0 valutazioniIl 0% ha trovato utile questo documento (0 voti)
575 visualizzazioni52 pagineOP1000 Serie1
Caricato da
Giorgio GiuntaCopyright
© © All Rights Reserved
Per noi i diritti sui contenuti sono una cosa seria. Se sospetti che questo contenuto sia tuo, rivendicalo qui.
Formati disponibili
Scarica in formato PDF o leggi online su Scribd
0 valutazioniIl 0% ha trovato utile questo documento (0 voti)
575 visualizzazioni52 pagineOP1000 Serie1
Caricato da
Giorgio GiuntaCopyright
© © All Rights Reserved
Per noi i diritti sui contenuti sono una cosa seria. Se sospetti che questo contenuto sia tuo, rivendicalo qui.
Formati disponibili
Scarica in formato PDF o leggi online su Scribd
OPW1200 SE
BT OPWi 200 HSE
DPL900:
_EFFETTO DELLA FORZA FRENANTE
LA FORZA FRENANTE: E" CONTROLLATA: A SECONDA DELLA VELOCITA” DEL CARRELLO
(ECCETTO QUANDO. T SENSORI DI. VELOCITA” SI GUASTANO), COME OT SEGUITO:
“UNG SPECCHTO' OT FRENO'VIENE ATTIVATO A VELOCITA" < 0.8 m/s (CIRCA 2.9 Km/h)
DUE SPICCH DT’ FRENO: VENGONO APPLICATI: A’ VELOCITA” COMPRESE TRA: 0.8 m/s
E123) m/s: (CIRCA 4.7 Km/h} :
TRE SPICCHT DT FRENO: VENGONG: APPLICATI: @. VELOCITA" MAGGIORT.
TL VALORE! OL: RIFERTMENT!
TRAZTONE: VIENE: RIDOTTO: A’ SECONDA# DELL ALTEZZ® DI SOLLEVAMENTG, COME DT SEGU:
_-AIDUZTONE: DELLA VELOCITA": FUORT. CORSTA A
(2.58 m/s C9 km/h) SELLA CABING: SI: TROVA: SOTTO: 0.8 mt,
Lit m/s: (4 km/h). SE:LAY CABINA ST TROVA: SOTTO 2.8 mt:
0.7 m/s. (2.5° km/h) SE LA CABINA ST TROVE SOPRA 2.8 mt:
(ouztont. pr veLactTa” IN CORSTA CON GUIDE MECCANICHE A
2.5 m/s (9 km/h)’ SE LA CABINA SI _TROVA SOTTO 2.8 mt
0:7 m/s (2.5: km/h) SE LA: CABINA ST TROVA: SOPRA 7.8 mt.
ED & VALORT INTERMEDI ATTRAVERSO L" EQUAZIONE:
2.5 - 0.36 * ( ALTEZZA - 2.8 ) (TUTTI I VALORI IN mt. € m/s)
RIDUZIONE DI YELOCTTA" IN CORSIA CON FILOGUIDA A
2.5 m/s (9 km/h) SE LA CABINA SI TROVA SOTTO 2.8 mt
0.7 m/s (2.5 km/h) SE LA CABINA ST TROVA SOPRA 6.5 mt
ED @ VALORI INTERMEDI ATTRAVERSO L” EQUAZIONE:
2.5 - 0.45 * (ALTEZZA - 2.8) (VALORI IN mt E m/s).
(UL CARRELLO MARCIA IN FOLLE SE. LA VELOCITA" E” TROPPO ALTA. UNA VELOCITA”
ECCESSIVAMENTE ALTA PUO" ESSERCI SU UN PAVIMENTO INCLINATO SE IL
CARRELLISTA SOLLEVA LA CABINA MENTRE. FA LA TRAZIONE (DIAGONALE)
: SPEED. AS A FUNCTION OF
VELOCITA™ “Tg FUHZIOMS OSL ALT
ALTE24
Height [m eS °
eight |m] vow eonsia, Aueola Rust Propvahves
Maxhoight ee Feovane, tows
Specheight: Aries
> rivers:
Dead: ~
|
Lit.
‘override |__|, oPERATOR
LDeadm ____ | PROT. al
Gates: > |
closed | j
Alste:t,2. Steering
AisleMiddle AISLE
WireParam: rATUS: |
Speed-
sensors:
Drivemoter:
Supervision
Steering:
Wireguid.
Drivachop:
Brake
BRAKE
SUPERV
sONTRL
sv |
StoorPot: |. (ORIVE. MODEL_
Fwa/Backw
| 1 SPEED Throttle:
> wirequidance
signals
Sigma.
chopper.
Brake 1,28.
i»
Warn. Lamp
-————>
" AgCOMPLa:
LISTA DEI COMPONENTI
aL
a2
as
a4
As.
a6
ar
er
&2
ES
AL
(34
70
HES
HE7
H89
(30
K10
Kil
K1s
30
k40
60
PANNELLO ELETTRONICO TRAZIONE
SCHEDA@ ELETTRONICA PRINCIPALE
UNITA” ELETTRONICA STERZO ELETTRICO
INOICATORE BATTERTA
UNTTA" OT CONTROLLO. VALVOLA PROPORZIONALE:
EQUIPAGGIAMENTO: FILOGUIDA:
LAMPADA:. SINTSTRA- CABINA
LAMPADA. DESTRA: CABINA
LaMPaDA: DI LAVORO SINISTRA
LAMPADA: DI LAVORO. DESTRA:
FUSIBILE OI POTENZA PER ML
FUSIBILE OI POTENZA PER MS
FUSI8ILE DI POTENZA PER Md
FUSIBILE PRINCIPALE PER AS
FUSIBILE OI SICUREZZA FER GLI. INGRESST
FUSIBILE OI SICUREZZA PER LE USCITE
FUSIBILE DI SICUREZZA PER LE LAMPADE CABINA
FUSIBILE DI SICUREZZA PER LA. CABINA
FUSIBILE DI SICUREZZA k10
FUSIBILE DI’ SICUREZZA PER Ad
CONTAORE
cLacsoNn
SPIA ‘STERZO ORITTO
SPIA DI. ERRORE
SPIA DI MACCHINA SUL FILO (SOLO CON FILOGUIDA)
SPIA DI INNESTO FILOGUIDA CON CURVE
SPIA CATENE ALLENTATE
LAMPEGGIATORE
TELERUTTORE CHIAVE
TELERUTTORE AVANTI
TELERUTTORE INOIETRO
TELERUTTORE PER MS.
TELERUTTORE PER Md
TELERUTTORE DI SICUREZZA
2
“ OPCOMPL2:
Lista
369
870
374
875
879
580
SB
$82
887
sas
530
So
(too
S101
$102
S103
S104
S108
3106
S107
Sioa
$109
8120
S121
un
DEI. COMPONENTI
MOTORE.-TRAZIONE.
HOTORE POMPA SOLLEVAMENTO: CaBrNA
MOTORE: POMPA. SOLLEVAMENTO, MONTANTINO
MOTORE: DE:.STERZO: :
POTEN ETOMETRO™ AVANTE/INOLETRG. iG
POTENZLOMETRO!SOLLEVAMEN: TO/DTSCESA,
POTENZIOMETRO. DELLO: STERZO’
RESISTENZA: DI: PROTEZIONE: PER Me:
MICRO: MARCIA. .AVANTI.
MICRO: MARCIA: INDIETRO.
