Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Sistemi Di Dissipazione Passiva
Caricato da
filoconti88Titolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Sistemi Di Dissipazione Passiva
Caricato da
filoconti88Copyright:
Formati disponibili
Capitolo 2
Sistemi di Protezione Sismica
2.1 Quadro normativo
Il quadro normativo attualmente pi avanzato in Italia, contenuto nelle
Norme Tecniche per le Costruzioni (NTC 08) e le sue Circolari applicative,
non offre criteri di dimensionamento, analisi e verifica dei sistemi per la
dissipazione dellenergia sebbene tali tecniche siano comprese nel numero di
quelle che possono essere applicate nel caso di adeguamento sismico di edifici
esistenti.
Le linee guida per limplementazione di dispositivi di dissipazione
dellenergia nelle nuove costruzioni sono state proposte per la prima volta dal
SEAONC (Structural Engineers Association of Nothern California) per fornire
indicazioni agli ingegneri strutturali, alle imprese e alle autorit di
regolamentazione che sono stati incaricati di attuare tali dispositivi in strutture
a telaio (Ramirez et. al, 2001). Queste linee guida sono state preparate in
risposta al crescente interesse mostrato per i dissipatori, in seguito agli estesi
danni dovuti al terremoto di Loma Prieta nel nord della California del 1989 e
allemergere di fornitori che producevano tali dispositivi. Lintento degli autori
di quel documento era di indirizzare la dissipazione dellenergia indotta dal
terremoto, dagli elementi del sistema resistente ai carichi verticali ai dispositivi
di smorzamento, riducendo in tal modo i costi di riparazione e dinterruzione
delle attivit che seguono gli eventi sismici di alta intensit.
Nella met degli anni 90, la Federal Emergency Management Agency
(FEMA) finanzi lo sviluppo di linee guida per la riabilitazione sismica degli
edifici. Quattro nuovi metodi di analisi e valutazione sismica delle strutture
erano presenti nelle NEHRP Guidelines for the Seismic Rehabilitation of
Building (FEMA Reports 273 e 274, 1997): (1) procedura statica lineare, (2)
procedura dinamica lineare, (3) procedura statica non lineare e (4) procedura
Sistemi di protezione sismica
dinamica non lineare. Tutti e quattro i metodi erano basati sugli spostamenti e
tutti direttamente o indirettamente facevano uso delle informazioni legati agli
spostamenti per il controllo delle componenti strutturali (rappresentando un
cambiamento nella filosofia di progettazione sismica, spostando il centro di
analisi, progetto e valutazione dalle forze agli spostamenti). Per quanto
riguarda le strutture che incorporano sistemi di dissipazione dellenergia, i
principi base da seguire includevano: distribuzione spaziale dei dissipatori (ad
ogni piano e ad ogni lato della struttura); una ridondanza di dissipatori (almeno
due dispositivi lungo la stessa linea dazione); i dispositivi e le loro connessioni
progettati per il maximum considered earthquake; e gli elementi che
trasmettono le forze dei dissipatori alla fondazione progettati per rimanere
elastici.
Il quadro normativo attuale sui sistemi di dissipazione dellenergia
basato quindi dai documenti americani prodotti dalla Federal Emergency
Management Agency (FEMA), in particolare dalla FEMA 356 e FEMA 450. Il
primo documento FEMA 356 (Prestandard and Commentary for the Seismic
Rehabilitation of Buildings) accoglie il tema dei sistemi dissipativi energetici
nel
Capitolo
9.3
suddividendoli
in
tre
categorie,
come
disposto
precedentemente dalle FEMA 273 e 274:
- dispositivi con funzionamento legato allo spostamento;
- dispositivi con funzionamento legato alla velocit;
- altri dispositivi.
Per lanalisi di strutture dotate di sistemi di dissipazione dellenergia
sono ammesse procedure sia lineare sia non lineari. Se per le procedure di
analisi non lineare non sono riportate restrizioni ai metodi previsti per strutture
ordinarie, per le procedure lineari richiesto che ricorrano determinate
circostanze, in particolare:
-
che le componenti strutturali del sistema principale non sono soggette a
plasticizzazioni, rimanendo quindi in campo elastico;
32
Sistemi di protezione sismica
che lo smorzamento apportato dai dispositivi al periodo fondamentale
non eccede il 30% dello smorzamento critico;
che la rigidezza secante di ogni dispositivo, valutata per il massimo
spostamento inclusa nel modello matematico delledificio oggetto
dellintervento;
che nella valutazione delle regolarit strutturali deve essere considerata
la presenza dei dissipatori.
Il documento FEMA 450 (NEHRP Recommended Provisions for Seismic
Regolations for New Buildings and other Structures) contiene, recependo i
precedenti report FEMA 356 e FEMA 273, la classificazione dei sistemi di
dissipazione, le procedure di analisi e i limiti. La filosofia progettuale consiste
nel raggiungere un obiettivo prestazionale prestabilito, attraverso lutilizzo di
sistemi di dissipazione dellenergia. Il modello strutturale deve tenere conto
delleffetto dei sistemi di dissipazione e dellaumento eventuale di rigidezza
laterale del sistema. Nel Capitolo 4 si approfondir la procedura danalisi
utilizza nella tesi, costituita dal metodo di analisi statica non lineare applicata a
strutture duttili dotate di dissipatori fluido viscosi non lineari.
Il documento base per la redazione di questo studio il Report
MCEER-00-0010, Development and Evaluation of Simplified Procedures for
Analysis and Design of Buildings with Passive Energy Dissipation System,
pubblicato dallUniversit di Buffalo (2000), che ha permesso lo sviluppo dei
procedimenti di progetto per strutture con sistemi di dissipazione passiva
previsti dalle attuali FEMA.
33
Sistemi di protezione sismica
2.2 Introduzione ai Sistemi di Protezione Sismica
Dissipazione dellenergia e isolamento sismico possono essere
classificati in diverse categorie di sistemi di protezione sismica, come mostrato
in Tabella 2.1 (Christopoulos e Filiatrault, 2006). Ogni gruppo sfrutta un
approccio diverso per mitigare gli effetti dei terremoti sulle strutture:
Sistemi
convenzionali
Cerniere Plastiche a
Flessione
Cerniere Plastiche a
Taglio
Controventi
eccentrici
Sistemi di dissipazione dellenergia
Dissipatori passivi
Dissipatori Attivi/
isolamento
Semi-Attivi
Metallici
Controventi
Ad Attrito
A Massa Accordata
Viscoelastici
Variable Stiffness
Viscosi
Sistemi di
A smorzamento
variabile
Elastomerici
Elastomerici con
Anima in Piombo
Elastomerici
Armati
Metallici
A Massa Accordata
Piezoelettrici
Piombo Estruso
Auto-centranti
Reologici
Pendolo ad Attrito
Tabella 2.1 Sistemi di protezione sismica
I sistemi convenzionali si basano sulla tradizionale progettazione
antisismica dissipando energia attraverso stabili meccanismi inelastici. Un
esempio di questi sistemi sono la plasticizzazione flessionale di travi,
colonne e pareti, con snervamento a trazione e deformazione a
compressione degli elementi di controvento e plasticizzazione a taglio negli
elementi dacciaio (Christopoulos e Filiatrault, 2006). Questi meccanismi di
dissipazione energetica possono giungere a buone performance sismiche, se
utilizzati con appropriati criteri, propri della gerarchia delle resistenze
(capacity design). Comunque, lenergia isteretica utilizzata per dissipare
lenergia sismica in entrata corrisponde direttamente, in questi sistemi, ad
34
Sistemi di protezione sismica
un danno strutturale ed tollerata fino a che non compromessa la capacit
di portare i carichi verticali.
-
I sistemi con dissipatori di energia sono speciali dispositivi
che vengono attivati dal movimento della struttura principale e
riducono la risposta dinamica globale durante un terremoto. Gli
elementi principali della struttura sono protetti divergendo lenergia
in entrata verso questi dispositivi meccanici, i quali possono essere
ispezionati o addirittura sostituiti in seguito ad un evento sismico
(Christopoulos e Filiatrault, 2006). Idealmente, se tutta lenergia
sismica assorbita dal dissipatore, la struttura principale non
danneggiata. I sistemi con dissipatori di energia si suddividono in
due categorie: sistemi passivi e sistemi attivi/semi-attivi. I sistemi di
dissipazione
passiva
dellenergia
dissipano
una
porzione
dellenergia sismica in entrata senza risorse elettriche esterne come
attuatori, alimentatori, computer ecc., necessari per una tecnologia
di controllo attiva.
