Potrebbero piacerti anche
- CA 09 PianificazioneTraiettorieDispensa PDFDocumento55 pagineCA 09 PianificazioneTraiettorieDispensa PDFMario TodiscoNessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- Numeri QuanticiDocumento2 pagineNumeri QuanticiSabrina CeppiNessuna valutazione finora
- FisicaI TsDocumento4 pagineFisicaI TsAngelo NobiliNessuna valutazione finora
- Lezione Laplace Poisson STATICA - Maggio2015Documento40 pagineLezione Laplace Poisson STATICA - Maggio2015sarah96Nessuna valutazione finora
- Formulario FISICA 2Documento4 pagineFormulario FISICA 2And ReaNessuna valutazione finora
- Geometria Curve e Superfici 123Documento63 pagineGeometria Curve e Superfici 123esseciNessuna valutazione finora
- I Esercitazione-1Documento3 pagineI Esercitazione-1lampadina135Nessuna valutazione finora
- Esercitazione 4Documento2 pagineEsercitazione 4ing.dgrilloNessuna valutazione finora
- Architetture Dei Calcolatori 2223 042 060 ECDocumento19 pagineArchitetture Dei Calcolatori 2223 042 060 ECGiuseppe CatalanoNessuna valutazione finora
- Compito 20150622Documento1 paginaCompito 20150622de visu carloNessuna valutazione finora
- Lezione 6 OttobreDocumento6 pagineLezione 6 OttobremikaelNessuna valutazione finora
- Formule Di Teoria Dei SistemiDocumento5 pagineFormule Di Teoria Dei SistemijonasNessuna valutazione finora
- Quadri CheDocumento22 pagineQuadri CheGiovanni GiuffridaNessuna valutazione finora
- Ecampus 3Documento2 pagineEcampus 3arianna_marsicoNessuna valutazione finora
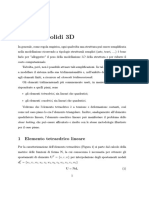
- 9-Elementi 3D LineariDocumento9 pagine9-Elementi 3D LineariMario TodiscoNessuna valutazione finora
- 05.03.31.eqni - Diseqni.pb SolDocumento2 pagine05.03.31.eqni - Diseqni.pb Solannad4liaNessuna valutazione finora
- Trave Letto Di MolleDocumento3 pagineTrave Letto Di MollestobbarthNessuna valutazione finora
- 24-02-05 Parte B - SoluzioniDocumento2 pagine24-02-05 Parte B - SoluzioniAgriIT •Nessuna valutazione finora
- Matrici DeterminantiDocumento16 pagineMatrici DeterminantiSereNessuna valutazione finora
- Corso Di Meccanica Statistica Proff. A. Crisanti e A. Vulpiani Compito Del 14.11.2016Documento5 pagineCorso Di Meccanica Statistica Proff. A. Crisanti e A. Vulpiani Compito Del 14.11.2016Giulio Bacci di CapaciNessuna valutazione finora
- Asta-Disco SoluzioneDocumento10 pagineAsta-Disco Soluzionegiorgiomorandi1966Nessuna valutazione finora
- Esercizi Meccanica PDFDocumento62 pagineEsercizi Meccanica PDFfracescoNessuna valutazione finora
- Formule Calcolo MatricialeDocumento3 pagineFormule Calcolo MatricialeFlaviaDiNapoliNessuna valutazione finora
- 2017 Metodi Esercizi 08 SvoltiDocumento24 pagine2017 Metodi Esercizi 08 SvoltiMichele PassucciNessuna valutazione finora
- Scritto 27-06-2022 SoluzioniDocumento3 pagineScritto 27-06-2022 SoluzioniFilippoNessuna valutazione finora
- Trigonometria PDFDocumento10 pagineTrigonometria PDFmarcoNessuna valutazione finora
- 21 Sintesi Per Tentativi PDFDocumento16 pagine21 Sintesi Per Tentativi PDFGiovanni MenchinellaNessuna valutazione finora
- Esame Fisica Jung 270123Documento12 pagineEsame Fisica Jung 270123Nicole PotenzaNessuna valutazione finora
- Curve Nel PianoDocumento13 pagineCurve Nel PianoElhibari OthmaneNessuna valutazione finora
