Programmazione LADDER dei PLC
Esempi ed esercizi Prima parte
ITI Alessandro Volta - Sassuolo
Anno Scolastico 2009/2010
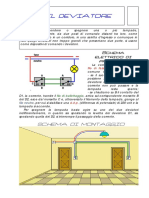
�Controllo delle aperture di porte e finestre in una stanza
Descrizione del problema e specifiche di funzionamento
Una stanza dotata di una porta di accesso (P) e due finestre (F1 e F2); sia
sulla porta che sulle finestre sono installati dei sensori in grado di rilevarne lo
stato di apertura (livello logico ALTO) o chiusura (livello logico BASSO).
Un segnalatore luminoso di allarme LA, installato presso la portineria
dell'edificio, deve segnalare, accendendosi (livello logico ALTO), il verificarsi
di almeno una delle seguenti situazioni:
P aperta e F1 aperta;
P chiusa e F1 e F2 aperte;
P aperta e F1 e F2 aperte
�Controllo delle aperture di porte e finestre in una stanza
Indicazioni per la stesura del programma LADDER
Dalle specifiche di funzionamento si ricava che la soluzione del problema richiede
l'implementazione della funzione logica combinatoria descritta dalla seguente
tabella di verit:
P
F1
F2
LA
La funzione logica data dalla seguente espressione:
LA = P F1 F2 + P F1 F2 + P F1 F2
�Controllo delle aperture di porte e finestre in una stanza
Tabella di assegnazione degli I/O e programma LADDER (PLC Omron CP1L)
Tabella assegnazione I/O
Disp.
Indirizzo
Descrizione
F1
I 0.00
Sensore finestra 1
F2
I 0.01
Sensore finestra 2
I 0.02
Sensore porta
LA
O 100.00
Lampada allarme
Programma ladder (CX - Programmer)
�Controllo delle aperture di porte e finestre in una stanza
Versione con temporizzazione del segnalatore di allarme
Le specifiche di funzionamento del sistema sono le stesse dell'esercizio
precedente: l'allarme deve dunque entrare in funzione quando si verificano le
seguenti condizioni
P aperta e F1 aperta;
P chiusa e F1 e F2 aperte;
P aperta e F1 e F2 aperte
In questo caso si richiede che il segnalatore, una volta attivato, rimanga
acceso per 10 secondi al permanere della condizione di allarme.
�Controllo delle aperture di porte e finestre in una stanza
Temporizzazione del segnalatore di allarme Programma ladder
(1) - Lo stato dei contatti viene memorizzato nell'area di lavoro W0.00 (rel interno), che si attiva quando si
verifica una condizione di allarme: come si pu notare il valore assunto da W0.00 viene riutilizzato
successivamente nel programma;
(2) - Il timer T0000 viene utilizzato per ritardare di 10s (il suo valore di settaggio vale infatti 100) lo spegnimento
del segnalatore di allarme: quando W0.00 si porta alto il timer inizia il conteggio alla rovescia, attivandosi quando
viene raggiunto il valore 0;
(3) - La lampada di allarme (uscita 100.00) viene mantenuta ON se W0.00 = 1 (condizione di allarme) e T0000
OFF; non appena il timer si attiva la lampada si spegne.
�Lampeggiatore a due luci
Il programma riportato in figura accende e spegne alternativamente, con tempi prefissati dai timer
T0000 e T0001 (in questo caso 0.5s), le lampade connesse alle uscite 100.00 e 100.01;
Il funzionamento molto semplice:
Al momento della messa in RUN del programma T0000 inizia il conteggio alla rovescia in quanto
T0001 non attivo e contemporaneamente si accende la lampada connessa a 100.01;
Quando T0000 si attiva si spegne la lampada connessa a 100.00 e si accende quella connessa
a 100.01; contemporaneamente parte il conteggio alla rovescia di T0001;
Una volta esaurito il tempo T0001 si resetta immediatamente ed il ciclo riparte da capo;
I tempi di accensione delle due luci possono essere cambiati modificando il valore di settaggio
dei timer.
