Potrebbero piacerti anche
- Il Sistema Common Rail EDC16C34Documento31 pagineIl Sistema Common Rail EDC16C34suysuy00100% (4)
- Cambio Robotizzato 00Documento16 pagineCambio Robotizzato 00Elena Copelli100% (2)
- Pompe Centrifughe PDFDocumento15 paginePompe Centrifughe PDFVeraniJNessuna valutazione finora
- Cambio TCTDocumento32 pagineCambio TCTMacovei Lucian Florin100% (2)
- Cambio Automatico ZF Range Rover p38Documento64 pagineCambio Automatico ZF Range Rover p38putocalvoNessuna valutazione finora
- Centralina Weber MarelliDocumento48 pagineCentralina Weber Marellidieguito_maggio100% (2)
- Cammon Rail Hyundai ExcelenteDocumento35 pagineCammon Rail Hyundai ExcelenteAndres Jarrin100% (2)
- Valvole A CartucciaDocumento13 pagineValvole A CartucciaSalvatore MontaninoNessuna valutazione finora
- Common RailDocumento18 pagineCommon RailRocco Gentile100% (1)
- Common RailDocumento31 pagineCommon RailMichele Colombo100% (1)
- Valvole - OleodinamicaDocumento53 pagineValvole - OleodinamicaDanilo MontezanoNessuna valutazione finora
- Guida Tecnica Automobilistica - Dizionario Illustrato del Nuove Tecnologie: AutomociónDa EverandGuida Tecnica Automobilistica - Dizionario Illustrato del Nuove Tecnologie: AutomociónNessuna valutazione finora
- Controllo Elettronico Motore 4 TempiDocumento22 pagineControllo Elettronico Motore 4 TempiEsterino KarolliNessuna valutazione finora
- Descrizionecambio RobotizzDocumento48 pagineDescrizionecambio RobotizzMichele Colombo100% (4)
- Alfa Romeo 75Documento22 pagineAlfa Romeo 75Ligia Toma100% (2)
- Costruzione (TG 81SC)Documento7 pagineCostruzione (TG 81SC)adimaio_3dNessuna valutazione finora
- Fiat Punto GT - Impianto Di Alimentazione E Accensione Bosch Motronic M2.7Documento8 pagineFiat Punto GT - Impianto Di Alimentazione E Accensione Bosch Motronic M2.7Miguel CamachoNessuna valutazione finora
- Valvole OledinamicheDocumento63 pagineValvole OledinamicheantoniodellisantiNessuna valutazione finora
- Il Generatore Asincrono Trifase Nelle Centrali IdroelettricheDocumento23 pagineIl Generatore Asincrono Trifase Nelle Centrali IdroelettricheValentino BazzoliNessuna valutazione finora
- 1 P Valvole OledinamicheDocumento63 pagine1 P Valvole OledinamichemarcoNessuna valutazione finora
- Circuiti PneumaticiDocumento23 pagineCircuiti PneumaticiFranco FranchiNessuna valutazione finora
- ElettrovalvoleDocumento5 pagineElettrovalvoleJoe FalchettoNessuna valutazione finora
- Attuatori e Valvole PneumaticheDocumento40 pagineAttuatori e Valvole PneumaticheMichele RossatoNessuna valutazione finora
- Valvole Pneumatiche PDFDocumento14 pagineValvole Pneumatiche PDFFrancescoNessuna valutazione finora
- Studio e Progettazione Di Una Stazione Di Lavoro ElettropneumaticaDocumento21 pagineStudio e Progettazione Di Una Stazione Di Lavoro ElettropneumaticaStefanoNessuna valutazione finora
- Cap4 PDFDocumento12 pagineCap4 PDFFabio PelleritoNessuna valutazione finora
- Simbologia Pneumatica - 2Documento5 pagineSimbologia Pneumatica - 2Tommaso LeatiNessuna valutazione finora
- Slide Attuatori PneumaticiDocumento23 pagineSlide Attuatori PneumaticivitroNessuna valutazione finora
- 1 ElettropneumaticaDocumento45 pagine1 ElettropneumaticapasqualeNessuna valutazione finora
- Clima 2Documento10 pagineClima 2techtrain5199Nessuna valutazione finora
- Catalogue ACV PAM - Saint GobainDocumento31 pagineCatalogue ACV PAM - Saint GobainaleasanderNessuna valutazione finora
- Carburace Pegaso ItDocumento7 pagineCarburace Pegaso ItPAOLO BERSANNessuna valutazione finora
- Distribuitoare MonoblocDocumento14 pagineDistribuitoare MonoblocVicu AedohNessuna valutazione finora
- Comandi e Cicli SequenzialiDocumento31 pagineComandi e Cicli Sequenzialichevi sssNessuna valutazione finora
- Distribuzione Variabile e Sistemi VVADocumento61 pagineDistribuzione Variabile e Sistemi VVApierluigiwdi2001.netNessuna valutazione finora
- Autoregolatore DeutzDocumento2 pagineAutoregolatore DeutzMic MahalbakarNessuna valutazione finora
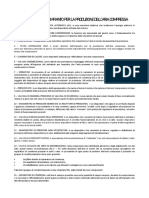
- 02 - Produzione Aria CompressaDocumento1 pagina02 - Produzione Aria CompressaAntonio PadovanNessuna valutazione finora
- EletttropneumaticaDocumento20 pagineEletttropneumaticaDonato PaglionicoNessuna valutazione finora
