Potrebbero piacerti anche
- PlastDocumento5 paginePlastsignormitariNessuna valutazione finora
- PlasticitaDocumento6 paginePlasticitaGianfranco GhianiNessuna valutazione finora
- 05 La Teoria Della PlasticitàDocumento19 pagine05 La Teoria Della PlasticitàDonato ScaglioneNessuna valutazione finora
- 3b. Legame CostitutivoDocumento19 pagine3b. Legame CostitutivoGiovanniCuocoNessuna valutazione finora
- Elasticita 22Documento7 pagineElasticita 22vaffanculo987Nessuna valutazione finora
- Legame Costitutivo Elasto PlasticoDocumento32 pagineLegame Costitutivo Elasto Plasticofermat91Nessuna valutazione finora
- Legame CostitutivoDocumento3 pagineLegame CostitutivofrecciaaaNessuna valutazione finora
- Fat Frat OligDocumento5 pagineFat Frat OligsignormitariNessuna valutazione finora
- ReologiaDocumento25 pagineReologiaEduardo Malebran SotoNessuna valutazione finora
- Proprietà Meccaniche Dei Polimeri NewDocumento15 pagineProprietà Meccaniche Dei Polimeri NewnazarienNessuna valutazione finora
- Tecn 1904Documento56 pagineTecn 1904manuel.manaekoNessuna valutazione finora
- Tecnica Delle Costruzioni PIASTREDocumento37 pagineTecnica Delle Costruzioni PIASTREDoulgorikyNessuna valutazione finora
- Criteri Di Sicurezza - Elio Sacco PDFDocumento18 pagineCriteri Di Sicurezza - Elio Sacco PDFFerruccio RossiNessuna valutazione finora
- Verifiche Resistenza AcciaioDocumento35 pagineVerifiche Resistenza Acciaiogiuliano1980Nessuna valutazione finora
- Teoria Della PlasticitaDocumento16 pagineTeoria Della PlasticitaMary Joyce AlvarezNessuna valutazione finora
- PLASTICITA'Documento18 paginePLASTICITA'Furio FrascoliNessuna valutazione finora
- Teoria Della PlasticitaDocumento20 pagineTeoria Della PlasticitaDorian VitoNessuna valutazione finora
- Cerchio Di MohrDocumento36 pagineCerchio Di Mohrromario9Nessuna valutazione finora
- Criteri 0Documento9 pagineCriteri 0signormitariNessuna valutazione finora
- Teoria ElasticitaDocumento10 pagineTeoria ElasticitaMarco CotrinoNessuna valutazione finora
- Piriz JAP09Documento3 paginePiriz JAP09Antonio Roberto PirizNessuna valutazione finora
- 07 TDC PlasticitàDocumento31 pagine07 TDC PlasticitàgilianoluiseNessuna valutazione finora
- Concentrazione TensioniDocumento5 pagineConcentrazione TensioniGianluca MustilloNessuna valutazione finora
- Interazione Terreno Struttura IDocumento3 pagineInterazione Terreno Struttura IAleksiey PellicciaNessuna valutazione finora
- 12 Elasticita e PlasDocumento69 pagine12 Elasticita e PlasLuca TalentiNessuna valutazione finora
- Legame Costitutivo MaterialiDocumento16 pagineLegame Costitutivo MaterialiIl Conte CamiNessuna valutazione finora
- Flessione Progetto VerificaDocumento12 pagineFlessione Progetto VerificaAntonello SerratoreNessuna valutazione finora
- Criteri Di Resistenza - Scienza Delle CostruzioniDocumento10 pagineCriteri Di Resistenza - Scienza Delle CostruzioniValerio BozzoNessuna valutazione finora
- Materiali CompositiDocumento16 pagineMateriali Compositicosang91Nessuna valutazione finora
- Criteri Di ResistenzaDocumento12 pagineCriteri Di ResistenzaabdelNessuna valutazione finora