INTERRUTTORE: CHIAVE
PULSANTE) CLACSON
INTERRUTTORE DI’ EMERGENZA. IN" CABINA.
INTERRUTTORE DI EMERGENZA SULLO CHASSIS
PULSANTE: SOLLEVAMENTO/DISCESA. MONTANTINO
MICRO, OT FRENATURA. OT SERVIZIO
MICRO SOLLEVAMENTO CABINA
MICRO DISCESA CABINS
SENSORE DI ZONA CENTRALE CORSIA, ANTERIORE (FRENO DI FINE CORSIA)
SENSORE DI. ZONA CENTRALE CORSIA, POSTERIORE (FRENO DI FINE CORSIA)
SENSORE MACCHINA IN CORSI4, ANTERIORE,
SENSORE MACCHINA IN CORSIA, POSTERTORE
MICRO CATENA LENTA .
MICRO CATENA LENTA
MICRO CANCELLETTO SINISTRO
MICRO ‘CANCELLETTO DESTRO
MICRO CANCELLETTO SINISTRO MONTANTE PANORAMICO,
MICRO CANCELLETTO DESTRO MONTANTE PANORAMICO
MICRO ACCESSO AL PALLET MONTANTE. PANORAMICO
SENSORE UOMO MORTO MANOPOLA SINISTRA
SENSORE. UOMO MORTO: MANOPOLA: DESTRA
TRASMETTITORE IMPULSI DI VELOCITA", CANALE: 1
TRASMETTITORE IMPULSI DI VELOCITA" CANALE 2
MICRO CABINA SOTTO T 0,8mt
TRASMETTITORE MISURATORE DI ALTEZZA, CANALE &
TRASMETTITORE MISURATORE DI ALTEZZA, CANALE B
CABINA SOTTO. LA MASSIMA ALTEZZA
MICRO SOTTO CATENA
PULSANTE OI SUPERAMENTO SOTTO CATENA
INSERIMENTO DEL SISTEMA FILOGUIDA
INSERIMENTO DEL SISTEMA FILOGUIDA CON CURVE
GENERATORE DEI SEGNALI DI STERZO
OPCOMPLS:
LISTA DEI COMPONENTI
WL
w2
YL
2
YS
ya
Ys:
Y10.
Yur
viz
ANTENNA ANTERIORE (FILOGUIDA)
ANTENNA POSTERIORE:.( FILOGUIDA)
VALVOLA: PROPORZIONALE SOLLEVAMENTO CABINA,
VALVOLA: PROPORZIONALE: DISCESA: CABINA
ELETTROVALVOLA: DISCESA. CABINA
ELETTROVALVOLA. DISCESA. MONTANTING®.
VALVOLA: PROPORZIONALE: DISESA. MONTANTINO
ELETTROFRENG: PARTE”
ELETTROFRENO: PARTE a
ELETTROFRENO: PARTE. 3 ‘
ws
INTERBLOCCHI
VIENE E:
MINATO INTERBLOCCO)
(1 HZ. BLOCCO DEL COMANDO, RESET ALTOMATICO QUANDO
CANCELLI NON CHTUSI
MANOPOLA UOMO MORO TENUTA PER
TROPPO
B CARAT A SINISTRA INDICA LA MANO-
pou Sitisea: ‘ouELO A DESTRA INDICA LA
MANOPOLA DESTRA_
iL CARATTERE Di SINISTRA PUO' ANCHE
INDICARE CHE LA MANOPOLA Di SiNistra O IL
PULSANTE ‘OCATENA NON SONO ATTUATI
QUANDO LA MACCHINA LAVORA IN CORSLA.
SENSORE Di ALTEZZA SPECIALE NON ATTI-
VATS.
PUL Di ALTEZZA SPECIALE E SOTTO
CATENA NON VAN
SEN:
i MASSIMA ALTEZZA NON ATTIVA-
‘TRAZIONE £ SOLLEVAMENTO BLOCCATL
DI BATTERIA SCARICA
NE DEL SOLLEVAMENTO CABINA.
SEGNALE Di GUASTO DAL SISTEMA
FILOGUIDA KELTRONICS.
Guase nella jovice OP codice 0
OPPURE GUASTO NEL VALORE DI RIFERI-
MENTO ALLA LOGICA SIGMA (TENSIONE
TROPPO ALTA)
Guazto nol relé di sicarecza o codice 1
perdita del filoguida
(oie con sizema filoguida)
Geaso ae pamnelio trazione codice 2
manca i segnale Sigma OR.
Gass ad sasti di velocita oodice 3
mai regolato
ji sensei 2 casi non funzionane
Guaso aa seasore oi aterm — codlice 4
sensare iaduiivo oppore
wensere Drstapde i riferimento
Seasore comraie di corsia ancccacodice 5
atzivato fori corsa,
(Scio coa irensrare di fine cocsia)
Micro iramone avantvindietro della codice 6
jopsick inceppati
Segnaie avanti ingwtro nello steswm tempo)
HE servo sorzo detrico manda segnali codice 7
feoatrollare Pust servo serzp AJ)
Guasto nel cavo del filoguida — codice 8
(Golo con sistema filoguida)
ri
La macchina non segue il filoguida
© deragiia,
(comroilare il pot. R3 0 i cavi)
codice 9
CHASSIS UNIT
ee 2
f
| ELECTRICAL PANEL
|
|
|
aD
ELECTRICAL PANEL
se
L
X21 we X22 X23 of X20 KIT
7 fox oft o
1afo =of or
1 alow oft a]
rife a
v tifs<"SUt
om uy
cc ~ -
3 SSS 7 =
Uv ~
od = 7 a = :
a SS —
oO
wm = =
w vse
uv : loo-tasma. Lav 18
la vas
fq we -
a PE a
< : = = — =
A3 Power steering unit
[ANTY WAR
: SEAL
8T PART 127192-001 |
| Sane |
a
0]
Ql
a
| a
173 6
Seay jo-=|/COOCC0G|
(
89 0 728
ean”
i
om
ies’
@3 UNITA’ SERVO STERZO
Indicazioni
Lo. Sterzo bloccate (LED rosso)
Lp2 Riduzione di velocita’ sterzo (LED rosso)
Los, Selezione del filoguida (LED verde)
Loa @limentazione interna (LED verde)
Los, Controllo tachimetrica sterzo (LED rosso)
LD6 Controllo circuito del regolatore (LED rosso)
7 Controllo circuito motore sterzo (LED rosso)
Interruttori OIP
sw. 1 on Corrente max 58
1+2 ON Corrente max 104
143 ON Corrente max 158
1+2+3 ON Corrente max 208
4 oN @mplificazione bassa
5 ON Amplificazione media
6 ON Amplificazione alta
7 Interruttore frequenza: off=8kHz on=16Khz
a NC
swW2 Controllo tachimetrica sterzo
SWS Controllo circuita del regolatore
sha Controllo circuiti del motore
Connettore Cavo No. Funzione
1 42 Moniteraggio rele’, uscita del teleruttor
2 94 Ingresso per bloccare il servosterzo KsO
3 122 +/- 8V ingresso difterenziale
4 74 Tachimetrica di sterzo
5 9S Ingresso angolo di sterzatura > 80 Gradi
6 73 Tachimetrica di sterzo
7 - -12
8 34 Ingresso del rele’ di controllo
9 44 Uscita dal rele’ di controllo
10 123 Ingresso differsnziale ov
at 42. Ingresso commutazione filoguida
iz - NC
13 - +12
2. 20 +48V ingresse
22 40 Negative ov
23 is Motore di sterzatura
28 16 Motore di sterzatura
AD Proportional valve Controlunit
fork lowering
Pile RaMP © (STaRT and stor) zadj. from the manufacturer
P2=NoT uséo
P3= lowering speed: =6£-70 See(adl, from the manufacturer)
PGs wet USED zadj. from the manufacturer AK ecw )
zadj. from the manufacturer
RIGHT Posimend FoR. BT Poe, Value.
