Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
La Ripartizione Dei Carichi - Bozza 1
Caricato da
DonaldDuck1985Titolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
La Ripartizione Dei Carichi - Bozza 1
Caricato da
DonaldDuck1985Copyright:
Formati disponibili
PROGETTODI
STRUTTURE
LARIPARTIZIONEDEICARICHINEGLIEDIFICI
PaolacciFabrizio
UniversitdegliStudiRomaTre
FacoltdiIngegneria
INDICE
1. Introduzione
2. Laripartizionedeicarichiverticali
2.1. Laripartizionedeicarichiverticalisulletravi
2.1.1. Ilmetododelleareediinfluenza
2.1.2. Ilcomportamentoapiastradelsolaio
2.2. Laripartizionedeicarichiverticalisuipilastri
2.2.1. Modelliisostatici:Ilmetododelleareediinfluenza
2.2.2. Modelliiperstatici:travecontinua
2.2.3. Modelliiperstatici:iltelaioparzialeetotale
2.2.4. Linfluenzadelladeformabilitassialedeipilastri
3. Laripartizionedeicarichiorizzontali
3.1. Introduzione
3.2. Ilcomportamentodellestrutturepiane
3.2.1. Glischemistrutturalitipici
3.2.2. Lestruttureintelaiate
3.2.2.1. Isistemiarittipendolari(struttureinacciaio)
3.2.2.2. IsistemiMRF(sheartype,travideformabili,etc..)
3.2.3. Ilcomportamentodellepareti
3.2.3.1. Leparetipiene
3.2.3.2. Lepareticonaperture(metodianaliticienumerici)
3.2.4. Isistemitelaioparete
3.3. Ilcomportamentodellestrutturetridimensionali
3.3.1. Laripartizionedelleazioniorizzontaliinedificimonopianoadelementidiscreti
3.3.2. Ladisposizioneinpiantadeglielementiirrigidenti
3.3.3. Lamodellazionedeinucleiscaleeascensori
1. Introduzione
Ilprogettodiedificiconstrutturaintelaiata,comequelloillustratoinfigura1siarticolain
diversefasi,ognunadellequalihaunpesorelativodifferente.
Particolarmente importante la fase iniziale del progetto, ossia lideazione della
struttura, la quale caratterizzata da un alto grado di soggettivit da parte del progettista.
Infatti,eglidevenecessariamenteinterpretareleesigenzefunzionalietradurleinunamaglia
strutturale dal buon funzionamento statico e che sia contemporaneamente in grado di
realizzarelaformapensataperledificio.
Figura 1.1 La maglia strutturale di un
edificio in c.a. e i percorsi di carico
Figura 2.1 Effetto torsionale in un
edificio
La scelta degli elementi e della loro disposizione allinterno della maglia strutturale
dipendedamolteplicifattori(tipologiadelleazioniesterne,materialicostituentiglielementi
strutturali, vincoli architettonici, etc). Tale scelta ha una influenza diretta sul percorso dei
carichi allinterno della struttura. Per tale motivo opportuno che il progettista sia ben
consapevole delle conseguenze sul buon funzionamento statico della struttura che una
disposizionedielementiharispettoadunaltra.
Ad esempio, la parete presente nella struttura di figura 1 rappresenta, come si pu
facilmente intuire, un aiuto nei confronti delle azioni orizzontali in direzione trasversale, in
quantolasuaelevatarigidezzapermettediassorbirneunaelevataquantit,avantaggiodei
pilastri, che conseguentemente vengono meno sollecitati. Di contro, la sua posizione
eccentrica potrebbe costituire un peggioramento delle condizioni dei pilastri lontani dalla
pareterispettoalcasoincuilaparetenoncifosse.Infattipoichlaparetecostituisce,come
verr meglio spiegato in seguito, un attrattore per le reazioni strutturali orizzontali
delledificio, leccentricit tra azioni e le reazioni orizzontali produce, oltre alla traslazione,
una torsione delledificio con un possibile incremento di sollecitazioni nei pilastri lontani
dallaparete.
E chiaro dunque che la scelta degli elementi e della loro disposizione in pianta e in
elevazione di un edificio deve essere attentamente valutata alla luce delle possibili
conseguenzecheessapuaveresullasicurezzastrutturale.
In quanto segue si vogliono illustrare alcuni principi guida sulla scelta di modelli
semplificati, utilizzando come mezzo espositivo quello dei percorsi di carico, che risulta
particolarmente efficace, a parere dello scrivente, per stimolare i progettisti ad una scelta
piragionataeconsapevoledellastruttura,cheoggivienepurtropposostituitadallillusione
che i programmi di calcolo possano rendere superflue alcune necessarie operazioni
progettuali.
Occorreaggiungerechelanormativaattualeprevedeunanecessariaverificadeimodelli
di calcolo che risulta essere particolarmente agevolata nel caso siano ben chiare le scelte
strutturali e le relative conseguenze. A tal proposito, lo studio presentato nel seguito ha
comeulterioreobiettivoproprioquellodifornireindicazionisulcomportamentostrutturale
conlausiliodimodellisemplicichepossanoesserefacilmenteutilizzatiperlavalidazionedel
calcolostrutturalerealizzatomediantecalcolatoreelettronico.
Per comodit espositiva verr dapprima trattato il caso della ripartizione dei carichi
verticali, per poi proseguire con il tema della ripartizione dei carichi orizzontali, al fine di
suggerireopportunesceltesulladisposizioneinelevazioneeinpiantadipilastri,pareti,setti
enucleiscaleeascensore.
2. Laripartizionedeicarichiverticali
Una struttura generalmente destinata al trasferimento delle azioni esterne al terreno
sul quale fondata. Un categoria di carichi particolarmente rilevante, in quanto di natura
quasipermanente,quelladeicarichiverticali,ingenererappresentatidaipesipropridegli
elementi strutturali (solai, travi, pilastri, etc) o da carichi variabili che dipendono dalla
destinazionedusodelledificio(civileabitazione,scale,balconi,etc).
Lemodalitconlaqualeicarichiverticalisidistribuisconoallinternodellastrutturasono
legateallaseguentecatenadiripartizione:
Infattiilsolaioilprimoelementoconilqualeicarichiverticaliinteragiscono.Sipensiad
esempio al peso dei sovraccarichi accidentali, come il peso delle persone o il peso dei
tramezzi.
Figura2.1Catenadiripartizionedeicarichiverticali
Infattiilsolaioilprimoelementoconilqualeicarichiverticaliinteragiscono.Sipensiad
esempio al peso dei sovraccarichi accidentali, come il peso delle persone o il peso dei
tramezzichepoggianosullestradossodelsolaio.
Analizziamooralaprimapartedellacatena:solaiotravi.Icarichicheagisconosulsolaio
sono generalmente di natura distribuita, spesso superficiale o lineare, anche se non
SOLAIOTRAVIPILASTRI,SETTIFONDAZIONI
SOLAIO
TRAVE
PILASTRO
mancanoesempidicarichiconcentrati.Occorrevalutarelamodalitditrasferimentoditali
carichisulletravi.
Un approccio spesso seguito in sede di progetto quello cos detto della larghezza
dinfluenzadelletravi.Inpraticasiimmaginacheilpesodistribuitosullasuperficiedelsolaio
sitrasferiscaalletraviproporzionalmenteadunalarghezzapariallasommadelleduesemi
lucidelsolaiocheinteragisceconlatrave,Figura2.2.Intalmodoilcaricosulletraviancora
distribuito,ancheselinearmente.
Figura2.2Piantadiunimpalcatoinc.a.Lucedinfluenzadiunatrave
Tale approccio giustificato dallipotesi di comportamento monodirezionale del solaio
(vedifigura2.1)sullabasedellaqualesiimmaginachelasingolacampatascarichiinmisura
egualeilpropriopesosulletravidiappoggio.
Il modello di calcolo che associato al metodo appena illustrato quello di trave
semplicemente appoggiata. Le singole campate del solaio, pensato a comportamento
monodimensionale,vengonoschematizzatecometravisemplicementeappoggiate.
L1
L2
L=(L1+ L2)/2
Figura2.3Ilmodelloassociatoalmetododellalarghezzadinfluenza(modelloisostatico)
Gli appoggi sono rappresentati dalle travi, considerate evidentemente indeformabili,
essendogliappoggibilaterali.
Con riferimento ad un metro di larghezza di solaio, il peso ad esso attribuibile pari
proprio al peso per unit di superficie p. Le reazioni agli appoggi costituiscono il carico
trasferito dal solaio alle travi. Cos ad esempio, lappoggio intermedio avr una reazione, a
metrolineareparia
p
t
= p
I
1+
I
2
2
che corrisponde proprio al peso distribuito linearmente calcolabile col metodo della
larghezzadinfluenza.
Il metodo della luce dinfluenza delle travi presenta delle evidenti limitazioni legate
essenzialmenteaduefattori:
a) Ilcomportamentodelsolaiobidimensionale
b) Il modello ad esso associato non del tutto soddisfacente per il fatto che
linterazioneflessionaletrasolaioetravivienedeltuttotrascurata.
