ]
T
k [ ]
x
R [ ]
CARATTERIZZAZIONE DEGLI ELEMENTI
27
dove la matrice di rotazione [R] quella ricavata nell'esempio 1.1 ed espressa
dalla 1.17.
Indicando con J l'angolo formato dall'asse della trave (asse x locale) con l'asse X
ed esprimendo le funzioni seno e coseno di J in funzione delle coordinate dei
nodi 1 e 2 della trave nel sistema di riferimento globale X,Y:
1.84
con l, lunghezza della trave, data da:
1.85
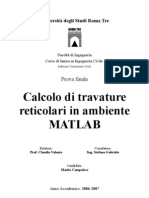
1.8 ELEMENTO TRAVE PER STRUTTURE A GRIGLIA
Questo elemento geometricamente analogo all'elemento trave nel piano
descritto al paragrafo 1.7; la sola differenza data dai carichi, che in tal caso sono
perpendicolari al piano dell'elemento (g. 1.20). Potr quindi essere sollecitato,
oltre che da taglio e da momento ettente, da un momento torcente m
x
anzich
da un carico assiale f
u
; corrispondentemente la sua cinematica denita, oltre
che da uno spostamento w diretto secondo lasse z e da una rotazione
y
intorno
all'asse y, da una rotazione
x
attorno all'asse x anzich da uno spostamento
assiale u.
Fig. 1.20 Elemento trave per strutture a griglia.
Analogamente a quanto fatto per la trave nel piano, la matrice di rigidezza di
questo elemento pu essere ottenuta come sovrapposizione dell'elemento trave
sollecitato a torsione e dell'elemento trave inessa, caratterizzati rispettivamente
dalle eq. 1.15 e 1.25, se nella trave inessa non si tiene conto dell'effetto del
taglio sulle deformazioni.
cos
X
2
X
1
l
-------------------
sin
Y
2
Y
1
l
-------------------
l X
2
X
1
( )
2
Y
2
Y
1
( )
2
CARATTERIZZAZIONE DEGLI ELEMENTI
28
k
[
]
x
E
A
l
-
-
-
-
-
--
c
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
s
2
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
E
A
l
-
-
-
-
-
--
c
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
s
2
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
E
A
l
-
-
-
-
-
--
s
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
E
A
l
-
-
-
-
-
--
s
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
4
E
J
z
l
-
-
-
-
-
-
-
-
-
--
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
2
E
J
z
l
-
-
-
-
-
-
-
-
-
--
E
A
l
-
-
-
-
-
--
c
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
s
2
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
E
A
l
-
-
-
-
-
--
c
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
s
2
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
E
A
l
-
-
-
-
-
--
s
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
E
A
l
-
-
-
-
-
--
c
s
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
s
E
A
l
-
-
-
-
-
--
s
2
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
2
E
J
z
l
-
-
-
-
-
-
-
-
-
--
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
c
4
E
J
z
l
-
-
-
-
-
-
-
-
-
--
c
o
s
s
i
n
E
q
.
1
.
8
6
M
a
t
r
i
c
e
d
i
r
i
g
i
d
e
z
z
a
[
k
]
X
p
e
r
l
e
l
e
m
e
n
t
o
t
r
a
v
e
n
e
l
p
i
a
n
o
.
CARATTERIZZAZIONE DEGLI ELEMENTI
29
Ordinando il vettore degli spostamenti {s} e quello delle forze { f }come:
1.87
1.88
la matrice di rigidezza [k]
x
riferita al sistema locale x,y:
1.89
La matrice di rigidezza [k]
X
nel sistema di riferimento globale X,Y si ottiene
(vd. 1.73) come:
1.90
e la matrice di rotazione [R] quella espressa dalla 1.64, avendo ordinato il vet-
tore degli spostamenti come in 1.87.
s { }
T
x1
y1
w
1
x2
y2
w
2
, , , , , { }
f } {
T
m
x1
m
y1
f
w1
m
x2
m
y2
f
w2
, , , , , { }
k [ ]
x
GJ
x
l
-------- 0 0
GJ
x
l
-------- 0 0
0
4EJ
y
l
-----------
6EJ
y
l
2
----------- 0
2EJ
y
l
-----------
6EJ
y
l
2
-----------
0
6EJ
y
l
2
-----------
12EJ
y
l
3
-------------- 0
6EJ
y
l
2
-----------
12EJ
y
l
--------------
GJ
x
l
-------- 0 0
GJ
x
l
-------- 0 0
0
2EJ
y
l
-----------
6EJ
y
l
2
----------- 0
4EJ
y
l
-----------
6EJ
y
l
2
-----------
0
6EJ
y
l
2
-----------
12EJ
y
l
-------------- 0
6EJ
y
l
2
-----------
12EJ
y
l
3
--------------
k [ ]
X
R [ ]
T
k [ ]
x
R [ ]
CARATTERIZZAZIONE DEGLI ELEMENTI
30
k
[
]
x
G
J
x
l
-
-
-
-
-
-
-
-
c
2
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
s
2
G
J
x
l
-
-
-
-
-
-
-
-
c
s
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
G
J
x
l
-
-
-
-
-
-
-
-
c
2
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
s
2
G
J
x
l
-
-
-
-
-
-
-
-
c
s
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
G
J
x
l
-
-
-
-
-
-
-
-
c
s
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
G
J
x
l
-
-
-
-
-
-
-
-
s
2
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
G
J
x
l
-
-
-
-
-
-
-
-
c
s
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
G
J
x
l
-
-
-
-
-
-
-
-
s
2
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
G
J
x
l
-
-
-
-
-
-
-
-
c
2
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
s
2
G
J
x
l
-
-
-
-
-
-
-
-
c
s
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
G
J
x
l
-
-
-
-
-
-
-
-
c
2
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
s
2
G
J
x
l
-
-
-
-
-
-
-
-
c
s
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
G
J
x
l
-
-
-
-
-
-
-
-
c
s
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
G
J
x
l
-
-
-
-
-
-
-
-
s
2
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
G
J
x
l
-
-
-
-
-
-
-
-
c
s
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
s
G
J
x
l
-
-
-
-
-
-
-
-
s
2
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
c
2
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
s
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
c
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
c
o
s
s
i
n
E
q
.
1
.
9
1
M
a
t
r
i
c
e
d
i
r
i
g
i
d
e
z
z
a
[
k
]
X
p
e
r
l
'
e
l
e
m
e
n
t
o
t
r
a
v
e
i
n
s
t
r
u
t
t
u
r
e
a
g
r
i
g
l
i
a
.
CARATTERIZZAZIONE DEGLI ELEMENTI
31
1.9 ELEMENTO TRAVE NELLO SPAZIO
Per trave nello spazio si intende un elemento comunque orientato nello spazio e
che pu essere sollecitato da carichi generalmente descrivibili in termini di forze
assiali, forze perpendicolari al suo asse, momenti ettenti agenti secondo i due
assi principali d'inerzia della sua sezione e momento torcente agente lungo il suo
asse (g. 1.21).
Il sistema di riferimento locale dell'elemento, denito dai nodi 1 e 2, tale per
cui l'asse x coincide con l'asse della trave ed diretto da 1 verso 2; gli assi ye z,
perpendicolari all'asse x, coincidono con gli assi principali d'inerzia della sezione
della trave.
In tal modo le azioni di taglio e di momento ettente nei due piani xye xz pos-
sono essere considerate indipendenti l'una dall'altra. Si ha cos una notevole
semplicazione nella formulazione della matrice di rigidezza dell'elemento che
pu essere ottenuta, nell'ipotesi di linearit geometrica, come sovrapposizione
delle matrici dell'elemento trave sollecitato assialmente (asta), dell'elemento
trave sollecitato a torsione (barra di torsione) e dell'elemento trave inessa.
Fig. 1.21 Trave nello spazio.
Se per quest'ultima non si tiene conto dell'effetto del taglio sulle deformazioni,
la notazione di rigidezza 1.1 dell'elemento trave nello spazio, nel sistema di riferi-
mento locale x,y,z quindi ottenuta come opportuna combinazione delle 1.8,
1.15 e 1.25.
CARATTERIZZAZIONE DEGLI ELEMENTI
32
1.1
Eq. 1.92 Matrice di rigidezza per l'elemento trave nello spazio.
k
[
]
x
E
A
l
-
-
-
-
-
--
0
0
0
0
0
E
A
l
-
-
-
-
-
--
0
0
0
0
0
0
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
0
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
0
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
0
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
0
G
J
x
l
-
-
-
-
-
-
-
-
0
0
0
0
0
G
J
x
l
-
-
-
-
-
-
-
-
0
0
0
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
0
0
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
0
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
4
E
J
z
l
-
-
-
-
-
-
-
-
-
--
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
2
E
J
z
l
-
-
-
-
-
-
-
-
-
--
E
A
l
-
-
-
-
-
--
0
0
0
0
0
E
A
l
-
-
-
-
-
--
0
0
0
0
0
0
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
0
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
1
2
E
J
z
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
0
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
0
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
1
2
E
J
y
l
3
-
-
-
-
-
-
-
-
-
-
-
-
--
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
0
G
J
x
l
-
-
-
-
-
-
-
-
0
0
0
0
0
G
J
x
l
-
-
-
-
-
-
-
-
0
0
0
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
2
E
J
y
l
-
-
-
-
-
-
-
-
-
--
0
0
0
6
E
J
y
l
2
-
-
-
-
-
-
-
-
-
--
0
4
E
J
y
l
-
-
-
-
-
-
-
-
-
--
0
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
2
E
J
z
l
-
-
-
-
-
-
-
-
-
--
0
6
E
J
z
l
2
-
-
-
-
-
-
-
-
-
--
0
0
0
4
E
J
z
l
-
-
-
-
-
-
-
-
-
--
CARATTERIZZAZIONE DEGLI ELEMENTI
33
1.10 CARICHI NODALI EQUIVALENTI
Verranno qui descritte le procedure per trattare sistemi di carico diversi da quelli
costituiti da sole forze applicate ai nodi degli elementi, e che quindi non possono
essere inseriti direttamente nelle equazioni che descrivono il comportamento
dell'elemento; in tali sistemi di carico rientrano, per esempio i carichi distribuiti,
gli effetti termici, ecc.
Sistemi di carico non agenti direttamente ai nodi degli elementi verranno sosti-
tuiti da sistemi di carico equivalenti ma agenti nei nodi; il termine equivalenti
signica che i due sistemi di carico producono gli stessi effetti nei nodi dell'ele-
mento, ma non necessariamente al suo interno.
In termini generali la notazione di rigidezza per l'elemento 1.39 viene ora
riscritta come:
1.93
dove { f
e
} rappresenta il vettore dei carichi nodali equivalenti ad un sistema di
carico non applicato direttamente ai nodi.
1.10.1 Elemento asta: carico distribuito
Su un elemento asta agisca un carico uniformemente distribuito q
u
, in direzione
parallela all'asse dell'elemento e positivo se concorde al verso dell'asse locale x
(g. 1.22).
Fig. 1.22 Carico distribuito assialmente.
L'equazione di equilibrio :
1.94
e l'equazione di deformazione:
1.95
In forma di scrittura di rigidezza:
k [ ] s { } f } { f
e
} {
f
u1
f
u2
q
u
l
0
u
2
u
1
l
EA
------- f
u2
l
2
2EA
---------- q
u
CARATTERIZZAZIONE DEGLI ELEMENTI
34
1.96
ed il vettore dei carichi nodali equivalenti ad un carico distribuito assialmente :
1.97
1.10.2 Elemento asta: effetto termico
Se l'elemento barra soggetto, in ogni sua sezione, ad un aumento di tempera-
tura di valor medio T
m
, misurato a partire da una temperatura di riferimento; si
avr un allungamento della barra pari a:
1.98
dove il coefciente di dilatazione termica lineare. In forma di rigidezza si
ottiene:
1.99
e il vettore dei carichi nodali equivalente ad un aumento medio di temperatura :
1.100
1.10.3 Elemento asta: montaggio con interferenza o gioco
Si supponga ora di sapere che un elemento, montato fra due punti di date coor-
dinate, riesce ad essere montato fra tali punti solo allungandolo o accorciandolo
sotto l'azione di forze assiali, inducendo uno stato di pretensione assiale. Per cal-
colare in:
1.101
il vettore { f
e
} dei carichi nodali equivalenti ad uno stato di pretensione, un modo
semplice di procedere quello di considerare che in assenza di forze { f } appli-
cate dall'esterno agli estremi, gli spostamenti saranno tali da riportare la lun-
ghezza dell'elemento al valore che essa ha quando l'elemento stesso scarico.
Pertanto in:
EA
l
-------
1 1
1 1
u
1
u
2
f
u1
f
u2
q
u
l
2
-------
1
1
f
e
} {
T
q
u
l
2
-------
q
u
l
2
-------
u
2
u
1
lT
m
EA
l
-------
1 1
1 1
u
1
u
2
f
u1
f
u2
EAT
m
1
1
f
e
} {
T
EAT
m
EAT
m
{ }
k [ ] s { } f } { f
e
} {
CARATTERIZZAZIONE DEGLI ELEMENTI
35
1.102
quando f
u1
= f
u2
= 0 si deve avere:
1.103
Sostituendo in 1.102:
1.104
e risolvendo per f
e1
e f
e2
si ottiene:
1.105
funzione, come era da aspettarsi, del solo allungamento totale l = l
1
l
2
,
con l denito positivo quando corrisponde ad un montaggio con allunga-
mento.
1.10.4 Elemento asta: carico concentrato
Anche un carico concentrato, applicato fra gli estremi dell'elemento pu essere
ridotto ad un vettore di carichi nodali equivalenti.
Fig. 1.23 Carico concentrato intermedio.