- Meccanica Lagrangiana RelativisticaDocumento37 pagineMeccanica Lagrangiana RelativisticaGunnar DentNessuna valutazione finora
- Forma Canonica Di JordanDocumento35 pagineForma Canonica Di Jordanmarcopulv19Nessuna valutazione finora
- 2020 18febbraioDocumento6 pagine2020 18febbraioAlberto LanzaNessuna valutazione finora
- Esercitazioni Di Elettrotecnica (Mario Biey)Documento96 pagineEsercitazioni Di Elettrotecnica (Mario Biey)Andrea ValsecchiNessuna valutazione finora
- Circuit LRCDocumento7 pagineCircuit LRCFrandam94Nessuna valutazione finora
- Esame Fisica Jung 251122Documento12 pagineEsame Fisica Jung 251122Nicole PotenzaNessuna valutazione finora
- DETYRE KURSI Teoria e SinjaleveDocumento16 pagineDETYRE KURSI Teoria e SinjaleveErald DemajNessuna valutazione finora
- Maxwell's Equations Ita+EngDocumento27 pagineMaxwell's Equations Ita+EngLeonardo RubinoNessuna valutazione finora
- Linea Elastica Esercizio 6 PDFDocumento2 pagineLinea Elastica Esercizio 6 PDFFabrizio Pollio N47 004460Nessuna valutazione finora
- 6-Elemento TraveDocumento19 pagine6-Elemento TraveMario TodiscoNessuna valutazione finora
- Esercitazione Algebra 1 Torvergata Foglio 8Documento1 paginaEsercitazione Algebra 1 Torvergata Foglio 8Luca Di DioNessuna valutazione finora
- UntitledDocumento5 pagineUntitledVeikoth MarquezNessuna valutazione finora
- 11 Sintesi Fitri AttiviDocumento49 pagine11 Sintesi Fitri AttivisalNessuna valutazione finora
- Elaborato Benna Automatica ChiaveriniDocumento20 pagineElaborato Benna Automatica ChiaveriniLuigi ReveruzziNessuna valutazione finora
- Testi Esame 2017Documento52 pagineTesti Esame 2017DIDIER FEDERICO PERNICINessuna valutazione finora
- ESERCIZI FISICA 2 - P DI SIA (06dic17) PDFDocumento38 pagineESERCIZI FISICA 2 - P DI SIA (06dic17) PDFambaNessuna valutazione finora
- Formule Ricorsive Delle Serie (F, G) Per Il Calcolo Delle Effemeridi Di Un Corpo CelesteDocumento5 pagineFormule Ricorsive Delle Serie (F, G) Per Il Calcolo Delle Effemeridi Di Un Corpo CelesteRitaDelGrilloNessuna valutazione finora
- Lancelotti - Lezioni Di Analisi Matematica II PDFDocumento229 pagineLancelotti - Lezioni Di Analisi Matematica II PDFMarco Buccino100% (1)
- Meccanica Analitica IDocumento21 pagineMeccanica Analitica IEmanuele RomanelliNessuna valutazione finora
- Elecdyn Note3Documento6 pagineElecdyn Note3Dora McNessuna valutazione finora
- Ponti Ad Arco o in Muratura PDFDocumento32 paginePonti Ad Arco o in Muratura PDFgabrieleNessuna valutazione finora
- Lezione: Tecnica Delle CostruzioniDocumento94 pagineLezione: Tecnica Delle CostruzioniAlberto LambertiniNessuna valutazione finora
- 13.curve Nello SpazioDocumento16 pagine13.curve Nello Spaziofluffa23Nessuna valutazione finora
- 16 - Il Metodo Della Doppia Integrazione, o Di Saviotti PDFDocumento17 pagine16 - Il Metodo Della Doppia Integrazione, o Di Saviotti PDFPierpaolo ViggianoNessuna valutazione finora
- 0 2016 02 15 SDC Esame ScrittoDocumento6 pagine0 2016 02 15 SDC Esame Scrittoandrea.alberici1601Nessuna valutazione finora
- Le Travi Ad Una CampataDocumento22 pagineLe Travi Ad Una CampatagiulioNessuna valutazione finora
- 2013 Esame - 07 - Febbraio - Testo e SoluzioniDocumento3 pagine2013 Esame - 07 - Febbraio - Testo e Soluzionisimone28804Nessuna valutazione finora
