Potrebbero piacerti anche
- Formulario Fisica 1Documento15 pagineFormulario Fisica 1Matt Compierchio100% (1)
- Scienza Delle Costruzioni - Prof Elio SaccoDocumento112 pagineScienza Delle Costruzioni - Prof Elio SaccoMario SabatinoNessuna valutazione finora
- Il Principio Dei Lavori Virtuali Ed Il Procedimento Di LagrangeDocumento15 pagineIl Principio Dei Lavori Virtuali Ed Il Procedimento Di LagrangeTONYNessuna valutazione finora
- Lastre Piane TDC LMDocumento28 pagineLastre Piane TDC LMteocomiNessuna valutazione finora
- Esercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoDa EverandEsercizi di fisica 1: meccanica, cinematica, dinamica, piano inclinato, vettori, gravitazione, forze di attrito, forza elastica, leggi di conservazione, moto armonico, corpo rigidoValutazione: 5 su 5 stelle5/5 (1)
- Problema Di StokesDocumento40 pagineProblema Di StokesGunnery HartmanNessuna valutazione finora
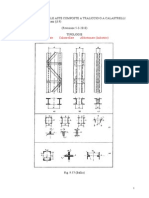
- TorsioneDocumento20 pagineTorsioneMarcoNessuna valutazione finora
- Dispense Centro Di TaglioDocumento7 pagineDispense Centro Di TaglioAntonio RizzoneNessuna valutazione finora
- Linea ElasticaDocumento12 pagineLinea ElasticaVirgilio TinariNessuna valutazione finora
- Instabilità A Carico Di PuntaDocumento27 pagineInstabilità A Carico Di Puntabigmarck123Nessuna valutazione finora
- L'equazione Differenziale Della Linea ElasticaDocumento11 pagineL'equazione Differenziale Della Linea ElasticaPaolo BirattaNessuna valutazione finora
- Capitolo 03 PDFDocumento18 pagineCapitolo 03 PDFGiovanniCuocoNessuna valutazione finora
- Flessione RettaDocumento57 pagineFlessione RettaDavide MaranoNessuna valutazione finora
- La Teoria Di Timoshenko Per La Trave TozzaDocumento15 pagineLa Teoria Di Timoshenko Per La Trave TozzaNicola TomasiNessuna valutazione finora
- Nozioni Di Geometria DifferenzialeDocumento199 pagineNozioni Di Geometria DifferenzialeGiamaicoNessuna valutazione finora
- Linea ElasticaDocumento180 pagineLinea ElasticaMarco LeonoriNessuna valutazione finora
- Travi CurveDocumento4 pagineTravi CurvePippo FrancoNessuna valutazione finora
- 06-Tensioni Nelle Travi V1-6Documento33 pagine06-Tensioni Nelle Travi V1-6Alessandro Riposi100% (1)
- MolleDocumento10 pagineMolleorpheus984Nessuna valutazione finora
- FlessioneDocumento8 pagineFlessioneMarioTodiscoNessuna valutazione finora
- Cap EstensimetriDocumento7 pagineCap EstensimetriArmando_84Nessuna valutazione finora
- Mec 5 Perni SezioniDocumento7 pagineMec 5 Perni SezioniStefano BustiniNessuna valutazione finora
- 2023-09-20Documento6 pagine2023-09-20fabio.feruglioNessuna valutazione finora
- MolleDocumento11 pagineMollesteNessuna valutazione finora
- Metodo Degli Spostamenti - RichiamiDocumento8 pagineMetodo Degli Spostamenti - RichiamifollettostancoNessuna valutazione finora
- I Carichi Assiali Sulle TraviDocumento15 pagineI Carichi Assiali Sulle TravifrecciaaaNessuna valutazione finora
- Bending of BeamsDocumento27 pagineBending of Beamsgabrielitos7891Nessuna valutazione finora
- Costruzioni Di AcciaioDocumento28 pagineCostruzioni Di AcciaioMario MereniNessuna valutazione finora
- SC Costruz Cornetti Soluz Lez 44Documento7 pagineSC Costruz Cornetti Soluz Lez 44Antonella FabrizioNessuna valutazione finora
- Flessione PDFDocumento33 pagineFlessione PDFpina.maisto9Nessuna valutazione finora
- Cap-9 Moti Di Lento Scorrimento PDFDocumento12 pagineCap-9 Moti Di Lento Scorrimento PDFAgus AlexandriNessuna valutazione finora
- Travi Su Suolo Alla Winkler (Fabio Di Trapani)Documento14 pagineTravi Su Suolo Alla Winkler (Fabio Di Trapani)Raducanu Theodor100% (1)
- Trave Su Suolo ElasticoDocumento10 pagineTrave Su Suolo ElasticoPaoloGavardiNessuna valutazione finora
- Disp 13Documento27 pagineDisp 13riccecriNessuna valutazione finora
- 1 Liv 22 SDocumento10 pagine1 Liv 22 SYumeko JabamiNessuna valutazione finora
