Potrebbero piacerti anche
- Altri Problemi Su Ellisse e IperboleDocumento1 paginaAltri Problemi Su Ellisse e Iperbolesilgreg70Nessuna valutazione finora
- Equazioni Figure PianeDocumento5 pagineEquazioni Figure PianemakaNessuna valutazione finora
- Prova Scritta Di Geometria Corso Di Laurea in Ingegneria Informatica 25 Maggio 2018Documento3 pagineProva Scritta Di Geometria Corso Di Laurea in Ingegneria Informatica 25 Maggio 2018EdoardoNessuna valutazione finora
- Scritto Compito 20-6-2019Documento8 pagineScritto Compito 20-6-2019annaNessuna valutazione finora
- Esercitazione Prove D'esameDocumento10 pagineEsercitazione Prove D'esameMatheus PadilhaNessuna valutazione finora
- ALIN PAP Prep Test1 2022Documento3 pagineALIN PAP Prep Test1 2022Marco GiammitoNessuna valutazione finora
- Verifica ParabolaDocumento1 paginaVerifica ParabolaVoglio100% (1)
- Fondamenti Di Algebra Lineare E GeometriaDocumento2 pagineFondamenti Di Algebra Lineare E GeometriaMarco MatteazziNessuna valutazione finora
- Coordinate PolariDocumento9 pagineCoordinate PolariAlfonso BelfioreNessuna valutazione finora
- Esamitesti SoluzioniDocumento318 pagineEsamitesti Soluzioniarianna_marsicoNessuna valutazione finora
- SIMULAZIONE Verifica Circonferenza SCIENTIFICODocumento1 paginaSIMULAZIONE Verifica Circonferenza SCIENTIFICOwork workNessuna valutazione finora
- SG 2019 - Prova MatematicaDocumento2 pagineSG 2019 - Prova MatematicaSabrina CeppiNessuna valutazione finora
- ESERCIZI FISICA 2 - P DI SIA (06dic17) PDFDocumento38 pagineESERCIZI FISICA 2 - P DI SIA (06dic17) PDFambaNessuna valutazione finora
- Luoghi Geometrici e Trasformazioni Nella Geometria AnliticaDocumento1 paginaLuoghi Geometrici e Trasformazioni Nella Geometria AnliticaVoglio10Nessuna valutazione finora
- Alg Lin 27 9 2022Documento2 pagineAlg Lin 27 9 2022cifolettiadinaNessuna valutazione finora
- Campo Magnetico Di Una Spira CircolareDocumento4 pagineCampo Magnetico Di Una Spira CircolareStefano FortiniNessuna valutazione finora
- Mat6 PDFDocumento1 paginaMat6 PDFPaolo BartesaghiNessuna valutazione finora
- Ecampus 7Documento2 pagineEcampus 7arianna_marsicoNessuna valutazione finora
- Esercizi Parabola 1xDocumento4 pagineEsercizi Parabola 1xYara ElfayoumyNessuna valutazione finora
- O Goniometria 0304 PDocumento2 pagineO Goniometria 0304 Pbic3tt4Nessuna valutazione finora
- 2021b 2EP Matematica LSDocumento6 pagine2021b 2EP Matematica LSLev TolstòjNessuna valutazione finora
- Scap 2Documento32 pagineScap 2danNessuna valutazione finora
- Esame Di Stato - Matematica 2008Documento2 pagineEsame Di Stato - Matematica 2008Montanari LucaNessuna valutazione finora
- Esercizi Fisica 2Documento4 pagineEsercizi Fisica 2FilippoNessuna valutazione finora
- Retta Circonferenza ParabolaDocumento1 paginaRetta Circonferenza ParabolaVoglio10Nessuna valutazione finora
- 1.il Campo Ordinato Completo R Dei Numeri RealiDocumento18 pagine1.il Campo Ordinato Completo R Dei Numeri Realifluffa23Nessuna valutazione finora
- Scritto Compito Ottobre 2019Documento7 pagineScritto Compito Ottobre 2019annaNessuna valutazione finora
- Cuaderno Ital 15Documento24 pagineCuaderno Ital 15Ruben Serna CNessuna valutazione finora
- ORDINAMENTODocumento52 pagineORDINAMENTOGiacomo DragoNessuna valutazione finora
- Elce-Curve ParametricheDocumento6 pagineElce-Curve ParametricheJose DasseNessuna valutazione finora
- Retta Piano Cartesiano PDFDocumento1 paginaRetta Piano Cartesiano PDFPaolo LeonelliNessuna valutazione finora
- Retta Piano Cartesiano PDFDocumento1 paginaRetta Piano Cartesiano PDFPaolo LeonelliNessuna valutazione finora
- Esame 2Documento2 pagineEsame 2pincoNessuna valutazione finora
- 2008-LS Pni SuppDocumento18 pagine2008-LS Pni SuppalbertoalbertoalbertNessuna valutazione finora
- Problemi Esame 3 Con Soluzione 2019 - Lorenzo Roi, 2020Documento51 pagineProblemi Esame 3 Con Soluzione 2019 - Lorenzo Roi, 2020Tandhi_WahyonoNessuna valutazione finora