Con riferimento alla gura 1.23 se la forza assiale f
u
applicata all'ascissa , le
equazioni risolutive 1.1 e 1.3 diventano:
1.106
EA
l
-------
1 1
1 1
u
1
u
2
f
u1
f
u2
f
e1
f
e2
u
1
l
1
u
2
l
2
EA
l
-------
1 1
1 1
l
1
l
2
0
0
f
e1
f
e2
f
e1
f
e2
EA
l
l
-----
1
1
f
u1
f
u2
f
u
0
u
2
u
1
l
EA
------- f
u2
x
EA
------- f
u
CARATTERIZZAZIONE DEGLI ELEMENTI
36
ed il vettore dei carichi nodali equivalente risulta pertanto essere:
1.107
1.10.5 Elemento trave inessa: carico distribuito
Si consideri un elemento trave rettilineo sul quale agisca un carico distribuito
uniforme q
v
ed agente in senso normale all'asse della trave (g. 1.24).
Fig. 1.24 Carico uniformemente distribuito.
Le equazioni di equilibrio e di congruenza 1.21 diventano ora:
1.108
Elaborando le 1.108 come nel caso dell'elemento asta si ottiene l'espressione del
carico nodale equivalente ad un carico uniformemente distribuito:
1.109
f
e
} {
T
f
u
l x
l
---------------
x
l
-----
0 f
v1
f
v2
q
v
l
0 f
v1
l
q
v
l
2
2
---------
m
z1
m
z2
z2
z1
l
EJ
z
-------- m
z1
l
2
2EJ
z
----------- f
v1
q
v
l
3
6EJ
z
-----------
v
2
v
1
z1
l
l
2
2EJ
z
----------- m
z1
l
3
6EJ
z
----------- f
v1
q
v
l
4
24EJ
z
--------------
f
e
} {
T
q
v
l
2
---
l
2
12
------
l
2
---
l
2
12
------
CARATTERIZZAZIONE DEGLI ELEMENTI
37
1.10.6 Elemento trave inessa: gradiente termico
Si consideri ora una trave sottoposta a temperature differenti su intradosso ed
estradosso. In direzione normale all'asse della trave ci sar pertanto una varia-
zione di temperatura, con legge di variazione considerata lineare. Il valor medio
di tale variazione di temperatura, rispetto ad un valore di riferimento, respon-
sabile dell'allungamento assiale della trave e di ci si tenuto conto in 1.98; la
variazione rispetto al valor medio invece responsabile dell'inessione ed que-
sta variazione che verr qui analizzata.
Fig. 1.25 Trave inflessa sottoposta a gradiente termico.
Indicando con T la differenza di temperatura tra valore massimo e valore
medio, positivo se la temperatura cresce nel verso delle y crescenti (g. 1.25), con
h l'altezza della trave e con il coefciente di dilatazione termica lineare, a
causa dell'aumento differenziale di temperatura si ha:
1.110
e pertanto le equazioni di deformazione 1.19, 1.20 diventano:
1.111
queste, insieme alle equazioni di equilibrio 1.16 e 1.17 portano alla relazione
matriciale di rigidezza 1.25 ed al vettore dei carichi nodali equivalente ad una
distribuzione di temperatura:
1.112
z2
z1
2
T
x
h
--
z2
z1
l
EJ
z
------- m
z1
l
2
2EJ
z
----------- f
v1
2
T
l
h
--
v
2
v
1
z1
l
l
2
2EJ
z
----------- m
z1
l
3
6EJ
z
----------- f
v1
T
l
2
h
-----
f
e
} {
T
0
2
TEJ
z
h
-------------------------- 0
2
TEJ
z
h
--------------------------
CARATTERIZZAZIONE DEGLI ELEMENTI
38
1.10.7 Elemento trave inessa: carichi concentrati
Il vettore dei carichi nodali equivalente a carichi concentrati f
v
e m
z
ad una
ascissa dal nodo 1 ricavato in modo analogo a quanto fatto per l'elemento
asta. Elaborando le equazioni di equilibrio e di congruenza opportunamente
scritte, si ottiene:
1.113
1.10.8 Trave nel piano; carichi nodali equivalenti
I carichi nodali equivalenti possono essere ottenuti come opportuna sovrapposi-
zione dei carichi nodali equivalenti per l'elemento barra e per l'elemento trave
inessa, analogamente a quanto fatto per la matrice di rigidezza.
Ad esempio il carico nodale equivalente ad un carico uniformemente distribuito
assiale q
u
e ad un carico uniformemente distribuito verticale q
v
(g. 1.26).
Fig. 1.26 Carico distribuito.
dato, nel sistema di riferimento locale x, yda:
1.114
x
f
e
} {
l
3
2x
3
3lx
2
l
3
---------------------------------------------f
v
6x
l x
( )
l
3
-----------------------------m
z
3
l
2
x
2lx
2
l
2
-----------------------------------------------f
v
l
2
3x
2
4lx
l
2
------------------------------------------m
z
2x
3
3lx
l
3
--------------------------------f
v
6x
l x
( )
l
3
-----------------------------m
z
3
lx
l
2
-------------------------f
v
3x
2
2lx
l
2
------------------------------m
z
f
e
} {
T
q
u
l
2
--- q
v
l
2
--- q
v
l
2
12
------ q
u
l
2
--- q
v
l
2
--- q
v
l
2
12
------
CARATTERIZZAZIONE DEGLI ELEMENTI
39
mentre quello dovuto ad una distribuzione di temperatura con valor medio T
m
e
gradiente T (g. 1.27) dato da:
1.115
Fig. 1.27 Effetto termico.
I vettori dei carichi nodali equivalenti nel sistema di riferimento globale X,Y pos-
sono essere ricavati ricordando le 1.68 e 1.56:
1.116
In generale se:
1.117
si ha:
1.118
dove J rappresenta l'angolo formato tra l'asse x locale e l'asse X globale.
f
e
} {
T
EAT
m
0
2
EJ
z
T
h
--------------------------
EAT
m
0
2
EJ
z
T
h
--------------------------
f
e
} {
X
R [ ]
T
f
e
{ }
x
f
e
} {
x
T
f
e1
f
e2
f
e3
f
e4
f
e5
f
e6
{ }
f
e
{ }
X
f
e1
cos f
e2
sin
f
e1
cos f
e2
sin
f
e3
f
e4
cos f
e5
sin
f
e4
cos f
e5
sin
f
e6
CARATTERIZZAZIONE DEGLI ELEMENTI
40
ELEMENTO ASTA - TABELLA SINOTTICA
con:
E modulo elastico
A area (costante) della sezione retta
l lunghezza dell'elemento
l variazione di lunghezza iniziale; positivo se gioco, negativo se interfe-
renza
T
m
variazione di temperatura, uguale in ogni sezione
* coefciente di dilatazione termica lineare
q
u
carico assiale per unit di lunghezza, costante
f
u
carico assiale concentrato all'ascissa
EA
l
-------
1 1
1 1
u
1
u
2
f
u1
f
u2
q
ul
2
-------
1
1
+
+
EAT
m
1
1
EA
l
l
-----
1
1
f
u
l
----
l x
CARATTERIZZAZIONE DEGLI ELEMENTI
41
ELEMENTO TRAVE INFLESSA - TABELLA SINOTTICA
con:
E modulo elastico
h altezza della sezione
J
z
momento d'inerzia trasversale
l lunghezza dell'elemento
2T variazione di temperatura estradosso-intradosso
* coefciente di dilatazione termica lineare
q
v
carico assiale per unit di lunghezza, costante
f
v
carico assiale concentrato all'ascissa
m
z
momento concentrato all'ascissa
EJ
z
12
l
3
------
6
l
2
----
12
l
3
------
6
l
2
----
6
l
2
----
4
l
---
6
l
2
----
2
l
---
12
l
3
------
6
l
2
----
12
l
3
------
6
l
2
----
6
l
2
----
2
l
---
6
l
2
----
4
l
---
v
1
z1
v
2
z2
f
v1
m
z1
f
v2
m
z2
q
v
l
2
---
l
2
12
------
l
2
---
l
2
12
------
+
+
TEJ
z
h
-----------------------
0
1
0
1
l
3
2x
3
3lx
2
l
3
---------------------------------------------f
v
6x
l x
( )
l
3
-----------------------------m
z
3
l
2
x
2lx
2
l
2
------------------------------------------------f
v
l
2
3x
2
4lx
l
2
-------------------------------------------m
z
2x
3
3lx
l
3
--------------------------------f
v
6x
l x
( )
l
3
-----------------------------m
z
3
lx
l
2
--------------------------f
v
3x
2
2lx
l
2
------------------------------m
z
43
2. CARATTERIZZAZIONE DELLA STRUTTURA
2.1 V
ARIABILI
ED
EQUAZIONI
STRUTTURA
Nel capitolo
1
sono stati ricavati la matrice di rigidezza ed i vettori dei carichi
nodali equivalenti per gli elementi barra e trave a partire dalle equazioni di equi-
librio e congruenza:
2.1
Si descriver ora come questi elementi vengono
assemblati
tra di loro per costru-
ire una struttura. Quanto verr illustrato in questo capitolo ha validit del tutto
generale e non legato al particolare elemento trave studiato nel capitolo
1.
A titolo d'esempio si osservi la struttura di gura
2.1
, che si pu considerare
composta da tre elementi barra, compresi rispettivamente tra i punti 1 e 2, 1 e 3,
2 e 3; i punti 1, 2, 3 sono detti
nodi
della struttura.
Fig. 2.1
Struttura reticolare.
k [ ] s { } f } { f
e
{ } + =
CARATTERIZZAZIONE
DELLA
STRUTTURA
44
Le propriet elastiche di ciascun elemento sono denite, a prescindere dalla
struttura, dalla
2.1
in cui i vettori degli spostamenti generalizzati {
s
} e delle forze
generalizzate {
f
} relativi al generico elemento sono dati da:
2.2
Si quindi in grado di costituire idealmente un
magazzino
degli elementi che
compongono la struttura, costituito da:
1. l'elenco delle variabili-elemento {
s
}, {
f
} che servono a denire le
propriet di ogni singolo elemento presente nella struttura
2. l'insieme delle equazioni che legano tra di loro le variabili-elemento
per ciascuno degli elementi
Per descrivere matematicamente la struttura occorre ora denire:
1. l'elenco delle variabili-struttura
2. le equazioni che legano fra loro le variabili-struttura
Nel caso della gura
2.1
le variabili struttura sono:
2.3
Analogamente a quanto fatto per il singolo elemento, anche per la struttura ven-
gono quindi individuati due insiemi distinti di variabili:
N
variabili cinematiche, cio gli spostamenti generalizzati necessari a
denire il campo di spostamento della struttura
N
variabili statiche, cio forze generalizzate che dall'esterno sono
applicate nei punti nodali della struttura
Il numero
N
di variabili struttura dato dalla sommatoria, estesa a tutti i nodi
della struttura, del numero di gradi di libert cinematici di ciascun nodo. Nel
caso della struttura di gura
2.1
(3 nodi e 2 gradi di libert per nodo) il numero
di gradi di libert della struttura pari a 6.
Per poter caratterizzare matematicamente la struttura, si deniscono, per ciascun
nodo, le seguenti relazioni tra le variabili struttura e le variabili elemento:
l'uguaglianza tra le variabili cinematiche struttura e quelle degli ele-
menti che concorrono nel nodo
l'equilibrio tra le variabili statiche struttura e quelle degli elementi che
concorrono nel nodo
s { }
T
u
1
v
1
u
2
v
2
{ } =
f } {
T
f
u1
f
v1
f
u2
f
v2
{ } =
S { }
T
U
1
V
1
U
2
V
2
U
3
V
3
{ } =
F { }
T
F
u1
F
v1
F
u2
F
v2
F
u3
F
v3
{ } =
CARATTERIZZAZIONE
DELLA
STRUTTURA
45
ESEMPIO
2.1
Descrivere le relazioni tra variabili elemento e variabili struttura per il nodo 2
della struttura piana di gura
2.2
.
Nel nodo 2, ove concorrono l'elemento 2 e l'elemento 3, sono denite le
variabili cinematiche struttura . Per ciascuno dei due elementi sono
denite, negli estremi che conuiscono nel nodo 2 le variabili elemento
per l'elemento 2, per l'elemento 3. chiaro che l'insieme
delle variabili, elemento e struttura, riferito al sistema di riferimento glo-
bale .
Fig. 2.2
Struttura ed elementi.
Per la congruenza degli spostamenti dovranno valere le seguenti uguaglianze:
2.4
Queste equazioni rappresentano matematicamente il fatto che i due elementi
2, 3 sono uniti nel nodo comune 2. In generale tutte le variabili cinematiche
elemento vengono espresse in funzione delle variabili cinematiche struttura,
mediante un numero di equazioni pari al numero di variabili elemento.
Per quanto riguarda le variabili statiche, nel nodo 2 sono deniti, per la strut-
tura, i carichi e per i due elementi, negli estremi che conuiscono
nel nodo 2, le variabili, sempre riferite al sistema di riferimento globale
per l'elemento 2,
per l'elemento 3. Per l'equilibrio del
nodo 2 si deve avere:
2.5
Per quanto riguarda i carichi si hanno cos tante equazioni quante le variabili
struttura.
U
2
V
2
,
u
2
v
2
, ( )
2
u
2
v
2
, ( )
3
XY ,
u
2
( )
2
U
2
= v
2
( )
2
V
2
=
u
2
( )
3
U
2
= v
2
( )
3
V
2
=
F
u2
F
v2
,
XY ,
f
u2
f
v2
, ( )
2
f
u2
f
v2
, ( )
2
f
u2
( )
2
f
u2
( )
3
+ F
u2
=
f
v2
( )
2
f
v2
( )
3
+ F
v2
=
CARATTERIZZAZIONE
DELLA
STRUTTURA
46
In generale quindi se alla struttura sono associate
N
variabili cinematiche ed
N
statiche e se la struttura composta da elementi che complessivamente compor-
tano n variabili cinematiche e
n
statiche, le equazioni che esprimono il collega-
mento degli elementi in una struttura saranno:
N
equazioni di equilibrio
n
equazioni di congruenza
2.2 A
SSEMBLAGGIO
DELLE EQUAZIONI STRUTTURA
Nell'esempio precedente si visto che per descrivere matematicamente come i
vari elementi sono collegati per formare la struttura si scrivono N equazioni di
equilibrio e n equazioni di congruenza. Tenendo conto che si hanno a disposi-
zione n equazioni-elemento 2.1, si possono in totale ottenere N + 2n equazioni
risolutive del problema strutturale. In tali equazioni compaiono sia le 2N varia-
bili struttura sia le 2n variabili elemento.