Solenoid valve, lowering Y4
time delay
td al
- Pi = adj. from the manufacturer
I
taove
. Lore
Ire
. D4
- Pay iug!) site Ir
evdnmeial | OOF |
1!
+ aoed
ave 8? ory
sz My
993
5130 Uni
Seviye ml is
eworiince/evet
“d
: ' ue
ye Abe ve %
od sod 4
odsielNaianialt vaso 2k EIFS ig
puwidd real? 7
sense Oy \
Apt id 48
AGY viaLivE
Ww
5 ‘ {+a —
5. BT a or ST T C 6 e
ft 30vd
i ‘| _
ai ge a ee
4h) o4oy vavoy OEM ‘finn FA
oy Poa veman ines
he
ae -
alata
iol boe
th
+
L i i
; e v ;
al
pig) \ \
ti oa ty \ chi i
puenories
foot gulag g 1 ee 8G i
tif whe a xd,
fA Ad49. sauc| g|—
ne epabersi\ 1a oition. “aos 66 — Lane
vig F300
Wig! 3 4 snivis vidis| ¢| ——— tj ——?2 1
u Maes Shiels ek fs yore |
9 tS
paves |
Tiiiyd worsieay Ty gteset |
Tayuoisioa | gresod |
pia rebyh e717Hned t
OFA osbql OV
nape Nee
i
¥
i q 2yers
: we aareis
rove
6 ~eor7e
a ba0ve
02 a
7 ao oxyals, Sva10y
oro
| st ru *
cavers 8 oo rf
videweois 09 xoevs
oaaa a1}
98
Laovd -y30vd
tovie - 70018
as
eaove
sore :
io
we i
We q
0 ont e
on isnvancy VdHOd
tagve evenayae le
rere
a 3 Z io aT or (TET 1 —3r BF % E z ¢
ELLEEL i
; - ~ 53070 $3070
some sovia
{ —|
eut7e £0 — ot 1
MOTE ©
‘0u}-— w Dy
| (tere) 27m e130
Foon 315 gw il
. LLInoNyO ie
‘srorecuseg, w1s%D 2409 . os |
morn TREN tre
auave on VIS OVO", 08S H ,
Sporn 5 wx ke sex
‘60 — Is
auiy hd sea *U21, 61S 4
ahusia gros > HRY:
uanoisna > 1hoW wavs 7 x
“yeiaB450NmD > arpHouOY 7 b
avy > salir vip s9¥ |
ees Vipin hates! six
xvn> arpxowox © 4}
Ww
ax
8 oh — i
& nl
4
ape wiibes? | we p
2oyiw3: 108 1 940
vivebye lo
aaa @ tof
sz petgeate vaceyneis ca0vd r20ve ig
° forsin bois . = |__|
ta} +4 oi avi
onvasuas onmorvauang © coos oo
w
Ov! dy WW YOVIU DN IB
ay sionpold 1a
o00t ao vHaH9s?3 fae
teres
r*
: s30vd
< 4 sovig h
orl 7 ox ax us zx ux
‘wisadss orp @ tp —— — — — = ee eee eee
-ouox ius 14493e¥ 01 (70 go) GrNeHS 7ET insurvetes QVIHH > BOIS pt
PUBL eTousie 5
PPE Rana aise a tx ux & f ocx tx
Lavasroainivis © 602 9 = aie Si wa Bee
7 Les SeHgibe 9778G ova “ha ir
° a» Roope on tg tx on ise ex vx
vyoowzi5 uvonl sox}— —— aT
ooNrAs uvONIUD OSL usnemnso tee O07 7 18S
anes © C94 te wels¢ oval ors : da
sngyerensS £390 ggg gg a mx 2 ow pox ex ae |
ana 695 | 49
oxemvove ix oot 2 0% 0K _te eal P
pIgigHt OdeHYDY ax 2x oe 2 O¥ ope tex 2
ve & 50x] 65
pire asia CuLEGH! Oa 1g ' ih
LLMeAY O8NMECS _ » Eqn oo > 0% oom ex tex Fr
aynves © 74 a TMeAT CVI org |
of egevdasi | s
td, Tine eae oud 1s ——_# tex som 2 0% om are wx | P
auvi Lueshoue Tyistet \oneuy 789 ovaly ats |
L5G wroscriwy oft U su0n i: |
Tow Sen as hee | og — we texto to atx tx! ia
eau9sNvna00 8209H WUiER VresenmM wasHes |gy| Wx We ty
is wegen oLveU ey oe To1s i i
(Rann Son owas tae He fa us sx tow tox uy ax) 1
ae3u05Ie2Ho9O UaESHEA cal foul zo" ez ax
Musinis W7edonvy gue seg Wet
a ‘ors |
Is
| ts 0%
| shove ;
Bi eT 1 ow 5 g aaoe ¥ t
ose do
Laove
* Lone
ne
bt
falsing owls
a 2 isragm evasmes ee Ir
L eee
q
ex
}— s4——
1H
ee St
ewes ¢ i ~
oye E | gp 8 eye eory _f] i
2 aueils 7s 7
cuLewowwers I 4
F
fa f
+ cod = ~
ouy ax ix
ro vgpene (azn pemiet one
69
SANT WY es190 2 :
owen vbr Gave? iis'??7 xt _001x \
wIveI yes HY tL |
quifiwad “0d | i
oan 10
AGTH ion Tix 22X _OOIx
WLID5% ins toe As
iB
to
$ 20¥e Ww
ore
€ T rc
7 :
ELLEEL Ory 0001 do i f
i i
eaove P
bore 4
CSV Wie? cB4eas 527
uw ee ie BEM es SA aha
po9@ ayy an rawads
“,
ih t20vd uaian anf SON?
Vara Et ors
we
—_— 06
ex - ie i
calinprywiE re se ts @ snare
a oueue 7a 2 O1VANTS 4 ong
ax n alae A ayvae Panes te
oe 0 p95@ Soweoves. t
as 2S ony
* ax dave 27AN ISL
: +] a 95 swowsdays t
ork
aight! fu opvane,
ee pore sete ite
ae aK PITT nove xt
ea LarwA¥ |. 2y0d*IH0D
4 _ cose sab eiioe A
TIReAE—aTay eT | wives ty
ebeuLeye7OL try
“yrsara Ig ones Siaay
= og tere i : BASS
Apre zavie ~ Gs i ae BOUYANE
2 2ove 40 ang
ND rove ame e@ vox |
~ on hee
oes — Ww toe have
0 cone
2
TOOT TE
Tr wT { 7 or a a z
000L do iv
: 1 i
sors B 30d — 26 —————_ a
Bavie au ox yanymnt ast
iu ot eae
eeexe wx wee gy 008s Sila souks bt:
Casta 2 759 nai fF © ontyanibninss
(ey vate” orn visva ded resvnats id:
2a ita San 3 ohare hata
. | cw — aig Fisiv ally asechi Ir
Fenouas onmnee Not 409 syroweszanyonyD w3KHNS
7H : \
; EZR nd SEE
(29r6 ve vere MORASS CHEF
case 226 ouikwvhusnouals
298 GF fig Y Ot URIS
c30¥e cg ob < onhlst Srey #258
cavie 7 oa pane ov< 01 ] ANAS: 1H.