Per ovviare a questi inconvenienti, pur mantenendo viva lipotesi di comportamento
monodimensionale del solaio, si pu arricchire il modello di figura 4 introducendo la
continuit flessionale del solaio. Il modello pi semplice che risponde a tali requisiti il
modelloditravecontinua.
Figura2.3Ilmodelloditravecontinuadelsolaio(modelloiperstatico)
p
t
p
p
t
p
Per semplicit, facciamo riferimento al caso di figura 2.2, immaginando che le campate
delsolaioadiacentelatraveabbianouguallucepariadL.Intalcasoilmodellodegenerain
un modello di trave incastroappoggio. La reazione strutturale p
t
ossia il carico linearmente
distribuito da attribuire alla trave in tal caso pari a 1.25 pL, con un incremento del 25%
rispetto al risultato ottenibile col metodo della larghezza dinfluenza secondo il quale il
caricodistribuitosullatravevarrebbeinvecepL.
Alcontrario,sugliappoggidiestremitilcaricodaattribuireallatravevienesottostimato
rispettoalmetododellalarghezzadinfluenza,essendolareazioneverticaleparia0.375pL.
Il modello di trave continua, stante lindeformabilit verticale delle travi, modifica
fortemente la distribuzione del carico verticale dal solaio alla trave, della quale occorre
valutarne lattendibilit. A tale scopo si pu affinare il modello introducendo un ulteriore
modificapertenercontodellacorrettainterazionetrasolaioetravidibordo.
Le travi, come noto, possiedono una rigidezza torsionale elevata che potrebbe
influenzare la distribuzione del taglio nel solaio e conseguentemente la ripartizione dei
carichisulletravi.
Consideriamo ancora il modello di figura 2.3. Modifichiamolo introducendo la rigidezza
torsionalek
t
delletravidibordorappresentatadamollerotazionalidirigidezzak
t
(figura6).
Figura6Modificadelmodelloditravecontinuadelsolaio
Se la rigidezza k
t
fosse infinita, il modello degenererebbe in due travi doppiamente
incastrate, le quali dal punto di vista della reazione strutturale sugli appoggi sarebbero
equivalentialmodelloditraveappoggiata.
In realt la rigidezza torsionale finita e il modello presenta un comportamento
intermedio tra quello di trave incastroappoggio e quello di trave doppiamente incastrata.
Ci che accade che la reazione dellappoggio interno diminuisce rispetto al modello di
figura 5, mentre la reazione agli appoggi destremit aumenta. Maggiore la rigidezza k
t
e
p
k
t
maggiore e la somiglianza del modello cos modificato con il metodo della larghezza
dinfluenza.
Dalpuntodellaripartizionedeicarichitalemodellointermediodovrebberappresentare
una soluzione non troppo lontana da quella reale, che evidentemente risente di ulteriori
fattorifinquitrascurati,comeadesempioilcomportamentobidimensionaledelsolaio.
Figura7Comportamentobidimensionalediunsolaio
Il comportamento a piastra del solaio produce infatti una ulteriore variazione della
distribuzionedeicarichitrasolaioetravi.
Infatti,intalcasolaripartizionedeicarichiseguelaformaindicatainfigura8.
Figura8Comportamentoapiastradelsolaio:ripartizionedeicarichi
Ilcaricop
t
daconsiderareripartitosulletravievidentementenoncostantemavariabile
linearmente.Occorreperosservarecheilvaloremassimodelcaricodistribuitosulletravi
10
pari a quello suggerito dai modelli monodimensionali. Dunque lerrore che si commette
nellusodimodelliditravipiuttostochedimodellidipiastraafavoredisicurezza.Pertale
motivo luso dei modelli semplici come quelli monodimensionali ancora molto diffuso e
lapprossimazionedelmetododellalarghezzadinfluenzapicheaccettabile.
Il ragionamento fin ora seguito pu essere ripetuto anche per la parte della catena di
ripartizionedeicarichifratraviepilastri.
Consideriamoinfattiungenericotelaiopianoapparteneteallastrutturadifigura3,eper
semplicitsiconsiderinolelucieguali.
Figura8ModellodelTelaioeripartizionesecondoilmetododellalarghezzadinfluenza
Ilmetododellalarghezzadinfluenzaprevedeancheinquestocasounmodelloisostatico
che rappresentato in figura 8. Le travi sono appoggiate ai pilastri ai quali trasmettono il
caricoinproporzioneallaloroluceL.Adesempioperilpilastrocentralelosforzonormaleal
pianoterravarr
N
2
= (p
1
+p
2
)I
Un modello pi raffinato prevede la continuit delle travi per la quale il modello di
riferimento quello di trave continua su pi appoggi, rappresentati dai pilastri, considerati
indeformabiliassialmente.
Come per il caso di ripartizione solaiotrave, lo sforzo assiale del pilastro centrale alla
basedelledificioincrementatodel25%rispettoaquantoprevistodalmodelloisostatico
L L
p
2
p
1
11
N
2
= 1.2S(p
1
+p
2
)I
mentreperipilastrilateralilosforzonormalediminuitodel25%
N
1,3
= u.S7S (p
1
+p
2
)I
Il modello di trave continua potrebbe cadere in difetto nel caso di campate di piccola
lucechealteranosensibilmenteladistribuzionedeicarichisuivincoli.Adesempiolatravedi
figura 9, per il fatto che ha la campata di sinistra molto pi piccola di quella di destra
presenta una reazione nel pilastro di sinistra di segno negativo. Tale risultato mostra come
lutilizzodelmodelloditravecontinuanonsemprefisicamenteaccettabile.
Per rendere il modello pi realistico si osservi che il forte impegno rotazionale
dellestremitdisinistradellatravedovrebbeinrealtimpegnareflessionalmenteilpilastro,
chenelmodelloditravecontinuasoggettosoloasforzonormale.
Figura9Modelloditravecontinuaconcampatapiccola
Adesempioperunalucedisinistraparia2metrieunalucedidestrapari6meuncarico
di20kN/milmomentoflettenteelereazioniagliappoggisonoindicatiinfigura10.Daessa
sievincecomeglisforzinormalisuipilastricentraleedisinistrasianoevidentementevalutati
inmanieraerrata.
Momento Flettente Taglio Reazioni Vincolari
Figura 10 Diagrammi e reazioni di una trave con campata piccola
p
t
p
12
In virt di tale osservazione, un modello pi raffinato del precedente potrebbe essere
quelloillustratoinfigura11,(modelloatelaioparziale),nelqualesitieneanchecontodella
rigidezza flessionale dei pilastri. Esso deriva dallosservazione dellandamento dei momenti
flettentisullinterotelaio,einparticolaredeipuntidinullodeimomentiflettentisuipilastri,
neiqualiilvincolodicontinuitpuesseresostituitodaunacerniera.
Figura 11 Modello a telaio parziale
Conriferimentoallesempioprecedenteaggiungendoanchelaporzionedipilastricheva
dalpuntodinullodelmomentoalnodotravepilastro,sipuosservarecomelavalutazione
dellosforzonormalesuipilastridiventipiragionevole(Figura12).
Momento Flettente Taglio Sforzo Normale
Figura 12 Caratteristiche della sollecitazione del telaio parziale
Ci confermato dai risultati sul modello completo del telaio mostrati in figura 13. Si
evince inoltre come le sollecitazioni sulle travi risultano essere pi attendibili delmodello a
travecontinua.
13
Momento Flettente Taglio Sforzo Normale
Figura 13 Caratteristiche della sollecitazione del telaio completo
Inpresenzaditelaiconunnumeroelevatodicampate,lezonecentralisonoquelleperle
quali il modello di trave continua pu ritenersi ancora sufficientemente accurato, sia per la
valutazione delle caratteristiche della sollecitazione delle travi, sia per la ripartizione dei
carichi verticali sui pilastri, per la quale anche il metodo della lunghezza diinfluenza pu
essere proficuamente utilizzato. Lattendibilit dei modelli pi semplici si perde solamente
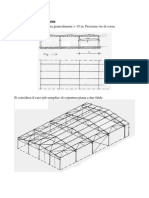
nelle zone di estremit delle travi. Ad esempio la Figura 14 mostra i risultati in termini di
sollecitazioni di un telaio a 2 piani con altezza interpiano di 3 m e 10 campate di 6 m
ciascuna. Le travi sono sollecitate da un carico uniformemente ripartito di 20 kN/m. Nelle
campatecentraliirisultatisonosostanzialmenteinaccordoconquellidiunatravecontinua
con10campate,mentredivergononellezonediestremit.