Si potrebbe pensare, a questo punto, di utilizzare le equazioni cos come sono
state derivate e risolvere il problema in termini sia di variabili elemento sia di
variabili struttura; per pi efciente, dal punto di vista di organizzazione e
sistematicit del calcolo, lavorare solo a livello di struttura e con sole variabili
struttura.
Le equazioni che esprimono le variabili elemento in termini di variabili struttura
verranno quindi utilizzate per ottenere, a partire dalla scrittura di rigidezza dei
singoli elementi, la notazione di rigidezza per la struttura:
2.6
Indicato con E il numero degli elementi costituenti la struttura, le equazioni che
caratterizzano il comportamento dell'elemento h-esimo sono denite da:
2.7
e legano forze e spostamenti generalizzati ai nodi dell'elemento.
Si immagini ora di costruire sicamentela struttura a partire dagli elementi a
disposizionein un magazzino. I nodi della struttura avranno una loro posizione
ben determinata nello spazio e tra questi nodi dovranno essere inseriti gli ele-
menti per formare la struttura.
Dovr quindi esserci una corrispondenza tra i nodi dei vari elementi ed i nodi
della struttura: se il nodo i dell'elemento h-esimo dovr coincidere col nodo k
della struttura allora gli spostamenti-elemento del nodo i dovranno coincidere
con gli spostamenti-struttura del nodo k, mentre le forze-elemento del nodo i
contribuiranno all'equilibrio del nodo k.
K [ ] S { } F { } F
e
{ } + =
k [ ]
h
s { }
h
f } {
h
f
e
{ }
h
+ = h 1... E =
CARATTERIZZAZIONE DELLA STRUTTURA
47
ESEMPIO 2.2
Ricavare la matrice di rigidezza per la struttura rappresentata in gura 2.1.
La struttura composta da 3 elementi barra la cui matrice di rigidezza data,
nel sistema di riferimento globale dalla 1.77. La corrispondenza tra nodi
elementi e nodi struttura data dalla tabella 2.1; le equazioni di congruenza
tra gli spostamenti elemento e spostamenti struttura e le equazioni di equili-
brio ai nodi sono riassunte rispettivamente nelle tabelle 2.2 e 2.3.
Tab. 2.1 Connessione degli elementi per la struttura di gura 2.1
Tab. 2.2 Equazioni di congruenza per gli spostamenti elemento e spostamenti
struttura
Tab. 2.3 Equazioni di equilibrio ai nodi della struttura
ELEMENTO 1 2 3
NODO 1 1 1 3
NODO 2 3 2 2
ELEMENTO 1
ELEMENTO 2
ELEMENTO 3
NODO 1
NODO 2
NODO 3
XY ,
u
1
( )
1
U
1
= v
1
( )
1
V
1
=
u
2
( )
1
U
3
= v
2
( )
1
V
3
=
u
1
( )
2
U
1
= v
1
( )
2
V
1
=
u
2
( )
2
U
2
= v
2
( )
2
V
2
=
u
1
( )
3
U
3
= v
1
( )
3
V
3
=
u
2
( )
3
U
2
= v
2
( )
3
V
2
=
f
u1
( )
1
f
u1
( )
2
+ F
u1
=
f
v1
( )
1
f
v1
( )
2
+ F
v1
=
f
u2
( )
2
f
u2
( )
3
+ F
u2
=
f
v2
( )
2
f
v2
( )
3
+ F
v2
=
f
u2
( )
1
f
u1
( )
3
+ F
u3
=
f
v2
( )
1
f
v1
( )
3
+ F
v3
=
CARATTERIZZAZIONE DELLA STRUTTURA
48
Sostituendo le equazioni di congruenza (tab. 2.2) nelle espressioni di rigi-
dezza dei singoli elementi si ottiene, per l'elemento 1:
2.8
per l'elemento 2:
2.9
per l'elemento 3:
2.10
Sostituendo nelle equazioni di equilibrio (tab. 2.3) le espressioni delle forze
elemento date dalle 2.3, 2.4 e 2.5 si ottiene:
2.11
2.12
a
11
a
12
a
13
a
14
a
21
a
22
a
23
a
24
a
31
a
32
a
33
a
34
a
41
a
42
a
43
a
44
U
1
V
1
U
3
V
3
f
u1
f
v1
f
u2
f
v2
=
b
11
b
12
b
13
b
14
b
21
b
22
b
23
b
24
b
31
b
32
b
33
b
34
b
41
b
42
b
43
b
44
U
1
V
1
U
2
V
2
f
u1
f
v1
f
u2
f
v2
=
c
11
c
12
c
13
c
14
c
21
c
22
c
23
c
24
c
31
c
32
c
33
c
34
c
41
c
42
c
43
c
44
U
3
V
3
U
2
V
2
f
u1
f
v1
f
u2
f
v2
=
F
u1
a
11
U
1
a
12
V
1
a
13
U
3
a
14
V
3
b
11
U
1
b
12
V
1
b
13
U
2
b
14
V
2
+ + + + + + + =
F
v1
a
21
U
1
a
22
V
1
a
23
U
3
a
24
V
3
b
21
U
1
b
22
V
1
b
23
U
2
b
24
V
2
+ + + + + + + =
F
u2
b
31
U
1
b
32
V
1
b
33
U
2
b
34
V
2
c
31
U
3
c
32
V
3
c
33
U
2
c
34
V
2
+ + + + + + + =
F
v2
b
41
U
1
b
42
V
1
b
43
U
2
b
44
V
2
c
41
U
3
c
42
V
3
c
43
U
2
c
44
V
2
+ + + + + + + =
F
u3
a
31
U
1
a
32
V
1
a
33
U
3
a
34
V
3
c
11
U
3
c
12
V
3
c
13
U
2
c
14
V
2
+ + + + + + + =
F
v3
a
41
U
1
a
42
V
1
a
43
U
3
a
44
V
3
c
21
U
3
c
22
V
3
c
23
U
2
c
24
V
2
+ + + + + + + =
a
11
b
11
+ ( ) a
12
b
12
+ ( ) b
13
b
14
a
13
a
14
a
21
b
21
+ ( ) a
22
b
22
+ ( ) b
23
b
24
a
23
a
24
b
31
b
32
b
33
c
33
+ ( ) b
34
c
34
+ ( ) c
31
c
32
b
41
b
42
b
43
c
43
+ ( ) b
44
c
44
+ ( ) c
41
c
42
a
31
a
32
c
13
c
14
a
33
c
11
+ ( ) a
34
c
12
+ ( )
a
41
a
42
c
23
c
24
a
43
c
21
+ ( ) a
44
c
22
+ ( )
U
1
V
1
U
2
V
2
U
3
V
3
F
u1
F
v1
F
u2
F
v2
F
u3
F
v3
=
CARATTERIZZAZIONE DELLA STRUTTURA
49
Da notare che la matrice di rigidezza globale ancora simmetrica e denita
pos i t i va. As s umendo i s eguent i val or i ;
; , , dalla 1.77 si ottiene:
per l'elemento 1 (J = 90; c = 0; s = 1):
2.13
per l'elemento 2 (J = 0; c = 1; s = 0):
2.14
per l'elemento 3 (J = 45; c = 0.707; s = 0.707):
2.15
e la matrice di rigidezza della struttura :
2.16
Nel precedente esempio si illustrato come vengono ricavate le equazioni di
equilibrio della struttura conoscendo:
la corrispondenza tra nodi elemento e nodi struttura
le matrici di rigidezza degli elementi
Da notare che la posizione nella matrice di rigidezza della struttura del coef-
ciente k
ij
della matrice di rigidezza dell'elemento h-esimo dipende esclusivamente
dalla corrispondenza tra i nodi dell'elemento h-esimo ed i nodi della struttura.
Si prenda ad esempio il coefciente c
42
dell'elemento 3 della struttura di
gura 2.1. Esso moltiplica lo spostamento v
1
del nodo 1 elemento che coincide
con lo spostamento V
3
nodo 3 struttura; quindi il coefciente c
42
dovr occupare
una casella nella colonna 6 della matrice di rigidezza struttura, corrispondente
allo spostamento V
3
.
E
1
E
2
E
3
1000 = = =
A
1
A
2
A
3
1 = = = l
1
l
2
1 = = l
3
1.414 =
k [ ]
1
0 0 0 0
0 1000 0 1000
0 0 0 0
0 1000 0 1000
=
k [ ]
2
1000 0 1000 0
0 0 0 0
1000 0 1000 0
0 0 0 0
=
k [ ]
3
354 354 354 354
354 354 354 354
354 354 354 354
354 354 354 354
=
k [ ]
1000 0 1000 0 0 0
0 1000 0 0 0 1000
1000 0 1354 354 354 354
0 0 354 354 354 354
0 0 354 354 354 354
0 1000 354 354 354 1354
=
CARATTERIZZAZIONE DELLA STRUTTURA
50
Inoltre il coefciente c
42
compare nell'equazione di equilibrio della forza f
v2
del
nodo 2 elemento; questa a sua volta contribuisce all'equilibrio della forza F
v2
del
nodo 2 struttura. Quindi il coefciente c
42
dovr occupare, sommandosi, una
casella nella riga 4 della matrice di rigidezza della struttura, corrispondente
all'equazione di equilibrio per la forza F
v2
. Sono cos determinate le coordinate
della posizione dell'elemento c
42
nella matrice di rigidezza della struttura: riga 4,
colonna 6.
Questo procedimento di assemblaggio pu anche essere visto sotto un altro
aspetto in modo da ottenere un algoritmo direttamente utilizzabile nei pro-
grammi di calcolo. A questo scopo risulta pi conveniente identicare i gradi di
libert, siano essi associati all'elemento o alla struttura, con un numero invece
che con una lettera come si fatto sino ad ora.
Si esamini ancora la struttura dell'esempio 2.1. I gradi di libert dell'elemento h-
esimo associati al nodo 1 saranno ora indicati con 1 e 2 invece che u
1
e v
1
, e
quelli associati al nodo 2 con 3 e 4 invece che u
2
e v
2
. Le equazioni elemento
saranno a loro volta indicate con 1, 2, 3, 4 (g. 2.3).
I gradi di libert struttura saranno invece: 1 e 2 per il nodo 1 invece che U
1
e V
1
,
3 e 4 per il nodo 2 invece che U
2
e V
2
, 5 e 6 per il nodo 3 invece che U
3
e V
3
.
Allo stesso modo le equazioni struttura saranno numerate come 1, 2, 3, 4, 5, 6.
Fig. 2.3 Numerazione delle equazioni struttura ed elemento.
Questo modo di identicare i gradi di libert fornisce inoltre direttamente le
dimensioni dei sistemi di equazioni associati all'elemento o alla struttura; infatti
per l'elemento si hanno 4 gradi di libert e la matrice di rigidezza avr dimen-
sioni 4x4, per la struttura si hanno 6 gradi di libert e la matrice di rigidezza
della struttura avr dimensioni 6x6.
CARATTERIZZAZIONE DELLA STRUTTURA
51
Per assemblare la matrice di rigidezza struttura si far allora riferimento diretta-
mente alla corrispondenza (mappa) tra i gradi di libert elemento e i gradi di
libert struttura, e tra le equazioni elemento e le equazioni struttura.
La mappa individua direttamente la corrispondenza tra la posizione del generico
coefciente della matrice di rigidezza elemento e la sua posizione nella matrice di
rigidezza struttura.
Nel caso della struttura di gura 2.3 la mappa tra gradi di libert elemento e
gradi di libert struttura e tra equazioni elemento e equazioni struttura data
dalla tabella 2.4.
Tab. 2.4 Mappa per la corrispondenza dei gradi di libert elemento e dei gradi di
libert struttura
Per l'elemento h-esimo la relazione di rigidezza 2.7 si pu scrivere come segue:
2.17
avendo indicato con n
h
il numero di gradi di libert dell'elemento h-esimo.
Ciascun grado di libert cinematico ( j = 1, n
h
) dell'elemento corrisponde biuni-
vocamente, per un dato elemento h, con un grado di libert cinematico della
struttura, indicato con G
hj
e leggibile nella colonna j-esima della mappa dell'ele-
mento (tab. 2.5); un medesimo valore di G
hj
pu comparire una volta sola nella
mappa dell'elemento perch un grado di libert elemento corrisponde ad uno ed
uno solo grado di libert struttura.
ELEMENTO 1 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 1 2 5 6
ELEMENTO 2 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 1 2 3 4
ELEMENTO 3 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 5 6 3 4
f
i
( )
h
k
ij
( )
h
s
j
( )
h
f
ei
( )
h
j 1 =
n
h
=
CARATTERIZZAZIONE DELLA STRUTTURA
52
Tab. 2.5 Mappa per la corrispondenza dei gradi di libert dell'elemento h-esimo e
dei gradi di libert struttura
Le equazioni di congruenza, di cui alla tabella (tab. 2.2), possono quindi essere
scritte come:
2.18
Analogamente ciascun grado di libert statico (i = 1, n
h
) dell'elemento corri-
sponder biunivocamente con un grado di libert statico della struttura, indicato
con G
hi
e leggibile in corrispondenza della colonna i-esima della mappa dell'ele-
mento (tab. 2.5).
La forza ( f
i
)
h
contribuir quindi all'equilibrio della forza struttura, come
nella tabella 2.3. Formalmente questo contributo all'equilibrio si pu scrivere:
2.19
avendo indicato con la quota parte dellequazione di equilibrio corri-
spondente al contributo di ( f
i
)
h
. Sostituendo la 2.17 nella 2.19 e tenendo conto
della 2.18 si ha:
2.20
ovvero:
2.21
essendo l'incremento del coefciente dovuto al coefciente
(k
ij
)
h
dell'elemento h:
2.22
e l'incremento della componente del carico nodale equiva-
lente dovuto al carico ( f
ei
)
h
dell'elemento h:
2.23
ELEMENTO h G.D.L. ELEMENTO ... j ... i
G.D.L. STRUTTURA ... ...