ozaptisepurs o12bvoz0
cava _| Sears oto mt
corte 46 eee onesuss omean0re 49
{
ry Lan ear 19S
~ - ——— 6 wre Teaveuret 7
hes 28 ven VI,
Sire edn
w- rose
estree weave pen 3
rer wrasLer? EA i
$$$ 6s -
vis ageUd ¥7OAT UA Pp
ios Te 06 “eiotvoaed
PIM O1Zeagoud | —— — 2yrenolluosoud
i wren WACV LETS 2d Be)
i edoud ¥101 ty) ia
} Nolo wows
: on MaMbA GIES Wwuolwodoud
aby. P7yHONZ Yes
eae 0701 7A MaLe7: te w
a ara a a a t
By sionpold 18 GEG |
oot do
erareuprunrn 1a Ub
a Cy won wuow |
| onisingasiaeue
i
Amor mieva . 23 |
niusanae 90x i
a WHO 297
: atx
wooed) |
tx
i 1
| : — Hl
|
2h HNL toN WBS my |
priboreditad V 4h yeranens ont soso |
| aan ee | eae
| Suna Goud ef ETA TuAOULLIE
j 439 ays canvucd
/ e028 Sina)
|
OMMnV INO 738A) | oe
| san qeuned 4), F tp Fe
‘suuos 82M07 ot
/ Yidsyo sys a 7 ax hs vet eat
T anicneat veHad |S Opiiansned a [) 7
| | BvALLevEeT sony vsexdfnog 02h 7 :
en suuos tan i
wyigava 144
07 zo LL
vf
tab: | e20re cape
ee e ie tare
6 eS er Sr = oe o T 5 ¥ ¥ =
ooo! do
BNVOIND 381M gyemyod wnnainy oxviore vin ty
ONINCIQSONITS BunYEE NNELMY— SuvO NNALI 4
a a obi AGS
i
i
i
pavers i
2M )aoraassog |
[Link] feed
Stone i
|
S2eh55 280888 ae? onmnrgaohivsensians |
oinusais Hs aouyAupauals oxinxya}
owtiwsss 3004 14
goor exrrovs os ou |Fasnwone avi alte ane
oF5e cnaves q
‘Joo ownos- votryottsan 99 1h
“eof —— 4
VONNS B25 5H ‘combos 1SeD4 DOH 0 Tal
aoc} to cav207= 1K anna : i 4c
vouns ya isyreh & 21 zu ” aan rr 1 : lp
eee V9. nea” WB
ence c17U eres senate axe | aut saan) oNaruo
aati na“ 1 si me swingoanant i
soy + [
JO HEIZOWA ELTY ETVNGES A :
Peds aacie ak iar 3a eg so0vhioes shina
‘vo owINFIpAoNNS +H a ue aS O aye, ppt 3
sous van a | oot 267
iiseon _ | so sotvhwo3 a41v0
t ar pre (> wag oanttainly I?
cir] sin_za_to 59 ze Lene esdrew Pp
Chey . i >.
Zs Tihs” AHHH
pavae HO veesen, I etx a wr 2507 Gok
ood “Srenie 5 ESS) ath 7 —o ° io
aon 5 ee TO vous yd
ausna aoncone ae Te [x ex | isu oe [fe | ves
ST ETI | Saya oN OETSST 7 TURING 3
sovaino 34 10 wxt_——04 | le
org tie worsggy OS! 4 eo -
Trove [woo Sor 7] EBbve b
hE tere !
ov Vy
5. 8 v- F yr z T
pote oF rig 1 t
© pein oo y a Fox ‘rag ata ~
LISTA CONNESSIONI DELLA sei
EDA ELETTRONICA DELL’ OP1O00/ 1200
Ingressi
Pin’ cave Acceso LeD
No. No
43 Stato della logica Sigma OV 1oL
44 Monitoraggio del servo sterzo zo0v fon
4s Indicatore batteria scarica OK 20V 103
46 Misuratore di altezes canale A zov 108
47 Misuratore di altezza canale B 20 105
48 Cabina tutta a terra 20 106
‘ 49 Cabina sotto la massima altezza —20V 107
40, Cabina sotta l’altezza sottotrave 20V 108
51 Sensore corsia anteriore 20v 109
52 Sensore corsia posteriare 20v 110
¢ 53 Sensore corsia zona centrale
(solo con frenatura di fine corsia)
55 Manopola uomo morto sin. attivata 20V 201
56 Manopola uomo morte dest. attivata 20V 202
7 Micro freno $48 non attivato 20v 203
58 Micro avanti $18 attivato 20v 204
59 Micro indietro $16 attivato 20v 205
60 Micro soll. cabina S69 attivato 20V 206
el Micro discesa cabina 870 attivato 20V 207
62 Cancelletti chiusi 20v 208
64 Micro catene allentate Ok 20y 209
66 Sollevamento sopra l’altezzs
sottotrave $109 attivate 20V
2: a NC
68 Valore di riferimento av/IN
Analogico
68 Valore di riterimento SOLL/DIS cabina Analogico
70 Tensione positiva al
C3 potenziometro-di~sterzo +755V.
3:4 7 Valore del potenziometro di sterzo — Analogico
3:5 7 Valore del potenziometro di
sterzo (con filoguida) Analogice
3:6 72 Tensions negativa al potenziometro
di sterzo -7,5¥
3:7 75 Impulsi dal sensore motore
trazione canale 1, $102 attivo 20v 307
3:8 76 Impulsi dal sensore motors
trazione canale 2, 5105 attivo ov 308
110 Filo guida non attivato aay 309
118 Filo guida con curve attivato 20v 310
N.C.
4:1 Controllo fileguida OK av
4:2 Filoguida agganciato 20v
Filoguida trovato 20v
N.C.
Nec.
Uscite
Pin cavo
No. No. attive LED
4:6 107 Direzione di marcia avanti
al filoguida 20v 406
4:7 77 Direzione di marcia indietro
al filoguida 20v 407
115 Filoguida con curve agganciato ov 408
116 Reset - filoguida ov 409
121 Servosterzo in fileguida 20V 410
== iis
Sth 73 Consenso traz. (al pannello si@ma) ov 501
5:2 80 Valore di riterimento potenziom
sia avanti che indietro Analogico = --~
5:3 aL Al teleruttore marcia avanti Kil 48V S03
5:4 82 Al teleruttore marcia indietro Kis 48V 504
5:5 B5 Freno step 1, sbloccato 4gv 505,
5:6 Ba Freno step 2, sbloccato 4av 506
5:7 85 Freno step 3, sbloccato aay 307
5:8 a8 Valvola proporzionale sollev. + Analogico 508
529 89 yalvola praporzionale sollev. - — analogico =
5:10 30 Valvola proporzionale discesa + Analogico 510
Sri 31 Valvola proporzionale discesa - — Analogico =
6:1 Be Lampeggiatore aay 601
ed Bz Quote in posizione centrale 20v 602
& 32 elettrovaiVela di discesa 4By 603
6:4 33 Teleruttore di sollevamento aay 604
6:5 34 Servosterzo bloccato
(in corsia con guide meccaniche) 20V 605
6:6 98 Angolo di sterzatura maggiore di
BO gradi 20v 606
100 Ciealine di fine corsia 20V 607
101 Indicatere di errore (lampeggia) 0/20V 608
102 Consenso per il montantine aay 609
10S Contaore 4gv
114 Sul Filoguida 20v
61
2.3
ALIMENTAZIONI
N°Pin N° Cavo Acceso LED
701 22. Positive generale (48 V)
702 21 Positive scheda A2 (48V)
703 21 Positive 48V (riserva)
704 34 Teleruttore K60 attivato (STERZO) 4aV 704.
