Potrebbero piacerti anche
- Appunti Di Fisica (Classe Terza)Documento40 pagineAppunti Di Fisica (Classe Terza)Liceo F. VercelliNessuna valutazione finora
- (Ebook - Fisica) Esercizi Svolti Di Fisica 1 (198Pg) PDFDocumento198 pagine(Ebook - Fisica) Esercizi Svolti Di Fisica 1 (198Pg) PDFBarbara Misani75% (4)
- CatenariaDocumento24 pagineCatenariaLorenzo LupiNessuna valutazione finora
- Nozioni Di Geometria DifferenzialeDocumento199 pagineNozioni Di Geometria DifferenzialeGiamaicoNessuna valutazione finora
- Eserciziario FDADocumento153 pagineEserciziario FDAAmedeo Franco BonattiNessuna valutazione finora
- Esercizi Di Cinematica RisoltiDocumento34 pagineEsercizi Di Cinematica RisoltiWeather EarthquakeNessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Matt Compierchio100% (1)
- Vettori Coordinate PianoDocumento13 pagineVettori Coordinate PianoMattia FonteNessuna valutazione finora
- Formulario IdraulicaDocumento56 pagineFormulario IdraulicaFrancesco De Gaetano100% (1)
- Simboli MatematicaDocumento9 pagineSimboli MatematicamailkkNessuna valutazione finora
- Il Moto Uniformemente Accelerato: Prof. E. Modica WWW - Galois.itDocumento40 pagineIl Moto Uniformemente Accelerato: Prof. E. Modica WWW - Galois.itAbrahamNessuna valutazione finora
- CINEMATICA Del Punto MaterialeDocumento7 pagineCINEMATICA Del Punto MaterialeGabriele De LucaNessuna valutazione finora
- Cap 04Documento28 pagineCap 04nome.cognomenumNessuna valutazione finora
- 10) Meccanica Razionale Concetti BaseDocumento130 pagine10) Meccanica Razionale Concetti BaseDany StarkNessuna valutazione finora
- Cinematica Del PuntoDocumento29 pagineCinematica Del Puntoleluz__Nessuna valutazione finora
- Moto in Due o Tre DimensioniDocumento8 pagineMoto in Due o Tre DimensioniSimone VigoNessuna valutazione finora
- Appunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniDocumento55 pagineAppunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniLuca LatiniNessuna valutazione finora
- Esercizi CinematicaDocumento13 pagineEsercizi CinematicaNicola FunicelloNessuna valutazione finora
- Moto Di Un ProiettileDocumento3 pagineMoto Di Un ProiettileSilvia MarroccoNessuna valutazione finora
- Cinematica in BreveDocumento5 pagineCinematica in BreveAlessandro CamozzatoNessuna valutazione finora
- Esercizi Meccanica PDFDocumento62 pagineEsercizi Meccanica PDFfracescoNessuna valutazione finora
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Davide RaimoNessuna valutazione finora
- Caduta Gravi TOTALEDocumento12 pagineCaduta Gravi TOTALEmarcotalla86Nessuna valutazione finora
- Equazioni ParametricheDocumento11 pagineEquazioni ParametrichebiciolaNessuna valutazione finora
- Appunti FisicaDocumento6 pagineAppunti FisicajeckodevNessuna valutazione finora
- Le Trasformazioni Di LorentzDocumento29 pagineLe Trasformazioni Di LorentzBruno GaribaldiNessuna valutazione finora
- Es Relativita'Documento19 pagineEs Relativita'NjNessuna valutazione finora
- Moto Circolare UniformeDocumento6 pagineMoto Circolare UniformeEmanuele RameNessuna valutazione finora
- FisicaI TsDocumento4 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Dispensa N.4Documento15 pagineDispensa N.4fffiiutghyNessuna valutazione finora
- Moto ProiettileDocumento10 pagineMoto Proiettile小野碧子Nessuna valutazione finora
- Formulario AstroDocumento14 pagineFormulario AstroEmanuele RoccoNessuna valutazione finora
- SoluzionifisicaDocumento80 pagineSoluzionifisicaFederico DragoniNessuna valutazione finora
- Fisica CinematicaDocumento6 pagineFisica CinematicajackNessuna valutazione finora
- Esercizi Svolti Di Meccanica - Liceofermicanosa - ItDocumento16 pagineEsercizi Svolti Di Meccanica - Liceofermicanosa - Itgiuseppe baldassarreNessuna valutazione finora
- Il Moto ParabolicoDocumento6 pagineIl Moto Parabolicoiacopo.ricci03Nessuna valutazione finora