G
hj
G
hi
s
j
( )
h
S
G
hj
=
F
G
hi
DF
G
hi
f
i
) (
h
=
DF
G
hi
DF
G
hi
k
ij
( )
h
S
G
hj
j 1 =
n
h
f
ei
) (
h
=
DF
G
hi
DK
G
hi
G
hj
S
G
hj
j 1 =
n
h
DF
e
( )
G
hi
=
DK
G
hi
G
hj
K
G
hi
G
hj
DK
G
hi
G
hj
k
ij
( )
h
=
DF
e
( )
G
hi
F
e
( )
G
hi
DF
e
( )
G
hi
f
ei
) (
h
=
CARATTERIZZAZIONE DELLA STRUTTURA
53
Dalla 2.22 si nota immediatamente che il coefciente di rigidezza (k
ij
)
h
dell'ele-
mento h, di coordinatei, j va ad occupare, sommandosi, una casella di coordinate
G
hi
, G
hj
della matrice di rigidezza della struttura; un analogo trasferimentosi ha
per i carichi nodali equivalenti, come si pu vedere dalla 2.23. La gura 2.4 illu-
stra gracamente questo procedimento.
Fig. 2.4 Schema di assemblaggio.
ESEMPIO 2.3
Esiste un caso in cui l'assemblaggio della matrice di rigidezza globale pu
essere effettuato in modo formalmente molto semplice.
Fig. 2.5 Struttura in serie.
il caso di strutture in serie, composte cio da elementi aventi due soli
estremi e assemblati senza ramicazioni, come nel caso di gura 2.5.
La matrice di rigidezza della struttura si ottiene disponendo le singole
matrici di rigidezza elemento lungo la diagonale principale di e
sovrapponendone i quadranti, dove la sovrapposizione corrisponde alla somma
degli elementi corrispondenti; la gura 2.6 illustra gracamente lo schema di
assemblaggio.
K [ ]
k [ ]
h
K [ ]
CARATTERIZZAZIONE DELLA STRUTTURA
54
Fig. 2.6 Schema di assemblaggio per strutture in serie.
Una caratteristica tipica della matrice di rigidezza globale, oltre alla gi vista sim-
metria, quella di presentare una struttura a banda; cio tutti i coefcienti
diversi da zero sono raccolti intorno alla diagonale principale entro una fascia la
cui ampiezza indicata con 2B-1, essendo B la semiampiezza di banda, il cui
valore generalmente di gran lunga inferiore al numero N di equazioni del
sistema.
Queste caratteristiche, associate al fatto che, come si vedr in seguito, nel pro-
cesso di soluzione la simmetria della matrice viene mantenuta e che i coefcienti
al di fuori della semiampiezza di banda non vengono alterati, permettono di
avere tutte le informazioni riguardanti la matrice stessa nei NxB coefcienti della
semibanda.
Fig. 2.7 Rappresentazione rettangolare della matrice di rigidezza.
Si pu utilizzare allora una rappresentazione rettangolare della matrice di rigi-
dezza della struttura (g. 2.7), ottenendo cos un notevole risparmio della
memoria necessaria per immagazzinare i coefcienti della matrice di rigidezza.
CARATTERIZZAZIONE DELLA STRUTTURA
55
quindi importante che la semiampiezza di banda sia la pi piccola possibile,
per ridurre al minimo lo spazio di memoria necessario. Il valore di B dipende
dallo schema di numerazione dei nodi della struttura e, se tutti i nodi hanno lo
stesso numero di gradi di libert, ricavabile da:
2.24
essendo G il numero di gradi di libert per nodo e M la massima differenza nella
numerazione tra i nodi struttura collegati tra di loro con un elemento.
Per minimizzare la semiampiezza di banda bisogna quindi minimizzare la diffe-
renza nella numerazione tra i nodi struttura collegati tra di loro con un ele-
mento. Una piccola ampiezza di banda generalmente ottenuta numerando
consecutivamente i nodi lungo la dimensione pi piccola della struttura.
ESEMPIO 2.4
Determinare la semiampiezza di banda per la struttura numerata secondo gli
schemi di gura 2.8a e b.
Fig. 2.8 Numerazione dei nodi ed am piezza di banda.
Supponendo la struttura formata da elementi asta, il numero di gradi di
libert per nodo, G pari a 2. Nel caso della gura 2.8a la massima differenza
nella numerazione nodale data da (5 1), ovvero dalla differenza nodale
delle aste verticali, ed pari a 4. La semiampiezza di banda risulta quindi:
2.25
Nel caso della gura 2.8b la massima differenza nella numerazione nodale
data da (3 1) ovvero dalla differenza nodale delle aste orizzontali, ed pari
a 2. La semiampiezza di banda risulta quindi:
2.26
La memorizzazione della matrice nel formato a banda semplice ma pu a volte
non risultare il metodo pi efciente, in special modo per matrici sparse. In tal
caso si pu utilizzare il metodo cosiddetto dello skyline, memorizzando la
matrice di rigidezza [K ] sotto forma di una matrice unidimensionale [S] for-
B G M 1 + ( ) =
B
a
2 4 1 + ( ) 10 = =
B
b
2 2 1 + ( ) 6 = =
CARATTERIZZAZIONE DELLA STRUTTURA
56
mata dai coefcienti delle colonne che giacciono sotto la skyline(g. 2.9). Per
conservare l'informazione riguardante la lunghezza effettiva di ciascuna colonna
per necessario costruire un secondo vettore [Diag] in cui memorizzare la posi-
zione nel vettore [S], degli elementi che erano sulla diagonale principale della
matrice di partenza.
Fig. 2.9 Memorizzazione con il metodo dello skyline.
2.3 CALCOLO DEGLI SPOSTAMENTI INCOGNITI
L'assemblaggio delle matrici di rigidezza e dei carichi nodali equivalenti degli
elementi costituenti una struttura porta alla seguente notazione di rigidezza:
2.27
La matrice di rigidezza nell'equazione 2.27 singolare e non pu essere invertita
per risolvere il sistema in termini di spostamenti. La ragione sica di ci dovuta
al fatto che la struttura, di cui la 2.3 rappresenta la caratterizzazione matematica,
possiede L gradi di libert di moto rigido.
Per poter risolvere il sistema 2.27 bisogner imporre le condizioni al contorno ed
in particolare:
1. introdurre le condizioni di vincolo cinematico (in un numero suf-
ciente a impedire il moto rigido della struttura); i corrispondenti ter-
mini di forze saranno incognite (reazioni vincolari)
2. introdurre le condizioni al contorno in termini di carichi; i termini
corrispondenti di spostamento saranno incogniti
da notare che quando uno spostamento noto la corrispondente forza inco-
gnita e viceversa.
K [ ] S { } F { } F
e
{ } + =
CARATTERIZZAZIONE DELLA STRUTTURA
57
Per illustrare formalmente la procedura di soluzione si immagini ora di riordi-
nare le equazioni, scambiando opportunamente righe e colonne della matrice
[K ] in modo tale che i termini di spostamento noto occupino le prime posizioni
nel vettore degli spostamenti { S}.
Dopo aver riordinato le equazioni si esegua una partizione di matrici:
2.28
avendo indicato con {S
1
} gli spostamenti noti e con {S
2
} quelli incogniti, con
{F
1
} le forze incognite o reazioni vincolari e con {F
2
} le forze note.
Operando separatamente sulle singole sottomatrici il sistema 2.28 si pu scrivere:
2.29
Si hanno cos due sottosistemi di equazioni; nel primo si hanno sia gli sposta-
menti che le forze come incognite; nel secondo le uniche incognite sono costitu-
ite dagli spostamenti. Dal secondo sottosistema verranno quindi ricavati gli
spostamenti incogniti {S
2
}:
2.30
Noti inne gli spostamenti {S
2
}, dal primo sottosistema vengono calcolate le rea-
zioni vincolari:
2.31
da notare che le operazioni di riordino delle equazioni, con la conseguente par-
tizione di matrici, e di inversione di matrice non sono effettivamente svolte nella
pratica di calcolo; sono state qui utilizzati al solo scopo di illustrare in modo for-
male lo schema di soluzione.
K
11
K
12
K
21
K
22
S
1
{ }
S
2
{ }
F
1
{ }
F
2
{ }
F
e1
{ }
F
e2
{ }
+ =
K
11
[ ] S
1
{ } K
12
[ ] S
2
{ } + F
1
{ } F
e1
{ } + =
K
21
[ ] S
1
{ } K
22
[ ] S
2
{ } + F
2
{ } F
e2
{ } + =
S
2
{ } K
22
[ ]
1
F
2
{ } F
e2
{ } K
21
[ ] S
1
{ } + ( ) =
F
1
{ } K
11
[ ] S
1
{ } K
12
[ ] S
2
{ } F
e1
{ } + =
CARATTERIZZAZIONE DELLA STRUTTURA
58
ESEMPIO 2.5
Calcolare, per la struttura di gura 2.10, gli spostamenti e le reazioni vinco-
lari quando sia applicata, nel nodo 2 una forza verticale pari a 1.
Fig. 2.10 Struttura reticolare.
La notazione di rigidezza per la struttura si ricava dalla 2.16:
2.32
Le condizioni al contorno sono:
2.33
I sottovettori degli spostamenti noti e delle reazioni vincolari sono quindi
formati da:
2.34
mentre i sottovettori degli spostamenti incogniti e delle forze note da:
2.35
1000 0 1000 0 0 0
0 1000 0 0 0 1000
1000 0 1354 354 354 354
0 0 354 354 354 354
0 0 354 354 354 354
0 1000 354 354 354 1354
U
1
V
1
U
2
V
2
U
3
V
3
F
u1
F
v1
F
u2
F
v2
F
u3
F
v3
=
U
1
0 = V
1
0 = U
3
0 = V
3
0 =
F
u2
0 = F
v2
1 =
S
1
{ }
T
U
1
V
1
U
3
V
3
{ } =
F
1
{ }
T
F
u1
F
v1
F
u3
F
v3
{ } =
S
2
{ }
T
U
2
V
2
{ } =
F
2
{ }
T
F
u2
F
v2
{ } =
CARATTERIZZAZIONE DELLA STRUTTURA
59
Il sistema 2.32, dopo aver riordinato le equazioni, diventa:
2.36
Il sistema risolutivo in termini di spostamento :
2.37
essendo nulli il vettore ed il vettore dei carichi nodali equivalenti
. La soluzione del sistema 2.37 fornisce:
2.38
Le reazioni vincolari sono date dal secondo sottosistema:
2.39
e sostituendo i valori:
2.40
La verica all'equilibrio secondo e porta a:
2.41
La gura 2.11 mostra la deformata della struttura.
1000 0 0 0 1000 0
0 1000 0 1000 0 0
0 0 354 354 354 354
0 1000 354 1354 354 354
1000 0 354 354 1354 354
0 0 354 354 354 354
U
1
V
1
U
3
V
3
U
2
V
2
F
u1
F
v1
F
u3
F
v3
F
u2
F
v2
=
1354 354
354 354
U
2
V
2
0
1
=
S
1
{ }
F
e1
{ }
U
2
1 10
3
= V
2
3.82 10
3
=
F
u1
F
v1
F
u3
F
v3
1000 0
0 0
354 354
354 354
U
2
V
2
=
F
u1
1 = F
v1
0 =
F
u3
1 = F
v3
1 =
X Y
F
u1
F
u2
F
u3
+ + 1 0 1 + 0 = =
F
v1
F
v2
F
v3
+ + 0 1 1 + 0 = =
CARATTERIZZAZIONE DELLA STRUTTURA
60
Fig. 2.11 Deformata della struttura di figura 2.10.
2.4 VINCOLI CINEMATICI
Nel paragrafo precedente stato illustrato il procedimento formale per la risolu-
zione del sistema di equazioni struttura. La suddivisione in sottomatrici della
matrice di rigidezza non tuttavia utilizzata per due motivi fondamentali:
a. il riordino delle righe e delle colonne della matrice di rigidezza non
facilmente programmabile e comporta un elevato tempo di calcolo
b. la natura a banda della matrice di rigidezza viene generalmente persa
Verranno qui descritti alcuni metodi comunemente adottati per imporre le con-
dizioni di vincolo senza alterare la natura della matrice di rigidezza globale [K].
2.42
2.4.1 Approssimazione con molle
Questo metodo permette di tener conto allo stesso modo di spostamenti nulli e
di spostamenti noti; vengono conservati tutti i gradi di libert cinematici ed i
vincoli vengono approssimati con molle molto rigide (ad esempio 10
6
volte pi
rigide degli elementi strutturali).
Si immagini che l'i-esimo grado di libert cinematico sia noto e pari ad un
valore prescritto , generalmente diverso da zero.
K
11
K
12
K
1i
K
1n
K
21
K
22
K
2i
K
2n
K
i1
K
i2
K
ii
K
in
K
n1
K
n2
K
ni
K
nn
S
1
S
2
S
i
S
n
F
1
F
2
F
i
F
n
=
S
i
S
*
i
CARATTERIZZAZIONE DELLA STRUTTURA
61
Sostituire il vincolo cinematico nella direzione di con una molla molto rigida
equivale in termini matematici a sommare una rigidezza molto grande al
coefciente sulla diagonale principale di corrispondente al grado di
libert e modicare la componente i-esima del vettore dei carichi nodali in
modo che la molla, sotto l'azione di tale componente, subisca uno spostamento
; si ha cos:
2.43
La gura 2.12 illustra la congurazione corrispondente all'applicazione di questo
metodo per la struttura di gura 2.1.
Fig. 2.12 Approssimazione delle condizioni di vincolo con molle.
Dal momento che nel sistema sono stati conservati tutti i gradi di libert della
struttura, gli spostamenti noti, nulli e non nulli, vengono ricalcolati e le reazioni
vincolari possono essere determinate senza difcolt.
2.4.2 Modica della mappa
Questo metodo tiene conto in modo esatto dei soli vincoli con spostamento
nullo (vincoli rigidi); i vincoli con spostamento noto devono essere trattati come
carichi nodali equivalenti.
Secondo questo procedimento le equazioni corrispondenti ai gradi di libert vin-
colati non sono assemblate e si considera solo il secondo sottosistema di equa-
zioni della 2.29:
2.44
essendo {S
1
} = {0}.