705 40 Negative scheda A2 (OV)
706 40 Negative consenso filoguida (OV)
707 67 20V stabilizzata
708 67 20V stabilizzata consenso fiioguida
709 67 20V stabilizzata (riserva)
710 40 Negativo elettrovaivola discesa, luci di sicurezza (OV)
m1 40 Negativo OV (riserva)
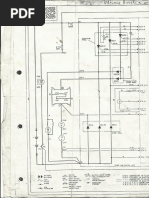
| DESCRIZIONE DELL*IMPIANTO ELETTRICO DELL” OP LOOOSE/HSE
Disegno No. 153773
1)Circuito dell’interruttore principale, K10, &
contaore/indicatore di batteria (pagina 1)
- Il teleruttore principale, K10< ha il suo fusibile, F 65 (7.5
A).
= Il circuito di comando di K10, contiene gli interruttori di
mergenza SZ1 ed $22. Anche la chiave S17 si trova in questo
cuito.
8.
= Anche lo strumento combinato per l’indicazione batteria
yntaore, ha il suo fusibile, F6é6é (7.5 A).
- Quando la capacita’ di batteria scende ad un livello troppo
basso, il contatto all’interno dello strumento si apre
interrompende il il cavo 45.
- Il contaore misura il tempo per il quale il cavo Na. 103 e*
positivo (+48V).
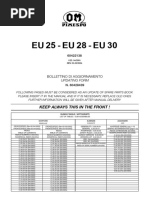
2) Pannello trazione ad S.C.R, motore trazione, motors pompa,
sollevamento cabina (pag. 2)
-"I1 pannello trazione @1 ed il motore trazione Ml sono protetti
dal fusibile F1 (100 &). C10 e’ un condensatore di filtro per i
disturbi. K11 e@ Ki3 sono i teleruttori di direzone.
B
= Il motore pompa M3 per il sollevamento cabina,
fusibile F3 (250 A).
protetto dal
a.
-'I1 motore pompa M4 serve al montantino ed e’ protetto da
fusibile F4 (50 A).
= I] fusibile F60 (20 4) serve per il servo sterzo AS.
4.9
|
|
3)Servo sterzo = motore pompa montantino (pag. 3)
- Il fusibile Fé1 (7.5 A) serve per le alimentazioni alle uscite
della scheda a2.
- Il fusibile F62 (7,5 A) serve per l’alimentazione della scheda
a2, ed il suo riduttore di tensione 48/20 volt.
ce
- U1 e* la tachimetrica di sterzo che invia gli impulsi di
controllo all’unita’ servo a3.
= Mé ©’ il motore di sterzo (motore a magneti permanenti).
C
= K60 cortocircuita il rotore di Mé su una resistenza Ré quando
il servosterzo viene bloccato. Questo significa che il rotore
viene ploccato.
- Un segnale alto (+ 20V) nel cavo 95, significa che 1’angolo di
sterzatura e’ maggiore di 80 gradi. La velocita’ di sterzo viene
quindi ridotta per avere un arrivo al fine corsa di sterzo lento.
= Un segnale alto (+ 20V) nel cavo 94, blocca il servosterzo.
(es. in corsie con guide a terra).
- Un segnale alto (+ 48V) nel cavo 34 abilita le sterza.
- Un segnale alto in uscita dal cavo 44 dice alla logica
elettronica @2 che il rele’ di controllo sulla scheda servosterzo
3 e’stato attivato, e che abbiamo un + 48V in uscita dal cavo 42
“al teleruttore Ks0, che si attiva.
4) Ingressi alla scheda elettronica A2 (pag. 4)
ce
Questi ingressi servono per le funzioni di controllo, indicazione
di altezza, generatore di impulsi per la misura di altezza ed
indicazione di corsia. Il micro deli’altezza sottotrave viene
normalmente ponticellato.
5) Ingressi alla scheda elettronica A2 (pag. 5)
Qui troviamo gli ingressi per le manopole uomo morte, ed i micro
freno, avanti, indietro, sollevamento e discesa, gli interruttori
dei cancelletti, e dei sensori catene lente, ©, come funzione
optional, il micro per proseguire il sollevamento in caso la
macchina sia equipaggiata con il micro sottotrave.
2.9
6) Ingressi analogici alla scheda elettronica a2 (pag. 6)
Gli ingressi qui descritti provengono dal potenziometro trazione,
dal potenziometro di soll/disc. , dal potenziometro sul motore
sterzo e dai sensori di velocita’ sul motore trazione. 1
potenziometri di trazione e di soll./disc. si trovano nella
joystick ed adottano la posizione centrale (+10 V) quando la
Joystick si trova in folle.
7) Uscite dalla scheda elettronica A2 (pag. 7)
Queste uscite sono inviate al pannello trazione Sigma, ai
teleruttori di marcia, alle bobine del freno elettromagnetico,
Alle lampade ed al contaore.
@) Uscite dalla scheda elettronica A2 (pag. 8)
Aueste uscite vengono inviate alle valvole proporzionali per il
(511./ disc. cabina, alla elettrovalvola di discesa, al
teleruttore della motore pompa (soll, cabina), al motore
servosterzo ed alla lampada lampeggiante. Se il carrello e*
equipaggiato con sistema di frenatura di fine corsia, il cicaline
sara’ collegato all’uscita 607.
9) Sollevamento/discesa del montantino (pag. 9).
= $34 e' l’interruttore doppio per il soll/disc. montantino.
= K40 si chiude per alimentare il motore pompa m4 (pag 3).
- @5 e° il controllo proporzionale per l’elettrovalvola Y5, che
viene usata per la discesa forche.
= Y4 e' la bobina della valvola di discesa forche.
- In questa pagina si notano inoltre il clacson e le luci di
illuminzione della cabina.
10) In questa pagina viene descritto il sistema filoguida
(optional).
DESCRIZIONE DEL FUNZIONAMENTO DELL’OP 1000 SE/HSE
Disegno No. 133773
1) Accensione
Quando l’interruttore chiave S17 ed i pulsanti di emergenza
$21 ed 522 sono chiusi, il teleruttore K10 viene attivato
alimentando tutto l’apparato elettrico. Durante questa fase
viene fatto un controllo dalla logica principale e da quella
di sterzo, prima che la luce verde sul cruscotto H70 si
accenda. Questo richiede alcuni secondi. Impugnando la
manopola uomo morto durante questa fase, comparira un errore
di funzions con lampeggio lento (1 Hz) della spia verde H70
L’errore di funzione viene automaticamente cancellato
rilasciando la manopola. N.B. & necessario attendere 5 sec
tra lo spegnimento e l’accensions della macchina. Una
eccessiva rapidita pud causare un codice di guasto
(normalmente codice 7). Il pannello trazione Sigma ha una
Uscita negativa sul cavo No. 45 ingresso 101 (led 101 acceso)
se & OK
2) Manopola uomo morto
a
La manopola uomo morte destra deve essere attivata per poter
usare il carrello (anche quella sinistra se la macchina in
corsia). Il freno viene disattivato quando @ attivato l’uomo
morto destro. Il periodo in qui la manopola uome morto &
attiva viene controllato per evitare funzionamenti errati
tempo di manopola attiva viene contato, anche se nessuna
funzione della macchina viene usata. La manopola uomo morto
deve essere rilasciata entro un tempo di tre minuti
altrimenti le funzioni di trazione e sollevamento vengono
bloccate. La misurazions del tempo riparte una volta che la
mano Viene riappoggiata.