- Cinematica Punto MaterialeDocumento28 pagineCinematica Punto MaterialealterrosesNessuna valutazione finora
- 18 Moto Circolare Uniformemente AcceleratoDocumento5 pagine18 Moto Circolare Uniformemente AcceleratoElena RossiniNessuna valutazione finora
- Cinematica Derivate PDFDocumento5 pagineCinematica Derivate PDFuuqsoNessuna valutazione finora
- Lezione2 Cinematica PDFDocumento27 pagineLezione2 Cinematica PDFAlice PetruccettiNessuna valutazione finora
- Esercizi FisicaI ChimiciDocumento57 pagineEsercizi FisicaI ChimiciRossana LimaNessuna valutazione finora
- R.B. Appunti SbobbinatiDocumento58 pagineR.B. Appunti SbobbinatiAntonio PalombaNessuna valutazione finora
- Formule Ricorsive Delle Serie (F, G) Per Il Calcolo Delle Effemeridi Di Un Corpo CelesteDocumento5 pagineFormule Ricorsive Delle Serie (F, G) Per Il Calcolo Delle Effemeridi Di Un Corpo CelesteRitaDelGrilloNessuna valutazione finora
- 10 Moto Rettilineo UniformeDocumento2 pagine10 Moto Rettilineo UniformeFrancesco VedettaNessuna valutazione finora
- 1 Problemi (15) Di Cinematica in Una DimensioneDocumento13 pagine1 Problemi (15) Di Cinematica in Una DimensioneFrancesoNessuna valutazione finora
- 2419 Ese3Documento2 pagine2419 Ese3Sal MomiNessuna valutazione finora
- 02a Cinematica1-SP - Con NoteDocumento43 pagine02a Cinematica1-SP - Con NoteRossel DiazNessuna valutazione finora
- 13 Moto Rettilineo Uniformemente Accelerato PDFDocumento7 pagine13 Moto Rettilineo Uniformemente Accelerato PDFAlessandro AlpiNessuna valutazione finora
- Anteprima Del Libro Esercizi Di Fisica - RosatiDocumento16 pagineAnteprima Del Libro Esercizi Di Fisica - Rosatimelo astroNessuna valutazione finora
- Teoria Della Trave Dinamica Di EuleroDocumento14 pagineTeoria Della Trave Dinamica Di EulerotommasobrugoNessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- Omografia: Omografia: trasformazioni nella visione artificialeDa EverandOmografia: Omografia: trasformazioni nella visione artificialeNessuna valutazione finora
- Progressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Da EverandProgressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Nessuna valutazione finora
- Carboidrati AlimentiDocumento30 pagineCarboidrati AlimentiVito DileoNessuna valutazione finora
- Equazioni Differenziali - Tipologie e Metodi Risolutivi PDFDocumento4 pagineEquazioni Differenziali - Tipologie e Metodi Risolutivi PDFVito DileoNessuna valutazione finora
- Carboidrati AlimentiDocumento30 pagineCarboidrati AlimentiVito DileoNessuna valutazione finora
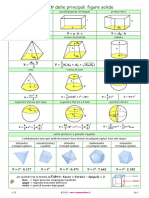
- Volumi Figure SolideDocumento1 paginaVolumi Figure SolideVito DileoNessuna valutazione finora
- Formule Avanzate - ExcelDocumento11 pagineFormule Avanzate - ExcelVito DileoNessuna valutazione finora
- Vcaslu HelpDocumento35 pagineVcaslu Helpvali1005Nessuna valutazione finora
- Casi Dinamica Delle StruttureDocumento13 pagineCasi Dinamica Delle StruttureVito DileoNessuna valutazione finora
- GlossarioDocumento11 pagineGlossarioFilippo EthòNessuna valutazione finora
- Stato Critico Cam ClayDocumento36 pagineStato Critico Cam ClayVito DileoNessuna valutazione finora
- Formulario Costruzioni IdraulicheDocumento22 pagineFormulario Costruzioni IdraulicheVito DileoNessuna valutazione finora
- Formulario Di Geotecnica Prima ParteDocumento1 paginaFormulario Di Geotecnica Prima ParteVito DileoNessuna valutazione finora
- ManovellismoDocumento4 pagineManovellismoGiotto AutomazioniNessuna valutazione finora
- Math Channels 101 Ita PDFDocumento15 pagineMath Channels 101 Ita PDFFausto CedrosNessuna valutazione finora
- Compiti Fisica VacanzeDocumento4 pagineCompiti Fisica VacanzeGiulia Benedetta Manuela BuselliNessuna valutazione finora
- Meccanica: CapitoloDocumento30 pagineMeccanica: Capitolofatjonmusli2016Nessuna valutazione finora