Potrebbero piacerti anche
- Omfb ManualDocumento1 paginaOmfb ManualEdison YesidNessuna valutazione finora
- Niveladores Maqs OperatrizesDocumento16 pagineNiveladores Maqs Operatrizesjair nerisNessuna valutazione finora
- Scheda Tecnica Fiat Punto IIDocumento5 pagineScheda Tecnica Fiat Punto IIFrancesco BenedettoNessuna valutazione finora
- A Carraro Axle CA270333Documento216 pagineA Carraro Axle CA270333Tadas SukysNessuna valutazione finora
- Scheda Tecnica Fiat Punto IIDocumento5 pagineScheda Tecnica Fiat Punto IIandylorenziNessuna valutazione finora
- Manual AveoDocumento13 pagineManual AveoRICARDO ARIASNessuna valutazione finora
- Edge Trmmer IT 90 ItalianDocumento12 pagineEdge Trmmer IT 90 ItalianMick StringerNessuna valutazione finora
- ReductoareDocumento238 pagineReductoareCosma FlorinelNessuna valutazione finora
- 2007 Phantom f12 R Ac CiclisticaDocumento45 pagine2007 Phantom f12 R Ac CiclisticamotorolazforcedroidNessuna valutazione finora
- SCAR 4 - GommistiDocumento58 pagineSCAR 4 - GommistiAldo BenedettiNessuna valutazione finora
- Ssu 210Documento12 pagineSsu 210SandeepNessuna valutazione finora
- Pneumatic & Electropneumatic Positioners For Rotary Valves R99E, R99PDocumento6 paginePneumatic & Electropneumatic Positioners For Rotary Valves R99E, R99Ptm5u2rNessuna valutazione finora
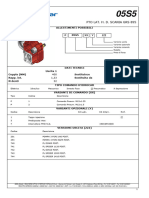
- Catalogo SSU 400 HYDROCARDocumento12 pagineCatalogo SSU 400 HYDROCARРома БлошенкоNessuna valutazione finora
- 2 CQMR 55 Xfumilkn 2 I 892 U 3 Ty 1 Hu 3 K 8 QaDocumento25 pagine2 CQMR 55 Xfumilkn 2 I 892 U 3 Ty 1 Hu 3 K 8 Qaingener.giza2582Nessuna valutazione finora
- Corso Base Sypt Unidrive Control TechniquesDocumento228 pagineCorso Base Sypt Unidrive Control TechniquesGianniNicheliNessuna valutazione finora
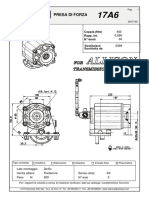
- 17A6Documento2 pagine17A6grineldo84Nessuna valutazione finora
- M0049 Centro 125-160 Ciclistica ITADocumento79 pagineM0049 Centro 125-160 Ciclistica ITAMax FrancardiNessuna valutazione finora
- Service Manual of Axle PDFDocumento180 pagineService Manual of Axle PDFHimani VashishtNessuna valutazione finora
- Retardador VoithDocumento2 pagineRetardador VoithMario LaurieNessuna valutazione finora
- Manuale Officina Malaguti Centro 125Documento80 pagineManuale Officina Malaguti Centro 125z750manual60% (5)
- Caratteristiche Tecniche Caracteristiques TechniquesDocumento1 paginaCaratteristiche Tecniche Caracteristiques TechniquesFabio TemporiniNessuna valutazione finora
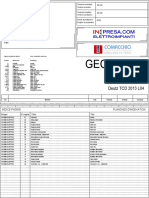
- Impianto ElettricoDocumento19 pagineImpianto ElettricoRenzo De PisisNessuna valutazione finora
- Marelli M16fa655a Varios IdiomasDocumento96 pagineMarelli M16fa655a Varios IdiomasFrancisco GomezNessuna valutazione finora
- Manuale Stazione Di Servizio: PORTER 1.3 16VDocumento892 pagineManuale Stazione Di Servizio: PORTER 1.3 16VbibNessuna valutazione finora
- Catalog Parts Helvi Sprintcar 640Documento3 pagineCatalog Parts Helvi Sprintcar 640AlexNessuna valutazione finora
- PDF 783Documento58 paginePDF 783nicolasNessuna valutazione finora
- Esquemas Eléctricos PDFDocumento188 pagineEsquemas Eléctricos PDFLaurentEuniceNessuna valutazione finora
- D760M PDFDocumento52 pagineD760M PDFMirko NedovicNessuna valutazione finora
- Catalogo SSU 400FF HYDROCARDocumento12 pagineCatalogo SSU 400FF HYDROCARРома БлошенкоNessuna valutazione finora
- Porton EVO1200Documento56 paginePorton EVO1200LUIS MADRIZNessuna valutazione finora
- Duologic PDFDocumento22 pagineDuologic PDFAntinio carlos100% (1)
- Esercizio Albero Statico2PDocumento11 pagineEsercizio Albero Statico2Ptony995Nessuna valutazione finora
- Startup Ace ItDocumento7 pagineStartup Ace Itkeane113Nessuna valutazione finora
- Manuale HM 125 2tDocumento120 pagineManuale HM 125 2tjacopo pisanoNessuna valutazione finora