IL
Trazione avanti-indietro
a
I micro SiS © S16 vengono attivati muovendo la joystick
avanti o indietro. (Pag. 5). Pertanto i microinterruttori
determinano la direzione di marcia. Anche il potenziometro Ri
(Pag. 6) viene attivate provocando un aumento o diminuzione
della tensione (in posizione di folle = 10 Volts). £’ solo
una variazione di tensione che determina la velocita di
trazione; per esemoio una variazione da 10 a 9 Volts, o da 10
a il Volts, dara la stessa velocita
8.
I teleruttori di direzione Kil o K13 (Pag. 7) vengono
attivati, e abbiamo 0 Volt all’uscita 501, trazione (Pag. 7)
cavo 79 al pannello trazione. (LED 501 acceso). Anche
l’uscita 502 @ attiva, 3.0 - 4.0 Volts al pannello Sigma.
4.9
ch
Una volta attivato Kil o Ki3, ed il pannello Sigma ha
ricevuto 0 Volt all’ingresso 8 e la tensions di acceleratore
all’ingresso 2 (valore di riferimente), il pannelio inizia a
pulsare ed il carrello a muoversi (Pag. 2).
D.
La velocita di trazione viene continuamente controllata dai
sensori $102 ed 5103. I sensori sono montati sul motore
trazione ed ognuno emette una serie di impulsi, con una
sfasatura di 90°, quando la ruota trazione @ in movimento.
E.
La scheda elettronica A2 determina la velocita massima di
trazione del carrello, con riferimento all’altezza ed ai
sensori di velocita.
3) Velocita di marcia
A. In generale
Con cancelli aperti © cabina sopra i 0.8 m la trazione &
bloccata.
B. Fuori corsia
Con cabina sotte i 0.8 msi ha la velocita massima. con
cabina tra 0.8 © 2.8 msi ha la velocita dimezzata. Se in
questa situazione si sterza la ruota oltre i 10°, la velocita
viene ridotta al minimo. Ad un’altezza superiore a 2.8 m si
ha sempre la velocita minima.
c. In corsia
con cabina sotto i 2.8 msi ha la massima Velocita. Con
cabina oltre i 2.8 msi ha una riduzione progressiva della
velocita che dipends dalla stabilita e dalla forza di
frenatura richiesta. Vedi diagramma.
De
Velocita massima = 9 km/h
Meta velocita = 4 km/h
Velocita minima = 2.5 km/h
4) Frenatura
a.
La forza di frenatura viene controllata in funzione della
velocita di moviments. Uno step di freno (¥10) viene
applicato ad una velocita minore di 2,9 km/h. Uno step
successive (Y11) viene applicato dopo 1 secondo ed un’altro
(Yi2}dopo 2 secondi. Due step di freno (Y10 ed Y1L) vengono
applicati direttamente con velocita sopra i 2.9 km/h ma
inferiore a 4.7 km/h. Un’altro step (Y12) viene applicato
dopo 1 seconds. Tre step di freno (Y10, Y11, Y12) vengono
applicati quando la velocita supera i 4.7 km/h.
8.
Il freno viene applicato sia quando si agisce sulla joystick
S48, che quando si toglie la mano dalla manopola uomo morto
destra.
5) Sterzo
a.
La sterzatura @ ottenuta agendo sul volantino in cabina.
Tl volantino @ attaccato ad una tachimetrica che trasmette i
suoi impulsi alla logica servosterzo AS. Questa unita servo
controlla un motore a magneti permanenti che funziona come
motore di sterzatura (M6). La variazione di velocita di
sterzatura @ strettamente proporzionale alla velocita di
rotazione del volantino in cabina. I1 teleruttore K60 é
attivato quando la logica servo & attiva.
B.
Il potenziometro RS & montato sul motore di sterzo M6 &
trasmette informazioni riguardo all’angolo di sterzatura alla
logica A2. Ad un’angolo di sterzatura maggiore di 80°, la
velocitaé di sterzo viene ridotta per ottenere un arrivo al
fine corsa meccanico pil morbido (Pag. 3).
c.
Quando il carrello entra in una corsia con guide a terra,
lo sterzo si muove fino a che la ruota direzionale si porta
in posizions rettilinea. La lampada sul cruscotto Hed si
accende. Quando la macchina entra in corsia $79 ed S80 sono
attivati. Il bloccaggio dello sterzo avviene attraverso il
cavo 94 il quale si porta ad un valore positive facendo cosi
staccare K60. In posizione di riposo K60 cortocircuita
L’armatura del motore di sterzo su una resistenza Ré, in
questo modo il motore di sterzo viene tenuto fermo in
posizione rettilinea e non si pud muovere.
D
I comandi di trazione vengono [Link] caso di guasto
sullo sterzo.
6)Sollevamento cabina
a.
Il sollevamento cabina viene ottenuto tirando verso l’alto la
joystick, cosi il micro S69 viene attivato (pag. 5). Allo
stesso tempo viane comandata RZ determinando la velocita di
sollevamento (Pag. 6).
Come per la trazione, @ la variazione in tensione che
determina la velocita di sollevamento. (Posizione neutra = 10
Volt).
6.9
8.
Ora c’& una tensione sull’uscita 604 verso K30, il quale
attiva il motore pompa M3 (Pag. 2). La valvola proporzionale
YL @ alimentata in corrente attraverso le uscite S08 © 509,
essa controlla la velocita di sollevamento.
ce
I cancelletti devono essere chiusi per poter sollevare la
cabina oltre gli 0,8m.
7)Discesa della cabina
A.
La discesa della cabina viene ottenuta spingendo verso il
basso la joystick, cosi da attivare il micro S70 (Pag. 5).
Allo stesso tempo viene attivato il potenziometro R2, il
quale determina la velocita di discesa (Pag. 6).
Come per la trazione anche in questo caso @ la variazione in
tensione che determina la velocita di discesa (Posizione
neutra = 10 Volt).
8.
$i ha cosi una tensione positiva sull’uscita 603 verso YS,
che si apre (Pag. 8). La valvola proporzionale Y2 @
alimentata in corrente dalle uscite 510 e 511, controllando
la velocita di discesa.
c.
I cancelletti devono essere chiusi per poter azionare la
discesa da altezze superiori 2 0,8m.
8)Misuratore di altezza
a.
La misura dell’altezza viene effettuata usando due sensori
induttivi (S10S, 5106) posizionatisul_montante.. Un’asta con
delle alette é fissata al montante intermedio il quale
muovendosi fa passare le alette davanti ai sensori. I sensori
sono montati in modo da avere uno sfasamento di 90°. La
precisione @ di circa 21mm (Pag. 4).
B.
All’altezza di 0,8m (S104) ed alla massima altezza (S107), si
trovano due interruttori magnetici bistabili che indicano il
passaggio della cabina a queste altezze (Pag. 4).