�Controllo del livello del liquido in un serbatoio
Descrizione del problema e specifiche di funzionamento
Il livello del liquido contenuto nel serbatoio
rappresentato in figura viene controllato utilizzando due
sensori (A e B) ed una pompa (P): i sensori producono
uscita ALTA quando sono immersi nel liquido e BASSA
in caso contrario; la pompa P si accende con un livello
logico ALTO e si spegne in caso contrario.
Il funzionamento richiesto il seguente;
Fase di riempimento
Il serbatoio viene riempito tramite la pompa P, che
deve entrare in funzione quando il livello del liquido si
trova al disotto del sensore A (serbatoio vuoto); la
pompa deve funzionare fino a che il livello del liquido,
salendo, raggiunge il sensore B (serbatoio pieno); si
suppone inoltre che durante il riempimento non si
possa prelevare liquido dal serbatoio.
Fase di svuotamento
Una volta riempito completamente il serbatoio pu
essere svuotato; un nuovo riempimento pu essere
effettuato solamente quando il livello del liquido torna
a portarsi al disotto del sensore A (serbatoio vuoto).
�Controllo del livello del liquido in un serbatoio
Indicazioni per la stesura del programma LADDER
Dalle specifiche di funzionamento si deduce che:
La pompa deve entrare in funzione solamente quando entrambi i sensori di livello
risultano non immersi nel liquido (uscita BASSA) e si deve fermare quando
entrambi i sensori sono immersi (uscita ALTA);
Durante lo svuotamento del serbatoio la pompa non deve entrare in funzione fino
a che il serbatoio non risulta completamente vuoto (sensori A e B con uscita
BASSA).
Tabella degli I/O per il controllo con PLC Omron CP1L
Disp.
Indirizzo
Descrizione
I 0.00
Sonda di livello A
I 0.01
Sonda di livello B
O 100.00
Pompa di riempimento
�Controllo del livello del liquido in un serbatoio
Programma LADDER per CPL1 Omron (CX - Programmer)
(1) La pompa deve essere accesa se A = 0 e B = 0 (serbatoio completamente vuoto) OPPURE
deve essere mantenuta accesa anche quando gi in funzione ed il livello del liquido compreso
fra A e B (A = 1 e B = 0);
(2) La pompa deve essere spenta se il serbatoio completamente pieno (A = 1 e B = 1)
OPPURE se, durante lo svuotamento il livello del liquido compreso fra A e B (A = 1 e B = 0): si
ricordi che le specifiche di funzionamento impongono che la pompa sia sempre spenta durante la
fase di svuotamento.
�Serbatoio con pompa di riempimento e valvola di scarico
Descrizione del problema e specifiche di funzionamento
In figura rappresentato un serbatoio, nel quale il livello del
liquido controllato tramite due sensori A e B (uscita alta se
immersi nel liquido e bassa in caso contrario), una pompa di
riempimento P ed una valvola di scarico V.
Il funzionamento del sistema definito dalle seguenti
specifiche:
Fase di riempimento
Il serbatoio viene riempito tramite la pompa P, che
deve entrare automaticamente in funzione quando il
livello del liquido si trova al disotto del sensore A
(serbatoio vuoto); la pompa deve funzionare fino a
che il livello del liquido, salendo, non raggiunge il
sensore B (serbatoio pieno); durante questa fase non
si pu prelevare liquido dal serbatoio e quindi non
deve essere possibile azionare la valvola di scarico.
Fase di svuotamento
Una volta terminata la fase di riempimento possibile
prelevare liquido dal serbatoio azionando la valvola di
scarico V; non appena il livello scende al disotto del
sensore A (serbatoio vuoto) la valvola di scarico V
deve essere chiusa e non deve pi essere possibile
riaprirla fino a che il serbatoio non si nuovamente
riempito.
�Serbatoio con pompa di riempimento e valvola di scarico
Indicazioni per la stesura del programma LADDER
In base alle specifiche assegnate si ha:
La valvola di scarico non pu essere azionata durante il riempimento del serbatoio, vale a
dire se la pompa P in funzione;
Quando la pompa P spenta la valvola di scarico attiva se:
Il serbatoio pieno (A=1 e B=1) e il suo comando di azionamento ON;
OPPURE
Il suo comando di azionamento ON e il livello del liquido sceso al disotto del sensore
B (B=0) e rimane al disopra del sensore A (A=1).