-
Un altro sistema di protezione sismica caratterizzato dal
limitare la trasmissione dellenergia sismica alla struttura principale.
Si tratta dei sistemi disolamento sismico che richiedono
linstallazione disolatori sotto i punti di sostegno di una struttura.
Per gli edifici, gli isolatori sono solitamente allocati tra la
sovrastruttura e le fondazioni mentre per i ponti sono introdotti tra
limpalcato e i sostegni verticali. Gli isolatori, progettati per avere
una rigidezza laterale molto minore della sovrastruttura, allungando
in tal modo il periodo fondamentale della struttura isolata, separano
la struttura principale dagli elementi strutturali connessi al terreno.
Idealmente, se non venisse trasmessa alcuna energia alla
sovrastruttura,
essa
rimarrebbe
letteralmente
non
soggetta
allattacco sismico (Christopoulos e Filiatrault, 2006).
35
Sistemi di protezione sismica
2.3 Tipi di sistemi di dissipazione passiva
Diversi dispositivi di dissipazione passiva sono disponibili e
implementati in tutto il mondo per la protezione sismica delle strutture. Come
mostrato in Tabella 2.2, possono essere suddivisi in tre diverse categorie, anche
in relazione a quanto riportato nelle FEMA.
Displeacement-Activated
Velocity-Activated
Motion-Activated
Dissipatori Metallici
Dissipatori Viscosi
Dissipatori a Massa
Accordata
Dissipatori ad Attrito
Dissipatori Auto-centranti
Dissipatori viscoelastici plastici
Tabella 2.2: Categorie dei sistemi di dissipazione passiva
dispositivi
displeacement-activated,
ovvero
attivati
con
lo
spostamento, dissipano energia attraverso gli spostamenti relativi che si
verificano tra i propri punti di connessione. Questi dispositivi solitamente sono
indipendenti dalla frequenza del moto. Inoltre, le forze che generano sugli
elementi strutturali sono in fase con le forze interne provocate dal moto, quindi
la massima forza generata dal dissipatore avviene contemporaneamente con la
massima forza interna che si verifica al termine del ciclo di vibrazione
corrispondente al picco di deformazione transitorio della struttura. Tipici
dissipatori che ricadono in questa categoria sono i dissipatori metallici, ad
attrito e i dispositivi autocentranti (Christopoulos e Filiatrault, 2006).
I dispositivi velocity-activated, ovvero attivati con la velocit, dissipano
energia attraverso le velocit relative che si verificano tra i propri punti di
connessione. La risposta forza-spostamenti di questi dissipatori dipendono
solitamente dalla frequenza del moto. Inoltre, le forze che generano sulla
struttura sono fuori fase con le forze interne provocate dal moto, quindi la forza
massima generata dal dissipatore non avviene contemporaneamente con il
36
Sistemi di protezione sismica
picco di deformazione transitorio della struttura. Questo si traduce in una pi
bassa forza di progetto per gli elementi strutturali in cui i dispositivi sono
installati come in una pi bassa forza di progetto per le fondazioni. Tipici
dispositivi che ricadono in questa categoria sono i dissipatori viscosi e
viscoelastici (Christopoulos e Filiatrault, 2006).
I dispositivi motion-activated, ovvero attivati dal moto della struttura,
disturbano il flusso di energia nella struttura attraverso la vibrazione di un
sistema secondario. Un esempio sono i dissipatori a massa accordata (Tuned
Mass Damper, TMD), costituiti da un sistema massa-molla che risuona alla
stessa frequenza della struttura principale ma fuori fase rispetto ad essa,
divergendo quindi lenergia in ingresso dalla struttura portante a se stessa.
37
Sistemi di protezione sismica
2.4 Dissipatori metallici e ad attrito (isteretici)
I dissipatori metallici e ad attrito appartengono alla categoria dei sistemi
di dissipazione attivati dallo spostamento relativo dei punti di connessione. Per
dissipare energia, i dissipatori metallici contano sul comportamento
dellacciaio quando si deforma oltre il limite elastico, mentre i dissipatori ad
attrito sfruttano appunto lattrito che si sviluppa tra due corpi solidi che
scorrono relativamente uno sullaltro (Christopoulos e Filiatrault, 2006).
Entrambi esibiscono un comportamento isteretico che pu essere idealizzato da
una relazione forza-spostamento elasto-perfettamente plastica, come mostrato
in Figura 2.1.
Figura 2.1 Relazione idealizzata forza-spostamento per dissipatori isteretici
Per un dissipatore metallico, il carico Fa in Figura 2.1 il carico che
attiva il dissipatore, che corrisponde al carico di snervamento del dissipatore.
Per un dissipatore ad attrito invece, il carico Fa corrisponde al carico di
slittamento del dissipatore. Si fa notare inoltre che per la maggior parte dei
dissipatori ad attrito la rigidezza elastica, coefficiente angolare della retta di
carico in fase elastica, solitamente molto ripida e il comportamento
preferibile associarlo con una risposta rigido-perfettamente plastica.
Analizzando la risposta per un carico ciclico in entrambe le tipologie di
dispositivi, si nota che essa rimane essenzialmente invariata al variare della
frequenza di eccitazione, confermando lindipendenza dalla velocit.
Comunque, questi dissipatori sono non lineari poich la forza prodotta
chiaramente non scalata con lo spostamento, evidenziando una significativa
dipendenza dal percorso di carico.
38
Sistemi di protezione sismica
2.4.1 Dissipatori metallici
Principi base
Come gi anticipato, la deformazione inelastica dei metalli il
meccanismo sfruttato da questo tipo di dissipatori per dissipare lenergia in
ingresso del sisma. La risposta di un acciaio dolce soggetto ad un carico
monoassiale monotono illustrata in Figura 2.2 (a) (Soong e Dargush, 1997).
Figura 2.2 Risposta tensione-deformazione dellacciaio strutturale
Si tratta del classico comportamento di un provino di acciaio sottoposto
a trazione che comprende la comparsa di uno snervamento superiore ed
inferiore, un tratto orizzontale con incremento di deformazione a carico
costante e infine un tratto di indurimento. In Figura 2.2 (b) raffigurata la
risposta a carico ciclico con ampiezza costante a deformazione controllata. Per
una data ampiezza, si ottiene una curva stabile che indipendente dalla
precedente storia di carico. A differenza del comportamento sotto carico
monoassiale, il materiale caricato anche nella direzione opposta ed una volta
che si inverte il carico si snerva ad una tensione pi bassa della tensione di
snervamento. Questo effetto noto come effetto Bauschinger e diviene sempre
pi pronunciato allaumentare della deformazione massima.
Si formano cicli di dissipativi o cicli isteretici nei quali il materiale
sollecitato oltre il suo limite elastico. Larea allinterno della curva tensione-
39
Sistemi di protezione sismica
deformazione corrisponde allenergia isteretica dissipata per unit di volume
che viene irradiata sotto forma di calore.
Esempi applicativi
I due principali tipi di dissipatori metallici sono i buckling-restrained
brace (BRB) e gli added damping and stiffness (ADAS). Il dissipatore BRB,
raffigurato in Figura 2.3 (Christopoulos e Filiatrault, 2006), costituito da
profili di acciaio (solitamente con una bassa tensione di snervamento), di
sezione trasversale cruciforme, circondati da un tubo d'acciaio rigido. La
regione tra il tubo e il profilo riempita con un materiale simile al cemento ed
uno speciale rivestimento viene applicato al profilo per evitare che sincolli al
calcestruzzo in modo tale che il profilo pu scorrere rispetto al tubo riempito di
cemento.