- Foglio 2 IANDocumento1 paginaFoglio 2 IANnemo woodyNessuna valutazione finora
- Glosario FisicaDocumento35 pagineGlosario Fisicamiguel ibañezNessuna valutazione finora
- Seminari Sulle Vibrazioni Con CertificazioneDocumento8 pagineSeminari Sulle Vibrazioni Con CertificazioneDavide LanzoniNessuna valutazione finora
- Questionario FisicaDocumento1 paginaQuestionario FisicaFrancesco Del VecchioNessuna valutazione finora
- Ripasso Sui Fluidi (Fisica)Documento4 pagineRipasso Sui Fluidi (Fisica)TulliaNessuna valutazione finora
- La teoria della terra cava. The hollow earth theoryDa EverandLa teoria della terra cava. The hollow earth theoryValutazione: 3 su 5 stelle3/5 (1)
- Tecnologia delle biofrequenze (La): radionica e tecniche vibrazionali: nuovi percorsi della medicinaDa EverandTecnologia delle biofrequenze (La): radionica e tecniche vibrazionali: nuovi percorsi della medicinaValutazione: 3.5 su 5 stelle3.5/5 (2)
- Elettrotecnica Generale: Circuiti Elettrici in Regime StazionarioDa EverandElettrotecnica Generale: Circuiti Elettrici in Regime StazionarioNessuna valutazione finora
- La Conoscenza Proibita All'Umanità: L'Energia Della Vita Che L'Uomo Non Deve AvereDa EverandLa Conoscenza Proibita All'Umanità: L'Energia Della Vita Che L'Uomo Non Deve AvereNessuna valutazione finora
- Longevità e Immortalità per Mezzo delle VibrazioniDa EverandLongevità e Immortalità per Mezzo delle VibrazioniValutazione: 5 su 5 stelle5/5 (1)
- Radionica: Studio e pratica della radionica. Completo di 84 circuiti e 7 quadranti inediti pronti da utilizzareDa EverandRadionica: Studio e pratica della radionica. Completo di 84 circuiti e 7 quadranti inediti pronti da utilizzareValutazione: 4 su 5 stelle4/5 (4)
- Nuova Grammatica Latina digitale: con esercizi e appendice metricaDa EverandNuova Grammatica Latina digitale: con esercizi e appendice metricaValutazione: 5 su 5 stelle5/5 (2)
- Ai confini della realtà: Roswell 1947 nuovi aggiornamentiDa EverandAi confini della realtà: Roswell 1947 nuovi aggiornamentiValutazione: 1 su 5 stelle1/5 (1)
- Il concetto di Bisogni Educativi Speciali (BES) e caratterizzazione dei disturbi specifici dell’apprendimento (DSA)Da EverandIl concetto di Bisogni Educativi Speciali (BES) e caratterizzazione dei disturbi specifici dell’apprendimento (DSA)Nessuna valutazione finora
- La Dieta Pareto 80/20: Il Magico Potere del Digiuno intermittente per un fisico magro e una mente intelligenteDa EverandLa Dieta Pareto 80/20: Il Magico Potere del Digiuno intermittente per un fisico magro e una mente intelligenteNessuna valutazione finora
- Esercizi svolti di Matematica: Geometria AnaliticaDa EverandEsercizi svolti di Matematica: Geometria AnaliticaNessuna valutazione finora
- Neuro Quantica Evolutiva: Parlare al cervello quantico e cambiare la propria vitaDa EverandNeuro Quantica Evolutiva: Parlare al cervello quantico e cambiare la propria vitaNessuna valutazione finora
- Esercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoDa EverandEsercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoValutazione: 5 su 5 stelle5/5 (1)
- 9 e 99 - Curiosità e stravaganze nel mondo dei numeriDa Everand9 e 99 - Curiosità e stravaganze nel mondo dei numeriNessuna valutazione finora