- IMPIANTO PNEUMATICO-libroDocumento28 pagineIMPIANTO PNEUMATICO-libromarcoNessuna valutazione finora
- PN14 3MECA SartoriDocumento2 paginePN14 3MECA SartoriNicolò SartoriNessuna valutazione finora
- Azionamenti - Azionamenti A FluidoDocumento15 pagineAzionamenti - Azionamenti A FluidoFranco Maria RossiNessuna valutazione finora
- POMPA VU Istruzioni ItDocumento5 paginePOMPA VU Istruzioni ItGino SomaroNessuna valutazione finora
- Raptor650 CobustibleDocumento36 pagineRaptor650 CobustibleAlejandro MorardNessuna valutazione finora
- Descrizione Turbina VaporeDocumento41 pagineDescrizione Turbina VaporeFRANCISCO JOSE GARCIA IBAÑEZNessuna valutazione finora
- ChopperDocumento7 pagineChopperclayton54Nessuna valutazione finora
- Resumen SimbologiaDocumento6 pagineResumen SimbologiaDAVID MATIZ VEGANessuna valutazione finora
- Cap.05 - La Timoneria (Bozza)Documento10 pagineCap.05 - La Timoneria (Bozza)simonerowingNessuna valutazione finora
- Gpa Valvole Sicurezza Presse Press Safety Valves Rev 11Documento14 pagineGpa Valvole Sicurezza Presse Press Safety Valves Rev 11kuhn403825Nessuna valutazione finora
- Fasatura DistribuzioneDocumento4 pagineFasatura DistribuzioneAnonymous J9WbiBNessuna valutazione finora
- Sollevatore IdraulicoDocumento21 pagineSollevatore IdraulicovittorioNessuna valutazione finora
- ManlimDocumento16 pagineManlimEdiNessuna valutazione finora
- SAM SteeringDocumento22 pagineSAM Steeringdan PaulNessuna valutazione finora
- Azionamenti Elettronici Motore AsincronoDocumento17 pagineAzionamenti Elettronici Motore Asincronodimay36641Nessuna valutazione finora
- Scheda Tecnica Gruppo Di Miscelazione in Ottone PMF + Scheda PRSCHDocumento15 pagineScheda Tecnica Gruppo Di Miscelazione in Ottone PMF + Scheda PRSCHbluci@Nessuna valutazione finora
- Volvo L150 E - Hydraulic Brake SystemDocumento3 pagineVolvo L150 E - Hydraulic Brake Systemsixin93551Nessuna valutazione finora
- Variatori Di Fasae 2017 PDFDocumento77 pagineVariatori Di Fasae 2017 PDFssasNessuna valutazione finora
- Ddlmanual - Manuale Officina - Ford Focus Tdci-UnprotectedDocumento39 pagineDdlmanual - Manuale Officina - Ford Focus Tdci-UnprotectedPierpaolo PaniNessuna valutazione finora
- Esercizi di fisica: termodinamica e trasmissione del caloreDa EverandEsercizi di fisica: termodinamica e trasmissione del caloreNessuna valutazione finora
- Usa l'energia solare mobile: la tua strada verso l'autosufficienzaDa EverandUsa l'energia solare mobile: la tua strada verso l'autosufficienzaNessuna valutazione finora
- Rugosità Ra RT RZDocumento1 paginaRugosità Ra RT RZMassimoNessuna valutazione finora
- Rondella Di Sicurezza Zigrinata Tipo Schnorr - PDFDocumento1 paginaRondella Di Sicurezza Zigrinata Tipo Schnorr - PDFMassimoNessuna valutazione finora
- Seeger Per Fori - UNI 7437Documento4 pagineSeeger Per Fori - UNI 7437MassimoNessuna valutazione finora
- Meccatronica Applicata 03 - Rapporto Ottimo Trasmissione - 30-Nov-2005Documento21 pagineMeccatronica Applicata 03 - Rapporto Ottimo Trasmissione - 30-Nov-2005MassimoNessuna valutazione finora
- L05 QuotaturaP2Documento16 pagineL05 QuotaturaP2MassimoNessuna valutazione finora
- L04 SezioniDocumento16 pagineL04 SezioniMassimoNessuna valutazione finora
- 6 ProduzioneMetalmeccanicaDocumento13 pagine6 ProduzioneMetalmeccanicaMassimoNessuna valutazione finora
- Locomotiva Ferrovie Dello Stato D445Documento13 pagineLocomotiva Ferrovie Dello Stato D445josephjordanNessuna valutazione finora
- Idranti - Tubazioni InterrateDocumento3 pagineIdranti - Tubazioni Interrate7gelatiNessuna valutazione finora
- Chek List Sivacon s4Documento5 pagineChek List Sivacon s4Jessica PhillipsNessuna valutazione finora
- Atlante Eolico ItaliaDocumento57 pagineAtlante Eolico Italiaricciolo77Nessuna valutazione finora
- Mo CRD 2 RD 951 100 P 101 105 ItDocumento42 pagineMo CRD 2 RD 951 100 P 101 105 ItMatteoTrigliaReatoNessuna valutazione finora
- Manual de Usuario UPS SENTRY HPSDocumento35 pagineManual de Usuario UPS SENTRY HPSElmer Huayra HuanhuayoNessuna valutazione finora
- Codice Del Condominio PDFDocumento85 pagineCodice Del Condominio PDFAnonymous CLMLlxNessuna valutazione finora