Figura 2.3 Componenti dei dissipatori BRB (Buckling Restrained Brace)
Questultimo fornisce un confinamento che permette al profilo di essere
sottoposto a carichi di compressione evitando linstabilizzazione (cio, il
dispositivo pu snervarsi sia a tensione sia a compressione, essendo i carichi di
trazione e compressione portati interamente dal profilo dacciaio). Sotto i
carichi di compressione, il comportamento del dissipatore sostanzialmente
40
Sistemi di protezione sismica
identico al suo comportamento a trazione. Dal momento che linstabilit
impedita, una significativa dissipazione di energia pu verificarsi nel corso di
un ciclo disteresi. Ulteriori dettagli sul comportamento dei dissipatori BRB
sono forniti da Black et al. (2004).
In molti casi, i dissipatori BRB sono installati all'interno di una maglia
strutturale formando una controventatura a K. In questo caso se si applica un
carico laterale, un profilo in compressione e l'altro in trazione, annullando
quindi il carico verticale nel punto di intersezione tra i profili e la trave
sovrastante . A questo proposito, i BRB possono essere considerati migliori di
una convenzionale controventatura a K in cui previsto che l'elemento
compresso si instabilizzi elasticamente, lasciando sbilanciata una componente
verticale della forza potenzialmente grande nel membro teso, che , a sua volta,
applicato alla trave sovrastante.
Durante la risposta elastica iniziale, il BRB fornisce solo rigidezza. Non
appena il dissipatore si snerva, la rigidezza si riduce e la dissipazione di energia
avviene grazie alla risposta isteretica anelastica. Il comportamento isteretico di
un dissipatore BRB pu essere rappresentato da vari modelli matematici che
descrivono il comportamento dei metalli (Soong e Dargush, 1997). Un esempio
il modello di Bouc-Wen (Wen 1976), descritto da Black et al. (2004) e
confrontato con i dati di test sperimentali. Il modello definito da
(2.1)
dove il rapporto tra la rigidezza post e pre snervamento; K la
rigidezza prima dello snervamento; uy lo spostamento che corrisponde allo
snervamento; e Z(t) la variabile evolutiva definita da
(2.2)
dove , e sono parametri adimensionali che definiscono la forma del
ciclo disteresi.
Il comportamento dei dissipatori BRB abbastanza buono in termini di
capacit di dissipazione energetica, come indicato dalla Figura 2.4 dalla forma
dei cicli disteresi. Daltro canto, la dissipazione di energia il risultato del
comportamento inelastico del materiale e quindi il dissipatore BRB viene
danneggiato dopo un terremoto e pu accadere che ci sia bisogno di sostituirlo.
41
Sistemi di protezione sismica
Figura 2.4 Risposta isteretica di un BRB (Black et al. 2004)
Un secondo tipo di dissipatore metallico il dispositivo ADAS
(Whittaker et al 1991; Xia e Hanson 1992; Fierro e Perry 1993), costituito da
una serie di piastre di acciaio aventi il fondo collegato alla sommit di una
controventatura a K e la parte superiore attaccata al livello del piano sopra il
controvento (vedi Figura 2.5).
Figura 2.5 Dispositivo ADAS, con la sua condizione di deformazione
Il piano superiore si deforma lateralmente rispetto al controvento,
inducendo nelle piastre metalliche sollecitazioni taglianti. Le forze di taglio
inducono momenti flettenti lungo laltezza delle piastre, agenti attorno all'asse
debole della sezione trasversale piastra. La configurazione geometrica delle
piastre tale che i momenti flettenti producono una sollecitazione flessionale
uniforme sull'altezza delle piastre. In tal modo si verifica un'azione anelastica
42
Sistemi di protezione sismica
uniformemente su tutta l'altezza delle piastre. Ad esempio, nel caso in cui le
piastre sono fixed-pinned (fissate rigidamente su un lato e imbullonate
sullaltro), la forma geometrica triangolare. Nel caso in cui le lastre sono di
tipo fixed-fixed, la forma geometrica una forma a clessidra. Per garantire che
la deformazione relativa del dispositivo ADAS sia approssimativamente uguale
allo spostamento di piano in cui installato, la controventatura deve essere
molto rigida.
Il comportamento isteretico dei dissipatori ADAS simile a quello dei
BRB (vedi Figura 2.6) e pu essere rappresentato da vari modelli matematici
che descrivono il comportamento a snervamento sotto carico ciclico dei metalli
(ad esempio, vedere Equazioni (2.1) e (2.2)).
Figura 2.6 Relazione sperimentale forza-spostamento ADAS (Tsai et al., 1993)
Come per i dissipatori BRB, la dissipazione di energia degli ADAS il
risultato del comportamento inelastico del materiale e quindi le piastre
metalliche saranno danneggiate dopo un evento sismico e pu essere necessario
sostituirle.
43
Sistemi di protezione sismica
2.4.2 Dissipatori ad attrito
Principi base
I dissipatori ad attrito dissipano lenergia sismica attraverso la frizione
che si genera tra due corpi solidi che scorrono relativamente uno rispetto
allaltro. Se si considera il carico di scorrimento come lequivalente della forza
di snervamento, per vari aspetti il modello macroscopico dei dissipatori ad
attrito simile al modello dei dissipatori metallici (Christopoulos e Filiatrault,
2006).
Lattrito fra superfici solide stato studiato da illustri scienziati come
Leonardo da Vinci, Newton e Coulomb. La teoria di base della frizione secca
(con tale aggettivo si intende lassenza di lubrificanti fra le superfici a contatto)
tra due solidi si fonda su tre assunzioni, convalidate sperimentalmente sotto
specifiche condizioni:
-
La forza totale dattrito che pu essere sviluppata indipendente
dallarea della superficie di contatto apparente.
La forza totale dattrito che pu essere sviluppata proporzionale alla
forza totale normale, agente attraverso linterfaccia di scorrimento.
Per il caso di scorrimento con basse velocit relative, la forza totale
dattrito indipendente dalla velocit di scorrimento.
Pertanto durante lo scorrimento, la relazione tra la forza dattrito Fa che
agisce tangenzialmente allinterno del piano dinterfaccia nella direzione
opposta al moto, e la forza normale N pu essere espressa come:
(2.3)
dove il coefficiente dattrito. E necessario a questo punto
specificare la distinzione tra forza dattrito statico e forza dattrito cinetico
(dinamico). Come si pu osservare dalla Figura 2.7, la forza dattrito statico si
presenta immediatamente prima dellinizio o dellinversione del moto di
scorrimento ed pi alta della forza dinamica misurata a bassa velocit dopo
linizio del moto. Sebbene le forze dattrito sono semplici da misurare o da
calcolare tramite lEquazione (2.3), i fenomeni relativi al meccanismo di
44
Sistemi di protezione sismica
frizione sono molteplici (Christopoulos e Filiatrault, 2006). In particolare i
fattori principali che influenzano la reale superficie di contatto sono: la forma e
il contorno della superficie dei materiali a contatto tra loro; il modo in cui le
asperit di queste superfici si deformano quando applicata una pressione
normale; come aderiscono ed il ruolo dei rivestimenti.
Figura 2.7 Relazione tra forza di scorrimento e spostamento
Lattrito indotto da una pressione normale applicata a superficie in
contatto. Questo carico provoca una deformazione delle asperit e la
dipendenza della vera area di contatto sullinterfaccia di scorrimento dalla
pressione normale applicata. Il coefficiente dattrito e N nellEquazione (2.3)
non sono quindi indipendenti, ma strettamente correlati. La determinazione del
coefficiente dattrito dipendente, oltre che dalla pressione, anche dalla
velocit di scorrimento, dalla temperatura, dal tempo di carico e dalla
corrosione (Christopoulos e Filiatrault, 2006).
Esempi Applicativi
Vi sono molteplici dispositivi che sono stati proposti allo scopo di
migliorare la risposta sismica delle strutture che differiscono nella complessit
meccanica e nei materiali utilizzati per le superfici a contatto.
45
Sistemi di protezione sismica
Il pi semplice dispositivo ad attrito costituito dallintroduzione di
semplici connessioni bullonate con fori asolati (Slotted-Bolted Connections,
vedi Figura 2.8) alle estremit degli elementi di controvento convenzionali
(Christopoulos e Filiatrault, 2006). La connessione deve essere progettata per
scorrere prima che gli elementi della controventatura si snervino o si
instabilizzino.
