Potrebbero piacerti anche
- Rilevatore di bordi astuto: Svelare l'arte della percezione visivaDa EverandRilevatore di bordi astuto: Svelare l'arte della percezione visivaNessuna valutazione finora
- Pulegge Scanalate Poly-V Per Bussola ConicaDocumento2 paginePulegge Scanalate Poly-V Per Bussola ConicaRacem LoukilNessuna valutazione finora
- Esercizio Sul Motore EndotermicoDocumento6 pagineEsercizio Sul Motore Endotermicodpiperis1118Nessuna valutazione finora
- Saldatura di circuiti elettronici: Guida per principianti e +Da EverandSaldatura di circuiti elettronici: Guida per principianti e +Nessuna valutazione finora
- 3004 2RSDocumento1 pagina3004 2RSLucaNessuna valutazione finora
- Esercizi 3Documento7 pagineEsercizi 3mirko.vituzzo97Nessuna valutazione finora
- Induttanza Antenne RaccorciateDocumento12 pagineInduttanza Antenne RaccorciatesparkflashNessuna valutazione finora
- Cinghia DentataDocumento10 pagineCinghia Dentatagiuseppe baldassarreNessuna valutazione finora
- RisoltoDocumento5 pagineRisoltoiaush.karimiNessuna valutazione finora
- Cuscinetti Radiali A Sfere-6406Documento1 paginaCuscinetti Radiali A Sfere-6406Emiddio PelosiNessuna valutazione finora
- Ingranaggi A Denti Dritti - TabellaDocumento5 pagineIngranaggi A Denti Dritti - TabellaMonica BoccaNessuna valutazione finora
- Valutazione Resistenza MagroneDocumento5 pagineValutazione Resistenza Magronegianmariasuergi4195Nessuna valutazione finora
- Esercitazione 10Documento6 pagineEsercitazione 10Riccardo SerenellaNessuna valutazione finora
- Relazione 1Documento18 pagineRelazione 1pexsot87100% (2)
- Tipo de Roscas 60059-60060-600114Documento6 pagineTipo de Roscas 60059-60060-600114Filipe BrandaoNessuna valutazione finora
- MVVblog ESR Meter DatasheetDocumento3 pagineMVVblog ESR Meter DatasheetKen FalcoNessuna valutazione finora
- Rue25 eDocumento3 pagineRue25 eLuca MemoliNessuna valutazione finora
- Calcolo Degli Ingranaggi Cilindrici. Calcolo Della Trasmissione Ad IngranaggiDocumento37 pagineCalcolo Degli Ingranaggi Cilindrici. Calcolo Della Trasmissione Ad IngranaggimgualdiNessuna valutazione finora
- Calcolo Trasformatore Monofase (Volpi)Documento5 pagineCalcolo Trasformatore Monofase (Volpi)Vincenzo TagliaviaNessuna valutazione finora
- Calcolo Trasformatore Monofase (Volpi)Documento5 pagineCalcolo Trasformatore Monofase (Volpi)theswingineerNessuna valutazione finora
- HVAC Linea Gas Uni 7129 090914Documento11 pagineHVAC Linea Gas Uni 7129 090914Anonymous lTEzOZk2KNessuna valutazione finora
- MVVblog Esr Meter DatasheetDocumento3 pagineMVVblog Esr Meter DatasheetDaniel ZeballosNessuna valutazione finora
- MVVblog ESR Meter DatasheetDocumento3 pagineMVVblog ESR Meter DatasheetDaniel ZeballosNessuna valutazione finora
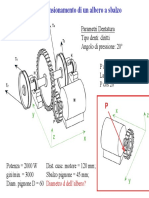
- Dimensionamento Di Un Albero A SbalzoDocumento4 pagineDimensionamento Di Un Albero A SbalzoSHERIF ZAHERNessuna valutazione finora
- Shipping Saddle For Horizontal Pressure Vessels - v08 - 2Documento1 paginaShipping Saddle For Horizontal Pressure Vessels - v08 - 2gbscribd73Nessuna valutazione finora
- Produzeni UreznikDocumento3 pagineProduzeni Ureznikfiftyone01Nessuna valutazione finora
- Amply EL34PP 35wDocumento15 pagineAmply EL34PP 35wdisse_detiNessuna valutazione finora
