Potrebbero piacerti anche
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Diagnostica 7Documento14 pagineDiagnostica 7st_luiseNessuna valutazione finora
- Costruzioni 14Documento16 pagineCostruzioni 14PaoloCherchiNessuna valutazione finora
- Guasti Negli Avvolgimenti Di Statore (1 Parte)Documento52 pagineGuasti Negli Avvolgimenti Di Statore (1 Parte)gausgausNessuna valutazione finora
- Impedenza Dinamica RotoreDocumento11 pagineImpedenza Dinamica Rotorediego.simioni.83Nessuna valutazione finora
- 04 Motori CC CollettoreDocumento47 pagine04 Motori CC Collettorealepiemo13Nessuna valutazione finora
- FMM Al TraferroDocumento8 pagineFMM Al TraferroNunzioBestNessuna valutazione finora
- Diagnostica Delle Macchine Rotanti 1Documento13 pagineDiagnostica Delle Macchine Rotanti 1Luigi BennardoNessuna valutazione finora
- Diagnostica 3Documento13 pagineDiagnostica 3st_luiseNessuna valutazione finora
- Diagnostica Delle Macchine Rotanti 2Documento12 pagineDiagnostica Delle Macchine Rotanti 2Luigi BennardoNessuna valutazione finora
- Diagnostica 11ADocumento9 pagineDiagnostica 11Ast_luiseNessuna valutazione finora
- DifferenzialeDocumento15 pagineDifferenzialealessio8Nessuna valutazione finora
- Diagnostica 4Documento13 pagineDiagnostica 4st_luiseNessuna valutazione finora
- 19 - Unioni SaldateDocumento19 pagine19 - Unioni SaldateFavalessaNessuna valutazione finora
- Dispensa 5 - CollegamentiDocumento93 pagineDispensa 5 - CollegamentiGiant666Nessuna valutazione finora
- 00 Merged ChaptersDocumento677 pagine00 Merged ChaptersfrinfoNessuna valutazione finora
- 2 Difetti e Dislocazioni 1Documento28 pagine2 Difetti e Dislocazioni 1Simone CosmaNessuna valutazione finora
- Transistor 0607Documento32 pagineTransistor 0607Filip FurduiNessuna valutazione finora
- Diagnostica 12Documento12 pagineDiagnostica 12st_luiseNessuna valutazione finora
- Trasformatore MioDocumento22 pagineTrasformatore Mionestor.escala7666Nessuna valutazione finora
- Lezioni IntroduttiveDocumento111 pagineLezioni IntroduttiveKatrim ChicaizaNessuna valutazione finora
- T09 BJTDocumento36 pagineT09 BJTRaffaele PiccinnoNessuna valutazione finora
- 10-bjtDocumento29 pagine10-bjtcryptotab473Nessuna valutazione finora
- Diagnostica 5 PDFDocumento18 pagineDiagnostica 5 PDFnz578427Nessuna valutazione finora
- Campomagnetico 2Documento11 pagineCampomagnetico 2Mariachiara FerraraNessuna valutazione finora
- Componenti ElettronicaDocumento20 pagineComponenti Elettronical.giordano.3128Nessuna valutazione finora
- Beginners BJTDocumento59 pagineBeginners BJTAmedeo_De_SetaNessuna valutazione finora
- Transistor A Giunzione Bipolare - WikipediaDocumento10 pagineTransistor A Giunzione Bipolare - WikipediageoitalyNessuna valutazione finora
- Lezione 17 19 Induzione Magnetica e Circuiti RLDocumento67 pagineLezione 17 19 Induzione Magnetica e Circuiti RLBradyty 11Nessuna valutazione finora
- Magnetismo InduzioneDocumento27 pagineMagnetismo InduzioneVincenzo PireddaNessuna valutazione finora
- CFP - Moment Resisting Joints - Rev - 02Documento90 pagineCFP - Moment Resisting Joints - Rev - 02st_luiseNessuna valutazione finora