Figura 2.8 Connessione bullonata con fori asolati (Slotted-Bolted Connections)
Come rappresentato in Figura 2.8, i bulloni sono soggetti a taglio con
fori asolati nella piastra di nodo e fori standard circolari nelle piastre di
collegamento che si estendono dallelemento di controvento. La lunghezza
dellasola deve essere sufficiente ad accogliere il massimo scorrimento
calcolato per il sisma di progetto.
Figura 2.9 Dispositivo ad attrito Sumitomo (da Aiken et al. 1993)
Un dispositivo pi sofisticato il dissipatore ad attrito prodotto dalla
Sumitomo Metal Industries Ltd. In Giappone, riportato in Figura 2.9. Esso
46
Sistemi di protezione sismica
dissipa energia tramite lattrito che si forma tra delle pastiglie di rame ed un
cilindro dacciaio per effetto della forza indotta da una molla interna
(Constantinou et al., 1998). Queste leghe di rame vengono ricoperte di grafite
per garantire un attrito secco, mantenendo in tal modo un coefficiente si attrito
consistente tra le due superfici. Come mostrato in Figura 2.10, la risposta
ciclica del Dispositivo Sumitomo molto regolare e ripetibile con cicli
disteresi rettangolari.
Figura 2.10 Cicli disteresi del dissipatore Sumitomo (da Aiken et al. 1993)
Un ulteriore dispositivo ad attrito il sistema Pall (Pall and Marsh,
1981) ideato per essere montato in strutture a telaio. Il sistema costituito da
un meccanismo contenente giunti che slittano in fori asolati introdotto
allintersezione di controventi a X (vedi Figura 2.11).
Figura 2.11 Installazione di un dissipatore Pall ad attrito in una controventatura
47
Sistemi di protezione sismica
Il dispositivo progettato per non slittare sotto i carichi di normale
servizio e per sismi moderati. Durante intensi terremoti, il dispositivo slitta ad
un determinato carico, prima che qualche elemento strutturale giunga a
snervamento. Lo slittamento cambia il periodo naturale della struttura e
permette di alterare il modo fondamentale di vibrare, evitando quindi il
fenomeno della risonanza per effetto della capacit di desintonizzazione della
struttura con il dispositivo ad attrito (Christopoulos e Filiatrault, 2006). In
Figura 2.12, si mostra la risposta di un Dispositivo Pall che si mantiene
costante per oltre 50 cicli; i cicli disteresi non sono perfettamente regolari ai
due angoli per una ragione attribuita alla differenza tra il diametro dei bulloni
ed i fori.
Figura 2.12 Risposta isteretica di un dissipatore ad attrito Pall
48
Sistemi di protezione sismica
2.5 Dissipatori viscosi e viscoelastici
Il controllo della vibrazioni con dissipatori viscosi o viscoelastici stata
utilizzata per decenni su aerei, strutture aerospaziali e in campo militare.
Nellingegneria civile, il primo utilizzo di dispositivi viscoelastici datato
1969 quando oltre 10000 di questi dissipatori furono installati in ognuna delle
torri gemelle del World Trade Center in New York, progettati per ridurre le
vibrazioni causate dal vento (Costantinou et al., 1998). Solo nelle ultime due
decadi dispositivi viscosi e viscoelastici sono stati utilizzati per applicazioni
antisismiche.
2.5.1 Dissipatori viscoelastici
I materiali viscoelastici utilizzati nelle applicazioni strutturali sono
tipicamente copolimeri che dissipano energia quando sono soggetti a
deformazione tagliante.
Figura 2.13 Tipico dispositivo Viscoelastico
Un tipico dissipatore viscoelastico (VE) mostrato in Figura 2.13, ed
composto da strati di materiale viscoelastico racchiuso da piatti metallici a loro
49
Sistemi di protezione sismica
volta attaccati ad un sistema di controvento a K o diagonale. La deformazione a
taglio e quindi la dissipazione di energia avviene quando la vibrazione
strutturale induce un movimento relativo tra i piatti metallici esterni e il piatto
centrale (Costantinou et al., 1998).
Come suggerito dal nome, i materiali viscoelastici non sono puramente
viscosi ma esibiscono anche una risposta elastica. Un modello che pu essere
usato per rappresentare questo comportamento il solido Kelvin, ovvero una
molla e uno smorzatore posti in parallelo (vedi Figura 2.14).
Figura 2.14 Modello del Solido Kelvin
GE e GC rappresentano rispettivamente il modulo elastico a taglio e la
costante di smorzamento viscoso a taglio appartenenti al materiale
viscoelastico. Assumendo che esso abbia uno spessore a taglio h e unarea a
taglio As, le sue rigidezze a taglio elastica e viscosa sono
(2.4)
con una relazione forza-spostamento
(2.5)
Se si assume che lelemento Kelvin sia soggetto ad una storia-temporale
armonica dello spostamento relativo dato da
(2.6)
dove X0 lampiezza dello spostamento tra gli estremi dellelemento e
la pulsazione, la forza assiale indotta nel dissipatore viscoelastico F(t) vale:
(2.7)
LEquazione (2.7) descrive unellisse inclinata come mostrato in Figura
2.15. La massima forza non avviene con il massimo spostamento anche se non
50
Sistemi di protezione sismica
pronunciato come si vedr nei dissipatori viscosi puri (Christopoulos e
Filiatrault, 2006).
Figura 2.15 Comportamento isteretico di un dissipatore viscoelastico
Si dimostra facilmente che lenergia dissipata per ogni ciclo vale:
(2.8)
dove si nota che la porzione di rigidezza elastica dellelemento Kelvin
non contribuisce alla dissipazione di energia. Lo smorzamento viscoso
equivalente
rappresentato dallelemento Kelvin, risulta
(2.9)
dove
la pulsazione del dispositivo e m la massa connessa ai suoi
estremi.
LEquazione (2.9) pu essere riscritta come:
(2.10)
in cui si introdotto il loss factor che d una misura della capacit
dissipativa del materiale viscoelastico. Nella teoria della viscoelasticit, GE
definito come shear storage modulus che una misura dellenergia
immagazzinata e recuperata ogni ciclo; GC
definito come shear loss
modulus, che una misura dellenergia dissipata ogni ciclo(Christopoulos e
Filiatrault, 2006).
51
Sistemi di protezione sismica
Diventa chiaro che GE e GC oppure GE e determinano la risposta
dinamica a taglio di un materiale viscoelastico, modellato come un solido
Kelvin, sotto uneccitazione armonica a spostamento controllato. Questi
moduli dipendono da numerosi parametri: i) la frequenza della forzante, ii) la
temperatura ambiente, iii) il livello di deformazione a taglio e iv) la variazione
della temperatura interna al materiale durante loperazione. Dalle indagini
sperimentali (Christopoulos e Filiatrault, 2006) risulta che:
-
Lenergia dissipata ogni ciclo diminuisce con lincremento della
temperatura ambiente;
Sebbene entrambi i moduli diminuiscono con lincremento della
temperatura, il loss factor rimane pressoch costante per ogni
temperatura;
Le propriet del dissipatore viscoelastico rimangono pressoch
indipendenti dal livello di deformazione a taglio se questa rimane sotto
al 20% per ogni temperatura e per ogni frequenza.
52
Sistemi di protezione sismica
2.5.2 Dissipatori viscosi
Tutti i dispositivi descritti fino a questo punto utilizzano lazione di
solidi per raggiungere determinate prestazioni strutturali durante eventi sismici.
Anche i fluidi per possono essere effettivamente impiegati per conseguire il
desiderato livello di controllo passivo. Negli anni recenti sono stati fatti
notevoli sforzi nello sviluppo di dissipatori fluido viscosi per applicazioni
strutturali,
primariamente
attraverso
la
conversione
della
tecnologia
dallindustria pesante e militare (Soong e Dargush, 1997).