La misurazione dell’altezza in fase di sollevamento parte
quando la cabina passa il sensore dei 0,am.
c.
Un limitatore extra di altezza di sollevamento (sottotrave) é@
disponibile come optional. Viene installato un sensors
addizionale (S108), ed il ponticello sull’ingresso 108 viene
tolto.
+4
Un pulsante di superamento altezza sottotrave viene inoltre
montate in cabina e collegato all’ingresso 210 (Pag. 5).
9) Sensore di catana allentata
A.
I sensori di catene allentate $81 ed S82 interrompono il
movimento di discesa cabina. &’ permesso un sollevamento di
soli 200mm.
10) Sollevamento del montantino
834 viene attivato, chidendo K40 (Pag. 3).
K40 attiva il motore pompa M4, @ le forche si alzano (Pag.
3). N:8: La manopola uomo marto destra deve essere attivata
per poter comandare il montantino.
11) Discesa montantino
AL
834 viene attivato e di conseguenza Y4 apre. I1 controlio
della valvola proporzionale AS manda una corrente di
controllo ad YS, cosi da ottenere una partenza ed un’arresto
di discesa forche lento.
12) Frenatura di fine corsia (sauipaggiamento addizionale)
a
Non esiste una riduzione automatica della velocita quando si
@ in corsia.
Quando il carrello sta per uscire dalla corsia , il carrello
pud interrompere la corrente al motore ed attivare il freno
ad un punto predeterminato (solitamente circa 4 m) prima
della fine della corsia, = solo se la velocita supera quella
minima (inching speed).
Il carrellista pud imterrompere la frenatura portando la
joystick in posizione neutra.
Se la velocita di movimento é quella minima o minore, il
carrello passera nel punto di frenatura di fine corsia senza
che questa intervenga.
B.
Per avvisare l’operatore che il carrello si trova nella zona
immediatamente adiacente alla fine della corsia, viene
attivato un segnale acustico attivando la manopola uomo
morto.
c.
Lo equipaggiamente prevede dei degli interruttori magnetici
S74, S75 (Pag. 4) montati sotto la macchina, © dei magneti
permanenti a pavimento nelle corsie.
8.4
oD.
Un cicalino viene collegato all‘uscita 607 (Pag. 8).
ISTRUZIONI PER LA REGOLAZIONE DELL’IMPIANTO ELETTRICO OP/OPW
_Attivare la manopola uomo morto di destra (usando uno straccio umido)..
Regolazione della frequenza iniziale di marcia
_Collegare una +20V all’ingresso 204 (LED 204 per OP) o all'ingresso 205 (LED 205 per
OPW).
_Regolare il potenziometro “S" della scheda MS-90, fino a che non si sente un’ suono
dovuto alla bassa frequenza (approsimativamente SV sulla scheda).
Regolazione delle corrente di marcia.
_Scollagare il connettore dal freno (x8).
“Connettere un tester in Volt ai capi dello Shunt sul pannello tyristor:
“Muovere completamente in avanti il joystick (con la cabina abbassata, in modo da
permettere la velocita massima).
_Regolare il potenziometro “M" della scheda MS-90 fino ad arrivare a misurare 180mV ai
capi dello Shunt (=230A).
Regolazione del centraggio della ruota motrice.
Per evitare regolazioni errate nell'allineamento della ruota motrice, specialmente in
occasione di pavimenti in non perfetto stato, vi consigliamo di porre la ructa motrice su
una superficie metallica piana oppure di sollevare ‘il carrello in modo da svincolare la
ructa dai problemi del pavimento. Errori nel centraggio della ruota causano un'errato
settaggio dei parametri legati all'allineamento automatico della ruota stessa. Il massimo
angolo permesso rispetto il giusto allineamento & di 3/4 gradi.
_Regolare il potenziometro di zero sulla scheda A2, in posizione centrale.
“Posizionare la ructa motrice, come detto, il pit dritta possibile,
TRegolare il potenziometro posto sul motore trazione in modo che i led L e R siano accesi
‘contemporaneamente.
_Se, dopo aver fissato nuovamente il potenziometro sul motore, i led L o R dovessero
spegnersi, effettuare la regolazione fine del potenziometro di zero sulla scheda A2 in
modo da ristabilire la condizione i entrambi | led accesi.
Regolazione dell'Offset de! sollevamento,
_Premere leggermente il joystick in modo sollevamento fino a far chiudere il microswitch.
“Regolare il potenziometro del sollevamento fino a che la cabina non entra in trazione
cominciando a salire.
Regolazione del!'Offset della discesa,
_Premere leggermente il joystick in modo discesa fino a far chiudere il microswitch.
“Regolare il potenziometro della discesa fino a che la cabina comincia a scendere.
N.B.: una caratteristica comune della salita e della discesa della cabina operatore @ il
fatto che le rampe di accelerazione e velocita sono programmate dalla casa produttrice,
| Regolazione del generatore d'impulsi del motore trazione.
\'sensori sono regolati in modo da generare una tensione pari a 10V quando il carrello &
in situazione di marcia. II codice errore “3” appare in caso di incorretta regolazione dei
sensori.
| Regolazione dei sensori per la regolazione dell'altezza.
I sensori sono incassati allintero di un blocco plastico, montato parallelamente ad un
binario che permette la lettura dell'altezza ed appoggiato al binario stesso.
_L'indicazione 0,8m e quella dell'altezza massima di sollevamento sono permesse da due
sensori magnetici bistabili. Un sensore di altezza supplementare é installabile, su ordine
del cliente, per impostare una diversa altezza massima di sollevamento (sottotrave).
DISPLAY _INDICATORE DELLA SCHEDA OP
IN GENERALE
delle cembinaricni di segaali che possono essere immessi nella sched OP ¢ molto
uic, Unese Sigmfice che goo essere Molto difficolioso dat segnali ai ingresso alla scheda canire
gerche # carello aon fonclona nel modo giuso, Il display a sexe segmemti puo’ alutare i tecnico
‘con Jumlormazione legate codici errore. interblocco ditraziane 0 di altezza.
Un pumo decimale lampegeiante indica che il microprocessore lavora regolarmente ed il
frogramma sta girando normaimente.
Laltezza 2 normaimeme mostrate come numero dei metri misurati. Questa informazione e
mostrata dal display come numero da 0 a9 che rimane sempre [Link] display completamente
spema, wranne il sumero decamale che lempeggia, indica che il camello stéto reseato con Ja
cabina ad unaltecza superiore ai 0,8 mt, senza abbassarla poi. Se Ja cavina viene poi abbassama
foo essere indicata una alterza sbagliata,
Inserblocce viene wtiesto quando 1a macchias sffora un comendo perche uaa o pit condizioni
sono soddistane, per esempio se i cancelleti non sono chivsi con la cabina ad une altecza
ecsore @ 0.8 mt, Questa informezione viene evideazista da un segmento del display che
fa ad una iroquenza dj circa (J HZ) un flash al secondo,
01
gridenciate come codice erore da | a F e con rapido ampeggio del carattare
pit delle condizioni richiene per un dato comando on sono
2 viene assento dalla sebeda OP come un errare di comando. Non appena questo
memo deidisplay smene di lampeggiare ¢ ricomincia ad indicare
ora figrondere il funzionamento la sequenza di comand.
la scheda dei’ OF he scopeto una combinazione di segnali di ingresso
mass codice errore con lampeggio rapido. il codice exrore “iene
@ puo essere resem solamente spegneado le machine per almeno 3
conti
Lampada
[a iampada indicatrice di errore in cabina 2 aormalmemesemore accesa. In caso di intarhiecco,
essa lampaggera lentameate essieme al display (1 HZ).nel caso ct sopraggtunta eodice errore, esa
lampeggers ‘sduna irequenza doppia come il display 2 HZ),
A_4
ISTRUZIONI_ PER LA REGOLAZIONE__DELL'IMPIANTO
ELETTRICO DEI CARRELLI BT OP/OPW 1000.1
(fino alla matricola 241680 compresa; scheda thyristor MS-90)
*Attivare la manopola uomo morto di destra (usando uno straccio umido).