Momento Flettente Sforzo normale
Figura 14 Telaio a molte campate - caratteristiche della sollecitazione
I risultati fin qui esposti possono essere estesi anche a telai con un numero elevato di
pianiconlavvertenzachelemaggiorideviazionisiavrannonelprimoenellultimopianoper
la presenza di vincoli che alterano la distribuzione delle sollecitazioni: lincastro in
fondazione sposta il punto di nullo del momento sul pilastro verso il basso per cui i pilastri
delprimopianorisultanopideformabilidiquellideipianiintermedidoveinveceilpuntodi
14
nullo del momento posto generalmente a met altezza del pilastro; a causa dellassenza
delpilastrodelpianosuperiorelultimopianopresentaanchessovincolimenorigididiquelli
dei piani intermedi. Un esempio illustrato in figura 15 dove illustrato landamento del
momentoflettenteperiltelaiodifigura13maoracon10piani.
Ultimi due piani
Piani intermedi
Primi due piani
Figura 15 Telaio a molti piani - caratteristiche
della sollecitazione
Le precedenti osservazioni possono essere infine estese anche al caso di telai
tridimensionaliinquantolarigidezzatorsionaledelletravi,generalmentenonmoltoelevata,
non in grado di influenzare in maniera rilevante il comportamento flessionale dei singoli
telai,chesideformanosostanzialmenteognunoindipendentementedallaltro.
Figura 16 Metodo delle aree dinfluenza per la determinazione dello sorzo normale nei pilastri
P
pij
=peso pilastro
Wij = peso piano
n=numero piani
15
In particolare, per la valutazione dello sforzo normale nei pilastri ancora valido il
metodo delle lunghezze dinfluenza, denominato nel caso specifico metodo delle aree
dinfluenza in quanto riguarda pi travi che convergono nel pilastro e dunque unarea
piuttosto che una lunghezza. La figura 16 mostra come valutare larea dinfluenza di un
pilastro.
Da quanto esposto fin ora si pu possono trarre alcune significative conclusioni
sullutilizzo di metodi e modelli semplificati per una corretta valutazione delle modalit di
ripartizionedeicarichiverticalitraglielementiresistentidiunastruttura:
1) Il metodo delle zone dinfluenza generalmente accettabile per la valutazione dello
sforzo normale nei pilastri, almeno in fase di predimensionamento, sia nel caso di telai
piani che nel caso di telai tridimensionali. Occorre per modificare la zona dinfluenza
nellezoneterminalideitelaieinparticolareneipilastridibordoeneipilastriadiacenti.
Alcuni autori hanno suggerito coefficienti correttivi delle aree di influenza per tener
conto di una corretta distribuzione dei carichi verticali tra solai e travi e tra travi e
pilastri.
InparticolareperunacorrettavalutazionedelleareedinfluenzadeipilastriMihelbradt
etal.(BIBLIO)suggerisconodiadottareiseguenticoefficienti.
Tabella1.Coefficienticorrettividelleareedinfluenza
Pilastro Coefficiente
interno 1
di bordo 0.9
primo dopo quello di bordo 1.1
dangolo 0.8
2) E possibile utilizzare il modello di trave continua per la valutazione delle sollecitazioni
neisolaiapattodiapportareopportunemodificheneivincolidiestremitinmanierada
tenercontodellecondizionidibordochemodificanoladistribuzionedellesollecitazioni
negli elementi. Generalmente sufficiente applicare un momento negli appoggi di
bordo pari a pL
2
/(2024) al modello di trave continua (p, L=luce e carico campata di
bordo)perottenererisultatiattendibili.
16
3) Perlavalutazionedellesollecitazionenelletravipossibileutilizzareilmodelloditrave
continua, anche se il modello di telaio parziale da preferire, in quanto mette
automaticamente in conto linfluenza della deformabilit flessionale dei piastri sulle
sollecitazionedellatrave.
4) La costruzione di modelli di telaio parziale dipende da una corretta valutazione dalla
distanza tra il nodo travepilastro e il punto di nullo del momento. Tale distanza pu
essere scelta pari ad h/2 per le travi dei piani intermedi, mentre per il piano primo e
ultimo deve essere necessariamente aumentata. Una misura ragionevole pu essere
assuntaparia2/3h.
17
3. Laripartizionedeicarichiorizzontali
Un edificio caratterizzato da una struttura portante il cui modello di calcolo da
adottare per la valutazione delle sollecitazioni dipende dal grado di accuratezza richiesta
allanalisi.
Con particolare riferimento agli effetti dei carichi orizzontali su edifici intelaiati sono
possibili3livellidimodellazioneviaviapisofisticati:
Modellomonodimensionale
La struttura viene sostituita da un elemento di trave monodimensionale sul quale a
diverse altezze (rappresentati i diversi piani) sono applicate le forze esterne (orizzontali e
verticali).Unmodellocosfattopuessereutilizzatoperavereunideasullarispostaglobale
delsistemacomeadesempioglispostamentidipianoetaglidipiano.Essononpuessere
utilizzatonelcasocifosselesigenzadivalutarelesollecitazionideisingolielementi.
Figura17Modellimonodimensionale
Modellobidimensionale(2D)
Se ledificio presenta un comportamento di tipo simmetrico lanalisi della sua risposta
puessereridottaallanalisidellarispostadialcunisuoielementi.Nelloschemadistruttura
intelaiatasiscegliegeneralmenteuntelaiopianonelladirezionedisollecitazione.
Tale modello, pur nella sua semplicit, permette di avere un certo grado di dettaglio
delle sollecitazioni dei singoli elementi strutturali sufficiente per valutare la sicurezza
strutturale.Imodellibidimensionalisonostaticosdiffusichealcuniautoriinpassatohanno
spostamento
tagliodibase
18
proposto metodi di soluzione ad hoc (per la verit assai laboriosi ma efficaci) per
comportamentolinearedellemembrature.
Figura18Modellobidimensionale
Con lavvento del calcolo automatico delle strutture questi modelli sono stati e sono
tuttora utilizzati anche per la valutazione della risposta di telai a comportamento non
lineare.
Modellotridimensionale(3D)
E di fatto il modello pi accurato. Permette di modellare il comportamento di edifici
anche estremamente irregolari, sia in pianta sia in elevazione. Si consideri ad esempio un
edificio con la pianta indicata in seguito. Se si applicassero delle forze orizzontali si pu
immaginarefacilmentelapresenzadiunrotazionedelgenericopiano,questoperlevidente
differenzadicomportamentodeitelaidisinistradaquellididestra(iprimisonopirigidie
quindisideformanoinmisuraminore).
Figura18ModelloTridimensionale
sollecitazione
19
Per la valutazione delle forze che competono ai singoli telai, non per sufficiente
distribuire lazione esterna in funzione della rigidezza globale dei telai stessi, ma occorre
necessariamente adottare un modello trdimensionale, che metta in conto anche
laccoppiamentorototraslazionaledelledificio.
Nei paragrafi successivi verranno analizzate le modalit di ripartizione dei carichi
orizzontali tra gli elementi di una struttura intelaiata, in presenza o meno di elementi
irrigidenti quali pareti, nuclei ascensore, utilizzando sia modelli piani che tridimensionali e
mettendo in luce il ruolo dei singoli elementi. Lintento quello di suggerire alcune
raccomandazioni sulla disposizione in pianta e in elevazione degli elementi per un
comportamentostrutturalepifavorevoleneiconfrontidelleazioniorizzontali.
3.1. Ilcomportamentodellestrutturepiane
(introduzione sulle tipologie di telai piano)
3.1.1. Ilcomportamentodellestruttureintelaiatepiane
(discussione sul comportamento di telai a ritti pendolari di telai MRF (shear-type e non) e di
strutture miste pareti-telaio
20
3.1.2. ilcomportamentodellepareti
(introduzione)
3.1.2.1. ilcomportamentodelleparetipiene
(comportamento a mensola, la modellazione semplificata e la modellazione agli elementi
finiti, effetto tira e spingi nelle pareti)
3.1.2.2. ilcomportamentodellepareticonaperture
3.1.2.2.1. pareticontrasversiinfinitamenterigidi
3.1.2.2.2. pareticontrasversiinfinitamentedeformabili
3.1.2.2.3. pareticontrasversiadeformazionefinita
(ILMETODODELLEMENSOLECOMPOSTE,LAMODELLAZIONEAGLIELEMENTIFINITI)
21
3.2. ILCOMPORTAMENTODELLESTRUTTURE
TRIDIMENSIONALI
Come gi si avuto occasione di osservare gli edifici reali possono presentare un
comportamento strutturale che per sua natura di presta ad essere meglio rappresentato da
modelli tridimensionali piuttosto che da modelli piani. Il caso della valutazione delle
sollecitazioni dovute ad azioni orizzontali agenti sugli edifici intelaiati un caso tipico che per
il suo enorme interesse, soprattutto nel campo delle azioni sismiche e del vento, bene trattare
in maniera approfondita, mettendo in luce gli aspetti che riguardano la corretta disposizione
in pianta e in elevazione degli elementi strutturali (travi, pilastri, setti, nuclei, etc..) allinterno di
un edificio.