Un semplice approccio progettuale costituito dal classico smorzatore,
in cui la dissipazione avviene tramite la conversione dellenergia in calore
dovuta ad un pistone che deforma una sostanza densa ad alta viscosit, come
un gel siliconico. In Figura 2.16.a) rappresentato un dispositivo di questo tipo
che ha trovato applicazione come componente di sistemi di isolamento sismico
(cylindrical pot fluid damper). Anche se questo dispositivo pu anche essere
impiegato allinterno della sovrastruttura, unalternativa forse pi convincente
prevede lo sviluppo di dissipatori a pareti viscose (viscous damping wall)
illustrati in Figura 2.16.b). Nella progettazione, il pistone un semplice piatto
dacciaio costretto a muoversi nel suo piano allinterno di un contenitore
metallico rettangolare riempito di fluido viscoso. Una tipica installazione
prevista nella campata del telaio, in cui il pistone attaccato al piano superiore,
mentre il contenitore fissato al piano inferiore. Il moto relativo dinterpiano
deforma il fluido provocando in tal modo dissipazione di energia (Soong e
Dargush, 1997).
Entrambi i dispositivi appena citati adempiono gli obiettivi attraverso la
deformazione del fluido viscoso che risiede nel contenitore. Per massimizzare
la dissipazione di energia di questi dispositivi necessario impiegare materiali
con grande viscosit. Tipicamente, questo porta alla selezione di materiali che
esibiscono un comportamento dipendente sia dalla frequenza sia dalla
temperatura. Esiste comunque unaltra classe di dissipatori fluido viscosi che fa
affidamento sul flusso di fluidi allinterno di un contenitore ermetico. Il pistone
in questo caso non agisce semplicemente per deformare il fluido ma piuttosto
53
Sistemi di protezione sismica
per forzarlo a passare attraverso piccoli fori. Come risultato, si ottengono alti
livelli di dissipazione di energia ma un corrispondente alto livello di
sofisticazione richiesto per un adeguato progetto interno del dissipatore.
Figura 2.16 Tipologie di dissipatori viscosi
Un tipico orificed fluid damper rappresentato in Figura 2.16.c).
Questo dispositivo cilindrico contiene un olio siliconico comprimibile che
forzato a fluire attraverso lazione di un pistone di acciaio inossidabile con la
testa di bronzo. La forza generata dal dissipatore dovuta alla differenza di
54
Sistemi di protezione sismica
pressione tra i due lati della testa del pistone. A causa della comprimibilit del
fluido, la riduzione di volume dovuta al flusso sviluppa una forza elastica di
ripristino, generalmente impedita dall'utilizzo di un accumulatore: i test
indicano una frequenza, definita di cut off, di 4 Hz (a seconda del disegno
dell'accumulatore, Filiatrault, 2003), sotto la quale non viene prodotta
rigidezza. Ci significa che i modi superiori, con frequenze superiori alla soglia
di cut-off, potrebbero essere influenzati dal componente elastica, mentre per i
modi fondamentali si ha un comportamento tipicamente viscoso che
massimizza la dissipazione di energia. La natura puramente viscosa evidente
in Figura 2.17.
Figura 2.17 Cicli di isteresi Forza-Spostamento di un dissipatore fluido
Nonostante i dissipatori fluido viscosi differiscano notevolmente tra di
loro, i modelli matematici che descrivono il loro comportamento sono simili.
Makris e Constantinou (1991) hanno utilizzato il seguente modello forzaspostamento di Maxwell a derivate frazionali per modellare la risposta
complessiva:
(2.11)
indicando con F la forza applicata al pistone e con x lo spostamento
risultante del pistone. I parametri C0, e v rappresentano il coefficiente di
smorzamento a frequenza zero, il tempo di rilassamento e lordine di
derivazione frazionale rispettivamente. Dalle analisi sperimentali (Makris e
55
Sistemi di protezione sismica
Costantinou, 1991) stato notato che la dipendenza dalla frequenza molto
meno rilevante ed un classico modello di Maxwell adeguato nel range di
frequenze dinteresse. In tal modo lEquazione (2.11) si riduce alla seguente:
(2.12)
dove C0 e sono il coefficiente di smorzamento a frequenza nulla e il
tempo di rilassamento. Inoltre stato evidenziato che, sotto una determinata
frequenza (approssimativamente di 4Hz), lEquazione (2.12) si pu ancora
semplificare trascurando il secondo termine del primo membro poich
insignificante (Christopoulos e Filiatrault, 2006).
Si ottiene dunque
lequazione che governa il comportamento di un dissipatore lineare puramente
viscoso
(2.13)
semplificando le analisi strutturali.
2.5.2.1 Dissipatore viscoso Lineare
Se si considera un elemento puramente viscoso soggetto ad una storia
dello spostamento assiale relativo che varia nel tempo dato da:
(2.14)
dove X0 lampiezza dello spostamento tra gli estremi dellelemento e
la pulsazione della forzante. La forza assiale F(t) indotta nellelemento
linearmente proporzionale alla velocit relativa tra i due estremi:
(2.15)
dove CL la costante di smorzamento viscoso lineare.
Sostituendo lEquazione (2.14) nellEquazione (2.15) si ottiene:
(2.16)
Dalla trigonometria di base:
(2.17)
Sostituendo lEquazione (2.17) nellEquazione (2.16) si ottiene la
relazione forza-spostamento per un dissipatore viscoso lineare:
56
Sistemi di protezione sismica
(2.18)
ovvero:
(2.19)
I cicli disteresi descritti dallEquazione (2.19) sono delle ellissi come
illustrato in Figura 2.18 (Christopoulos e Filiatrault, 2006). Lampiezza della
massima forza indotta nel dissipatore viscoso lineare linearmente
proporzionale alla frequenza di eccitazione, allampiezza dello spostamento e
alla costante di smorzamento.
Figura 2.18 Comportamento isteretico di un dissipatore viscoso lineare
Inoltre la massima forza nel dissipatore avviene a spostamento nullo.
Allo spostamento massimo invece, la forza nel dissipatore viscoso lineare
nulla. In altre parole, le forze generate da questo tipo di dissipatore in una
struttura sono fuori fase con le forze generate dal sistema strutturale
(Christopoulos e Filiatrault, 2006). Questo un vantaggio significativo che
hanno i sistemi di dissipazione viscosi rispetto ai sistemi di dissipazione
isteretici che generano la massima forza quando il sistema strutturale al suo
massimo spostamento (vedi Paragrafo 2.3).
Lenergia dissipata dal dissipatore in ogni ciclo Evd larea al di sotto la
relazione forza spostamento:
57
Sistemi di protezione sismica
(2.20)
che vale:
(2.21)
Lenergia dissipata ogni ciclo linearmente proporzionale alla costante
di smorzamento lineare e alla frequenza di eccitazione, ed proporzionale al
quadrato dellampiezza di spostamento massimo.
2.5.2.2 Dissipatore viscoso Non Lineare
I dissipatori di tipo fluido possono essere progettati per comportarsi
come un elemento viscoso non lineare attraverso la scelta dellolio siliconico e
la calibrazione degli orifizi. Il maggior vantaggio di un dissipatore viscoso non
lineare che, in caso di velocit di picco, la forza nel dispositivo controllata
per evitare di sovraccaricare il dissipatore o il sistema di controvento al quale
connesso (Christopoulos e Filiatrault, 2006). In altri termini, modificando il
sistema di passaggio del fluido siliconico, si ottiene una relazione forzaspostamento in cui la velocit incide meno sul valore della forza.
La forza assiale sviluppata da un dissipatore viscoso non lineare F(t)
espressa da:
(2.22)
dove CNL la costante di smorzamento non lineare e
coefficiente della velocit che varia da 0,2 a 1. Quando
il
, il dispositivo
agisce come un dissipatore viscoso lineare e lEquazione (2.22) equivalente
allEquazione (2.15). Quando
invece, il dispositivo agisce come
ununit di trasmissione dello shock sviluppando grandi forze per velocit
elevate. Come illustrato in Figura 2.19, il vantaggio di utilizzare un dissipatore
viscoso non lineare con
velocit elevate.