S
i
K
*
K
ii
K [ ]
S
i
S
*
i
K
ii
K
ii
K
*
+ =
F
i
K
*
S
i
*
=
K
22
[ ] S
2
{ } F
2
{ } F
e2
{ } + =
CARATTERIZZAZIONE DELLA STRUTTURA
62
Ci equivale a numerare solo le equazioni struttura corrispondenti ai gradi di
libert non vincolati. Procedendo in tal modo vengono per perse le informa-
zioni necessarie al calcolo delle reazioni vincolari; se richiesto il calcolo di que-
ste ultime bisogner assemblare a parte le equazioni necessarie al calcolo.
ESEMPIO 2.6
Scrivere il sistema risolutivo della struttura di gura 2.13 utilizzando la modi-
ca della mappa per l'applicazione dei vincoli cinematici.
Fig. 2.13 Numerazione delle equazioni struttura.
Le equazioni struttura sono numerate come illustrato in gura 2.13, e cio
l'equazione n. 1 corrisponder al grado di libert secondo del nodo 2 e
l'equazione n. 2 al grado di libert del nodo 2 secondo ; le equazioni corri-
spondenti ai gradi di libert dei nodi 1 e 3 non sono numerate in quanto gli
spostamenti orizzontali e verticali dei nodi 1 e 3 sono impediti.
La mappa, cio la corrispondenza tra gradi di libert elemento e gradi di
libert struttura e tra equazioni elemento e equazioni struttura data dalla
tabella 2.6.
X
Y
CARATTERIZZAZIONE DELLA STRUTTURA
63
Tab. 2.6 Mappa per la corrispondenza delle equazioni elemento e equazioni struttura
Le equazioni dell'elemento n. 1 non corrispondono a nessuna equazione strut-
tura in quanto i due nodi tra i quali compreso l'elemento 1 sono entrambi
vincolati. Contribuiscono alle equazioni struttura solo le equazioni 3 e 4
dell'elemento 2:
2.45
e le equazioni 3 e 4 dell'elemento 3:
2.46
per cui la matrice di rigidezza della struttura vincolata:
2.47
che corrisponde alla 2.37.
ELEMENTO 1 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 0 0 0 0
ELEMENTO 2 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 0 0 1 2
ELEMENTO 3 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 0 0 1 2
k [ ]
2
1000 0 1000 0
0 0 0 0
1000 0 1000 0
0 0 0 0
=
k [ ]
3
354 354 354 354
354 354 354 354
354 354 354 354
354 354 354 354
=
K [ ]
1000 354 + 0 354
0 354 0 354 +
=
CARATTERIZZAZIONE DELLA STRUTTURA
64
2.4.3 Modica della matrice di rigidezza
Un terzo modo, che permette di descrivere anche spostamenti diversi da zero,
consiste nel sostituire la condizione in tutte le equazioni del sistema,
portare al secondo membro tutti i termini noti, annullare la riga e la colonna
corrispondenti al grado di libert i-esimo e sostituire al termine K
ii
il coefciente
1, scrivendo cos l'i-esima equazione banale .
Anche in tal modo vengono per perse le informazioni necessarie al calcolo delle
reazioni vincolari; se necessario il calcolo di queste ultime bisogner assemblare
a parte le equazioni necessarie al calcolo.
2.48
ESEMPIO 2.7
Imporre le condizioni di vincolo per la struttura di gura 2.13 utilizzando la
modica della matrice di rigidezza.
La notazione di rigidezza della struttura data dalla 2.32; imponendo le con-
dizioni al contorno:
2.49
il sistema risolutivo diventa:
2.50
S
i
S
i
*
=
S
i
S
i
*
=
K
11
K
12
0 K
1n
K
21
K
22
0 K
2n
0 0 1 0
K
n1
K
n2
0 K
nn
S
1
S
2
S
i
S
n
F
1
K
1i
S
i
*
F
2
K
2i
S
i
*
S
i
*
F
n
K
ni
S
i
*
=
U
1
U
1
*
=
U
3
U
3
*
=
F
u2
0 =
V
1
V
1
*
=
V
3
V
3
*
=
F
v2
1 =
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1354 354 0 0
0 0 354 354 0 0
0 0 0 0 1 0
0 0 0 0 0 1
U
1
V
1
U
2
V
2
U
3
V
3
U
1
*
V
1
*
F
u2
*
F
v2
*
U
3
*
V
3
*
=
CARATTERIZZAZIONE DELLA STRUTTURA
65
con:
2.51
Volendo determinare le reazioni vincolari un procedimento possibile per il cal-
colo manuale il seguente: si moltiplica la colonna della matrice di rigidezza
relativa allo spostamento noto per tale termine e si porta il vettore cos ottenuto
a secondo membro del sistema di equazioni, lasciando al primo membro le sole
incognite geometriche. Si ottiene cos un sistema risolutivo in cui il vettore degli
spostamenti ha, rispetto a quello iniziale, un numero di coefcienti minore; la
differenza data dal numero degli spostamenti noti e diversi da zero.
ESEMPIO 2.8
Calcolare, per la struttura di gura 2.14, gli spostamenti e le reazioni vinco-
lari, dove l'appoggio di destra, indicato con il numero 2, ha subito un cedi-
mento pari a rispetto alla posizione indeformata.
Fig. 2.14 Spostamenti imposti.
Il sistema di equazioni associato alla struttura:
2.52
Essendo noto si moltiplica la colonna della matrice di rigidezza relativa a
tale spostamento, cio la terza colonna, per il valore del cedimento e si
F
u2
*
0 1000U
1
*
354U
3
*
354V
3
*
+ + =
F
v2
*
1 354U
3
*
354V
3
*
+ =
d
EJ
z
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
4
l
---
6
l
2
-----
2
l
---
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
2
l
---
6
l
2
-----
4
l
---
V
1
A
1
V
2
A
2
F
1
M
1
F
2
M
2
=
V
2
d
CARATTERIZZAZIONE DELLA STRUTTURA
66
porta il vettore cos ottenuto a secondo membro:
2.53
Imponendo le altre condizioni di vincolo , , si ricava:
2.54
Le reazioni vincolari vengono determinate da:
2.55
da cui:
2.56
2.5 PROBLEMI PARTICOLARI RELATIVI AI VINCOLI
2.5.1 Vincoli elastici
Le strutture illustrate in gura 2.15a e 2.15b sono caratterizzate da vincoli cine-
matici elastici. La prima presenta un appoggio elastico all'estremit destra, indi-
cata con il numero 2; la seconda un vincolo alla rotazione elastico all'estremit
sinistra, indicata con il numero 1.
EJ
z
12
l
3
------
6
l
2
-----
6
l
2
-----
6
l
2
-----
4
l
---
2
l
---
12
l
3
------
6
l
2
-----
6
l
2
----
6
l
2
-----
2
l
---
4
l
---
V
1
A
1
A
2
F
1
M
1
F
2
M
2
EJ
z
d
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
=
V
1
0 = A
1
0 =
A
2
3d
2l
------ =
F
1
M
1
F
2
EJ
z
6
l
2
-----
2
l
---
6
l
2
-----
A
2
EJ
z
d
12
l
3
------
6
l
2
-----
12
l
3
------
+ =
F
1
3EJ
z
d
l
3
-------------- =
M
1
3EJ
z
d
l
2
-------------- =
F
2
3EJ
z
d
l
3
-------------- =
CARATTERIZZAZIONE DELLA STRUTTURA
67
Fig. 2.15 Vincoli elastici.
La reazione che esercita un vincolo elastico proporzionale alla deformazione
vincolare secondo il coefciente di rigidezza proprio del vincolo stesso; nei casi
della gura 2.15 si ha:
2.57
In generale il vincolo elastico agisce esercitando una reazione, ovvero un carico
applicato dall'esterno, proporzionale al suo cedimento. In termini matriciali si
ha:
2.58
dove [ K ] la matrice di rigidezza della struttura, {S} il vettore degli sposta-
menti generalizzati, {F } il vettore dei carichi nodali, {F
e
} il vettore dei carichi
nodali equivalenti e {-K
e
S} il vettore dei carichi ai nodi dovuti alle reazioni vin-
colari elastiche. Portando al primo membro i termini che contengono gli sposta-
menti ed al secondo membro tutti gli altri:
2.59
Il termine {K
e
S} pu essere riscritto come:
2.60
dove [K
e
] una matrice diagonale, cio una matrice in cui i soli coefcienti
diversi da zero sono quelli della diagonale principale e rappresentano le rigidezze
dei vincoli elastici. Raccogliendo {S} a fattor comune la 2.59 diventa:
2.61
F
2
K
v
V
2
=
M
1
K
r
A
1
=
K [ ] S { } F { } F
e
{ } K
e
S { } + + =
K [ ] S { } K
e
S { } + F { } F
e
{ } + =
K
e
S { } K
e
[ ] S { } =
K [ ] K
e
[ ] + [ ] S { } F { } F
e
{ } + =
CARATTERIZZAZIONE DELLA STRUTTURA
68
ESEMPIO 2.9
Ricavare per il sistema di gura 2.15a gli spostamenti dell'estremo destro
quando sia applicato un carico verticale al nodo 2.
La 2.61 esplicitata :
2.62
Imponendo le condizioni al contorno:
2.63
si ha:
2.64
e, risolvendo il sistema:
2.65
2.5.2 Strutture con cerniere interne
Si pu vericare il caso di strutture in cui due elementi trave siano uniti tra di
loro tramite una cerniera, come illustrato in gura 2.16; questo tipo di collega-
mento interrompe la continuit delle rotazioni.
Fig. 2.16 Struttura con cerniere interne.
F
EJ
z
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
4
l
---
6
l
2
-----
2
l
---
12
l
3
------
6
l
2
-----
12
l
3
------
6
l
2
-----
6
l
2
-----
2
l
---
6
l
2
-----
4
l
---
0 0 0 0
0 0 0 0
0 0 K
v
0
0 0 0 0
+
V
1
A
1
V
2
A
2
F
1
M
1
F
2
M
2
=
V
1
0 =
F
2
F =
A
1
0 =
M
2
0 =
12EJ
z
l
3
-------------- K
v
+
6EJ
z
l
2
-----------
6EJ
z
l
2
-----------
4EJ
z
l
-----------
V
2
A
2
F
0
=
V
2
Fl
3
3EJ
z
K
v
l
3
+
----------------------------- =
A
2
3Fl
2
6EJ
z
2K
v
l
3
+
-------------------------------- =
CARATTERIZZAZIONE DELLA STRUTTURA
69
I due elementi in cui stata suddivisa la struttura sono collegati nel nodo 2 tra-
mite una cerniera, attraverso la quale non si trasmette il momento ettente; in
questo punto sono diverse le rotazioni degli estremi degli elementi concorrenti
nel nodo.
Nel nodo 2 si introducono quindi tre gradi di libert cinematici: lo spostamento
V
2
, la rotazione a sinistra della cerniera e la rotazione a destra della
cerniera. Verranno pertanto scritte tre equazioni di equilibrio nel nodo 2, una
alla traslazione verticale e due alla rotazione:
2.66
La struttura sar quindi caratterizzata da sette gradi di libert cinematici, ordi-
nati come segue:
2.67
e la numerazione delle equazioni struttura quella indicata in gura 2.17.
Fig. 2.17 Numerazione equazioni struttura.
La mappa delle equazioni elemento e equazioni struttura indicata nella
tabella 2.7.
Tab. 2.7 Mappa per la corrispondenza dei gradi di libert elemento e dei gradi di
libert struttura per il sistema di gura 2.16
ELEMENTO 1 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 1 2 3 4
ELEMENTO 2 G.D.L. ELEMENTO 1 2 3 4
G.D.L. STRUTTURA 3 5 6 7
A
2
( )' A
2
( )''
f
2
( )
1
f
1
( )
2
+ F
2
=
m
2
( )
1
M
2
( ) =
m
1
( )
2
M
2
( )! =
S { }
T
V
1
A
1
V
2
A
2
( ) A
2
( )! V
3
A
3
{ } =
CARATTERIZZAZIONE DELLA STRUTTURA
70
La matrice di rigidezza globale, scritta in forma simbolica, :
2.68
avendo indicato rispettivamente con e i coefcienti della matrice di rigi-
dezza del primo elemento e del secondo elemento
2.6 CALCOLO DELLE TENSIONI
Determinati gli spostamenti {S} della struttura possibile calcolare le forze ele-
mento e le tensioni negli elementi costituenti la struttura facendo riferimento
alla scrittura di rigidezza dell'elemento ed alle relazioni che legano deformazioni
e tensioni agli spostamenti elemento.
Noti infatti gli spostamenti della struttura gli spostamenti dell'elemento hesimo
sono ricavabili dalla mappa di corrispondenza tra i gradi di libert ele-
mento e gradi di libert struttura; dopo aver calcolato le componenti degli spo-
stamenti nel sistema di riferimento locale tramite la 1.53, le forze elemento
sono ricavabili dalla 1.93:
2.69
Per gli elementi esaminati nel capitolo 1. le forze elemento rappresentano le
caratteristiche delle sollecitazioni ed hanno quindi anche il signicato di ten-
sioni. Nel caso pi generale le tensioni saranno calcolabili in funzione degli spo-
stamenti elemento; ad esempio nel caso della barra sollecitata assialmente la
deformazione data da 1.2:
2.70
e la tensione, nel caso in cui non siano presenti deformazioni o tensioni iniziali,
da:
2.71
a
11
a
12
a
13
a
14
0 0 0
a
21
a
22
a
23
a
24
0 0 0
a
31
a
32
a
33
b
11
+ a
34
b
12
b
13
b
14
a
41
a
42
a
43
a
44
0 0 0
0 0 b
21
0 b
22
b
23
b
24
0 0 b
31
0 b
32
b
33
b
34
0 0 b
41
0 b
42
b
43
b
44
V
1
A
1
V
2
A
2
( )
A
2
( )!
V
3
A
3
F
1
M
1
F
2
M
2
( )
M
2
( )!