Tabella degli I/O per il controllo con PLC Omron CPL1
Disp.
Indirizzo
Descrizione
I 0.00
Sonda di livello A
I 0.01
Sonda di livello B
CVS
I 0.02
Comando valvola di
scarico
O 100.00
Pompa di riempimento
VS
O 100.01
Valvola di scarico
�Serbatoio con pompa di riempimento e valvola di scarico
Programma LADDER per PLC Omron CPL1
La comprensione del funzionamento del programma (abbastanza simile a quello del caso
precedente), lasciata allo studente come esercizio.
�Comando Marcia Arresto di un motore elettrico
Comando di un teleruttore (rel) con autoritenuta
Specifiche di funzionamento
Il funzionamento di un motore elettrico viene comandato tramite due pulsanti
di tipo NA (normalmente aperti), P1 e P2, che determinano lo stato di
eccitazione o diseccitazione del teleruttore che collega il motore alla linea
elettrica che lo alimenta:
P1 Marcia
P2 Arresto
Lo stato di funzionamento del motore deve essere segnalato mediante due
lampade spia L1 ed L2 poste sul quadro di comando dello stesso:
L1 (Verde) Motore in marcia
L2 (Rossa) Motore fermo
�Comando Marcia Arresto di un motore elettrico
Comando di un teleruttore (rel) con autoritenuta
Indicazioni per la scrittura del programma ladder
Per poter eccitare o diseccitare un teleruttore tramite pulsanti NA occorre
tenere presente che lo stato di chiusura del contatto degli stessi
temporaneo, ossia persiste fino a che il pulsante stesso rimane premuto;
E' quindi necessario fare in modo che:
il teleruttore si ecciti quando viene premuto P1 (Marcia) e rimanga in tale
stato anche quando lo stesso viene rilasciato;
Il teleruttore si disecciti quando viene premuto P2 (Arresto) e rimanga in
tale stato quando lo stesso viene rilasciato;
Il funzionamento descritto sopra si ottiene mediante il cosiddetto comando
con autoritenuta, illustrato nel diagramma ladder della pagina seguente
�Comando rel con autoritenuta
Programma ladder
Tabella assegnazione I/O
Disp.
Indirizzo
La funzione di autoritenuta viene ottenuta mediante il
contatto Q 100.00 posto in parallelo a P1: esso infatti si
chiude quando la bobina 100.00 ON, mantenendo la
circolazione della corrente nel rung anche quando P1
viene rilasciato;
Descrizione
P2
I 0.00
Pulsante arresto
P1
I 0.01
Pulsante marcia
TMT
O 100.00
Teleruttore motore
L1
O 100.01
Lampada motore ON
L2
O 100.02
Lampada motore OFF
(1) - Quando viene premuto il pulsante P1 la bobina
connessa all'uscita 100.00 si eccita (P2 un contatto NC,
quindi la corrente circola se esso non viene azionato) ed il
motore si avvia;
Premendo il pulsante P2 si provoca la diseccitazione della
bobina e quindi l'arresto del motore (anche il contatto Q
100.00 si apre e la corrente non circola pi nel rung);
L'accensione delle lampade spia che segnalano lo stato
del motore comandata dai due rung successivi (2) e (3).
Autoritenuta
2
3
�Sistema contapezzi con nastro trasportatore
Descrizione del sistema e specifiche di funzionamento
Nel
sistema
contapezzi
illustrato
schematicamente nella figura riportata a fianco
sono presenti:
Le specifiche di funzionamento sono le seguenti:
Un nastro trasportatore azionato da un
motore M;
Una fotocellula F;
Due lampade di segnalazione, L1 e L2, di
colore rispettivamente VERDE e ROSSO;
Due pulsanti, START e STOP, non illustrati
in figura.
Premendo il pulsante START si mette in moto il nastro trasportatore e si accende la lampada di
segnalazione L1 (VERDE);
I pezzi da contare vengono posti sul nastro: ogni volta che uno di essi passa davanti alla
fotocellula deve essere contato;
Quando il conteggio dei pezzi raggiunge il valore 9 il nastro deve essere fermato e si deve
accendere la lampada di segnalazione L2 (ROSSO);
Il nastro pu essere fermato in qualunque momento premendo il pulsante STOP: in questo caso
lo si pu far ripartire premendo nuovamente il pulsante START, ma il conteggio dei pezzi deve
riprendere da dove era stato interrotto.