Nei paragrafi precedenti si gi avuto occasione di analizzare il comportamento statico
di strutture piane sotto azioni orizzontali. Per capire i concetti base legati allestensione del
problema a tre dimensioni, viene dapprima analizzato il problema della ripartizione delle
forze orizzontali in edifici mono piano, costituiti da elementi distinti (pilastri, pareti, nuclei etc..)
collegati tra loro da un solaio rigido. Vengono poi forniti dei criteri di massima sulla
distribuzione in pianta degli elementi irrigidenti (pareti, nuclei ascensore)
Infine viene analizzato il caso di edifici a pi piani e vengono fornite alcune indicazioni
sulla modellazione con laiuto di programmi agli elementi finiti oggi sempre pi diffusi e
utilizzati dai professionisti.
3.2.1. Laripartizionedelleazioniorizzontaliinedifici
monopianoadelementidiscreti
Si consideri un edificio monopiano costituito da elementi distinti collegati tra loro da un solaio
rigido nel proprio piano, soggetto ad una coppia di forze orizzontali F
x
e F
y
. Le componenti di
spostamento sufficienti a descrivere il moto del solaio sono ovviamente 3: traslazione lungo x
(S
x
), traslazione lungo y (S
y
) e rotazione (). Il sistema di riferimento sia quello indicato in
figura 1 (0, x,y) rispetto al quale gli n elementi di supporto siano caratterizzato ognuno da un
sistema di assi locali (u,1,2) ruotato dellangolo
i
(figura 2).
Il sistema ovviamente iperstatico essendo il numero delle componenti di forza incognite
maggiori delle componenti di spostamento. Per la soluzione deve essere necessariamente
22
impiegato anche il legame costitutivo dei singoli elementi che immaginiamo sia di tipo elastico
lineare. Ogni elementi dunque caratterizzato da una rigidezza lungo lasse locale 1 (k
1i
),
una rigidezza lungo lasse locale 2 (k
2i
) ed eventualmente una rigidezza torsionale (k
i
).
Per la soluzione del problema si pu applicare indifferentemente il metodo delle forze o
degli spostamenti. Il metodo degli spostamenti nel caso specifico pi conveniente, essendo le
incognite cinematiche solamente 3.
Figura xxx Edificio monopiano Figura xxx Sistema di coordinate locali
Si applichi quindi una componente di spostamento di piano alla volta e si esprimano le
equazioni di equilibrio del piano nelle tre direzioni in funzione degli spostamenti. Ne risulta un
sistema algebrico di 3 equazioni lineari in 3 incognite (S
x
, S
y
,) che si pu risolvere in forma
chiusa.
Si applichi dapprima lo spostamento S
x
al piano. Le reazioni delli-mo elemento, nel
sistema globale, il cui significato facilmente desumibile dalle figure xxx, sono esprimibili
come segue:
R
xx,
= S
x
(coso
k
1
)coso
+S
x
(sino
k
2
)sino
= (k
1
cos
2
o
+k
2
sin
2
o
) = K
xx,
S
x
(1)
R
x,
= S
x
(coso
k
1
)sino
-S
x
(sino
k
2
)coso
= (k
1
-k
2
)sino
coso
= K
x,
S
x
(2)
H
0x,
= K
xx,
S
x
y
-K
x,
S
x
x
= (K
xx,
y
-K
x,
x
)S
x
= K
x0
S
x
(3)
Figura xxx Componenti locali di spostamento Figura xxx Componenti locali di forza
x
y
0
x
i
y
i
S
x
S
y
x
y
0
2
1
x
i
y
i
x
y
0
2
1
x
i
y
i S
x
S
x
cos
i
S
x
sin
i
x
y
0
2
1
x
i
y
i
k
1i
S
x
cos
i
k
2i
S
x
sin
i
R
xx,i
R
xy,i
23
Infatti, lo spostamento S
x
provoca le componenti di spostamento locale indicate in figura
xxx. Di conseguenza le forze lungo gli assi locali saranno quelle indicate in figura xxx, le cui
componenti lungo gli assi globali X e Y sono proprio quelle indicate nelle equazioni (1) (2).
Lequilibrio alla rotazione rispetto allorigine degli assi globali produce dellequazione (3).
Analogamente applicando una traslazione lungo lasse Y, S
y
si avranno le seguenti
componenti di forza nel riferimento globale:
R
x,
= S
(coso
k
1
)sino
-S
(sino
k
2
)coso
= (k
1
-k
2
)sino
coso
= K
x,
S
(4)
R
,
= S
(coso
k
1
)coso
+S
(sino
k
2
)sino
= (k
1
cos
2
o
+k
2
sin
2
o
)S
= K
,
S
(5)
H
0,
= K
x,
S
-K
,
S
= (K
x,
y
-K
,
x
)S
= K
0
S
(6)
Figura xxx Componenti locali di spostamento Figura xxx Componenti locali di forza
Le rigidezze lungo gli assi x e y sono indicate con i simboli K
xx,i
e K
yy,i
mentre la rigidezza
roto-rotazionale lungo lasse x e y sono indicate con i simboli K
xy,i
e K
yx,i
dove il primo simbolo
indica la componente di spostamento e il secondo la direzione della rigidezza. Si noti
luguaglianza delle rigidezze roto-traslazionali:
K
xy,i
=K
yx,i
Analogamente a quanto prima effettuato, applichiamo una rotazione rigida al piano ed
esprimiamo le componenti di forza delli-mo elemento in funzione della rotazione stessa.
Tenendo conto del vincolo di rigidit del piano li-mo elemento subir gli spostamenti S
xi
=
yi
ed S
yi
=x
i
. Di conseguenza le equazioni che si ottengono sono le seguenti:
R
0x,
= K
xx,
S
x
+K
x,
S
= (K
xx,
y
-K
x,
x
)0 = K
0x,
0 (7)
R
0,
= K
x,
S
x
+K
,
S
= (K
x,
y
-K
,
x
)0 = K
0,
0 (8)
H
00,
= K
x0,
0y
-K
0,
0x
+K
00
0 = K
0
0 (9)
x
y
0
2
1
x
i
y
i
S
y
S
y
sin
i
S
y
cos
i
x
y
0
2
1
x
i
y
i
k
1i
S
y
cos
i
k
2i
S
x
sin
i
R
yx,i
R
yy,i
24
La rigidezza torsionale del singolo elemento stata indicata con il simbolo K
,i
ed
generalmente trascurabile, a meno che non si tratti di elementi ad elevata rigidezza
torsionale, come ad esempio i vani ascensori, per i quali non lecito trascurarla.
Le equazioni di equilibrio delledificio nelle tra direzioni si possono quindi esprimere, per
ogni direzione principale, come la somma delle componenti nelle medesima direzione dovute
alle tre componenti di spostamento:
K
xx,
S
x
n
=1
+ K
x,
S
n
=1
+ K
0x,
0
n
=1
= K
xx
S
x
+K
x
S
+K
0x
0 = F
x
(10)
K
x,
S
x
n
=1
+ K
,
S
n
=1
+ K
0,
0
n
=1
= K
x
S
x
+K
+K
0
0 = F
(11)
K
x0,
S
x
n
=1
+ K
0,
S
n
=1
+ K
0,
0
n
=1
= K
x0
S
x
+K
0
S
+K
0
0 = H
0
(12)
Le precedenti possono essere espresse in forma pi compatta utilizzando la notazione
matriciale:
_
K
xx
K
x
K
0x
K
x
K
K
0
K
x0
K
0
K
0
_ _
S
x
S
0
_ = _
F
x
F
H
0
_ ossia KX = F (12)
dove i termini sulla diagonale principale della matrice di rigidezza K sono i termini di
rigidezza diretti mentre fuori dalla diagonale sia hanno i termini legati allaccoppiamento
roto-torsionale. Il caso che pi comunemente si incontra nella pratica progettuale quello per
il quale gli assi locali degli elementi coincidono con gli assi cartesiani globali di riferimenti
(sistema =0) (Figura xxxx).
Figura xxx Sistema =0 e posizione del centro di rigidezza
In tal caso la matrice di rigidezza K del sistema si semplifica essendo nulle le rigidezze
miste K
xy
e K
yx.