F
3
M
3
=
a
ij
b
ij
S { }
s { }
h
s { }
h
f } {
h
k [ ]
h
s { }
h
f
e
} {
h
=
e
u
2
u
1
l
---------------- =
s Ee E
u
2
u
1
l
---------------- = =
CARATTERIZZAZIONE DELLA STRUTTURA
71
ESEMPIO 2.10
Calcolare le forze elemento per gli elementi 2 e 3 dell'esempio 2.5.
Le matrici di rigidezza nel sistema di riferimento globale degli elementi
2 e 3 sono date dalle 2.14 e 2.15, mentre gli spostamenti dei nodi struttura
sono dati dalle 2.33 e 2.34:
2.72
Dalla mappa di corrispondenza dei gradi di libert (tab. 2.4) si ricava che gli
spostamenti dell'elemento 2 e quelli dell'elemento 3, rispetto al sistema di
riferimento globale sono:
2.73
2.74
Le forze elemento, espresse anche loro nel sistema di riferimento globale,
risultano, per l'elemento 2:
2.75
2.76
e, per l'elemento 3:
2.77
2.78
Il lettore potr vericare l'equilibrio dei nodi 1, 2 e 3, essendo nulle le forze
elemento per l'elemento 1. Nel sistema di riferimento locale le forze elemento
sono espresse da:
2.79
2.80
XY ,
S { }
T
0 0 1 10
3
3.82 10
3
0 0
=
S { }
T
S
1
S
2
S
3
S
4
{ } 0 0 1 10
3
3.82 10
3
= =
S { }
T
S
5
S
6
S
3
S
4
{ } 0 0 1 10
3
3.82 10
3
= =
f
u1
f
v1
f
u2
f
v2
2
1000 0 1000 0
0 0 0 0
1000 0 1000 0
0 0 0 0
0
0
1 10
3
3.82 10
3
=
f } {
2
T
1 0 1 0 { } =
f
u1
f
v1
f
u2
f
v2
3
354 354 354 354
354 354 354 354
354 354 354 354
354 354 354 354
0
0
1 10
3
3.82 10
3
=
f } {
3
T
1 1 1 1 { } =
f } {
2
T
1 0 1 0 { } =
f } {
3
T
1.414 0 1.414 0 { } =
CARATTERIZZAZIONE DELLA STRUTTURA
72
Infatti per l'elemento 2 il sistema di riferimento locale coincide con quello
globale, mentre il sistema di riferimento locale dell'elemento 3 forma un
angolo di 45 con il sistema di riferimento globale, per cui la matrice di
rotazione :
2.81
Si sarebbero potute ottenere le forze elemento direttamente nel sistema di
riferimento locale utilizzando l'espressione di rigidezza scritta nel sistema di
riferimento locale. Per l'elemento 3 il vettore degli spostamenti vale:
2.82
con data dalla 2.81. Si ha quindi:
2.83
La matrice di rigidezza dell'elemento 3, nel sistema di riferimento locale
data da:
2.84
Le forze elemento, nel sistema di riferimento locale, sono quindi date dalla
2.78.
2.7 SCHEMA DI RISOLUZIONE
La procedura di calcolo di una struttura pu essere sintetizzata nelle seguenti
fasi:
a. suddivisione della struttura in elementi e numerazione dei nodi struttura
b. costruzione della mappa di corrispondenza tra equazioni elemento ed
equazioni struttura
c. per ciascun elemento: calcolo della matrice di rigidezza e del vettore
dei carichi nodali equivalenti
d. assemblaggio della matrice di rigidezza della struttura e del vettore dei
carichi nodali equivalenti struttura
e. imposizione delle condizioni di vincolo
f. soluzione del sistema in termini di spostamenti generalizzati; nel cal-
colo manuale conveniente seguire il procedimento indicato in 2.3 e
R [ ]
R [ ]
0.707 0.707 0 0
0.707 0.707 0 0
0 0 0.707 0.707
0 0 0.707 0.707
=
s { }
X
s { }
x
R [ ] s { }
X
=
R [ ]
s { }
x
0 0 2 10
3
2 10
3
{ } =
k [ ]
x
0.707 0 0.707 0
0 0 0 0
0.707 0 0.707 0
0 0 0 0
=
CARATTERIZZAZIONE DELLA STRUTTURA
73
cio suddividere il sistema in due sottosistemi: uno che ha come inco-
gnite i soli spostamenti, l'altro che contiene a secondo membro le rea-
zioni vincolari
g. calcolo delle reazioni vincolari
h. per ciascun elemento estrarre dal vettore { S} gli spostamenti elemento
e calcolare le forze elemento e le tensioni;
i. per altri casi di carico ripetere i passi da f a h
2.8 PROBLEMA DINAMICO: CALCOLO DELLE FREQUENZE PROPRIE
I problemi di analisi strutturale dinamica possono essere suddivisi in due classi:
lo studio della risposta dinamica di una struttura soggetta a forze o spostamenti
imposti variabili nel tempo ed il calcolo delle vibrazioni proprie e dei corrispon-
denti modi di vibrare.
Entrambi i tipi di problemi richiedono tecniche di calcolo particolari, che ver-
ranno descritte in seguito, e che sono in gran parte indipendenti dal metodo
degli elementi niti. Infatti tali tecniche presumono la disponibilit delle matrici
di rigidezza, delle masse e di smorzamento indipendentemente dal metodo con
cui queste matrici sono state ottenute.
Verr qui illustrato, a titolo di introduzione ed utilizzando tecniche elementari, il
calcolo delle vibrazioni proprie. Si rimanda a testi specialistici per lo studio dei
metodi numerici adottati normalmente dai codici di calcolo.
Si ricorda che l'equazione di equilibrio dinamico, nel caso di un sistema ad un
grado di libert :
2.85
avendo indicato con mla massa del sistema, con clo smorzamento e con k la sua
rigidezza; f (t) rappresenta il carico, funzione del tempo.
Nel caso di un sistema con pi gradi di libert la 2.85 viene scritta:
2.86
in tal caso [M ] rappresenta la matrice delle masse del sistema, [C] la matrice
degli smorzamenti e [K ] la matrice di rigidezza; rappresenta il vettore delle
accelerazioni, il vettore delle velocit e {S} il vettore degli spostamenti.
In assenza di dissipazioni la 2.86 si trasforma nella:
2.87
mentre se non ci sono effetti d'inerzia e le forze sono costanti nel tempo si ricade
nell'espressione 2.1 del caso statico, che pu quindi essere visto come un caso
mu
cu
ku + + f t ( ) =
M [ ] S
{ } C [ ] S
{ } K [ ] S { } + + f t ( )} { =
S
{ }
S
{ }
M [ ] S
{ } K [ ] S { } + f t ( )} { =
CARATTERIZZAZIONE DELLA STRUTTURA
74
particolare della 2.86.
In assenza di dissipazioni le vibrazioni proprie, cio quelle che si instaurano nel
sistema in mancanza di azioni forzanti esterne, sono caratterizzate dal fatto che
tutti i punti della struttura vibrano in fase, cio raggiungono la loro elongazione
massima nello stesso istante. Essendo le oscillazioni in questo caso notoriamente
sinusoidali possibile esprimere la 2.87 in funzione dei valori massimi di accele-
razione e spostamento e della frequenza di vibrazione:
2.88
dove w rappresenta la pulsazione della vibrazione e {S
o
} il vettore degli sposta-
menti massimi. Derivando due volte la 2.88 rispetto al tempo si ha:
2.89
La 2.87 si riscrive pertanto, in assenza di forzanti esterne:
2.90
2.91
Si ottiene un sistema omogeneo che ammette la soluzione banale {S
o
} = 0, che
corrisponde allo stato di quiete, a meno che si nullo il determinante dei coef-
cienti:
2.92
La 2.92 una equazione algebrica in w
2
, le cui soluzioni forniscono gli autovalori
del problema, che in questo caso hanno sicamente il signicato di valori della
pulsazione della vibrazione.
da notare che, contrariamente al caso statico, non necessario che la matrice
di rigidezza [K ] sia denita positiva, cio non necessario che il sistema sia vin-
colato per poter risolvere la 2.92. In tal caso si otterranno degli autovalori nulli,
che corrispondono ai gradi di libert di moto rigido della struttura.
Noti gli autovalori del sistema possibile ricavare, sempre dalla 2.8, gli auto-
vettori (o forme modali o modi di vibrare) corrispondenti a ciascun autova-
lore . Si ricorda, a tal proposito, che gli autovettori
i
sono determinati a
meno di una costante; possibile cio ricavare la forma del modo di vibrare, ma
non le ampiezze dell'oscillazione.
S { } S
o
{ } wt ( ) cos =
S
{ } w
2
S
o
{ } wt ( ) cos =
w
2
M [ ] S
o
{ } K [ ] S
o
{ } + 0 =
w
2
M [ ] K [ ] + ( ) S
o
{ } 0 =
det K [ ] w
2
M [ ] ( ) 0 =
w
i
f
i
w
i
CARATTERIZZAZIONE DELLA STRUTTURA
75
ESEMPIO 2.11
Calcolare le frequenze proprie di vibrazione di un sistema costituito da una
barra, priva di massa, recante agli estremi due masse, rispettivamente e
(g. 2.18).
Fig. 2.18 Sistema con due masse.
Si pu considerare la struttura composta di un solo elemento; la matrice di
rigidezza globale pertanto:
2.93
mentre la matrice delle masse vale:
2.94
Il sistema risolutivo , non avendosi vincoli:
2.95
Annullando il determinante dei coefcienti:
2.96
si ottengono le soluzioni:
2.97
m
1
m
2
K [ ]
EA
l
-------
EA
l
-------
EA
l
-------
EA
l
-------
=
M [ ]
m
1
0
0 m
2
=
EA
l
------- w
2
m
1
EA
l
-------
EA
l
-------
EA
l
------- w
2
m
2
U
1
U
2
0
0
=
m
1
m
2
( )w
4
EA
m
1
m
2
+
l
--------------------
w
2
0 =
w
1
2
0 =
w
2
2
EA
m
1
m
2
+
lm
1
m
2
-------------------- =
CARATTERIZZAZIONE DELLA STRUTTURA
76
Il primo autovalore corrisponde ad uno stato di quiete, e compare in quanto il
sistema privo di vincoli.
L'autovettore, o modo di vibrare, corrispondente al secondo autovalore si
ottiene sostituendo indifferentemente nella prima o seconda equazione
del sistema 2.95; si ha:
2.98
Questo un risultato ben noto della meccanica elementare, secondo il quale
le ampiezze di oscillazione sono inversamente proporzionali alle masse, e
quindi il baricentro del sistema resta fermo.
ESEMPIO 2.12
Calcolare le frequenze di vibrazione assiali ed i corrispondenti modi di vibrare
della struttura di gura 2.19.
Fig. 2.19 Struttura con due masse.
La struttura pu essere considerata costituita da due elementi barra, in
quanto sono richieste le frequenze di vibrazione assiale; le matrici di rigidezza
e delle masse dell'elemento 1 sono:
2.99
e quelle dell'elemento 2:
2.100
Assemblando le matrici di rigidezza e delle masse, valendo per queste ultime
le stesse regole delle prime, si ottiene:
2.101
w
2
U
1
m
2
m
1
------ U
2
=
k [ ]
1
EA
l
-------
1 1
1 1
= m [ ]
1
0 0
0 m
2
=
k [ ]
2
EA
l
-------
1 1
1 1
= m [ ]
2
0 0
0 m
3
=
EA
l
-------
1 1 0
1 2 1
0 1 1
w
2
0 0 0
0 m
2
0
0 0 m
3
U
1
U
2
U
3
F
1
F
2
F
3
=
CARATTERIZZAZIONE DELLA STRUTTURA
77
Imponendo le condizioni di vincolo e separando le equazioni che non conten-
gono le reazioni vincolari:
2.102
Annullando il determinante dei coefcienti:
2.103
si ottengono i due autovalori:
2.104
Assumendo , , , si ha:
2.105
Il primo modo di vibrare viene calcolato dalla 2.102 sostituendo ad il
valore di :
2.106
Assumendo si ricava ; essendo , la forma corri-
spondente al primo modo di vibrare data quindi da:
2.107
Il secondo modo di vibrare viene calcolato dalla 2.102 sostituendo ad w il
valore di :
2.108
Assumendo si ricava ; essendo , la forma cor-
rispondente al secondo modo di vibrare data da:
2.109
EA
l
-------
2 1
1 1
w
2
m
2
0
0 m
3
U
2
U
3
0
0
=
2
EA
l
------- m
2
w
2
EA
l
------- m
3
w
2
EA
l
-------
2
0 =
w
1 2 ,
2
EA
l
-------
1
m
2
------
1
2m
3
---------- +
1
m
2
------
2
1
2m
3
----------
2
+ =
EA l 1 = m
2
1 = m
3
1 =
w
1
2
0.382 =
w
2
2
2.618 =
w
w
1
EA
l
-------
2 1
1 1
0.382
m
2
0
0 m
3
U
2
U
3
0
0
=
U
2
1 = U
3
1.618 = U
1
0 =
f { }
1
T
0 1 1.618 { } =
w
2
EA
l
-------
2 1
1 1
2.618
m
2
0
0 m
3
U
2
U
3
0
0
=
U
2
1 = U
3
0.618 = U
1
0 =
f { }
1
T
0 1 0.618 { } =
CARATTERIZZAZIONE DELLA STRUTTURA
78
Le gure 2.20 e 2.21 illustrano i due modi di vibrare.
Fig. 2.20 Primo modo di vibrazione della struttura delles. 2.12.
Fig. 2.21 Secondo modo di vibrazione della struttura delles. 2.12.
ESEMPIO 2.13
Calcolare le frequenze di vibrazione assiali ed i corrispondenti modi di vibrare
della struttura di gura 2.22 quando siano concentrate ai nodi tre masse
di valori unitari; si considerino gli elementi strutturali privi di
massa.