- BoxdinrDocumento2 pagineBoxdinrSofianeNessuna valutazione finora
- 1 DisDocumento26 pagine1 DisAndrea CozzolinoNessuna valutazione finora
- Informe 7Documento8 pagineInforme 7Carlos Kstillo100% (1)
- Motore in Corrente ContinuaDocumento14 pagineMotore in Corrente ContinuaJoker34100% (1)
- Costruzioni 9Documento14 pagineCostruzioni 9PaoloCherchiNessuna valutazione finora
- Beginners BJTDocumento82 pagineBeginners BJTFabio Di RadoNessuna valutazione finora
- AlternatoreDocumento48 pagineAlternatoresteinman1Nessuna valutazione finora
- Verifiche 3Documento41 pagineVerifiche 3Pier Luigi GroppoNessuna valutazione finora
- Eserciziario ElettrotecnicaDocumento127 pagineEserciziario Elettrotecnicajoe zoroNessuna valutazione finora
- 3 - Tensione e Deformazione - Sforzo Normale - Parte1Documento50 pagine3 - Tensione e Deformazione - Sforzo Normale - Parte1DanielParadiseNessuna valutazione finora
- Lezione 3Documento30 pagineLezione 3Gerardo LauroNessuna valutazione finora
- Dossier 4Documento18 pagineDossier 4Andrea AtzeniNessuna valutazione finora
- La Connessione InduttivaDocumento4 pagineLa Connessione InduttivaFrancesco FonteNessuna valutazione finora
- Costruzioni 3Documento16 pagineCostruzioni 3PaoloCherchiNessuna valutazione finora
- Manuale Installazione Daikin r32 Parte 5Documento4 pagineManuale Installazione Daikin r32 Parte 5giovanni urciuoliNessuna valutazione finora
- II Compito II QuadrDocumento4 pagineII Compito II QuadrValerioNessuna valutazione finora
- Costruzioni 10Documento8 pagineCostruzioni 10PaoloCherchiNessuna valutazione finora
- Capitolo IV - Apparecchi Di Manovra e Rele'Documento46 pagineCapitolo IV - Apparecchi Di Manovra e Rele'Nicola D'AngeloNessuna valutazione finora
- Rke+5 2012Documento84 pagineRke+5 2012Mariano Cabrales LabastidasNessuna valutazione finora
- Cemento Armato 7 - Torsione (Rossi)Documento36 pagineCemento Armato 7 - Torsione (Rossi)Matteo MessinaNessuna valutazione finora
- TrasformatoriDocumento39 pagineTrasformatoriGraziana SchillaciNessuna valutazione finora
- Condens. e InduttoreDocumento48 pagineCondens. e InduttoreclapaeriNessuna valutazione finora
- Diagnosi Motori ElettriciDocumento13 pagineDiagnosi Motori ElettriciDino PedutoNessuna valutazione finora
- Costruzioni 15Documento10 pagineCostruzioni 15PaoloCherchiNessuna valutazione finora
- Induzione Elettromagnetica - Pizzardini AntoniaDocumento10 pagineInduzione Elettromagnetica - Pizzardini Antoniaantonia_maddalenaNessuna valutazione finora
- Prof. Barcaglioni - Impianti Elettrici-4Documento9 pagineProf. Barcaglioni - Impianti Elettrici-4mbNessuna valutazione finora
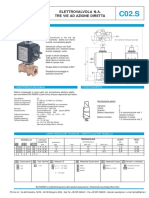
- Elettrovalvola N.A. Tre Vie Ad Azione Diretta: DescrizioneDocumento1 paginaElettrovalvola N.A. Tre Vie Ad Azione Diretta: DescrizioneOscar Ponce de leon AlmanzaNessuna valutazione finora
- Royer pdf2Documento17 pagineRoyer pdf2sergio delucaNessuna valutazione finora
- Atlante Stradale Moto 47 Chioggia ComacchioDocumento1 paginaAtlante Stradale Moto 47 Chioggia Comacchiost_luiseNessuna valutazione finora