.
x
y
y
x
CR
y
cr
x
cr
0
25
Infatti, ricordando la definizione di rigidezza mista si ottiene:
(k
1
-k
2
)sino
coso
= K
x,
= u (13)
Il sistema in forma matriciale assume quindi al forma semplificata seguente
_
K
xx,
n
=1
u K
xx,
n
=1
y
u K
,
n
=1
K
,
n
=1
x
K
xx,
n
=1
y
K
,
n
=1
x
K
xx,
y
2
+K
,
x
2 n
=1
_ _
S
x
S
0
_ = _
F
x
F
H
0
_ (14)
In tali condizioni, applicando uno spostamento S
x
=1, il sistema risponder con il seguente
sistema di reazioni strutturali nelle tre direzioni principali:
K
xx
= F
x
u = F
K
0
= K
x,
y
n
=1
= H
0
In presenza di un sistema semplice come quello di figura xxx la sola traslazione produce
anche una componente di momento, rispetto allorigine degli assi. Eovvio chiedersi dove
occorre traslare il sistema di riferimento affinch tale componente si annulli, ossia determinare
sistema di riferimento per il quale il momento statico delle rigidezze si annulli. Lorigine di tale
sistema detto centro delle rigidezze indicato in figura xxx con il simbolo CR, le cui
coordinate sono le seguenti:
x
CR
=
K
ji
x
n
i=1
K
ji
n
i=1
, y
CR
=
K
xi
i
n
i=1
K
xi
n
i=1
(15)
Passando al nuovo sistema di riferimento la matrice di rigidezza diventa diagonale e il
sistema di equazioni si disaccoppia:
_
K
xx
u u
u K
u
u u K
0
_ _
S
x
S
0
_ = _
F
x
F
H
0
_ (16)
26
La soluzione del sistema immediata:
S
x
=
P
x
K
xx,i
n
i=1
S
=
P
j
K
jj,i
n
i=1
0 =
M
0
K
xx,i
i
2
+K
jj,i
x
i
2 n
i=1
(17)
Le componenti di spostamento dei singoli elementi si trovano ricordando che sussiste il
vincolo di rigidit cinematica del piano che li collega, esprimibile attraverso le relazioni
seguenti:
S
x
= S
x
+0y
= S
-0x
= 0
Dalle precedenti si ricavano infine le reazioni strutturali dei singoli elementi:
F
x
= K
x
S
x
F
= K
= K
0
0
Sostituendo le espressioni degli spostamenti del piano rigido si ottengono le forze nelle
due direzioni principali dellelemento i-mo:
F
x
= F
x
K
xx,i
K
xx,i
n
i=1
+H
0
K
xx,i
i
K
xx,i
i
2
+K
jj,i
x
i
2 n
i=1
(18)
F
= F
K
jj,i
K
jj,i
n
i=1
+H
0
K
jj,i
x
i
K
xx,i
i
2
+K
jj,i
x
i
2 n
i=1
(19)
Si noti lanalogia con lespressione della formula di Navier per la presso-flessione di travi
di De Saint Venant. Esse suggeriscono che per aumentare la rigidezza torsionale della
struttura occorre disporre gli elementi il pi lontano possibile dal centro delle rigidezze, senza
per che questultimo subisca spostamenti. In genere sufficiente disporre gli elementi preposti
a sopportare i carichi orizzontali nella periferia delledificio. Situazioni particolari possono
invece richiedere uno studio ad hoc della posizione in pianta degli elementi.
Esempio xxx: Si consideri ledificio monopiano indicato nella figura seguente. Essendo gli
elementi resistenti delle pareti, di spessore s=16 cm si ha che k
2
<<k
1
e dunque si pu
27
adottare la semplificazione per la quale k
2
pu essere considerato trascurabile. Una seconda
semplificazione quella di trascurare la deformazione a taglio. Un terza semplificazione
quella di considerare le pareti incastrate a terra e libere di ruotare in sommit, in quanto si
ritiene che il solaio non sia in grado di contrastare la rotazione in sommit degli elementi.
Figura xx Pianta delledificio analizzato
Sotto tali ipotesi la rigidezza flessionale del singolo pannello pari a k
i
=3EJ/H
3
. Essendo i
pannelli alti H=4.5 m e realizzati in calcestruzzo armato con modulo elastico E
c
=310000 MPa
le rigidezze valgono:
k
1
= k
2
= k
3
= k
=
SE[
E
3
=
S S1uuu
16 Suu
3
12
4Su
3
= 17u.uuu
kN
cm
k
4
= k
5
= k
x
=
SE[
E
3
=
S S1uuu
16 Suu
3
12
4Su
3
= S6.74u
kN
cm
Poich il sistema possiede un asse di simmetria parallelo allasse X il centro delle rigidezza
il lordinata del centro di rigidezza CR nota e pari a y
CR
=2.5 m. Rimane da determinare la
posizione del centro di rigidezza rispetto allasse Y. Ricordando la definizione di centro di
rigidezza la sua ascissa avr lespressione:
x
CR
=
k
3
=1
k
3
=1
=
k
u +k
S +k
11
Sk
x
=
14
S
= 4.67m
La forza F applicata al sistema sia pari a 1000 kN e sia posizionata a 7.5 m dal setto 1.
La sua posizione rispetto al centro delle rigidezze risulta quindi pari a 2.83 m. Riportando la
28
forza al CR le componenti di forza esterne sono costituite da una forza F=1000 kN e da un
momento M
0
=2830 kNm.
Di conseguenza le componenti di forza longitudinale delle singole pareti varranno:
F
1
= F
K
,1
K
,
3
=1
+H
0
K
,1
x
1
K
xx,
y
2
+K
,
x
2 3
=1
=
1uu
S
-4.2u 4.67 = 1S7kN
F
2
= F
K
,
K
,
3
=1
+H
0
K
,2
x
2
K
xx,
y
2
+K
,
x
2 3
=1
=
1uu
S
-4.2u 1.67 = 26SkN
F
3
= F
K
,
K
,
3
=1
+H
0
K
,3
x
3
K
xx,
y
2
+K
,
x
2 3
=1
=
1uu
S
+4.2u 6.SS = 6uukN
La somma di tali reazioni deve essere pari alla forza F. Le reazioni degli elementi 4 e 5
deve invece costituire necessariamente una coppia:
F
x4
= F
x
K
xx,
K
xx,
3
=1
+H
0
K
xx,
y
K
xx,
y
2
+K
,
x
2 3
=1
= u +4.2 2.S = 1uSkN
F
x5
= F
x
K
xx,
K
xx,
3
=1
+H
0
K
xx,
y
K
xx,
y
2
+K
,
x
2 3
=1
= u -4.2 2.S = -1uSkN
La forza esterna F viene quindi ripartita tra gli elementi delledificio secondo lo schema
indicato nella figura seguente.
Figura xx Ripartizione delle forze orizzontali
137kN
263kN
600kN
105kN
105kN
2630kNm
29
3.2.2. Ladisposizioneinpiantadeglielementiirrigidenti
Le formule 18 e 19 ricordano come gi detto le formule per la valutazione delle tensioni in
travi presso-inflesse. Ne discende, che conviene aumentare il momento dinerzia delle
rigidezze disponendo gli elementi sulla periferia. La disposizione degli elementi secondo gli
assi globali di riferimento permette inoltre limmediata diagonalizzazione della matrice di
rigidezza e una immediata visione del comportamento strutturale lungo gli assi principali
delledificio
Non per raro incontrare situazioni nelle quali non cos chiaro il comportamento sotto le
azioni orizzontali. Ad esempio la figura seguente mostra una situazione, certamente non rara,
nella quale non immediata la ricerca della disposizione ottimale degli elementi. Ci si chiede
pertanto se esistono delle direzioni principali rispetto alle quale conviene orientare gli
elementi per ottenere una risposta strutturale pi vantaggiosa delledificio rispetto alle
sollecitazioni torcenti.
Figura xxx Direzioni principali di un edificio
La ricerca delle direzioni principali pu essere fatta cercando quel sistema di riferimento
che diagonalizza la matrice di rigidezza. Esistono molte tecniche di diagonalizzazione di
matrici, che si basano su opportuni cambi di base (BIBLIO). Una volta determinate le direzioni
principali si possono esprimere i momenti dinerzia rispetto ad esse e si pu cos costruire
lellisse centrale dinerzia delle rigidezze. Ci permette di valutare la direzione di maggior
debolezza delledificio, ed eventualmente suggerire interventi di irrigidimento proprio in
quella direzione.
Per comprendere meglio dal punto di vista fisco il problema della determinazione delle
direzioni principali di un edificio monopiano si pu procedere come segue. Una volta valutato
il centro delle rigidezze esso pu essere considerato lorigine del sistema di riferimento
x
k
y
k
30
principale in quanto alcuni termini fuori la diagonale si annullano, come gi osservato in
precedenza. Per la determinazione delle direzioni principali che annullano gli altri termini
della matrice di rigidezza si pu far riferimento alla sottomatrice 2x2 della matrice di
rigidezza stessa interpretandola come un tensore simmetrico del 1 ordine.
_
K
xx
K
x
u
K
x
K
u
u u K
0
_ _
S
x
S
0
_ = _
F
x
F
H
0
_ (20)
Come noto tutti tensori simmetrici del 1 ordine hanno alcune propriet importanti, una
delle quali quella di possedere 2 direzioni principali tra loro ortogonali, il cui angolo
dinclinazione pu essere determinato con la relazione seguente (BIBLIO):
tgo =
2K
xj
K
x
-K
j
(21)
Una volta valutato langolo dinclinazione possibile determinare anche le rigidezze
principali delledificio, al fine di valutare se si in presenza o meno di una direzione debole
nei confronti delle azioni orizzontali.
Esistono criteri consolidati per la disposizione di elementi in pianta che derivano
essenzialmente dallesperienza in campo sismico.