- Verbale Controllo Funi Ad Anello e AlaggioDocumento2 pagineVerbale Controllo Funi Ad Anello e AlaggioAgnichandra SubediNessuna valutazione finora
- 44 Cinghie Trapezoidali Manuale TecnicoDocumento23 pagine44 Cinghie Trapezoidali Manuale TecnicoRoby MastreNessuna valutazione finora
- Catalogo DNC100Documento21 pagineCatalogo DNC100Ricardo Alexandre OliveiraNessuna valutazione finora
- Esercitazione RiduttoreDocumento75 pagineEsercitazione RiduttoreEnrico Sabot100% (1)
- ITMM Esempio1Documento11 pagineITMM Esempio1Luca MarinoNessuna valutazione finora
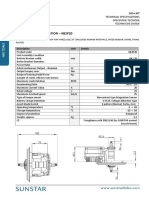
- s03 Motor Unit Kb2p20 de en ItDocumento3 pagines03 Motor Unit Kb2p20 de en ItMatt TanNessuna valutazione finora
- Bobine in AriaDocumento12 pagineBobine in AriaUbaldo TomarelliNessuna valutazione finora
- Barbisan - Tornitura - Esercizio 2Documento4 pagineBarbisan - Tornitura - Esercizio 2ravid80715Nessuna valutazione finora
- 026 Nuova ElettronicaDocumento84 pagine026 Nuova Elettronicacopec18032Nessuna valutazione finora
- Formulario Parametri Taglio Tornio PDFDocumento3 pagineFormulario Parametri Taglio Tornio PDFa9r8f4g5d4s8rNessuna valutazione finora
- Es Albero PuleggiaDocumento7 pagineEs Albero PuleggiaMichele AssirelliNessuna valutazione finora
- ProveciclicheDocumento32 pagineProveciclicheMichele PusateriNessuna valutazione finora
- CuscinettoDocumento4 pagineCuscinettocaterinaNessuna valutazione finora
- Bobine in AriaDocumento12 pagineBobine in AriaMarco IezziNessuna valutazione finora
- Tec Mec 15-09-14Documento4 pagineTec Mec 15-09-14antonioNessuna valutazione finora
- Viti e BulloniDocumento10 pagineViti e BulloniAngela ScottNessuna valutazione finora
- Dimensionamento e Verifica Di Un Riduttore MeccanicoDocumento45 pagineDimensionamento e Verifica Di Un Riduttore MeccanicoFrancesco ZaffinoNessuna valutazione finora
- Scheda T BR 70 2 80Documento1 paginaScheda T BR 70 2 80saberleffi1Nessuna valutazione finora
- Magnetic Tester DatasheetDocumento2 pagineMagnetic Tester DatasheetPeppeNessuna valutazione finora
- 14 Formule Per Oleodinamica PDFDocumento52 pagine14 Formule Per Oleodinamica PDFfabio100% (1)
- F.T. Caño LavaderoDocumento3 pagineF.T. Caño LavaderoJoseNessuna valutazione finora
- Idp000093it 03Documento10 pagineIdp000093it 03Bruno LambertNessuna valutazione finora
- GiranteDocumento17 pagineGirantePierumberto PampaninNessuna valutazione finora
- Temi D'esame 2008-2013 Risolti Meccanica Dei FluidiDocumento31 pagineTemi D'esame 2008-2013 Risolti Meccanica Dei FluidiGiovanni Talini100% (1)
- Relazione Sul CicloDocumento8 pagineRelazione Sul CicloFabio BerasiNessuna valutazione finora
- 99-RG7H1OR Da 1 8 3 KV A 26 45 KVDocumento8 pagine99-RG7H1OR Da 1 8 3 KV A 26 45 KVAbrakain69Nessuna valutazione finora
- SKF 16002 SpecificationDocumento4 pagineSKF 16002 SpecificationAndrea MozzoniNessuna valutazione finora
- Il DimensionamentoDocumento18 pagineIl DimensionamentoAndreaRaviolaNessuna valutazione finora
- FRANK CouplerDocumento7 pagineFRANK CouplerClaudioNessuna valutazione finora
- Vibrazioni Lavorazioni Fresatura - MancinelliDocumento25 pagineVibrazioni Lavorazioni Fresatura - MancinelliNational Instruments ItalyNessuna valutazione finora