Fig. 2.22 Struttura reticolare con tre masse.
m
1
m
2
m
3
, ,
CARATTERIZZAZIONE DELLA STRUTTURA
79
La matrice di rigidezza della struttura data dalla 2.16; la matrice delle
masse :
2.110
Imponendo le condizioni di vincolo e separando le equazioni che non conten-
gono le reazioni vincolari:
2.111
Annullando il determinante dei coefcienti:
2.112
si ottengono i due autovalori:
2.113
Il primo modo di vibrare si ottiene dalla 2.111 sostituendo ad il valore di :
2.114
Assumendo si ricava ; la forma corrispondente al primo
modo di vibrare data quindi da:
2.115
Il secondo modo di vibrare si ottiene dalla 2.111 sostituendo ad w il valore
di :
2.116
Assumendo si ricava ; la forma corrispondente al
secondo modo di vibrare data quindi da:
2.117
M [ ]
m
1
0 0 0 0 0
0 m
1
0 0 0 0
0 0 m
2
0 0 0
0 0 0 m
2
0 0
0 0 0 0 m
3
0
0 0 0 0 0 m
3
=
1354 354
354 354
w
2
1 0
0 1
U
2
V
2
0
0
=
1354 w
2
( ) 354 w
2
( ) 354
2
0 =
w
1
2
241.37 =
w
2
2
1466.63 =
w w
1
1354 354
354 354
241.37
1 0
0 1
U
2
V
2
0
0
=
U
2
1 = V
2
3.14 =
f { }
1
T
0 0 1 3.14 0 0 { } =
w
2
1354 354
354 354
1466.63
1 0
0 1
U
2
V
2
0
0
=
U
2
1 = V
2
0.32 =
f { }
2
T
0 0 1 0.32 0 0 { } =
CARATTERIZZAZIONE DELLA STRUTTURA
80
Le gure 2.23a e 2.23b illustrano i due modi di vibrare.
Fig. 2.23 Modi di vibrare per la struttura delles. 2.13.
2.9 SOLUZIONE DEL SISTEMA DI EQUAZIONI
In 2.3 stata illustrata formalmente la soluzione del sistema di equazioni:
2.118
mediante l'operazione di inversione della matrice [K ].
Inoltre negli esempi svolti in precedenza la dimensione dei sistemi da risolvere ha
permesso l'utilizzo di tecniche elementari; non evidentemente questo il caso
dei sistemi reali in cui la complessit del modello di gran lunga superiore.
L'efcienza dell'analisi agli elementi niti dipende in gran parte dalle metodolo-
gie numeriche adottate per risolvere il sistema di equazioni, anche sfruttando le
particolari caratteristiche della matrice di rigidezza, tra le quali la simmetria e la
struttura a banda.
I metodi risolutivi di un sistema di equazioni possono essere raggruppati in due
classi: procedimenti iterativi o indiretti e tecniche di soluzione diretta.
Il metodo iterativo consiste in una serie di successive correzioni ad una prima
stima della soluzione nch il valore di tale correzione diventa nullo o comunque
inferiore ad un errore pressato. Ovviamente, data la natura iterativa del
metodo, non possibile predeterminare il numero di operazioni necessario alla
risoluzione del sistema.
Il metodo diretto un procedimento in cui il sistema di equazioni risolto in
maniera esatta, nei limiti di approssimazione del calcolo, ed il numero di opera-
K [ ] S { } F { } =
CARATTERIZZAZIONE DELLA STRUTTURA
81
zioni da effettuare per la risoluzione del sistema esattamente predeterminato.
Entrambi i metodi di soluzione presentano vantaggi e svantaggi; tra i vantaggi
dei metodi indiretti si hanno: la estrema facilit di programmazione, le poche
iterazioni necessarie per determinare una soluzione approssimata. Svantaggi
principali sono: impossibilit di predeterminare il tempo di soluzione, impossi-
bilit di trattare rapidamente pi casi di carico.
Allo stato attuale i metodi diretti risultano pi efcaci e sono quelli pi adottati.
Tuttavia i metodi indiretti possono risultare pi convenienti nel caso di rianalisi
di un problema in seguito a leggere modiche della struttura e/o nell'analisi di
problemi non lineari; infatti in questi casi generalmente si ha gi a disposizione
una ottima stima del vettore delle incognite e sono quindi necessarie solo poche
iterazioni per la soluzione del problema.
2.9.1 Metodi di soluzione indiretti: metodo di Gauss-Seidel
Il metodo iterativo di Gauss-Seidel stato uno dei pi utilizzati nei primi codici
di calcolo agli elementi niti.
In generale l'i-esima equazione del sistema di n equazioni 2.118 pu essere scritta
come:
2.119
ovvero:
2.120
In un processo iterativo chiaramente necessario conoscere una stima iniziale
{S}
1
delle incognite, stima che pu essere rappresentata da un vettore nullo se
non si hanno a disposizione valori pi rappresentativi. All'iterazione m-esima si
avr dunque:
2.121
Il ciclo di iterazioni continua nch:
2.122
dove e la tolleranza di convergenza.
La velocit di convergenza pu essere aumentata introducendo un fattore di
sovrarilassamento b e modicando il valore stimato dalla 2.121 nel seguente
K
ij
S
j
j 1 =
i 1
K
ii
S
i
K
ij
S
j
j i 1 + =
n
+ + F
i
=
S
i
1
K
ii
------ F
i
K
ij
S
j
j 1 =
i 1
K
ij
S
j
j i 1 + =
n
=
S
i
m
1
K
ii
------ F
i
K
ij
S
j
m
j 1 =
i 1
K
ij
S
j
m 1
j i 1 + =
n
=
S { }
m 1 +
S { }
m
e <
S
i
m
CARATTERIZZAZIONE DELLA STRUTTURA
82
modo:
2.123
per cui la 2.4 diventa:
2.124
Il fattore di sovrarilassamento b generalmente compreso tra 1 e 2; il valore otti-
male di b una funzione del problema in esame, ma spesso si assume un valore
di b = 1.6.
Una interpretazione sica dell'equazione iterativa 2.124 che la quantit tra
parentesi tonde rappresenta lo squilibrio tra il carico applicato e la risposta
elastica della struttura. Il ciclo iterativo cerca lo spostamento che rende nullo
questo squilibrio.
2.9.2 Metodi di soluzione diretti: metodo di Gauss
Le tecniche di soluzione diretta comunemente adottate sono fondamentalmente
applicazioni del metodo di eliminazione proposto da Gauss.
Il metodo di Gauss pu essere suddiviso in due fasi principali: la prima fase con-
siste nel triangolarizzare la matrice dei coefcienti [K ] in modo che tutti i ter-
mini della matrice al di sotto della diagonale principale siano nulli; il vettore dei
termini noti {F } viene modicato conformemente. La seconda fase consiste nel
calcolo delle incognite {S} procedendo a ritroso dall'ultima equazione alla
prima.
Per illustrare le due fasi del metodo di eliminazione di Gauss si esamini in detta-
glio il sistema di equazioni:
2.125
Il primo passo del processo di triangolarizzazione viene effettuato come segue:
dalla prima equazione si ricava simbolicamente S
1
e si sostituisce nelle successive
equazioni. In questo modo si rendono nulli tutti i termini della prima colonna,
eccetto quello appartenente alla prima riga. Fisicamente questo corrisponde ad
eliminare il grado di libert S
1
dalla struttura, come si vedr in seguito.
S
i
m
S
i
m 1
b S
i
m
S
i
m 1
( ) + =
S
i
m
b
K
ii
------ F
i
K
ij
S
j
m
j 1 =
i 1
K
ij
S
j
m 1
j i 1 + =
n
=
F
i
S
i
K
11
K
1i
K
1n
K
i1
K
ii
K
in
K
n1
K
ni
K
nn
S
1
S
i
S
n
F
1
F
i
F
n
=
CARATTERIZZAZIONE DELLA STRUTTURA
83
L'eliminazione di S
1
viene eseguita come segue; si sottrae la prima equazione
moltiplicata per dalla i-esima equazione, con i = 2, n:
2.126
ovvero:
2.127
Dalla seconda equazione si ricava ora S
2
e si sostituisce nelle successive equa-
zioni, con i = 3, n. In questo modo si rendono nulli tutti i termini, eccetto i
primi due, della seconda colonna. Fisicamente questo corrisponde ad eliminare il
grado di libert S
2
dalla struttura.
La stessa operazione di eliminazione viene ora applicata a tutte le restanti equa-
zioni (i = 3, n).
Ottenuta cos la triangolarizzazione della matrice [K ], si procede alla seconda
fase, in cui vengono calcolate le incognite { S}, risolvendo per l'ultima in modo
diretto:
2.128
e quindi, con procedimento a ritroso, risolvendo per sostituzione per le rima-
nenti incognite:
2.129
dove e sono rispettivamente i termini della matrice [K] triangolarizzata
e del vettore dei termini noti modicato conformemente alla triangolarizzazione
della matrice [K].
K
i1
K
11
( )
K
11
K
1i
K
1n
0 K
ii
K
1i
K
i1
K
11
-------- K
in
K
1n
K
i1
K
11
--------
0 K
ni
K
1i
K
n1
K
11
--------- K
nn
K
1n
K
n1
K
11
---------
S
1
S
i
S
n
F
1
F
i
F
1
K
i1
K
11
--------
F
n
F
1
K
n1
K
11
---------
=
K
11
K
1i
K
1n
0 K
ii
*
K
in
*
0 K
ni
*
K
nn
*
S
1
S
i
S
n
F
1
F
i
*
F
n
*
=
S
n
F
n
*
K
nn
*
----------- =
S
i
1
K
ii
*
--------- F
i
*
K
ij
*
S
j
j i 1 + =
n
=
K
ij
*
F
i
*
CARATTERIZZAZIONE DELLA STRUTTURA
84
ESEMPIO 2.14
Per illustrare formalmente le due fasi del metodo si supponga di eseguire una
partizione del sistema 2.125 in modo da avere:
2.130
con:
[K
11
] matrice di ordine (1 x 1)
[K
12
] matrice di ordine (1 x (n-1))
[K
21
] matrice di ordine ((n-1) x 1)
[K
22
] matrice di ordine ((n-1) x (n-1))
{S
1
},{F
1
} vettori di ordine 1
{S
2
},{F
2
} vettori di ordine (n-1)
Il metodo di eliminazione di Gauss consiste nel ridurre il sistema 2.130 al
seguente sistema, in modo da avere nulli tutti i termini, eccetto il primo della
prima colonna:
2.131
con:
2.132
2.133
La stessa operazione di eliminazione viene ora applicata alla matrice
del sistema ridotto:
2.134
e viene ripetuta ( n-1) volte sino a che la matrice ridotta ad una
matrice di ordine (1 x 1).
Da notare che la matrice dei coefcienti del sistema ridotto 2.126 ancora una
matrice simmetrica, quindi tutti gli elementi al di sopra della diagonale princi-
pale, questa inclusa, forniscono gli elementi della matrice ad ogni passo della
soluzione.
Si vedr anche che durante il processo di soluzione la semiampiezza di banda B
viene conservata e che il processo di triangolarizzazione coinvolge solo gli ele-
menti entro la banda della matrice. Si pu trarre un notevole vantaggio da queste
caratteristiche: se n il numero di equazioni del sistema, il numero delle opera-
zioni da eseguire per la soluzione del sistema si riduce da un fattore proporzio-
nale a n
3
, nel caso si consideri la matrice completa, ad un fattore proporzionale a
nB
2
/2, nel caso si tenga conto della simmetria e della struttura a banda della
matrice.
K
11
[ ] K
12
[ ]
K
21
[ ] K
22
[ ]
S
1
{ }
S
2
{ }
F
1
{ }
F
2
{ }
=
K
11
[ ] K
12
[ ]
0 [ ] K
1
[ ]
*
S
1
{ }
S
2
{ }
F
1
{ }
F
1
{ }
*
=
K
1
[ ]
*
K
22
[ ] K
21
[ ] K
11
[ ]
1
K
12
[ ] =
F
1
{ }
*
F
2
{ } K
21
[ ] K
11
[ ]
1
F
1
{ } =
K
1
[ ]
*
K
1
[ ]
*
S
2
{ } F
1
{ }
*
=
K
22
[ ]
CARATTERIZZAZIONE DELLA STRUTTURA
85
inoltre da notare la possibilit di trattare pi casi di carico senza per questo
ricorrere ad una nuova triangolarizzazione della matrice di rigidezza [K ], fase
questa che di gran lunga la pi lunga e laboriosa della soluzione del sistema di
equazioni. Dalla 2.126 si ha infatti che al primo passo di triangolarizzazione, la
riduzione del vettore dei termini noti richiede la conoscenza del coefciente sulla
diagonale principale K
11
e dei coefcienti della prima riga della matrice di rigi-
dezza; al secondo passo di triangolarizzazione si richiede la conoscenza dei coef-
cienti, gi modicati, della seconda riga della matrice di rigidezza; in modo
simile si procede per i successivi passi di triangolarizzazione. Il vettore { F } pu
quindi essere ridotto a partire dai coefcienti della matrice [K ] ridotta.
ESEMPIO 2.15
Calcolare gli spostamenti della struttura illustrata in gura 2.24, costituita da
tre barre collegate in serie, caricata in corrispondenza del nodo 2 e vincolata
in corrispondenza del nodo 1.
Fig. 2.24 Struttura con tre elementi asta.
Il sistema di equazioni associato alla struttura in esame, con i parametri indi-
cati in gura 2.24, il seguente:
2.135
L'unica condizione al contorno in termini cinematici data da ; si
considerer quindi solo il sistema di tre equazioni nelle tre incognite
, ottenuto eliminando formalmente la prima riga e la prima
colonna della matrice di rigidezza e la prima riga del vettore degli sposta-
menti e del vettore delle forze in 2.135:
2.136
1 1 0 0
1 2 1 0
0 1 2 1
0 0 1 1
U
1
U
2
U
3
U
4
F
1
1
0
0
=
U
1
0 =
U
2
U
3
U
4
, ,
2 1 0
1 2 1
0 1 1
U
2
U
3
U
4
1
0
0
=
CARATTERIZZAZIONE DELLA STRUTTURA
86
Volendo utilizzare il metodo di Gauss si procede nel seguente modo:
a. si sottrae 1/2 volte la prima riga dalla seconda:
2.137
b. si sottrae 2/3 volte la seconda riga dalla terza:
2.138
Conclusa la fase di triangolarizzazione, si risolve per le incognite :
2.139
da osservare che, al passo i-esimo sia della fase di triangolarizzazione sia della
fase di sostituzione, l'elemento sulla diagonale principale deve essere diverso da
zero. La matrice di rigidezza di una struttura in effetti denita positiva e lo
rimane ad ogni passo i-esimo del processo di triangolarizzazione, perch ci cor-
risponde a ricavare la matrice di rigidezza di una struttura in cui sia stato elimi-
nato l'i-esimo grado di libert.