58
la riduzione della forza nel dispositivo per
Sistemi di protezione sismica
Figura 2.19 Propriet Forza-Velocit di differenti dissipatori viscosi non lineari
Si considero ora un dissipatore viscoso non lineare soggetto ad una
time-history dello spostamento relativo x(t) tra i suoi estremi di tipo armonico
dato da:
(2.23)
Sostituendo lEquazione (2.23) nellEquazione (2.22) si ottiene:
(2.24)
Sostituendo lEquazione (2.17) nellEquazione (2.24) si ricava la
relazione forza-spostamento per un dissipatore viscoso non lineare:
(2.25)
Il ciclo disteresi descritto dallEquazione (2.25) illustrato in Figura
2.20 per differenti valori del coefficiente di velocit
. Sebbene la forza nel
dissipatore viscoso non lineare rimane fuori fase con le forze sviluppate nel
sistema strutturale, la risposta ciclica del dispositivo si avvicina alla relazione
rettangolare forza-spostamento di un dissipatore isteretico con il diminuire del
parametro
. Ci nonostante, lampiezza della massima forza indotta in un
dissipatore viscoso non lineare rimane linearmente proporzionale alla costante
di smorzamento non lineare e proporzionale alla potenza di
, della
frequenza pulsante e dellampiezza di spostamento (Christopoulos e Filiatrault,
2006).
59
Sistemi di protezione sismica
Figura 2.20 Comportamento isteretico di un dissipatore viscoso non lineare
Lenergia dissipata da un dissipatore non lineare in ogni ciclo Evd
larea al di sotto del grafico forza-spostamento:
(2.26)
Valutando lintegrale della parte destra dellEquazione (2.26), si ricava:
(2.27)
che pu essere scritta anche come:
(2.28)
dove la funzione gamma.
60
Sistemi di protezione sismica
2.6 Sistemi auto-centranti (Self-centering systems)
La Figura 2.21.a) mostra la risposta forza-spostamento ideale di un
sistema elastico lineare e di un sistema rappresentante una struttura duttile di
egual rigidezza e massa. La massima forza sismica indotta nella struttura
duttile significativamente pi bassa di quella del sistema elastico lineare
(Christopoulos e Filiatrault, 2006). Il massimo spostamento del sistema duttile
pu essere pi piccolo, simile o pi grande di quello del sistema elastico, a
seconda delle caratteristiche del movimento del suolo, del periodo naturale e
dalla forza del sistema duttile.
Le progettazioni che mirano ad una risposta inelastica della struttura
sono molto allettanti, particolarmente dal punto di vista del costo iniziale, ma
hanno due gravi inconvenienti. Primo, gli elementi del sistema principale
resistente (sia gli elementi dissipatori sia i membri strutturali) sono sacrificati
in terremoti moderatamente forti necessitando riparazioni o sono danneggiati
oltre le possibili riparazioni in terremoti forti. Secondo, gli approcci di
progettazione correnti sono basati sulla premessa che necessaria grande
capacit di dissipazione energetica per mitigare gli effetti di un sisma
(Christopoulos e Filiatrault, 2006). Questa premessa ha portato molto spesso
allidea che un buon sistema strutturale dovrebbe essere caratterizzato da
grassi cicli isteretici. Sebbene una grande parte dellenergia sismica in
ingresso viene dissipata per isteresi, significative deformazioni residue
rimangono nella costruzione dopo un evento sismico, come illustrato in Figura
2.21.a). Eccessive deformazioni residue possono significare la perdita totale
della struttura se gli effetti del secondo ordine (P-) indotti dai carichi verticali
portano il sistema vicino al collasso.
Le correnti filosofie di progettazione sismica attuali enfatizzano
limportanza di progettare sistemi strutturali duttili per sopportare cicli
inelastici durante eventi sismici, riconoscendo gli svantaggi economici nel
progettare edifici che resistono ai terremoti elasticamente. La performance di
una struttura tipicamente valutata sulla base della massima deformazione e/o
61
Sistemi di protezione sismica
sullenergia inelastica assorbita durante il sisma. Molte strutture progettate con
gli attuali codici sostengono deformazioni residue per eventi sismici di base
(DBE design-basis earthquake) anche se si comportano esattamente come
aspettato. Le deformazioni residue possono consistere in una parziale o totale
perdita della costruzione se sopraggiunge la minaccia di un collasso statico, se
la struttura appare non sicura agli occupanti o se la risposta del sistema ad un
successivo terremoto o a scosse di assestamento alterata dalla nuova
posizione di riposo della struttura. Per di pi, le deformazioni residue possono
portare ad un incremento dei costi di riparazione o di rimpiazzo di elementi
non strutturali nel momento in cui la nuova condizione di riposo della struttura
alterata.
Figura 2.21 Comportamento isteretico idealizzato: a) sistema isteretico;
b) sistema auto-centrante
Recentemente sono stati proposti in sistemi strutturali auto-centranti
(self-centering systems) che possiedono caratteristiche di minimizzazione delle
deformazioni residue e che sono economicamente vie alternative ai correnti
sistemi resistenti alle forze laterali (Christopoulos e Filiatrault, 2006).
La Figura 2.21.b) mostra la caratteristica risposta sismica flag-shaped (a
forma di bandiera) di questi sistemi auto-centranti. La quantit di energia
dissipata minore di quella del sistema isteretico di Figura 2.21.a), ma pi
importante, il sistema ritorna allorigine (forza nulla, spostamento nullo) ad
ogni ciclo e alla fine dellevento sismico.
62
Sistemi di protezione sismica
interessante discutere in merito alle differenti risposte dinamiche non
lineari tra listeresi auto-centranti e le isteresi piene tradizionali. Da un punto di
vista qualitativo, si possono osservare le seguenti differenze principali:
-
Listeresi a forma di bandiera dissipa meno energia, al pi la met, ad
ogni ciclo rispetto allisteresi elasto-plastica.
Listeresi a forma di bandiera ha pi frequenti cambiamenti di rigidezza
allinterno di un ciclo non lineare rispetto allisteresi elasto-plastica.
Listeresi a forma di bandiera ritorna allorigine con forza e
spostamento nulli mentre lo snervamento del sistema elasto-plastico
pu portare ad un lento avanzamento della risposta in una direzione.
Diversi tipi di dispositivi sono stati sviluppati, tra questi si trovano:
Shape Memory Alloys (SMA)
Energy Dissipation Restrain (EDR)
Friction Spring Seismic
Post-Tensioned Energy Dissipating (PTED) steel connections
I dissipatori (SMA), leghe a memoria di forma, sono costituite da due o
tre differenti metalli. In base al processo di produzione e alla temperatura della
lega, sono possibili diverse disposizioni molecolari della struttura cristallina.
Le trasformazioni avvengono quando la temperatura aumenta nel processo di
produzione della lega. Per temperature di lega intermedie si ottiene la
coesistenza di due fasi, martensitica ed austenitica. Sottoponendo queste leghe
ad un incremento di sollecitazione si provoca la trasformazione di una fase
nellaltra. Viceversa, al momento della rimozione della causa sollecitante, si
ottiene la trasformazione inversa e si ritorna allo stato originale. Generalmente
si parte da un comportamento austenitico (elastico lineare) fino a un certo
valore di tensione sopra il quale avviene la trasformazione da austenite a
martensite e pi incrementa la deformazione pi martensite si genera. In questa
fase la curva tensione-deformazione segue un andamento simile al tratto di
snervamento dellacciaio. Nel momento in cui la struttura diventa
completamente martensitica per ulteriori incrementi di deformazione riprende
63
Sistemi di protezione sismica
un comportamento elastico lineare. Allo scarico avviene la trasformazione
inversa che incomincia ad un livello di tensione pi basso rispetto a quello di
carico (Christopoulos e Filiatrault, 2006).
Figura 2.22 Comportamento superelastico di un SMA
Questo processo, chiamato comportamento superelastico, genera un
effetto isteretico con deformazioni residue vicine allo zero, come mostrato in
Figura 2.22. I dispositivi realizzati con queste leghe possiedono quindi molti
vantaggi applicabili alle strutture: alta rigidezza per basse deformazioni, pi
flessibilit per alte deformazioni, assenza di deformazioni residue e buona
dissipazione di energia. Lunico difetto risiede nella sensibilit delle leghe alla
fatica (Christopoulos e Filiatrault, 2006). Infatti, dopo un limitato numero di
cicli, il comportamento dei dissipatori si trasforma nel classico comportamento
plastico con formazione di deformazioni residue.