Prima fra tutti quello della regolarit strutturale, dalla quale derivano i criteri di
semplicit strutturale e di simmetria. Questultima garantisce evidentemente un buon
comportamento rispetto a qualsiasi direzione di provenienza delle forze esterne, mentre la
semplicit strutturale garantisce al progettista la piena consapevolezza dei percorsi di carico
per una corretta disposizione degli elementi resistenti. Inoltre la modellazione, lanalisi, il
dimensionamento, la definizione dei dettagli, sono soggetti a minori incertezze e la previsione
del comportamento della struttura risulta pi affidabile.
Un ulteriore importante criterio quello di garantire un buon comportamento torsionale.
Disposizioni molto eccentriche possono indurre eccessivi spostamenti in elementi lontani dal
centro di rigidezza. Ad esempio un nucleo ascensore disposto come in figura indurrebbe
elevati spostamenti nei pilastri di bordo.
Occorre evitare anche situazioni a scarso comportamento torcente, un esempio delle quali
riportato in figura xxx. La zona piu scura indica il luogo dei punti allinterno dei quali se
31
ricadesse la risultante delle forze esterne si avrebbe un ridotto apporto torcente delledificio
per lannullarsi dei contribuiti di alcuni dei suoi elementi.
Figura xxxx- Disposizione eccentrica del nucleo
ascensore
Figura xxx Configurazione a scarso
comportamento alle sollecitazioni torcenti
Un ulteriore criterio, quasi sempre rispettato, quello delliperstaticit del sistema. Ci
garantisce il buon funzionamento del sistema di controventamento orizzontale, anche in
presenza di rottura prematura di alcuni elementi, al contrario di configurazioni isostatiche per
le quali potrebbero non esserci risorse sufficienti per contrastare sollecitazioni torcenti in fase
post-elastica.
Occorre inoltre porre molta attenzione a situazioni nelle quali il sistema pure essendo
iperstatico, a causa della particolare disposizione degli elementi esso diventa degenere. Un
esempio quello indicato in figura xx. Il sistema degenere poich dal punto di vista
cinematico esiste un centro di rotazione che rende labile il sistema che non in grado di
equilibrare il momento torcente esterno M=Fd.
Figura xxx Sistema di controventamento labile
CR
Spost.eccessivo
CentrodiRotazione
F d
32
Nel caso di edifici multipiano la situazione diventa evidentemente pi complessa rispetto a
quanto fin ora esposto, anche se alcuni dei concetti prima illustrati possono essere ritenuti
ancora validi.
Figura xxx edificio regolare Figura xxx telaio multipiano
shear-type
Figura xxx edificio
irregolare in altezza
Nellipotesi di piani rigidi il sistema di equazioni che governa la statica del sistema simile
a quello degli edifici monopiano (vedi eq. 12). Si pu in particolare individuare per il piano i-
mo una terna di incognite cinematiche S
xi
, S
yi
,
i
e scrivere le equazioni di equilibrio nelle tre
direzioni (X,Y,), giungendo cos al sistema lineare seguente:
|K]
`
1
1
1
1
1
1
S
x1
S
1
0
1
S
x2
S
2
0
2
1
1
1
1
1
1
1
=
`
1
1
1
1
1
1
F
x1
F
1
H
1
F
x2
F
2
H
2
. .
1
1
1
1
1
1
1
ovvero KX = F (22)
La matrice di rigidezza K generalmente piena ed costituita da blocchi di matrici sulla
diagonale principale che rappresentano le matrici di rigidezza dei singoli piani. Le matrici
fuori dalla diagonale principale rappresentano gli elementi di interazione tra un piano e
laltro.
_
K
11
K
21
K
12
K
22
. .
_ _
X
1
X
2
_ = _
F
1
F
2
_ (23)
Baricentriallineati
Baricentridisallineati
S
xi
S
yi
i
X
Y
33
Nel caso di edifici regolari in pianta e in elevazione, per i quali i centri di rigidezza dei
singoli piani risultano essere allineati (Figura XXX), le direzioni principali rimangono anchesse
inalterate, sicch la forma della matrice, con riferimento al centro delle rigidezze di ciascun
piano, assume la forma seguente:
K =
l
l
l
l
l
l
l
l
l
l
x u u
u x u
u u x
x u u
u x u
u u x
u u . .
u u . .
u u . .
x u u
u x u
u u x
x u u
u x u
u u x
x u u . .
u x u . .
u u x . .
u u
u u
u
. .
u
. .
. .
x u u
u x u
u
. .
u
. .
x
. .
x u u . .
u x u . .
u
. .
u
. .
x . .
.
1
1
1
1
1
1
1
1
1
1
(24)
Gli elementi contrassegnati da una x sono gli elementi non nulli, gli elementi contrassegnati
da un sono elementi nulli solo nel caso di edifici con telai tipo shear-type. In tal caso infatti,
la struttura della matrice K si semplifica in quanto la propagazione delle interazioni tra i piani
limitata dallipotesi di travi infinitamente rigide.
La soluzione del sistema molto semplice in quanto esso si disaccoppia in tre sistemi
indipendenti dai quali possibile ricavare le incognite cinematiche:
|K
x
]{S
x
] = {F
x
] (25)
|K
]|S
| = |F
| (26)
|K
0
]{0] = {M] (27)
dove le matrici K
i
contengono gli elementi associati alla componente di spostamento i=x,y,.
In casi pi generali, quando le condizioni di regolarit strutturale vengono meno, possibile
che le direzioni principali non esistano. E il caso ad esempio delledificio di figura xxx nel
quale lultimo piano di dimensioni ridotte. Ci comporta un disallineamento dei centri di
rigidezza con conseguente impossibilit di determinare direzioni principali univoche per lintero
edificio.
In tal caso per la soluzione necessario ricorrere a programmi ad hoc o programmi agli
elementi finiti con i quali possibile modellare configurazioni strutturali del tutto generali.
3.2.3.
Negli e
collegam
nelle fig
Ad
provoch
pilastro
tale effe
Per
longitud
direzion
. Lamod
edifici sono
mento vertic
gure xxx e x
Figura
Figu
esempio, ne
herebbe, in
di bordo. I
etto.
ledificio d
dinale espli
ne.
dellazion
o spesso p
cale tra i di
xxx, ideati p
a xxx Esem
ura xxx Es
el caso del
assenza di
nuclei asce
i figura xxx
cata dal n
nedein
presenti nuc
versi piani.
proprio per
mpio di edif
sempio di e
lledificio d
i ulteriori e
nsori posti l
xx linsuffic
nucleo vien
34
nucleisca
clei ascenso
Due esemp
r evitare rile
ficio con nuc
dificio con n
i Figura xx
elementi di
ontano dal
iente azion
ne invece c
aleeasc
ori e scale
i di buona d
evanti effett
clei scale e
nucleo scala
xx la posizi
irrigidiment
centro delle
e di controv
compensata
censori
e per le
disposizione
ti di accopp
ascensori (B
a e setti (BIB
ione centra
to, elevati e
e rigidezze
ventamento
da setti
ovvie nece
e sono quell
piamento tor
BIBLIO)
BLIO)
le del nucle
effetti torsio
compensan
o lungo la d
posti lungo
essit di
i indicati
rsionale.
eo scale
onali nei
no invece
direzione
o quella
35
Nuclei scale e ascensori presentano in genere delle aperture, anche se discontinue lungo
laltezza, e un modesto spessore delle pareti (dellordine di 15-20 cm).
Rispetto a quanto illustrato precedentemente c la necessit di aggiungere alcune
informazioni sulla modellazione di tali elementi, cos che si possa correttamente tener conto
nelledificio del loro contributo irrigidente.
Figura xxx- Esempio di nucleo scale e differenti livelli di modellazione
Un esempio di nucleo scala illustrato in figura xxx. Un primo livello di modellazione
rappresentato in figura xxx (a). Esso realizzato mediante elementi monodimensionali. Ogni
tratto di parete viene modellato con un elemento trave la cui sezione pari alla sezione della
parete stessa. In maniera analoga i trasversi vengono modellati con elementi trave con sezione
trasversale di altezza pari a quella del trasverso e spessore pari allo spessore della parete.
Tali elementi vengono poi collegati tra loro mediante tratti rigidi (rigid-link), cos come gi
illustrato nel caso delle pareti. I setti vengono infine considerati incastrati a terra, anche se la
realizzazione fisica di tale vincolo richiede particolare attenzione (BIBLIO).
Figura xxx Imposizione della congruenza
dello spostamento verticale
Figura xxx Trasferimento delle tensioni di
taglio nello spigolo
(a) (b) (c)
(d)
Pianorigido
Parete
Stesso
spostamento
verticale
Rigidlink
A
36
Modelli pi raffinati fanno uso di elementi finiti di piastra-lastra che permettono di
simulare sia il comportamento nei confronti delle azioni verticali (comportamento a lastra) che
delle azioni orizzontali (comportamento a piastra). Tre esempi di modelli via via pi raffinati
sono quelli illustrati in figura xxx b) c) e d). Il modello b) prevede che le pareti siano
modellate con elementi finiti rettangolari piani a 4 o 8 nodi mentre i trasversi sono modellati
con bielle equivalenti in grado di simulare sia il comportamento flessionale sia il
comportamento a taglio.
