Potrebbero piacerti anche
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- 21321A1 Cambio Conduttori Annotazioni Verifica PoligonaliDocumento7 pagine21321A1 Cambio Conduttori Annotazioni Verifica PoligonaliStefano Babai MancinNessuna valutazione finora
- Es (Albero Perni)Documento2 pagineEs (Albero Perni)Paride ToselliNessuna valutazione finora
- 1.1 - RUOTE Di FrizioneDocumento13 pagine1.1 - RUOTE Di Frizionedpiperis1118Nessuna valutazione finora
- Bulloni Ad Alta Resistenza e Giunzioni Ad AttritoDocumento7 pagineBulloni Ad Alta Resistenza e Giunzioni Ad AttritoGiuseppe GentileNessuna valutazione finora
- Costruzioni Di AcciaioDocumento28 pagineCostruzioni Di AcciaioMario MereniNessuna valutazione finora
- Costruzione Macchine Vol1Documento177 pagineCostruzione Macchine Vol1silvano andornoNessuna valutazione finora
- Eser3 1Documento6 pagineEser3 1Lkh dmtNessuna valutazione finora
- 10 - Unioni Bullonate e SaldateDocumento26 pagine10 - Unioni Bullonate e SaldateFabioNessuna valutazione finora
- Sollecitazioni GalleriaDocumento12 pagineSollecitazioni GalleriaChiara MarchinoNessuna valutazione finora
- 1464 2015 396 23622 PDFDocumento25 pagine1464 2015 396 23622 PDFAnonymous 1aHRPIIFfINessuna valutazione finora
- Dispense Costruzione Di Macchine Vol.1 - AndornoDocumento211 pagineDispense Costruzione Di Macchine Vol.1 - AndornoPierluigi RomanoNessuna valutazione finora
- Pilastri Instabilità Colonna Modello PDFDocumento22 paginePilastri Instabilità Colonna Modello PDFAleksiey PellicciaNessuna valutazione finora
- Innesti & Frizioni PDFDocumento8 pagineInnesti & Frizioni PDFDario BenedettiNessuna valutazione finora
- ORGANIDIMACCHINEDocumento6 pagineORGANIDIMACCHINEbee1406763181Nessuna valutazione finora
- Dispense Costruzione Di Macchine Vol.1 - AndornoDocumento211 pagineDispense Costruzione Di Macchine Vol.1 - AndornoAnonymous f3iGLjx100% (1)
- Collegamenti Bullonati e SaldatiDocumento7 pagineCollegamenti Bullonati e SaldatiAlejandro CarosiNessuna valutazione finora
- Hertz SoluzioniDocumento13 pagineHertz SoluzioniGianluca SantagataNessuna valutazione finora
- E08 Patran 2DDocumento5 pagineE08 Patran 2DDavid BrandãoNessuna valutazione finora
- ECM 3 HertzDocumento5 pagineECM 3 HertzMichelangelo GiuffridaNessuna valutazione finora
- Mec 5 Perni SezioniDocumento7 pagineMec 5 Perni SezioniStefano BustiniNessuna valutazione finora
- Recipienti e DischiDocumento42 pagineRecipienti e DischiAlessio DimastrogiovanniNessuna valutazione finora
- Con TenDocumento4 pagineCon TensignormitariNessuna valutazione finora
- Es Albero PuleggiaDocumento7 pagineEs Albero PuleggiaMichele AssirelliNessuna valutazione finora
- Tubi e Recipienti in PressioneDocumento11 pagineTubi e Recipienti in PressionelucaNessuna valutazione finora
- BullonatureDocumento13 pagineBullonatureCristian PastinoNessuna valutazione finora
- Piastre PDFDocumento43 paginePiastre PDFroccia1989Nessuna valutazione finora
- La Verifica Agli Stati Limite Delle Unioni in Legno PDFDocumento10 pagineLa Verifica Agli Stati Limite Delle Unioni in Legno PDFAlessandro MenichelliNessuna valutazione finora
- Biella e 1.0Documento5 pagineBiella e 1.0SamueleNessuna valutazione finora
- Linea ElasticaDocumento12 pagineLinea ElasticaVirgilio TinariNessuna valutazione finora
- Cilindri in PressioneDocumento10 pagineCilindri in PressionepamelaNessuna valutazione finora
- Esercizio Calcolo Albero Ruota Conica 2PDocumento11 pagineEsercizio Calcolo Albero Ruota Conica 2PAntonio D'AmatoNessuna valutazione finora
- Cap EstensimetriDocumento7 pagineCap EstensimetriArmando_84Nessuna valutazione finora
- Appello Mam SvoltoDocumento5 pagineAppello Mam Svoltomattia De CiccoNessuna valutazione finora
- Meccanica Approfondimenti Piero PierottiDocumento17 pagineMeccanica Approfondimenti Piero PierottiRoby MastreNessuna valutazione finora