- Criteri Di ResistenzaDocumento11 pagineCriteri Di ResistenzafrenkooNessuna valutazione finora
- Criteri Di ResistenzaDocumento11 pagineCriteri Di Resistenzag_casalinuovo19812344Nessuna valutazione finora
- Tecnica Delle Fondazioni - Parte 3 - Interazione Struttura-TerrenoDocumento19 pagineTecnica Delle Fondazioni - Parte 3 - Interazione Struttura-TerrenoNicolaNessuna valutazione finora
- Criteri Di ResistenzaDocumento12 pagineCriteri Di ResistenzaTrinchettoNessuna valutazione finora
- (Ingegneria - Ebook - ITA) Costruzioni Di PontiDocumento82 pagine(Ingegneria - Ebook - ITA) Costruzioni Di PontiAndrea InfusoNessuna valutazione finora
- Prove Meccaniche Modulo ResistenzaDocumento30 pagineProve Meccaniche Modulo Resistenzalmax53Nessuna valutazione finora
- Analisi Dinamico-Meccanica in Sistemi ViscoelasticiDocumento36 pagineAnalisi Dinamico-Meccanica in Sistemi ViscoelasticiAlbert RocNessuna valutazione finora
- RTec005 09 GTDocumento7 pagineRTec005 09 GTMario ChinniNessuna valutazione finora
- L7 - Instabilità ElasticaDocumento12 pagineL7 - Instabilità ElasticaGius QuasingegnereNessuna valutazione finora
- Dispensa Sul Comportamento Elastico e Plastico Dei MaterialiDocumento12 pagineDispensa Sul Comportamento Elastico e Plastico Dei MaterialiRiccardo Meine ScaramuzzaNessuna valutazione finora
- Carico CriticoDocumento10 pagineCarico CriticoLaura BiasiNessuna valutazione finora
- Modulo YoungDocumento16 pagineModulo YoungconigliuNessuna valutazione finora
- Resilienza CompositiDocumento6 pagineResilienza Compositigala87Nessuna valutazione finora
- Push OverDocumento12 paginePush Overandrea_l1349Nessuna valutazione finora
- Relazione Tra Stress and Strain PDFDocumento8 pagineRelazione Tra Stress and Strain PDFFranco FranchiNessuna valutazione finora
- Teoria Delle LastreDocumento26 pagineTeoria Delle Lastrefrank_the_bangNessuna valutazione finora
- 38501-8.resistenza A TaglioDocumento27 pagine38501-8.resistenza A Tagliocivilengineer86Nessuna valutazione finora
- Corso Strutture VR CazzaniDocumento78 pagineCorso Strutture VR Cazzanituri75Nessuna valutazione finora
- PlasticitàDocumento84 paginePlasticitàbrunog83100% (1)
- Legame Costitutivo Elasto Plastico PRDocumento32 pagineLegame Costitutivo Elasto Plastico PRroccaNessuna valutazione finora
- Fatica in Controllo Di DeformazioneDocumento26 pagineFatica in Controllo Di DeformazioneStefano MilaniNessuna valutazione finora
- RecipientiDocumento13 pagineRecipientipaulNessuna valutazione finora
- FISI-Lezione 08 - 1-04-2016 - REVDocumento28 pagineFISI-Lezione 08 - 1-04-2016 - REVMalec17Nessuna valutazione finora
- Costruzioni in Zona SismicaDocumento76 pagineCostruzioni in Zona SismicaAlessandro RiposiNessuna valutazione finora
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Bus Vicenza Linea 2Documento4 pagineBus Vicenza Linea 2Nicola VirgilioNessuna valutazione finora
- Linea 1 Recoaro Vicenza AutobusDocumento4 pagineLinea 1 Recoaro Vicenza AutobusfrancescoleoNessuna valutazione finora