Figura xxx elementi di piastra a 8 nodi e campi di spostamento
La figura xxx illustra il modello a bielle equivalenti di un trasverso. Le bielle orizzontali di
area A
h
simulano le forze interne (compressione e trazione) legate alla flessione mentre le
bielle inclinate simulano il comportamento a taglio (BIBLIO).
Figura xxx Modello a bielle equivalenti del trasverso
Per la componente flessionale sufficiente eguagliare la rigidezza flessione del trasverso
con quella del modello a bielle (momento dinerzia rispetto al centro del trasverso) per
ottenere larea Ah.
2A
h
_
J
2
]
2
=
tJ
3
12
In maniera del tutto analoga si ottiene larea delle bielle inclinate.
dove
In a
di lastra
ottenere
deforma
A tit
costruito
caso mo
Figura x
delledif
I no
Occorre
converg
general
laltro si
Nel
uninflue
pu esse
torsiona
baricent
esempio
il fattore
lternativa a
a-piastra p
e informaz
ativo dellel
tolo desemp
o mediante
odellati med
xxx Mod
ficio di figu
di degli ele
e per impo
genti negli sp
mente una c
ia il taglio v
caso di
enza limitata
ere modella
ale pari a
tro della se
o illustrato
di taglio de
al metodo d
er modellar
zioni di m
emento ana
pio la figura
il codice di
diante lutiliz
dellazione i
ra xxx
ementi subis
orre la cong
pigoli. Un e
cerniera in m
verticale.
nuclei asce
a sul suo co
ato come un
quella di
ezione trasv
o in figura x
ella sezione
delle bielle
re il compo
maggior de
alizzato.
a seguente
calcolo SAP
zzo di pilast
n SAP2000
scono sposta
gruenza de
esempio ill
maniera che
ensore, gen
omportamen
unico elem
relativa all
versale e c
xxx.
37
del trasver
equivalenti
ortamento d
ettaglio su
mostra il mo
P2000. Le p
tri e collega
0
Figura x
nucleo a
amenti in a
egli spostam
lustrato in fi
e lunica soll
neralmente
nto struttura
ento equiva
a sezione
collegato rig
rso.
si possono
dei trasversi
llandament
odello comp
pareti e il n
amenti rigid
xxx Mode
scensore
ccordo con
menti vertica
igura xxx. I
lecitazione
si ipotizz
ale. Sotto ta
alente al nuc
del nucleo.
gidamente
utilizzare a
. Mesh pi
to dello s
pleto delled
nucleo scala
i.
ellazione a
il vincolo d
ali dei tratt
Il vincolo im
in comune tr
a che le
ale ipotesi u
cleo con rigi
. Tale elem
agli spigol
anche eleme
fitte perme
stato tensio
dificio di fig
sono stati i
bracci rigi
di piano rig
ti rigidi adi
posto nel p
ra un tratto
aperture
un nucleo a
idezza fless
mento va p
i della sez
RigidLink
N
enti finiti
ettono di
onale e
gura xxx
in questo
idi di un
gido. Per
iacenti e
unto A
rigido e
abbiano
scensore
sionale e
posto nel
ione. Un
k
odi
Trave
38
Per elementi a sezione aperta conveniente che le rigidezze traslazionali nelle due
direzioni principali siano riferite al centro di torsione della sezione. Leffetto torsionale potr
essere determinato successivamente, una volta note le forze sullelemento. Il centro di torsione
di una sezione quel punto nel quale possibile applicare la forza di taglio, senza che nella
sezione nasca alcuna sollecitazione di torsione.
A titolo desempio si consideri il nucleo irrigidente di figura xxx costituito da 3 setti posti
ad U del quale si vuole calcolare il centro di torsione.
Figura xxx Geometria nucleo Figura xxx Forze interne del nucleo
Il centro di torsione C
t
si valuta facilmente applicando la sua definizione. Per valutarne
lascissa, ad esempio, si immagini di spostare la risultante delle forze verticali dal centro di
torsione C
t
al setto verticale. Per effetto di questo spostamento il sistema di forze sar
composto dalla medesima risultante verticale V, ma con in pi una coppia Q h.
Per ovvi motivi di equivalenza statica la distanza d dal setto verticale, alla quale si trova il
centro di torsione C
t
, si trova imponendo la seguente identit:
b = IJ J =
h
v
(xx)
La forza orizzontale Q si valuta integrando lo scorrimento nel singolo tratto orizzontale,
espresso mediante la formulazione approssimata di Jourawsky:
Q = ] tu =
b
0
]
TS
-
tI
x
tu =
b
0
]
T
I
x
[t
h
2
u =
b
0
T
I
x
th
2
b
2
2
(xx)
h
b
d
G C
t
G
v
Q
Q
39
In maniera del tutto analoga si pu esprimere la risultate dello scorrimento verticale V,
integrando cio il prodotto t su tratto verticale di lunghezza h:
v = 2 ] tu =
h
2
0
]
TS
-
tI
x
tu =
h
2
0
]
T
I
x
_bt
h
2
+t [
h
2
-
{
2
] u =
b
0
T
I
x
[
bth
2
2
+
th
3
12
(xx)
Con le espressioni precedenti possibile esprimere d in funzione delle caratteristiche
geometriche della sezione, in particolare la lunghezza dei singoli tratti:
J =
h
v
=
T
I
x
th
2
b
2
2
h
T
I
x
_
bth
2
2
+
th
3
12
]
=
b
2
2b+
h
3
(xx)
Infine possibile valutare la distanza del centro di torsione dal baricentro del nucleo
sommando la distanza d alla distanza d
G
tra il setto verticale e il baricentro G. C da
aggiungere che qualora esista un asse di simmetria, il centro di torsione sicuramente
posizionato su di esso. Se la sezione a doppio asse di simmetria il centro di torsione coincide
con il baricentro.
40
A titolo desempio si consideri un edificio ad un piano composto da un nucleo irrigidente e
tre pareti poste in pianta come illustrato in figura xxx. Ledificio realizzato su una griglia 7.5
m x 7.5 m e i setti sono di spessore costante pari a 0.2 m. Ogni parete ha un momento
dinerzia longitudinale pari a 7,03 m
4
, mentre il nucleo irrigidente ha un momento dinerzia
lungo x pari a 28.13 m
4
e un momento dinerzia lungo y pari a 49.22 m
4
. La rigidezza
torsionale propria del nucleo irrigidente si considera trascurabile visto che la sezione di tipo
aperto a spessore sottile.
Figura xxx Esempio di edificio con nucleo ascensore
CR
G C
T
F=1000kN
y Y
X
X
(1)
(2)
(4)
(3)
3.21
2.50
4.29
11.25
12.00
41
Il centro delle rigidezze CR delledificio posizionato nel punto di coordinate:
X
CR
= 11.66 m
Y
CR
= 12.uu m
La tabella seguente mostra i dettagli relativi al loro calcolo.
Esso stato valutato con riferimento al centro di torsione CR del nucleo irrigidente per
tener conto del solo contributo statico alla traslazione del nucleo. Il centro di torsione si trova
con la formula ricavata precedentemente:
J =
b
I
=
b
2
2b +
b
S
= S.21 m
A questo punto possibile calcolare le forze nei singoli elementi:
Elemento ForzaFxj
traslazione
ForzaFyj
traslazione
ForzaFxj
Rotazione
ForzaFyj
Rotazione
Forzatotale
lungoX
Forzatotale
lungoY
1 0 777,8 44.89 773.00 44.89 4.89
2 0 0 44.89 0 44.89 0
3 0 111,09 0 386.50 0 497.59
4 0 111,09 0 386.50 0 497.59
Somma 0 0 1000
Le forze applicate nel baricentro del nucleo lungo X ed Y, possono essere successivamente
riportate al suo baricentro per determinare anche gli effetti della torsione. Nota la distanza d
il momento torcente sar pari a N
t
= F
y
(u+x
u
) = 2S6.S2 kNm.