Regolazione della frequenza iniziale di marcia.
*Collegare +20V (per es. filo n°67, uscita n°707 della scheda ausiliaria A2) all'ingresso
204 (LED 204 per OP) 0 all'ingresso 205 (LED 205 per OPW).
*Regolare il potenziometro “S* della scheda MS-80, fino a che non si sente un suono
dovuto alla bassa frequenza (approsimativamente 3V sul pin 2 della scheda MS-90).
Regolazione della corrente di marcia
* Scollegare il connettore del freno (X8).
*Connettere un tester in Volt ai capi dello Shunt sul pannelio thyristor.
*Muovere completamente in avanti il joystick (con la cabina abbassata, in modo da
permettere la velocita massima).
+Regolare il potenziometro “M" della scheda MS-90 fino ad arrivare @ misurare 180mV ai
capi dello Shunt (corrispondenti a 230A).
Regolazione del centraggio della ruota motrice.
N.B.:Per evitare regolazioni errate nell'allineamento della ruota motrice, specialmente in
oceasione di pavimenti in non perfetto stato, vi consigliamo di porre la ruota motrice su
una superficie metallica piana oppure di solievare il carrello in modo da svincolare la
ruota dai problemi del pavimento. Errori nel centraggio della ruota causano un’errato
settaggio dei parametri legati allallineamento automatico della ruota stessa. I massimo
angolo permesso rispetto il giusto allineamento 6 di 3/4 gradi
‘*Regolare il potenziometro di zero sulla scheda A2, in posizione centrale.
*Posizionare la ruota motrice, come detto, il pili dritta possibile.
*Regolare il potenziometro posto sul motore trazione in modo che i led L € R siano accesi
contemporaneamente.
*Se, dopo aver fissato nuovamente il potenziometro sul motore, i led L 0 R dovessero
spegnersi, effettuare-la-regolazione fine del potenziometro di zero-sulla scheda [Link]
modo da ristabilire la condizione di entrambi i led acces
Regolazione dell’Offset de! sollevamento.
*Premere leggermente il joystick in modo sollevamento fino a far chiudere il microswitch.
*Regolare il potenziometro del sollevamento fino a che la cabina non entra in trazione
cominciando a salire,
Regolazione dell’Offset della discesa,
«Premere leggermente il joystick in modo discesa fino a far chiudere il microswitch,
*Regolare il potenziometro della discesa fino a che la cabina comincia a scendere.
N.B.: una caratteristica comune della salita e della discesa delle cabina operatore @ il
fatto che le rampe di accelerazione e velocita sono programmate dalla casa produttrice,
pag 1 oi2
Regolazione del generatore d'impulsi de! motore trazione.
| sensori sono regolati in modo da generare una tensione pari a 10V quando il carrello &
in situazione di marcia. Il codice errore "3" appare in caso di incorretta regolazione dei
sensori.
Regolazione dei sensori per la regolazione dell’altezza.
| sensori sono incassati all'interno di un blocco plastico, montato parallelamente ad un
binario che permette la lettura del'altezza ed appoggiato al binario stesso
+ Lindicazioné 0,8m e quella dell’altezza massima di sollevamento sono permesse da due
sensori magnetici bistabili. Un sensore di altezza supplementare & installabile, su ordine
del cliente, per impostare una diversa altezza massima di‘sollevamento (sottotrave).
pag 2 di2
Potrebbero piacerti anche
- Um Est122 1 Toyota BT Levio Lpe200 Lpe250!02!15Nessuna valutazione finoraUm Est122 1 Toyota BT Levio Lpe200 Lpe250!02!1577 pagine
- Service Training: Carrello Elevatore Linde Con Motore Termico H 50/60/70/80 D/T H 50/60/70/80 D-02/T-02 Tipo 353Nessuna valutazione finoraService Training: Carrello Elevatore Linde Con Motore Termico H 50/60/70/80 D/T H 50/60/70/80 D-02/T-02 Tipo 353198 pagine
- EP 40 EP45 EP50 CAT Uso e ManutenzioneNessuna valutazione finoraEP 40 EP45 EP50 CAT Uso e Manutenzione78 pagine
- EFG 540k FN516181 Spare Parts Catalog ItNessuna valutazione finoraEFG 540k FN516181 Spare Parts Catalog It737 pagine
- OM - XG25 - XG30 - Catálogo de Peças (Italiano)Nessuna valutazione finoraOM - XG25 - XG30 - Catálogo de Peças (Italiano)20 pagine
- Catalogo Tecnico Reach Toyota BT Reflex R E SeriesNessuna valutazione finoraCatalogo Tecnico Reach Toyota BT Reflex R E Series4 pagine
- Manuale Revisione WMT - REV02 - IEmNessuna valutazione finoraManuale Revisione WMT - REV02 - IEm19 pagine
- Parametri Di Codifica BMW - F56 - Per MINI Cooper e Cooper SNessuna valutazione finoraParametri Di Codifica BMW - F56 - Per MINI Cooper e Cooper S5 pagine
- Manual de Instalación de AU96 PDFNessuna valutazione finoraManual de Instalación de AU96 PDF24 pagine
- Clark Schabmuller-Trazione MotorerNessuna valutazione finoraClark Schabmuller-Trazione Motorer51 pagine
- Service Training: Carrello Elevatore Linde Con Motori Elettrici E 20 / 25 / 30 Tipo 336Nessuna valutazione finoraService Training: Carrello Elevatore Linde Con Motori Elettrici E 20 / 25 / 30 Tipo 336168 pagine
- Despiece Blitz 316L 183571 B1 HP350Nessuna valutazione finoraDespiece Blitz 316L 183571 B1 HP350240 pagine
- Yale Gdp80-120dc-Gdp100dcs Serie g876 - Gdp130-160ec Serie g877Nessuna valutazione finoraYale Gdp80-120dc-Gdp100dcs Serie g876 - Gdp130-160ec Serie g877160 pagine
- Service Training: Carrello Elettrico E 20/25/30 Con Motore in Derivazione Serie 335 - 02Nessuna valutazione finoraService Training: Carrello Elettrico E 20/25/30 Con Motore in Derivazione Serie 335 - 02306 pagine
- SAVIO Scheda Tecnica Caldaia A Gas BASICA M97R 24CMNessuna valutazione finoraSAVIO Scheda Tecnica Caldaia A Gas BASICA M97R 24CM48 pagine
- Master Service Manual Product Family SL: &&rghuhylvlrqNessuna valutazione finoraMaster Service Manual Product Family SL: &&rghuhylvlrq97 pagine
- Manuale Di Assistenza IT: Orion P24Nessuna valutazione finoraManuale Di Assistenza IT: Orion P24111 pagine