Un pi semplice e meno costoso dispositivo meccanico che esibisce una
risposta isteretica a forma di bandiera lEDR, un dissipatore prodotto dalla
Fluor Daniel, Inc mostrato in Figura 2.23. Questo sistema nacque come
elemento di vincolo per supportare le condotte delle centrali nucleari.
caratterizzato da una molla interna alle cui estremit sono posizionati cunei
dacciaio e bronzo. La compressione agente nella molla si traduce in uno
sforzo normale trasmesso dai cunei alla superficie interna del cilindro che
funge da contenitore. Nasce cos una forza dattrito corrispondente allazione
che in grado di trasmettere il dispositivo. A seconda del livello di pretensione
64
Sistemi di protezione sismica
che si assegna alla molla e alla distanza cui vengono posizionati i cunei rispetto
ai fermi interni, si possono ottenere diversi comportamenti ciclici.
Figura 2.23 Esempio di un EDR (Energy Dissipation Restraint)
Il dissipatore (Friction Spring Seismic Damper) usa una molla ad anello
per dissipare lenergia sismica in ingresso. Una sezione di un tipico
assemblaggio (Figura 2.24) consiste di anelli esterni e interni con superfici
accoppiate a forma conica. Se la molla caricata a compressione, lo
spostamento assiale accompagnato dallo scorrimento degli anelli sulle
superfici coniche di frizione. Gli anelli esterni sono soggetti a tensione mentre
quelli interni a compressione. Il dispositivo progettato per assicurare che le
stesse molle di frizione siano sempre compresse assialmente sia che il
dissipatore sia teso o compresso generando un diagramma disteresi
simmetrico a forma di bandiera che stabile e ripetibile (Christopoulos e
Filiatrault, 2006).
Recentemente, sono stati proposti sistemi auto-centranti per telai
metallici (Christopoulos et al., 2002), le (PTED) connessioni post-tensionate
che dissipano energia, costituite da barre dacciaio post-tensionate ad alta
resistenza progettate per rimanere elastiche e da barre confinate che dissipano
energia progettate per snervarsi sia a compressione sia a tensione. In Figura
2.24 illustrato limpiego di una connessione dacciaio PTED su un telaio di
acciaio, insieme alla configurazione deformata.
65
Sistemi di protezione sismica
Figura 2.24 Connessioni PTED per telai metallici (Christopoulos et al. 2002)
66
Sistemi di protezione sismica
2.7 Tuned Mass Damper (Dissipatori a massa accordata)
I Tuned Mass Dampers (TMD, dissipatori a massa accordata) o
assorbitori
di
vibrazione
sono
dei
sistemi
massa-molla-smorzatore
relativamente piccoli che sono calibrati per essere in risonanza con un
particolare modo di vibrare della struttura sulla quale sono installati. Questi
sistemi, solitamente installati sui tetti degli edifici, si sono dimostrati efficaci
nel ridurre le vibrazioni indotte dal vento in edifici alti e le vibrazioni di piano
indotte dalle attivit degli occupanti (Christopoulos e Filiatrault, 2006). Pi
recentemente, sono stati considerati per la protezione sismica degli edifici.
La loro costruzione semplice in quanto nella pi semplice forma, un
TMD richiede solo lassemblaggio di una massa, una molla, e un dissipatore
viscoso in un determinato punto della struttura, senza bisogno di una sorgente
di alimentazione esterna o hardware sofisticato.
Questi sistemi hanno comunque svantaggi (Christopoulos e Filiatrault,
2006).
Primo,
richiedono
una
massa
relativamente
grande
sebbene
rappresentino solo una piccola frazione della massa totale della struttura, e,
quindi, un ampio spazio per la loro installazione. Secondo, dal momento che
sono in risonanza con le loro strutture di supporto, sono sottoposti solitamente
a grandi spostamenti rispetto ai punti della struttura ai quali sono collegati. Ne
risulta che un ampio gioco richiesto per accogliere questi spostamenti. In
ultimo, devono essere montati su una superficie liscia per minimizzare lattrito
e facilitare il loro libero movimento.
67
Sistemi di protezione sismica
Figura 2.25 Struttura principale e TMD
Come mostrato in Figura 2.25, si consideri un sistema SDOF (ad un
grado di libert), con massa M e rigidezza elastica K, non smorzato soggetto ad
una forza dinamica esterna sinusoidale P(t) di ampiezza P0 e pulsazione
:
(2.29)
La TMD consiste di un sistema vibrante relativamente piccolo, di
rigidezza k e massa m, attaccato alla massa principale M, come illustrato in
Figura 2.25. Gli spostamenti relativi del sistema principale e della TMD sono
indicati rispettivamente con x1(t) e x2(t). Applicando la seconda legge di
Newton ad ogni massa si giunge a due equazioni del moto per un sistema a due
gradi di libert:
(2.30)
Dal momento che il sistema non smorzato, la risposta alla vibrazione
forzata prende una semplice forma:
(2.31)
dove a1 e a2 sono costanti che rappresentano lampiezza della
vibrazione rispettivamente della massa principale e secondaria. Sostituendo
lEquazione (2.31) nellEquazione (2.30) si ottiene:
(2.32)
Siccome lEquazione (2.32) deve essere soddisfatta per ogni valore di t:
(2.33)
Per semplificazione si introducono le seguenti variabili:
(2.34)
68
Sistemi di protezione sismica
Sostituendo le Equazioni (2.34) nelle Equazioni (2.33), dividendo per K
e risolvendo per le ampiezze a1 e a2 si ottengono:
(2.35)
Dalla prima di queste espressioni, risulta chiaro che quando la
frequenza naturale della TMD attaccata
alla frequenza
scelta per essere uguale
della forzante, la massa principale M non vibra (
).
Esaminando ora la seconda uguaglianza delle Equazioni (2.35) quando
. Il primo termine del denominatore dunque zero, e questa equazione
si riduce a:
(2.36)
Con la massa principale ancora ferma e la TMD in movimento che varia
con
, la forza sulla TMD varia con
, risultando istante
per istante uguale e contraria alla forza esterna applicata alla massa M.
Ovviamente questo il caso limite di un sistema ad un grado di libert
non smorzato ma che tuttavia chiarisce il funzionamento dei Tuned-Mass
Damper. Analisi pi complesse possono essere svolte tenendo conto anche
degli smorzamenti propri dei due sistemi e di pi gradi di libert (vedere
Christopoulos e Filiatrault, 2006).