- PDFDocumento179 paginePDFovercomeboyNessuna valutazione finora
- Manuale Motore Minarelli 2 TempiDocumento35 pagineManuale Motore Minarelli 2 TempiDANTENessuna valutazione finora
- 9.01120 NormazioneDocumento7 pagine9.01120 NormazioneLucaNessuna valutazione finora
- Varispeed F7 DatasheetDocumento18 pagineVarispeed F7 Datasheetmax_ingNessuna valutazione finora
- MF 6350 20.43 572755 ManualDocumento146 pagineMF 6350 20.43 572755 ManualPaulinho InformáticaNessuna valutazione finora
- Sicor WSR 200Documento24 pagineSicor WSR 200Baltija MechanikasNessuna valutazione finora
- PUM-0008 Mounting Instructions Bent Axis Piston Pumps SVDocumento16 paginePUM-0008 Mounting Instructions Bent Axis Piston Pumps SVLuffy Albi FradanaNessuna valutazione finora
- ZLA84400001003754 - LANCIA Delta Manufacturing SheetDocumento2 pagineZLA84400001003754 - LANCIA Delta Manufacturing SheetGiorgio ChousmekeridisNessuna valutazione finora
- Procedure IskraDocumento10 pagineProcedure Iskramirko coppiniNessuna valutazione finora
- Gefran-Cat LIFT 17-6-08 MDocumento64 pagineGefran-Cat LIFT 17-6-08 MRoxanneNessuna valutazione finora
- Elettrico MC15HT 2215 RDocumento24 pagineElettrico MC15HT 2215 RYipper Shnipper100% (1)
- Catalogo Schede Pto Ita HYDROCARDocumento3.078 pagineCatalogo Schede Pto Ita HYDROCARРома БлошенкоNessuna valutazione finora
- Rotor Sat hh100 hh120Documento16 pagineRotor Sat hh100 hh120bksjgbdjNessuna valutazione finora
- Service Manual - SCOM Hypoid AxleDocumento102 pagineService Manual - SCOM Hypoid Axleshyaam sathiyanNessuna valutazione finora
- Carrello Elettrico 13 Q.li e 18 Q.liDocumento6 pagineCarrello Elettrico 13 Q.li e 18 Q.liivoNessuna valutazione finora
- Coppia Di Serraggio BulloneriaDocumento2 pagineCoppia Di Serraggio BulloneriaoslatNessuna valutazione finora
- D8 Fce - PDF 20160601095638Documento2 pagineD8 Fce - PDF 20160601095638Milovan TasicNessuna valutazione finora
- Scheda Tecnica 2177046 Finder 800102400000 Rele Temporizzato Multifunzionale 10 PZ Intervallo Di Tempo 24 H Max 1 Scambio TrayDocumento10 pagineScheda Tecnica 2177046 Finder 800102400000 Rele Temporizzato Multifunzionale 10 PZ Intervallo Di Tempo 24 H Max 1 Scambio TrayManuNessuna valutazione finora
- AFFIDABILITA 06 Casi-LG - IT PDFDocumento17 pagineAFFIDABILITA 06 Casi-LG - IT PDFLudovicoVicoNessuna valutazione finora
- FJR 1300 Versione Polizia 2013Documento102 pagineFJR 1300 Versione Polizia 2013Saul ManzoniNessuna valutazione finora
- Elettrico GEO900EX 2835 QMDocumento25 pagineElettrico GEO900EX 2835 QMchida mohaNessuna valutazione finora
- IB8001ITDocumento1 paginaIB8001ITEUGENIONessuna valutazione finora
- TT2119 EditabileDocumento8 pagineTT2119 EditabileHCfighterNessuna valutazione finora
- 2015 Akron Malo Full Upd Catalog PDFDocumento149 pagine2015 Akron Malo Full Upd Catalog PDFEvginiy ShevchenkoNessuna valutazione finora
- Ni An9888Documento7 pagineNi An9888saleteedgarNessuna valutazione finora
- Guida Acquisto Per Sistemi Storage GrowattDocumento30 pagineGuida Acquisto Per Sistemi Storage GrowattPetrisor FilipNessuna valutazione finora
- 01 Aggiornamento Corso FER - Unità Didattica 2 - Parte GeneraleDocumento26 pagine01 Aggiornamento Corso FER - Unità Didattica 2 - Parte GeneraleMarco di martinoNessuna valutazione finora
- A Cosa Serve Un TeleruttoreDocumento4 pagineA Cosa Serve Un TeleruttoreGiuseppe Lo GiudiceNessuna valutazione finora
- FotovoltaicDocumento70 pagineFotovoltaicGianniNessuna valutazione finora
- CUENOD Scheda Tecnica Bruciatori Gas C24 C30 GX107 GX207Documento9 pagineCUENOD Scheda Tecnica Bruciatori Gas C24 C30 GX107 GX207Eden BenNessuna valutazione finora
- 1SDH000460R0001Documento161 pagine1SDH000460R0001Dorian GomezNessuna valutazione finora
- Lovato TMP Timer RelayDocumento2 pagineLovato TMP Timer RelayIBRAHIM AL-SURAIHINessuna valutazione finora