Si suppone che:
La fotocellula F fornisca in uscita un valore logico ALTO quando il pezzo passa davanti ad essa
e BASSO in caso contrario;
Il motore e le lampade di segnalazione si attivino con un valore logico ALTO;
I pulsanti START e STOP siano di tipo NA.
�Sistema contapezzi con nastro trasportatore
Osservazioni e note per la stesura del programma ladder
Il comando di avvio e arresto del motore attraverso i due pulsanti START e STOP di tipo
NA deve essere fatto mediante un rel con autoritenuta;
Lo stato del nastro trasportatore dipende inoltre dal numero di pezzi contati dal sistema:
in base alle specifiche assegnate infatti il nastro si deve fermare quando tale numero
raggiunge il valore 9;
Per il conteggio dei pezzi si utilizzer un contatore a decremento, il cui blocco funzionale
viene riportato di seguito:
Il Set Value S viene impostato a 9;
All'ingresso Count Input viene
collegata la fotocellula che rileva il
passaggio del pezzo sul nastro.
Per quanto riguarda l'ingresso di Reset in base alle specifiche di funzionamento
previste dal sistema bisogna tenere presente che:
Se il nastro viene fermato prima che siano stati contati 9 pezzi il contatore NON
DEVE ESSERE RESETTATO: al successivo riavvio infatti il conteggio deve
riprendere dal punto in cui stato interrotto;
Se il nastro viene riavviato dopo il passaggio di 9 pezzi il contatore DEVE
ESSERE RESETTATO, in modo da poter effettuare un nuovo ciclo di conteggio.
�Sistema contapezzi con nastro trasportatore
Programma Ladder
2
3
Disp.
Indirizzo
Descrizione
START
I 0.00
Pulsante START
STOP
I 0.01
Pulsante STOP
FC
I 0.02
Fotocellula contapezzi
LGR
O 100.00
Lampada VERDE
LRD
O 100.01
Lampada ROSSA
MOT
O 100.02
Motore nastro
CNT_PE
ZZI
C0000
Contatore pezzi
(1) Il comando di avvio e arresto del nastro effettuato mediante i due pulsanti START e STOP con
autoritenuta della bobina 100.02 (comando motore); il contatto NC C0000, riferito al contatore CNT_PEZZI,
mantiene ON il motore fino a che il conteggio non terminato. Il rung termina con 3 bobine in parallelo che
comandano il motore, la lampada spia VERDE (motore ON) e quella ROSSA (motore OFF);
(2) L'ingresso Count Input del contatore collegato alla fotocellula FC che rileva il passaggio dei pezzi su
nastro;
(3) - L'ingresso Reset Input provoca il reset del contatore solamente nel caso in cui il motore venga fatto ripartire
dopo l'arresto determinato dal conteggio di 9 pezzi: tale ingresso infatti va alto solo se START = 1 (comando
avvio nastro) e C000 = 1 (contapezzi ON per raggiungimento termine conteggio); se il nastro viene fermato
prima del termine del conteggio si ha C0000 = 0 e non si avr il reset del contatore al successivo riavvio (il
conteggio riparte dal punto in cui stato interrotto)
�Sistema contapezzi con nastro trasportatore
Programma Ladder Seconda versione
Il programma del tutto simile al precedente, con la sola differenza che in questo
caso il conteggio dei pezzi viene effettuato solamente con il nastro trasportatore in
movimento;
Il contatto 100.02 inserito in serie alla fotocellula (FC I 0.00), infatti, fa in modo che
il conteggio dei pezzi venga effettuato solo con il motore ON, evitando cos
conteggi indesiderati a nastro fermo.
�Sistema contapezzi con nastro trasportatore
Sistema per pezzi di due diverse altezze
Il sistema illustrato schematicamente in figura deve
contare i pezzi di due diverse altezze (H1 e H2) che
vengono via via posti sul nastro trasportatore.