- CDM p1Documento12 pagineCDM p1Nicola VirgilioNessuna valutazione finora
- Esercizi Di ElettrotecnicaDocumento179 pagineEsercizi Di ElettrotecnicaMarco Salvatore Vanadìa0% (1)
- Dimensionamaneto Dellala FinaleDocumento23 pagineDimensionamaneto Dellala FinaleNicola VirgilioNessuna valutazione finora
- Es - Scheda2 Gaus PDFDocumento5 pagineEs - Scheda2 Gaus PDFNicola VirgilioNessuna valutazione finora
- Linea 1 Recoaro Vicenza AutobusDocumento4 pagineLinea 1 Recoaro Vicenza AutobusfrancescoleoNessuna valutazione finora
- CDM p2Documento32 pagineCDM p2Nicola VirgilioNessuna valutazione finora
- Es - Scheda2 Gaus PDFDocumento5 pagineEs - Scheda2 Gaus PDFNicola VirgilioNessuna valutazione finora
- 6.2 Fonderia P2Documento24 pagine6.2 Fonderia P2Nicola VirgilioNessuna valutazione finora
- FioreDocumento1 paginaFioreNicola VirgilioNessuna valutazione finora
- Lavorazione Per AsportazioneDocumento53 pagineLavorazione Per AsportazioneNicola VirgilioNessuna valutazione finora
- Costruzione Di Macchine 2Documento15 pagineCostruzione Di Macchine 2Nicola VirgilioNessuna valutazione finora
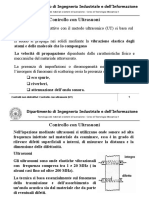
- Controllo Con UltrasuoniDocumento70 pagineControllo Con UltrasuoniNicola Virgilio100% (2)
- Controllo Con UltrasuoniDocumento70 pagineControllo Con UltrasuoniNicola Virgilio100% (2)
- Esercizio Esame 2004-06-04Documento3 pagineEsercizio Esame 2004-06-04Nicola VirgilioNessuna valutazione finora
- EsDocumento52 pagineEsNicola VirgilioNessuna valutazione finora
- Società IndustrialeDocumento1 paginaSocietà IndustrialeNicola VirgilioNessuna valutazione finora
- Esercizi Moto ParabolicoDocumento8 pagineEsercizi Moto ParabolicoArianna PantaloneNessuna valutazione finora
- Turbine A Vapore - Universita' Di FirenzeDocumento0 pagineTurbine A Vapore - Universita' Di Firenzemigss1074Nessuna valutazione finora
- Ceravolo - Strutture in Acciaio E in Cemento Armato PDFDocumento182 pagineCeravolo - Strutture in Acciaio E in Cemento Armato PDFValerio MastroianniNessuna valutazione finora
- Esercizi Svolti TDC PDFDocumento21 pagineEsercizi Svolti TDC PDFEgli NdoniNessuna valutazione finora
- DCI0200001 Rev01 4640N-4649N 16-25KVA-TE101 05-2019.cdrDocumento8 pagineDCI0200001 Rev01 4640N-4649N 16-25KVA-TE101 05-2019.cdrviệt dũng bùiNessuna valutazione finora
- CDM UNINA Lecture6Documento33 pagineCDM UNINA Lecture6simoneNessuna valutazione finora
- Università Di Pisa - Registro Lezioni - Marco Beghini - TECNICA DELLE COSTRUZIONI MECCANICHEDocumento6 pagineUniversità Di Pisa - Registro Lezioni - Marco Beghini - TECNICA DELLE COSTRUZIONI MECCANICHEFederico CasaleNessuna valutazione finora
- Appunti MastrulloDocumento84 pagineAppunti Mastrullodar1989Nessuna valutazione finora
- Rischi Specifici - ING. COLAFEMMINADocumento87 pagineRischi Specifici - ING. COLAFEMMINAFrancoNessuna valutazione finora
- Westcar RotofluidDocumento52 pagineWestcar RotofluidPedro Miguel SolórzanoNessuna valutazione finora
- Elementi Di Dinamica Delle StruttureDocumento67 pagineElementi Di Dinamica Delle Struttureaerospace1987Nessuna valutazione finora