- Piastre PDFDocumento43 paginePiastre PDFroccia1989Nessuna valutazione finora
- Lezione 10 - Tensioni Principali e Direzioni Principali Di TensioneDocumento5 pagineLezione 10 - Tensioni Principali e Direzioni Principali Di TensionemarcopasottiNessuna valutazione finora
- Lezione16 Aste ComposteDocumento18 pagineLezione16 Aste ComposteAndreaMercuriNessuna valutazione finora
- Eera Manuale ItaDocumento20 pagineEera Manuale ItaginoNessuna valutazione finora
- Equazioni Del Moto e Condizioni Al ContornoDocumento6 pagineEquazioni Del Moto e Condizioni Al ContornoCarmine CacchioneNessuna valutazione finora
- Costruzioni in Acciaio Carico Di Punta Aste ComposteDocumento18 pagineCostruzioni in Acciaio Carico Di Punta Aste CompostebeppeNessuna valutazione finora
- Trave Su Suolo ElasticoDocumento13 pagineTrave Su Suolo ElasticoevvivaevvivaevvaiNessuna valutazione finora
- Caratteristiche SollecitazioneDocumento26 pagineCaratteristiche SollecitazioneHULIOSMELLANessuna valutazione finora
- La Deformazione Elastica Delle TraviDocumento44 pagineLa Deformazione Elastica Delle TraviAdrian Seidelman100% (1)
- Lezione 37 - La Teoria Di Timoshenko Per La Trave TozzaDocumento15 pagineLezione 37 - La Teoria Di Timoshenko Per La Trave TozzaperosuttoneNessuna valutazione finora
- Cilindri in PressioneDocumento14 pagineCilindri in PressioneMaurizio La VillettaNessuna valutazione finora
- Fondazioni Di Macchine VibrantiDocumento5 pagineFondazioni Di Macchine VibrantimaztortonNessuna valutazione finora
- I Corollari Di Mohr Per Il Calcolo Degli SpostamentiDocumento15 pagineI Corollari Di Mohr Per Il Calcolo Degli SpostamentiLorenzo CaniparoliNessuna valutazione finora
- Esercizi CM InteressantiDocumento13 pagineEsercizi CM InteressantiantoNo1Nessuna valutazione finora
- 01AULNX OD 2023 24 Slides Cap13Documento92 pagine01AULNX OD 2023 24 Slides Cap13Luca CorNessuna valutazione finora
- Esercizi Di ElettrostaticaDocumento10 pagineEsercizi Di ElettrostaticaGiulia IetroNessuna valutazione finora
- CA Sezione A TDocumento6 pagineCA Sezione A Tabcd12345Nessuna valutazione finora
- Esercizi Risolti (CONTINUI)Documento40 pagineEsercizi Risolti (CONTINUI)castibraNessuna valutazione finora
- Gasdinamica NumericaDocumento65 pagineGasdinamica Numericamaurizio.desio4992Nessuna valutazione finora
- La seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Da EverandLa seconda prova di matematica e fisica: svolgimento commentato delle prove ufficiali 2019Nessuna valutazione finora
- Omografia: Omografia: trasformazioni nella visione artificialeDa EverandOmografia: Omografia: trasformazioni nella visione artificialeNessuna valutazione finora
- Trasformazione affine: Sbloccare le prospettive visive: esplorare la trasformazione affine nella visione artificialeDa EverandTrasformazione affine: Sbloccare le prospettive visive: esplorare la trasformazione affine nella visione artificialeNessuna valutazione finora
- IngleseDocumento28 pagineIngleseΜΙΧΑΛΗΣ ΤΖΩΡΑΚΑΚΗΣNessuna valutazione finora
- Esercizi6 KpsDocumento2 pagineEsercizi6 KpsGilberto PantolfiNessuna valutazione finora
- Il Paradosso Di Achille e La TartarugaDocumento2 pagineIl Paradosso Di Achille e La TartarugabubblesoapNessuna valutazione finora
- Polito - Esercizi Svolti Di Elettrotecnica - M. GilliDocumento96 paginePolito - Esercizi Svolti Di Elettrotecnica - M. Gillip0rt4Nessuna valutazione finora
- Ferroli DomicompactDocumento8 pagineFerroli DomicompactJesusraNessuna valutazione finora
- CLSDocumento26 pagineCLSvirgus87Nessuna valutazione finora
- Programma Chimica EdileDocumento4 pagineProgramma Chimica EdileJulioCallocchiaNessuna valutazione finora
- GEOMETRIA ANALITICA-teoriaDocumento5 pagineGEOMETRIA ANALITICA-teoriagiuseppe.manara2029Nessuna valutazione finora
- 07.01 Info Saldatura Di Riparazione 2014-05-19Documento2 pagine07.01 Info Saldatura Di Riparazione 2014-05-19slowmosquitoNessuna valutazione finora