Le specifiche di funzionamento sono le seguenti:
Il nastro trasportatore si mette in moto premendo il
pulsante START e si arresta premendo il pulsante
STOP; lo stato del nastro deve essere segnalato
mediante l'accensione delle lampade LGR (nastro in
movimento) o LRD (nastro fermo);
Le fotocellule F1 ed F2 rilevano l'altezza dei pezzi,
fornendo uscita ALTA quando sono oscurate e BASSA in
caso contrario; i pulsanti START e STOP sono NA;
I pezzi, che possono essere solamente di due altezze
diverse (H1 e H2) vengono posti sul nastro e passano
davanti alla coppia di fotocellule per essere contati;
Il conteggio dei pezzi deve essere fatto separatamente per le due diverse tipologie; il nastro
trasportatore deve essere fermato quando il numero di pezzi di tipo H1 oppure quello dei pezzi di
tipo H2 raggiungono il valore 9;
Le lampade LH1 e LH2 segnalano il raggiungimento del numero massimo di pezzi previsto per
ciascuna delle due tipologie;
Il nastro trasportatore pu essere fermato in qualunque momento premendo il pulsante STOP; in
tal caso il conteggio dei pezzi deve ripartire dal punto dal quale stato interrotto.
�Sistema contapezzi con nastro trasportatore
Sistema per pezzi di due diverse altezze Note per la scrittura del programma
Tabella assegnazione I/O
Disp.
Indirizzo
Descrizione
START
I 0.00
Pulsante START
STOP
I 0.01
Pulsante STOP
FC1
I 0.02
Fotocellula F1
FC2
I 0.03
Fotocellula F2
LGR
O 100.00
Lampada VERDE
LRD
O 100.01
Lampada ROSSA
MOT
O 100.02
Motore nastro
LH1
O 100.03
Lampada H1
LH2
O 100.04
Lampada H2
CNT_H1
C0000
Contatore pezzi H1
CNT_H2
C0001
Contatore pezzi H2
Il comando del motore mediante i pulsanti START e
STOP viene fatto con un rel ad autoritenuta;
L'arresto del nastro trasportatore deve verificarsi:
Quando viene premuto il pulsante STOP;
Quando
almeno uno dei contatori dei pezzi
raggiunge il valore massimo previsto;
Per effettuare il conteggio dei pezzi occorre tenere
presente che:
I
pezzi di altezza H1 oscurano entrambe le
fotocellule (F1 =1 e F2 = 1);
I pezzi di altezza H2 oscurano solamente la
fotocellula F1 (F1 = 1 e F2 = 0);
I contatori vanno resettati solo se il nastro
trasportatore viene fatto ripartire in seguito al
raggiungimento del valore massimo previsto per
almeno una delle tipologie di pezzi: solo in questo
caso infatti deve iniziare un nuovo ciclo di conteggio
degli stessi;
Occorre infine tener presente che, nel caso in cui si
conta un pezzo di tipo H1 le due fotocellule devono
passare da 00 a 11: se per un non perfetto
allineamento delle stesse commuta prima F1 e poi F2
(00 01) si avrebbe un conteggio errato sui pezzi di
tipo H2.
�Contapezzi a 2 altezze - Programma Ladder
(1) Il comando del nastro
trasportatore viene fatto tramite un
rel con autoritenuta;
(2) Il reset dei contatori, fatto
tramite il valore assunto dall'area di
lavoro W0.00, viene effettuato
solamente quando viene dato il
comando START in seguito al
raggiungimento del valore massimo
di conteggio di almeno una delle due
tipologie di pezzi;
(3) Per ovviare all'inconveniente del
disallineamento
delle
fotocellule
viene introdotto un ritardo alla lettura
del loro stato tramite il timer T0000:
esso infatti viene attivato quando
almeno una delle fotocellule si porta
alta;
(4) Quando T0000 ha esaurito il
tempo (in questo esempio esso vale
1s) viene effettuata la lettura dello
stato
delle
fotocellule
con
decremento del valore del contatore
relativo all'altezza del pezzo rilevata:
in questo modo si permette al pezzo
di posizionarsi correttamente davanti
alla coppia di fotocellule. Si noti come
la lettura delle fotocellule influenza i
contatori
solo
se
il
nastro
trasportatore in movimento (motore
ON).
(5) Le due lampade H1 e H2
segnalano il fine conteggio dei pezzi.