- Scritto Geometria Informatica 11settembre2019Documento6 pagineScritto Geometria Informatica 11settembre2019TerryNessuna valutazione finora
- Esame 5Documento3 pagineEsame 5Francesco CamposarcunoNessuna valutazione finora
- 2018o SolzDocumento23 pagine2018o SolzGiacomo DragoNessuna valutazione finora
- Elecdyn Note3Documento6 pagineElecdyn Note3Dora McNessuna valutazione finora
- Conichemodificate 2Documento2 pagineConichemodificate 2g.iaculloNessuna valutazione finora
- Quesiti GeometriaDocumento4 pagineQuesiti GeometriaAnonymous TeoiHmqTZNessuna valutazione finora
- Lorenzo Brasco: N A N NDocumento3 pagineLorenzo Brasco: N A N NKancelari GjiniNessuna valutazione finora
- Scritto 27-06-2022 SoluzioniDocumento3 pagineScritto 27-06-2022 SoluzioniFilippoNessuna valutazione finora
- Lezione 23 NovembreDocumento11 pagineLezione 23 Novembrerizzidomenico31Nessuna valutazione finora
- ConicheDocumento2 pagineConichecataldocataldoNessuna valutazione finora
- hw2021 03Documento1 paginahw2021 03Stefano PeaNessuna valutazione finora
- Y557 - Esame Di Stato Di Liceo Scientifico: Piano Nazionale Informatica Tema Di: MatematicaDocumento48 pagineY557 - Esame Di Stato Di Liceo Scientifico: Piano Nazionale Informatica Tema Di: MatematicaGiacomo DragoNessuna valutazione finora
- Scritto Geometria Informatica 14gennaio2020Documento5 pagineScritto Geometria Informatica 14gennaio2020TerryNessuna valutazione finora
- 2008-LS - Ord Supp PDFDocumento17 pagine2008-LS - Ord Supp PDFSabato CampanileNessuna valutazione finora
- Le ConicheDocumento14 pagineLe ConicheAngelo Curti CanettiNessuna valutazione finora
- Ferrari Lezione16Documento19 pagineFerrari Lezione16ViolaNessuna valutazione finora
- A R Circonferenza IperboleDocumento18 pagineA R Circonferenza IperboleFabio IngrassiaNessuna valutazione finora
- Appunti Di GeometriaDocumento218 pagineAppunti Di GeometriaArthur SmithNessuna valutazione finora
- Tracce Esami Algebra e Geometria IngegneriaDocumento10 pagineTracce Esami Algebra e Geometria IngegneriaannaNessuna valutazione finora
- La Circonferenza Nel Piano CartesianoDocumento34 pagineLa Circonferenza Nel Piano CartesianorosagiuliaNessuna valutazione finora
- O Successioni 0203 QDocumento2 pagineO Successioni 0203 Qjarevir820Nessuna valutazione finora
- Fondamenti Di Algebra Lineare E GeometriaDocumento4 pagineFondamenti Di Algebra Lineare E GeometriaMarco MatteazziNessuna valutazione finora
- Ellisse IperboleDocumento24 pagineEllisse IperboleemilianoNessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- Esponenziale e LogaritmoDocumento130 pagineEsponenziale e Logaritmomatte63Nessuna valutazione finora
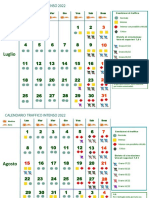
- Calendario Traffico Intenso 2022Documento2 pagineCalendario Traffico Intenso 2022matte63Nessuna valutazione finora
- Trasformate Di LaplaceDocumento88 pagineTrasformate Di Laplacematte63Nessuna valutazione finora
- Iperbole Tabella DefDocumento3 pagineIperbole Tabella Defmatte63Nessuna valutazione finora
- Direzioni e Momenti Principali D'inerziaDocumento1 paginaDirezioni e Momenti Principali D'inerziaMarco SulcisNessuna valutazione finora
- Movimenti Ginnico SportiviDocumento25 pagineMovimenti Ginnico Sportivigrass7stopNessuna valutazione finora
- Art de La Guerre - Traduzione Italiana - Versione 3Documento79 pagineArt de La Guerre - Traduzione Italiana - Versione 3pippobaudo100% (1)
- Beato Pier Giorgio Frassati - Stampa 4,1 - 2,3Documento4 pagineBeato Pier Giorgio Frassati - Stampa 4,1 - 2,3TreSacriCuori di Gesù, Maria e GiuseppeNessuna valutazione finora
- Riassunti Inferno Divina CommediDocumento18 pagineRiassunti Inferno Divina CommediPietro BologniniNessuna valutazione finora
- Cristal 10Documento17 pagineCristal 10Vale46 RossiNessuna valutazione finora
- Scheda Armi Sine RequieDocumento2 pagineScheda Armi Sine RequieDavy02100% (1)