- Veneto, Venezia, La Laguna e Le Altre Isole (Bell'Italia 2012-05)Documento12 pagineVeneto, Venezia, La Laguna e Le Altre Isole (Bell'Italia 2012-05)st_luiseNessuna valutazione finora
- Progetto Di Una Coppia Di Ruote DentateDocumento5 pagineProgetto Di Una Coppia Di Ruote Dentatest_luiseNessuna valutazione finora
- Costruzioni 23Documento11 pagineCostruzioni 23st_luiseNessuna valutazione finora
- Diagnostica 9Documento16 pagineDiagnostica 9st_luiseNessuna valutazione finora
- Nuova Direttiva Macchine, Innovazioni E Problematiche ApplicativeDocumento25 pagineNuova Direttiva Macchine, Innovazioni E Problematiche Applicativest_luiseNessuna valutazione finora
- Diagnostica 4Documento13 pagineDiagnostica 4st_luiseNessuna valutazione finora
- Diagnostica 5Documento19 pagineDiagnostica 5st_luiseNessuna valutazione finora
- UNI 7670 1988 Meccanismi Per Apparecchi Di Sollevamento - Istruzioni Per Il CalcoloDocumento26 pagineUNI 7670 1988 Meccanismi Per Apparecchi Di Sollevamento - Istruzioni Per Il CalcoloGj100% (4)
- Diagnostica 11ADocumento9 pagineDiagnostica 11Ast_luiseNessuna valutazione finora
- Materiali Non MetalliciDocumento2 pagineMateriali Non Metallicist_luiseNessuna valutazione finora
- Mindfulness Consigli Di LetturaDocumento5 pagineMindfulness Consigli Di Letturast_luiseNessuna valutazione finora
- Materiali Non MetalliciDocumento2 pagineMateriali Non Metallicist_luiseNessuna valutazione finora
- Costruzioni 6bDocumento3 pagineCostruzioni 6bst_luiseNessuna valutazione finora
- Costruzioni 6aDocumento7 pagineCostruzioni 6ast_luiseNessuna valutazione finora
- ST Tape-ICE-00 ItDocumento1 paginaST Tape-ICE-00 Itst_luiseNessuna valutazione finora
- Tefal VS400334 Vitacuisine Compact Steam Cooker - ITDocumento13 pagineTefal VS400334 Vitacuisine Compact Steam Cooker - ITst_luiseNessuna valutazione finora
- 10-11-17-18 MediaDocumento1 pagina10-11-17-18 Mediast_luiseNessuna valutazione finora
- Normative Uni enDocumento13 pagineNormative Uni enZizuNessuna valutazione finora
- Locandina TRATTAMENTIDocumento1 paginaLocandina TRATTAMENTIst_luiseNessuna valutazione finora
- Multi Purpose Doors Proget - It PDFDocumento86 pagineMulti Purpose Doors Proget - It PDFst_luiseNessuna valutazione finora
- CFP - Moment Resisting Joints - Rev - 02Documento90 pagineCFP - Moment Resisting Joints - Rev - 02st_luiseNessuna valutazione finora
- Acciaio PROGETTAZIONE PRESTAZIONALE ANTISIMICA PDFDocumento140 pagineAcciaio PROGETTAZIONE PRESTAZIONALE ANTISIMICA PDFjkklflNessuna valutazione finora
- Scheda Iscrizione 345TECDocumento1 paginaScheda Iscrizione 345TECst_luiseNessuna valutazione finora
- OKEO TECHNICAL Fw2018-19-AswimmingwpDocumento21 pagineOKEO TECHNICAL Fw2018-19-Aswimmingwpst_luiseNessuna valutazione finora
- Manuale Ab 450Documento54 pagineManuale Ab 450st_luise100% (1)
- Type SDocumento79 pagineType Sst_luiseNessuna valutazione finora
- Lean Visual Management V5 PDFDocumento364 pagineLean Visual Management V5 PDFst_luiseNessuna valutazione finora
- BulloniDocumento11 pagineBulloniFabioNessuna valutazione finora