- Molle 0Documento10 pagineMolle 0signormitariNessuna valutazione finora
- Soluzione Es 3Documento21 pagineSoluzione Es 3LeonardoMadeira11Nessuna valutazione finora
- Sforzo Normale e Momento Flettente, Elio SaccoDocumento10 pagineSforzo Normale e Momento Flettente, Elio SaccoAntonio CiusaNessuna valutazione finora
- Esercizi Sulle Molle Ad Elica CilindricaDocumento12 pagineEsercizi Sulle Molle Ad Elica CilindricaDav89Nessuna valutazione finora
- Costruzione Di Macchine - Recipienti MultistratoDocumento11 pagineCostruzione Di Macchine - Recipienti MultistratoMichele MolissoNessuna valutazione finora
- 9 TaglioDocumento15 pagine9 TagliostaedtlerpNessuna valutazione finora
- 4 Classe ESERCIZIDocumento27 pagine4 Classe ESERCIZIgiuseppe baldassarreNessuna valutazione finora
- 13028-Membrane Di Rivoluzione Con Carichi AssialsimmetriciDocumento6 pagine13028-Membrane Di Rivoluzione Con Carichi AssialsimmetriciGiuseppe FaillaNessuna valutazione finora
- Colonna ModelloDocumento22 pagineColonna ModelloRubino Vincenzo0% (1)
- Lastre PianeDocumento43 pagineLastre PianeandreahankNessuna valutazione finora
- MAP Es 6Documento5 pagineMAP Es 6Francesco Provenzano100% (2)
- Flessione PDFDocumento33 pagineFlessione PDFpina.maisto9Nessuna valutazione finora
- Verifica RecipientiDocumento26 pagineVerifica RecipientiAlessio DimastrogiovanniNessuna valutazione finora
- Generalità Sui GanciDocumento8 pagineGeneralità Sui Gancialigi33Nessuna valutazione finora
- Collegamenti Smontabili Non FilettatiDocumento84 pagineCollegamenti Smontabili Non Filettativito200049Nessuna valutazione finora
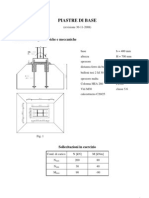
- Piastre Di BaseDocumento11 paginePiastre Di BasecersimoneNessuna valutazione finora
- CA Capitolo 09 PDFDocumento5 pagineCA Capitolo 09 PDFr_zoro87Nessuna valutazione finora
- Esercizi di matematica: equazioni integrali e integro-differenzialiDa EverandEsercizi di matematica: equazioni integrali e integro-differenzialiNessuna valutazione finora
- (CHESS-SCACCHI) Piccolo Manuale Di Aperture Scacchistiche in ItalianoDocumento65 pagine(CHESS-SCACCHI) Piccolo Manuale Di Aperture Scacchistiche in ItalianoAlberto Loi100% (1)
- Robust Control Sistemi MeccatroniciDocumento31 pagineRobust Control Sistemi MeccatroniciantoNo1Nessuna valutazione finora
- Elementi FinitiDocumento37 pagineElementi Finitiman88gioNessuna valutazione finora
- Svol Max Min AssolutiDocumento29 pagineSvol Max Min AssolutiAnonymous ArybDnR8bNessuna valutazione finora
- Helicoil Plus It PDFDocumento50 pagineHelicoil Plus It PDFantoNo1Nessuna valutazione finora
- 11-Inflessioni Delle Travi V1-1 PDFDocumento30 pagine11-Inflessioni Delle Travi V1-1 PDFFerruccio RossiNessuna valutazione finora
- Helicoil Plus It PDFDocumento50 pagineHelicoil Plus It PDFantoNo1Nessuna valutazione finora
- Don GiovanniDocumento32 pagineDon GiovanniantoNo1Nessuna valutazione finora
- 1975 Fermentazioni AlcolicheDocumento37 pagine1975 Fermentazioni AlcolicheLucia LisciNessuna valutazione finora
- Jules Verne - La Scuola Dei RobinsonDocumento188 pagineJules Verne - La Scuola Dei Robinsonfulvix88Nessuna valutazione finora
- Autorizzazione Offline Di Ableton LiveDocumento1 paginaAutorizzazione Offline Di Ableton LiveFrancesco Groovisionary CapuaniNessuna valutazione finora
- Lezione07 DivideImpera RicercaBinaria MergeSortDocumento56 pagineLezione07 DivideImpera RicercaBinaria MergeSortsmegmusNessuna valutazione finora
- Manuale Tecnico Macchinisti Impianti A Fune.1686834618Documento148 pagineManuale Tecnico Macchinisti Impianti A Fune.1686834618Agnichandra SubediNessuna valutazione finora
- Catalogo Guias Ttes. BettDocumento18 pagineCatalogo Guias Ttes. BettMarcelo ResckNessuna valutazione finora
- 04 Comportamento FondamentiDocumento7 pagine04 Comportamento FondamentiingssNessuna valutazione finora