Se ci non avviene vuol dire che la matrice di partenza non era denita positiva,
cio che non erano stati eliminati tutti i gradi di libert di moto rigido.
2 1 0
0
3
2
--- 1
0 1 1
U
2
U
3
U
4
1
1
2
---
0
=
2 1 0
0
3
2
--- 1
0 0
1
3
---
U
2
U
3
U
4
1
1
2
---
1
3
---
=
U
4
U
3
U
2
, ,
U
4
1 3
1 3
---------- 1 = =
U
3
U
4
1 2 +
3 2
-----------------------
1 1 2 +
3 2
------------------- 1 = = =
U
2
U
3
1 +
2
----------------
1 1 +
2
------------ 1 = = =
CARATTERIZZAZIONE DELLA STRUTTURA
87
ESEMPIO 2.16
Calcolare gli spostamenti della struttura di gura 2.25, identica a quella illu-
strata in gura 2.24, ma con un grado di libert in meno, quello corrispon-
dente al nodo 2.
Fig. 2.25 Struttura con due elementi asta.
La notazione di rigidezza della struttura :
2.140
dopo aver imposto le condizioni al contorno ( ), il sistema risolutivo
risulta:
2.141
coincidente con quello ottenuto dopo il primo passo di triangolarizzazione del
sistema 2.137 associato alla struttura di gura 2.24.
Calcolare, inne, gli spostamenti della struttura indicata in gura 2.26 in cui i
nodi 2 e 3 sono stati soppressi, eliminando quindi i gradi di libert e .
Fig. 2.26 Struttura con un elemento asta.
1
2
---
1
2
--- 0
1
2
---
3
2
--- 1
0 1 1
U
1
U
3
U
4
1
2
---
1
2
---
0
=
U
1
0 =
3
2
--- 1
1 1
U
3
U
4
1
2
---
0
=
U
2
U
3
CARATTERIZZAZIONE DELLA STRUTTURA
88
La notazione di rigidezza per la struttura di gura 2.26 :
2.142
Dopo aver imposto le condizioni di vincolo, si ha:
2.143
equazione che coincide con quella ottenuta dopo il secondo passo di triango-
larizzazione del sistema 2.138 associato alla struttura di gura 2.24.
ora possibile dimostrare perch, durante il processo di triangolarizzazione,
tutti gli elementi sulla diagonale principale della matrice di rigidezza devono
rimanere positivi.
Il sistema di eliminazione di Gauss corrisponde quindi a sopprimere, al passo
i-esimo, l'i-esimo grado di libert della struttura ed a determinare la matrice di
rigidezza ed il vettore dei carichi nodali relativi alla nuova congurazione della
struttura, cio con (n - i) gradi di libert.
L'i-esimo elemento sulla diagonale non altro che il coefciente di rigidezza
relativo all'i-esimo grado di libert quando i primi (i - 1) gradi di libert sono
stati soppressi, e tale coefciente deve essere positivo. Se, durante il processo di
eliminazione, uno dei coefcienti sulla diagonale principale risulta uguale a zero
(o addirittura minore, a causa degli arrotondamenti numerici), ci signica che
la struttura labile.
ESEMPIO 2.17
Calcolare gli spostamenti per la struttura illustrata in gura 2.27.
Fig. 2.27 Struttura labile.
1
3
---
1
3
---
1
3
---
1
3
---
U
1
U
4
2
3
---
1
3
---
=
1
3
---U
4
1
3
--- =
CARATTERIZZAZIONE DELLA STRUTTURA
89
La notazione di rigidezza, con i parametri indicati in gura 2.27, la
seguente:
2.144
Applicando le condizioni di vincolo ( ), si ottiene:
2.145
Eseguendo il primo passo di triangolarizzazione si ottiene:
2.146
ed al secondo passo:
2.147
Si ottenuto un elemento nullo sulla diagonale principale in corrispondenza
della terza equazione; ci sta a signicare che la struttura considerata labile
ed in particolare che non stato vincolato il grado di libert di moto rigido
alla rotazione.
12 6 12 6
6 4 6 2
12 6 12 6
6 2 6 4
V
1
A
1
V
2
A
2
F
1
0
0
1
=
V
1
0 =
4 6 2
6 12 6
2 6 4
A
1
V
2
A
2
0
0
1
=
4 6 2
0 3 3
0 3 3
A
1
V
2
A
2
0
0
1
=
4 6 2
0 3 3
0 0 0
A
1
V
2
A
2
0
0
1
=
Potrebbero piacerti anche
- Manuale Sap2000Documento37 pagineManuale Sap2000napolegnoNessuna valutazione finora
- (Ebook-Norme) UNI en ISO 12944-4 (2001) Pitture Vernici. Protezione Corrosione Strutture Acciaio Verniciatura. Tipi Superficie PreparazioneDocumento29 pagine(Ebook-Norme) UNI en ISO 12944-4 (2001) Pitture Vernici. Protezione Corrosione Strutture Acciaio Verniciatura. Tipi Superficie PreparazionesinetemporeNessuna valutazione finora
- EC3Documento132 pagineEC3FedericoNessuna valutazione finora
- Esercitazioni Dal Corso Di Meccanica Delle VibrazioniDocumento120 pagineEsercitazioni Dal Corso Di Meccanica Delle VibrazioniAlfredo PatriziNessuna valutazione finora
- Elementi IsoparametriciDocumento35 pagineElementi IsoparametricivincemugnaioNessuna valutazione finora
- Isolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataDocumento137 pagineIsolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataStefano FolladorNessuna valutazione finora
- SDC Parte 5 FDocumento85 pagineSDC Parte 5 Fbosnia76100% (1)
- Indice 147 PDFDocumento53 pagineIndice 147 PDFMaurizio VellaNessuna valutazione finora
- Introduzione Al Metodo Degli Elementi FinitiDocumento12 pagineIntroduzione Al Metodo Degli Elementi FinitichedelusioneNessuna valutazione finora
- Elementi FinitiDocumento76 pagineElementi FinitiMa RcoNessuna valutazione finora
- Ingegneria Civile Uniroma3 - III Anno - Tesi Triennale Di Mattia Campolese - Calcolo Travature Reticolari in Ambiente Matlab - Uniroma3Documento94 pagineIngegneria Civile Uniroma3 - III Anno - Tesi Triennale Di Mattia Campolese - Calcolo Travature Reticolari in Ambiente Matlab - Uniroma3EdomrgNessuna valutazione finora
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Elementi Finiti Parte 2Documento50 pagineElementi Finiti Parte 2alermsNessuna valutazione finora
- Elementi Finiti Parte 3Documento105 pagineElementi Finiti Parte 3alerms100% (1)
- Massa Modale EffettivaDocumento7 pagineMassa Modale EffettivaFederica Di LupoNessuna valutazione finora
- Appunti FEMDocumento49 pagineAppunti FEMCiccio D'ErchiaNessuna valutazione finora
- Considerazioni Sull'AlluminioDocumento10 pagineConsiderazioni Sull'AlluminiodosocadNessuna valutazione finora
- Brillantatura AlluminioDocumento5 pagineBrillantatura AlluminioWilliam FratoniNessuna valutazione finora
- 3-Calcolo Stati LimiteDocumento291 pagine3-Calcolo Stati LimiteAnonymous BuSK1dXYNessuna valutazione finora
- Ingegneria Del Vento (ICISP)Documento158 pagineIngegneria Del Vento (ICISP)Gothama_GENessuna valutazione finora
- FemDocumento154 pagineFemGiovanniCuocoNessuna valutazione finora
- Guida Sap-2000Documento55 pagineGuida Sap-2000viciuzzoNessuna valutazione finora
- Appunti Fatica PDFDocumento94 pagineAppunti Fatica PDFperosuttoneNessuna valutazione finora
- SDC Parte 5 CDocumento85 pagineSDC Parte 5 CLeotta GianfrancoNessuna valutazione finora
- APPUNTI Meccanica Della Frattura 2019 - Prima ParteDocumento40 pagineAPPUNTI Meccanica Della Frattura 2019 - Prima ParteCRISTIAN MONTESANONessuna valutazione finora
- Quaderno 2 PDFDocumento47 pagineQuaderno 2 PDFGianluca de RisiNessuna valutazione finora
- (C. A. Brebbia, J. J. Connor) Fondamenti Del Metod (BookFi)Documento122 pagine(C. A. Brebbia, J. J. Connor) Fondamenti Del Metod (BookFi)Giulio PalamàNessuna valutazione finora
- Analisi Increment Ale Di Strutture Elasto-PlasticheDocumento40 pagineAnalisi Increment Ale Di Strutture Elasto-PlastichePalazzoloFilippoNessuna valutazione finora
- Introduzione Al Metodo Degli Elementi FinitiDocumento22 pagineIntroduzione Al Metodo Degli Elementi FinitiChristos TsaropoulosNessuna valutazione finora
- (Ebook-Norme) UNI en ISO 12944-7 (2001) Pitture Vernici. Protezione Corrosione Strutture Acciaio Verniciatura. Esecuzione Sorveglianza Lavori VerniciaturaDocumento17 pagine(Ebook-Norme) UNI en ISO 12944-7 (2001) Pitture Vernici. Protezione Corrosione Strutture Acciaio Verniciatura. Esecuzione Sorveglianza Lavori VerniciaturasinetemporeNessuna valutazione finora
- Esercitazione NTC Laboratorio Di Costruzioni 2 Prof - Mario de StefanoDocumento59 pagineEsercitazione NTC Laboratorio Di Costruzioni 2 Prof - Mario de Stefanoroberto_romano8870Nessuna valutazione finora
- Ceravolo - Strutture in Acciaio E in Cemento Armato PDFDocumento182 pagineCeravolo - Strutture in Acciaio E in Cemento Armato PDFValerio MastroianniNessuna valutazione finora
- Esercitazione LastraforataDocumento36 pagineEsercitazione LastraforataFrancesco Di MiccoNessuna valutazione finora
- Uni 12944-2 PDFDocumento17 pagineUni 12944-2 PDFPaolo Bertolli100% (1)
- Analisi Modale SperimentaleDocumento6 pagineAnalisi Modale Sperimentaleedge_88Nessuna valutazione finora
- Pro SapDocumento708 paginePro SapStefano Squadrani100% (1)
- Relazione Strutturale Scala in Acciaio PDFDocumento97 pagineRelazione Strutturale Scala in Acciaio PDFgabrieleNessuna valutazione finora
- R01 Analisi Cinematica GraficaDocumento6 pagineR01 Analisi Cinematica GraficaAnonimoNessuna valutazione finora
- Il Metodo Degli Elementi FinitiDocumento41 pagineIl Metodo Degli Elementi FinitiD RashNessuna valutazione finora
- Plasticità Concentrata-DiffusaDocumento125 paginePlasticità Concentrata-DiffusaGiorgio Pinzari100% (1)
- TutoredEttaGliaTo SAP 2000 TUTORIAL BY CSIDocumento145 pagineTutoredEttaGliaTo SAP 2000 TUTORIAL BY CSIAndreaAlberoNessuna valutazione finora
- Interazioni Fondamentali, Gravità e StringheDocumento120 pagineInterazioni Fondamentali, Gravità e StringheAntonio LatorreNessuna valutazione finora
- Analisi Dei Carichi 1Documento41 pagineAnalisi Dei Carichi 1Anonymous kVDFWvNessuna valutazione finora
- Appunti Su Solaio in CLSDocumento16 pagineAppunti Su Solaio in CLSIlenia Raperonzolo GabrieleNessuna valutazione finora
- Guida SolidworksDocumento27 pagineGuida SolidworksfrancoNessuna valutazione finora
- Travi CurveDocumento4 pagineTravi CurvePippo FrancoNessuna valutazione finora
- Analisi FEMDocumento19 pagineAnalisi FEMmaurizio_naddeo3601Nessuna valutazione finora
- 10024-86 CNR Calcolo Con Elaboratore PDFDocumento11 pagine10024-86 CNR Calcolo Con Elaboratore PDF1960skyNessuna valutazione finora
- Analisi Modale Con Sap2000Documento17 pagineAnalisi Modale Con Sap2000EnriPatNessuna valutazione finora
- Esercitazione Ingegneria Del Vento (Tommaso Ballantini)Documento50 pagineEsercitazione Ingegneria Del Vento (Tommaso Ballantini)Tommaso BallantiniNessuna valutazione finora
- Geotechnical FEM Analysis SystemDocumento126 pagineGeotechnical FEM Analysis SystemUte EnteNessuna valutazione finora
- Tipi Di AnalisiDocumento72 pagineTipi Di AnalisiMarco AmorosoNessuna valutazione finora
- Progetto Comsol GuerraDocumento32 pagineProgetto Comsol GuerraGabriele GuerraNessuna valutazione finora
- Progettazione Di Elementi in CADocumento136 pagineProgettazione Di Elementi in CAAmer ShaabanNessuna valutazione finora
- Progettazione Di Elementi in CADocumento122 pagineProgettazione Di Elementi in CAAlessandro PerroneNessuna valutazione finora
- 08 CorrettoDocumento72 pagine08 CorrettoGiuseppe BorgeseNessuna valutazione finora
- Tesi Savio 1034856Documento109 pagineTesi Savio 1034856olomoloNessuna valutazione finora
- Relazione Di Laboratorio Di Tecnica Delle CostruzioniDocumento46 pagineRelazione Di Laboratorio Di Tecnica Delle CostruzioniDannazione67% (3)
- 07 Calcolo Automatico Delle StruttureDocumento20 pagine07 Calcolo Automatico Delle Strutturedonato770Nessuna valutazione finora
- Verifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPDa EverandVerifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPNessuna valutazione finora