- Esami Di Stato Svolgimento 2014Documento10 pagineEsami Di Stato Svolgimento 2014giuseppe baldassarreNessuna valutazione finora
- Dimensionamento Botola Di CoperturaDocumento5 pagineDimensionamento Botola Di CoperturaPasquale GiudiceNessuna valutazione finora
- Italcementi Mafia Pubblica Amministrazione CalcestruzziDocumento90 pagineItalcementi Mafia Pubblica Amministrazione CalcestruzziPino CiampolilloNessuna valutazione finora
- Bus CAN J1939Documento23 pagineBus CAN J1939FabianOrozNessuna valutazione finora
- Legge Regionale n.1 Del 03.01.2005Documento109 pagineLegge Regionale n.1 Del 03.01.2005nerowolf_123Nessuna valutazione finora
- Comandi Linux PDFDocumento62 pagineComandi Linux PDFpigeonskillerNessuna valutazione finora
- Honda Jazz Manuale UtenteDocumento413 pagineHonda Jazz Manuale Utentesirjole75840% (1)
- Esercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoDa EverandEsercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoValutazione: 5 su 5 stelle5/5 (1)
- Punti luce e Illuminazione: LED - Alogene - Luci fluorescenti - Faretti - Variatori - InstallazioniDa EverandPunti luce e Illuminazione: LED - Alogene - Luci fluorescenti - Faretti - Variatori - InstallazioniNessuna valutazione finora
- Elettrotecnica Generale: Circuiti Elettrici in Regime StazionarioDa EverandElettrotecnica Generale: Circuiti Elettrici in Regime StazionarioNessuna valutazione finora
- Esercizi di matematica: equazioni differenziali a derivate parzialiDa EverandEsercizi di matematica: equazioni differenziali a derivate parzialiValutazione: 5 su 5 stelle5/5 (1)
- Concorso Regione Campania - i Test RIPAM Informatica: Quesiti a risposta multipla di informatica tratti dalla banca dati del RIPAMDa EverandConcorso Regione Campania - i Test RIPAM Informatica: Quesiti a risposta multipla di informatica tratti dalla banca dati del RIPAMNessuna valutazione finora
- Impianti elettrici in esterno: Campanello - Citofono - Terra - Luci per giardino e laghetti - Pannello fotovoltaico - ParafulminiDa EverandImpianti elettrici in esterno: Campanello - Citofono - Terra - Luci per giardino e laghetti - Pannello fotovoltaico - ParafulminiNessuna valutazione finora
- Impianto elettrico di base: Salvavita - Quadro elettrico - Tester - Guaine murate - Canaline esterne - Impianto elettricoDa EverandImpianto elettrico di base: Salvavita - Quadro elettrico - Tester - Guaine murate - Canaline esterne - Impianto elettricoNessuna valutazione finora
- Circuiti di accensione: Interruttori - Deviatori - Invertitori - Relè - Faretti - Luce scale - LampadariDa EverandCircuiti di accensione: Interruttori - Deviatori - Invertitori - Relè - Faretti - Luce scale - LampadariNessuna valutazione finora
- Modello semplificato di arco nudo ricurvo - Analisi statica e dinamica - Parte primaDa EverandModello semplificato di arco nudo ricurvo - Analisi statica e dinamica - Parte primaNessuna valutazione finora
- Accumulatori per impianti ad energia rinnovabileDa EverandAccumulatori per impianti ad energia rinnovabileValutazione: 2 su 5 stelle2/5 (1)
- Analisi critica dell'articolo di Einstein_ITALIANODa EverandAnalisi critica dell'articolo di Einstein_ITALIANONessuna valutazione finora