Controvento Iyj xj Iy. xj Ixj yj Ix.yj
1 49,22 4,29 211,15 28,13 11,25 316,46
2 0,00 26,25 0,00 7,03 15,00 105,45
3 7,03 37,50 263,63 0,00 3,75 0,00
4 7,03 37,50 263,63 0,00 18,75 0,00
somma 63,28 738,40 35,16 421,91
Potrebbero piacerti anche
- MANUALEDocumento26 pagineMANUALEGeorge StefNessuna valutazione finora
- Analisi LimiteDocumento44 pagineAnalisi LimiteMario ROSSINessuna valutazione finora
- Indice 147 PDFDocumento53 pagineIndice 147 PDFMaurizio VellaNessuna valutazione finora
- 17-Solai Misti Legno Calcestruzzo Metodi Di VerificaDocumento19 pagine17-Solai Misti Legno Calcestruzzo Metodi Di Verificamich7bellNessuna valutazione finora
- Sequenza Tesatura StralliDocumento8 pagineSequenza Tesatura StralliAnonymous efXzvzOVNessuna valutazione finora
- L'Analisi Strutturale Delle Costruzioni in MuraturaDocumento20 pagineL'Analisi Strutturale Delle Costruzioni in MuraturaPaolo BirattaNessuna valutazione finora
- A Ghersi, Tecnica Dell Costruzioni Il Cemento Armato, CuenDocumento37 pagineA Ghersi, Tecnica Dell Costruzioni Il Cemento Armato, CuenJacopo TacciniNessuna valutazione finora
- ImpalcatiDocumento6 pagineImpalcatiVangjush MbriceNessuna valutazione finora
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- CapriateDocumento23 pagineCapriateciccioriccio90Nessuna valutazione finora
- Steel StructuresDocumento38 pagineSteel Structuresbosnia76Nessuna valutazione finora
- 2011-11-23 Orlando Esempio CapannoneDocumento82 pagine2011-11-23 Orlando Esempio CapannoneLucaRampiniNessuna valutazione finora
- Volte Sottili Areticolari DelGuerraDocumento37 pagineVolte Sottili Areticolari DelGuerraPriscilla CombsNessuna valutazione finora
- Solai Solette Armatura Incrociata PDFDocumento10 pagineSolai Solette Armatura Incrociata PDFAleksiey PellicciaNessuna valutazione finora
- Elementi Di PiastraDocumento18 pagineElementi Di PiastraD'Armi StefanoNessuna valutazione finora
- Verifica Statica TraviDocumento24 pagineVerifica Statica Travimanu927Nessuna valutazione finora
- Cerchio Di MohrDocumento36 pagineCerchio Di Mohrromario9Nessuna valutazione finora
- Collegamenti AcciaioDocumento6 pagineCollegamenti AcciaioCARMELONessuna valutazione finora
- Taglio 1Documento15 pagineTaglio 1oronzoNessuna valutazione finora
- Strutture in AcciaioDocumento11 pagineStrutture in AcciaioEmanuele MastrangeloNessuna valutazione finora
- Brochure Legno LAMELLARE Tipologie UnioniDocumento32 pagineBrochure Legno LAMELLARE Tipologie Unionicinzia balcaiciNessuna valutazione finora
- Progetto PonteDocumento46 pagineProgetto PonteRobert VochescuNessuna valutazione finora
- 04 Dispense OndeDocumento37 pagine04 Dispense OndeMassimilianoTerenziNessuna valutazione finora
- Capitolo 2. Fatica Oligociclica - 2436341Documento4 pagineCapitolo 2. Fatica Oligociclica - 2436341mgualdiNessuna valutazione finora
- 20 Lezione 18 Gusci - 492..524 PDFDocumento33 pagine20 Lezione 18 Gusci - 492..524 PDFElvira VallarioNessuna valutazione finora
- 02b TECNICA 2012-13 Rev1.0Documento24 pagine02b TECNICA 2012-13 Rev1.0GuillaumeHNONessuna valutazione finora
- Capriata PDFDocumento10 pagineCapriata PDFvm.amicoNessuna valutazione finora
- Ritiro e ViscositàiDocumento53 pagineRitiro e ViscositàiIvoGraziotinNessuna valutazione finora
- Dispensa Archi Corretta 20 - 06 - 2013 PDFDocumento32 pagineDispensa Archi Corretta 20 - 06 - 2013 PDFVeraniJNessuna valutazione finora
- Stabilità Delle Sezioni MetallicheDocumento6 pagineStabilità Delle Sezioni Metallichepaolop87Nessuna valutazione finora
- Come Calcolare Solai in C.A. Su Lamiera Grecata Collaborante PDFDocumento20 pagineCome Calcolare Solai in C.A. Su Lamiera Grecata Collaborante PDFPier Giuseppe GallettoNessuna valutazione finora
- 08 Costruzione Di Ponti 2007-08 Rev0Documento20 pagine08 Costruzione Di Ponti 2007-08 Rev0GuillaumeHNONessuna valutazione finora
- 2010 - Lezione 16 MuraturaDocumento24 pagine2010 - Lezione 16 MuraturaLuigi ParoliNessuna valutazione finora
- Progettazione Di Un Plinto Di Fondazione in C.A PDFDocumento16 pagineProgettazione Di Un Plinto Di Fondazione in C.A PDFNiccolòNessuna valutazione finora
- Appunti Di C.A.P 2 3Documento22 pagineAppunti Di C.A.P 2 3carman007Nessuna valutazione finora
- Appunti Acciaio GhersiDocumento51 pagineAppunti Acciaio GhersiDonato PaglionicoNessuna valutazione finora
- 4 Metodi Soluzione PiastreDocumento27 pagine4 Metodi Soluzione PiastreAleksiey PellicciaNessuna valutazione finora
- Teoria Delle LastreDocumento26 pagineTeoria Delle Lastrefrank_the_bangNessuna valutazione finora
- 2 - I Difetti ReticolariDocumento9 pagine2 - I Difetti ReticolariAntonio0% (1)
- 23 Lucidi LastreDocumento32 pagine23 Lucidi Lastreantonioviton07vkNessuna valutazione finora
- Appunti Esercitazioni Guida Ansys 12Documento294 pagineAppunti Esercitazioni Guida Ansys 12Emanuele ButtàNessuna valutazione finora
- Progetto Capannone EsempioDocumento44 pagineProgetto Capannone Esempionaca84Nessuna valutazione finora
- Elementi Strutturali in Cap - 1Documento14 pagineElementi Strutturali in Cap - 1Andrea ValenziNessuna valutazione finora
- Cupole Lezione26032013 PDFDocumento34 pagineCupole Lezione26032013 PDFMarco Francesco FunariNessuna valutazione finora
- Elasticita 22Documento7 pagineElasticita 22vaffanculo987Nessuna valutazione finora
- Progetto Travata Taglio-DuttilitàDocumento41 pagineProgetto Travata Taglio-DuttilitàGiancarlo MarcariNessuna valutazione finora
- Costruzioni Di AcciaioDocumento28 pagineCostruzioni Di AcciaioMario MereniNessuna valutazione finora
- Costruzione Dominio Di Interazione 2Documento37 pagineCostruzione Dominio Di Interazione 2Matteo MessinaNessuna valutazione finora
- Progetto Di Piastre StrisceDocumento14 pagineProgetto Di Piastre StrisceAndrea InfusoNessuna valutazione finora
- L. Cedolin - Appunti Di Lezione Su Gusci Cilindrici e Sferici - Cap. 1Documento21 pagineL. Cedolin - Appunti Di Lezione Su Gusci Cilindrici e Sferici - Cap. 1Giorgio RivaNessuna valutazione finora
- DD-2017-915-B - Relazione Di Calcolo StruttureDocumento64 pagineDD-2017-915-B - Relazione Di Calcolo StruttureLudovicoVicoNessuna valutazione finora
- Push OverDocumento12 paginePush Overandrea_l1349Nessuna valutazione finora
- Statica EdDocumento42 pagineStatica EdHULIOSMELLANessuna valutazione finora
- Accelerogrammi Spettrocompatibili Per LaDocumento238 pagineAccelerogrammi Spettrocompatibili Per LaDidi GiNessuna valutazione finora
- Teoremi Della Plasticità (Limite Inferiore e Superiore)Documento40 pagineTeoremi Della Plasticità (Limite Inferiore e Superiore)Giuseppe GentileNessuna valutazione finora
- TeCo Strutture Composte 13Documento56 pagineTeCo Strutture Composte 13JakubBrajaNessuna valutazione finora
- Geometria Delle MasseDocumento44 pagineGeometria Delle MasseMa RcoNessuna valutazione finora
- Appunti Di Fisica PDFDocumento104 pagineAppunti Di Fisica PDFNgul ThometNessuna valutazione finora
- Impianti Turbine A VaporeDocumento41 pagineImpianti Turbine A VaporeFederico MassaroNessuna valutazione finora
- Modello TesiDocumento21 pagineModello TesistefanoNessuna valutazione finora
- Ce 00 BtemisuraDocumento50 pagineCe 00 BtemisuraGiorgio Knock-Out BertiNessuna valutazione finora
- Tecnologia Della Fotorivelazione Basata Su Dispositivi A Semiconduttore - Corpo TesiDocumento229 pagineTecnologia Della Fotorivelazione Basata Su Dispositivi A Semiconduttore - Corpo TesiEnrico MolinariNessuna valutazione finora
- Fisica Quimica 2Documento259 pagineFisica Quimica 2Jairon ArmijosNessuna valutazione finora
- GUIDA FINDER Surge Protection ITDocumento74 pagineGUIDA FINDER Surge Protection ITMarco MatteucciNessuna valutazione finora