69
Potrebbero piacerti anche
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Isolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataDocumento137 pagineIsolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataStefano FolladorNessuna valutazione finora
- Criteri Di Base Della Progettazione SismicaDocumento58 pagineCriteri Di Base Della Progettazione SismicaGiuseppe GentileNessuna valutazione finora
- Sistemi Di Isolamento SismicoDocumento19 pagineSistemi Di Isolamento SismicoGenNessuna valutazione finora
- Climatizzazione di edifici con pompe di calore geotermiche. Analisi termodinamica ed economicaDa EverandClimatizzazione di edifici con pompe di calore geotermiche. Analisi termodinamica ed economicaValutazione: 4 su 5 stelle4/5 (1)
- Cspfea 223 Gerarchia Delle ResistenzeDocumento37 pagineCspfea 223 Gerarchia Delle ResistenzeSalvatore GambinoNessuna valutazione finora
- SismiCad Corso - SAIE2010 IsolatoriDocumento45 pagineSismiCad Corso - SAIE2010 IsolatoriraaafNessuna valutazione finora
- Esercitazione NTC Laboratorio Di Costruzioni 2 Prof - Mario de StefanoDocumento59 pagineEsercitazione NTC Laboratorio Di Costruzioni 2 Prof - Mario de Stefanoroberto_romano8870Nessuna valutazione finora
- Capacità Portante Tegolo in CAP - Rev01Documento20 pagineCapacità Portante Tegolo in CAP - Rev01Mattia BuonriposiNessuna valutazione finora
- Principi Di ModellazioneDocumento142 paginePrincipi Di ModellazioneAnna FrignaniNessuna valutazione finora
- 04 2018.06.04 Maurizio Orlando (Edifici Esistenti) PDFDocumento96 pagine04 2018.06.04 Maurizio Orlando (Edifici Esistenti) PDFAlket DhamiNessuna valutazione finora
- APPUNTI Meccanica Della Frattura 2019 - Prima ParteDocumento40 pagineAPPUNTI Meccanica Della Frattura 2019 - Prima ParteCRISTIAN MONTESANONessuna valutazione finora
- Teoremi Della Plasticità (Limite Inferiore e Superiore)Documento40 pagineTeoremi Della Plasticità (Limite Inferiore e Superiore)Giuseppe GentileNessuna valutazione finora
- Valutazione Dei Cedimenti (1998)Documento28 pagineValutazione Dei Cedimenti (1998)Steel_catNessuna valutazione finora
- Strutture Antisismiche in Acciaio PDFDocumento126 pagineStrutture Antisismiche in Acciaio PDFGiuseppe GentileNessuna valutazione finora
- Assobeton Progettazione Sismica Strutture PrefabbricateDocumento90 pagineAssobeton Progettazione Sismica Strutture Prefabbricatepulcino_mannaro100% (1)
- MANUALEDocumento26 pagineMANUALEGeorge StefNessuna valutazione finora
- Structural Modeling TreDocumento16 pagineStructural Modeling Trebosnia76Nessuna valutazione finora
- Relazione Di ProgettoDocumento57 pagineRelazione Di ProgettoSig RossiNessuna valutazione finora
- L'Analisi Statica Non Lineare (Push-Over) Delle Strutture in Cemento ArmatoDocumento10 pagineL'Analisi Statica Non Lineare (Push-Over) Delle Strutture in Cemento ArmatoginoNessuna valutazione finora
- Plasticità Concentrata-DiffusaDocumento125 paginePlasticità Concentrata-DiffusaGiorgio Pinzari100% (1)
- Relazione Di Calcolo Strutture SCALADocumento16 pagineRelazione Di Calcolo Strutture SCALAMaggi DamianoNessuna valutazione finora
- Capriata PDFDocumento10 pagineCapriata PDFvm.amicoNessuna valutazione finora
- Parte II - 8 Criteri Di Modellazione PDFDocumento29 pagineParte II - 8 Criteri Di Modellazione PDFMatteo OliveriNessuna valutazione finora
- Stabilità Delle Sezioni MetallicheDocumento6 pagineStabilità Delle Sezioni Metallichepaolop87Nessuna valutazione finora
- Analisi Agli Elementi Finiti in Geotecnica (Studio Terrain)Documento40 pagineAnalisi Agli Elementi Finiti in Geotecnica (Studio Terrain)Francesco BisoNessuna valutazione finora
- Tesi Roberta BelfioreDocumento167 pagineTesi Roberta Belfiorebosnia76Nessuna valutazione finora
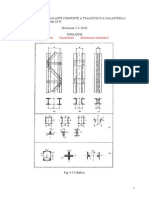
- Lezione16 Aste ComposteDocumento18 pagineLezione16 Aste ComposteAndreaMercuriNessuna valutazione finora
- Giangreco PDFDocumento298 pagineGiangreco PDFFrancesco MontagnoliNessuna valutazione finora
- Tipologia in AcciaioDocumento13 pagineTipologia in AcciaioEnriPatNessuna valutazione finora
- Relazione ScalaDocumento28 pagineRelazione ScalaMario RossiNessuna valutazione finora
- Analisi Dinamica Con SAp2000Documento183 pagineAnalisi Dinamica Con SAp2000carlosgrandeNessuna valutazione finora
- Elementi FinitiDocumento76 pagineElementi FinitiMa RcoNessuna valutazione finora
- La Meccanica Delle Strutture Prof. Bruno ZanDocumento90 pagineLa Meccanica Delle Strutture Prof. Bruno ZanAndrei LeuNessuna valutazione finora
- 6 Relazione SpecialisticaDocumento41 pagine6 Relazione Specialisticafausto giovannardiNessuna valutazione finora
- Indice 147 PDFDocumento53 pagineIndice 147 PDFMaurizio VellaNessuna valutazione finora
- Progettare Strutture in CADocumento186 pagineProgettare Strutture in CAproprioio2Nessuna valutazione finora
- Vulnerabilità SismicaDocumento31 pagineVulnerabilità SismicaPatrick DeckerNessuna valutazione finora
- Le Strutture Di Copertura Degli Edifici in Zona Sismica - Di FuscoDocumento7 pagineLe Strutture Di Copertura Degli Edifici in Zona Sismica - Di FuscoSteel_catNessuna valutazione finora
- Analisidibase Sap 2000 Tutorial by CsiDocumento93 pagineAnalisidibase Sap 2000 Tutorial by CsiAndreaAlberoNessuna valutazione finora
- Elio Giangreco Teoria E Tecnica Delle Costruzioni Stati Limite E Cemento Armato Parte III PDFDocumento114 pagineElio Giangreco Teoria E Tecnica Delle Costruzioni Stati Limite E Cemento Armato Parte III PDFAntonellaCorradoNessuna valutazione finora
- COLOMBO AcciaioDocumento72 pagineCOLOMBO Acciaio25Frency85Nessuna valutazione finora
- Corso Fondazioni DiretteDocumento73 pagineCorso Fondazioni DiretteAndrea Di Lorenzo100% (1)
- EdiLus Progettazione e Calcolo StrutturaDocumento238 pagineEdiLus Progettazione e Calcolo StrutturagiulyNessuna valutazione finora
- ESERCITAZIONE Con Confronto Matlab-SAP2000Documento130 pagineESERCITAZIONE Con Confronto Matlab-SAP2000Alessandro Cancelli100% (2)
- Appunti Di C.A.P 2 3Documento22 pagineAppunti Di C.A.P 2 3carman007Nessuna valutazione finora
- Bologna Cerchiature PDFDocumento102 pagineBologna Cerchiature PDFandytofting3Nessuna valutazione finora
- Appunti Su Solaio in CLSDocumento16 pagineAppunti Su Solaio in CLSIlenia Raperonzolo GabrieleNessuna valutazione finora
- Ponti Strallati1Documento75 paginePonti Strallati1pierluciolabella100% (1)
- AICAPDocumento46 pagineAICAPxandrea84xNessuna valutazione finora
- Tesi 4 - Risposta Sismica Del Sistema Terreno-StrutturaDocumento60 pagineTesi 4 - Risposta Sismica Del Sistema Terreno-StrutturaMatteo OliveriNessuna valutazione finora
- Indicazione Per Interventi-V4Documento41 pagineIndicazione Per Interventi-V4annac89Nessuna valutazione finora
- Criptovalute: trading ed investimenti per neofitiDa EverandCriptovalute: trading ed investimenti per neofitiNessuna valutazione finora
- Commentario delle nuove norme tecniche per le costruzioniDa EverandCommentario delle nuove norme tecniche per le costruzioniValutazione: 5 su 5 stelle5/5 (1)
- Introduzione Isolamento SismicoDocumento35 pagineIntroduzione Isolamento SismicoLETIZIONessuna valutazione finora
- M Avantaggiato Controsoffitti Radianti e Sismica Legislazione Normative e CaratteristicheDocumento7 pagineM Avantaggiato Controsoffitti Radianti e Sismica Legislazione Normative e CaratteristichegianniNessuna valutazione finora
- CatalogoDocumento68 pagineCatalogopercorsielmarNessuna valutazione finora
- SELI - Shelter - CompressedDocumento14 pagineSELI - Shelter - CompressedAscencio RubenNessuna valutazione finora
- Una Curiosa Razza. Le Jenny-Haniver Nei Quadri Di Bosch e Nei Cabinets e WurderkammernDocumento9 pagineUna Curiosa Razza. Le Jenny-Haniver Nei Quadri Di Bosch e Nei Cabinets e WurderkammernAlessandro E.M. PisaniNessuna valutazione finora
- L'organizzazione Del Corpo UmanoDocumento8 pagineL'organizzazione Del Corpo UmanoOlga ValloneNessuna valutazione finora
- Corrado Malanga - I FENOMENI BVMDocumento85 pagineCorrado Malanga - I FENOMENI BVMNannai02100% (2)
- Il GGG Testo e Esercizi PDFDocumento4 pagineIl GGG Testo e Esercizi PDFElisa LubianoNessuna valutazione finora
- Documenti Seduta LaureaDocumento6 pagineDocumenti Seduta LaureajenNessuna valutazione finora