Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
06 FLD
Caricato da
MarynaTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
06 FLD
Caricato da
MarynaCopyright:
Formati disponibili
83
CAPITOLO 6: EQUAZIONI DI BILANCIO PER UN VOLUME DI
CONTROLLO INFINITESIMO
6.1 Analisi differenziale del flusso.
Le equazioni della fluidodinamica scritte con lapproccio del Volume di
Controllo di dimensioni finite sono molto utili e pratiche, poich non richiedono
una conoscenza dettagliata di velocit, pressione, densit, ecc. entro il volume
di controllo, ma solo la conoscenza dei parametri globali che agiscono su di
esso, e quindi si prestano bene alla risoluzioni di casi reali ed esercizi.
Ci sono per molte situazioni nelle quali i dettagli del flusso sono importanti in
senso locale, cio valutati punto per punto nello spazio, e per le quali il metodo
precedente non fornir linformazione desiderata. In questo caso necessario
conoscere le equazioni di bilancio in forma differenziale. Per ricavarle
applicheremo il Teorema di Trasporto di Reynolds a un Volume di Controllo
Infinitesimo.
Finora abbiamo considerato il Teorema di Trasporto di Reynolds come
lequazione di base per ricavare le tre equazioni fondamentali in forma
integrale: Conservazione della Massa, Conservazione della Quantit di Moto e
Conservazione dellEnergia. Partendo dalle leggi di conservazione in forma
integrale, richiamate nel seguito, verranno quindi ricavate le analoghe
equazioni di bilancio per un volume di controllo infinitesimo.
6.2 Lequazione di Continuit in forma differenziale
Si considerata nel precedente capitolo lequazione di Continuit in forma
integrale, cio applicata ad un CV finito e fisso nello spazio
d = 0
(6.1)
Si suddivida la superficie del volume di controllo in due parti, corrispondenti
rispettivamente alle portate in ingresso ed in uscita dal volume stesso
84
= 0
(6.2)
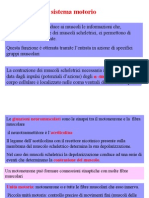
Si applichi ora la (6.2) ad un volume di controllo infinitesimo ( z y x d d d d = ),
come quello mostrato in Fig. 6.1, e si analizzi come si modificano i vari termini.
Fig.6.1: Volume di controllo infinitesimo per la determinazione della equazione di
conservazione della massa in forma differenziale
Per il primo termine, ricordando il significato fisico di integrale, si ha:
z y x
t t
CV
d d d d
Il secondo e il terzo termine rappresentano il flusso di massa attraverso le facce
del cubetto elementare. Considerando inizialmente le facce normali alla
direzione x (vedi figura 6.1), per esse il prodotto scalare dato da
( ) u n V =
dove il segno positivo si ha quando i versi del vettore velocit e della normale
alla superficie sono concordi. Inoltre, mediante sviluppo in serie di Taylor si
pu esprimere il flusso attraverso le facce del volume in funzione di quello
valutato nel punto centrale
z y x
x
u) (
= z y
2
x
x
u) (
- u - z y
2
x
x
u) (
+ u d d d d d
d
d d
d
|
.
|
\
|
|
.
|
\
|
Il flusso di massa nelle altre direzioni coordinate , in maniera analoga:
x
z
y
x
z
y
dy
x
x
u
u d
2
1 ) (
x
x
u
u d
2
1 ) (
P
x
u
P
x+dx
P
x-dx
dx
dy
x
x
u
u d
2
1 ) (
x
x
u
u d
2
1 ) (
P
x
u
P
x+dx
P
x-dx
dx
85
direzione y z y x
y
v) (
d d d
direzione z z y x
z
w) (
d d d
Dopo aver diviso per z y x d d d d = , lequazione di continuit in coordinate
Cartesiane ortogonali (6.2) diventa pertanto
0 =
z
w) (
+
y
v) (
+
x
u) (
t
|
|
.
|
\
|
(6.3)
o in forma vettoriale
0 = V +
t
(6.4)
o ancora in forma tensoriale Cartesiana (
i i
x v V =
, dove i=1, 2, 3)
0
) (
=
i
i
x
v
t
(6.5)
86
6.3 Lequazione di conservazione della Quantit di Moto in forma
differenziale
Come nel caso precedente si consideri lequazione di conservazione della
Quantit di Moto scritta per un volume finito
( ) ( )
= + +
CV
out CS in CS CV
F A n V V A n V V V
t
d d d (6.6)
Nella (6.6) il termine corrispondente al flusso netto di Quantit di Moto stato
suddiviso nei due contributi relativi a flusso rispettivamente entrante o uscente.
Si consideri ora lo stesso volume di controllo infinitesimo (figura 6.2) e si
proceda ad applicare ad esso lequazione appena scritta.
Fig.6.2: Volume infinitesimo e flussi di QM attraverso le superfici normali allasse x
Primo membro della (6.6)
Per quanto riguarda il primo termine a primo membro (derivata Euleriana della
quantit di moto associata al Volume di Controllo), esso si riduce al contributo
di variazione di quantit di moto del volumetto considerato
( )
z y x
t
V
V
t
cv
d d d d
Il secondo e terzo termine a primo membro rappresentano i flussi di quantit di
moto, rispettivamente in ingresso e uscita alla superficie del CV. A determinare
il segno di questi termini ovviamente il prodotto scalare. Si esprimano ora tali
x
z
y
x
z
y
dy
x
x
u V
u V d
2
1 ) (
x
x
u V
u V d
2
1 ) (
P
x
u V
P
x+dx
P
x-dx
dx
dy
x
x
u V
u V d
2
1 ) (
x
x
u V
u V d
2
1 ) (
P
x
u V
P
x+dx
P
x-dx
dx
87
contributi, valutati sulle facce, in funzione dei valori del flusso di Quantit di
Moto nel centro del volume infinitesimo. Per fare ci si consideri inizialmente il
contributo sulle facce normali alla direzione x
( ) ( ) ( ) ( ) z y u V z y u V A n V V A n V V
out in
x
out CS in CS
d d d d d d
+ =
(
(
+
Procedendo, come per lequazione di continuit, mediante sviluppo in serie di
Taylor si ottiene
( ) ( )
( ) ( )
z y
2
x
x
u V
+ u V z y
2
x
x
u V
- u V - z y u V z y u V
out in
d d
d
d d
d
d d d d
|
|
.
|
\
|
+
|
|
.
|
\
|
= +
Il contributo nella direzione , pertanto
ddd
Il contributo dei flussi di QM attraverso la superficie, nelle tre direzioni
coordinate diventa
( ) ( ) ( )
z y x
z
w V
y
v V
x
u V
d d d
(
Secondo membro della (6.6)
Si esamini ora il contributo delle forze a secondo membro della (6.6). In
generale, il primo termine a secondo membro della equazione integrale della
QM si riduce alla sommatoria delle forze infinitesime agenti sul volumetto
considerato
CV CV
F F
d
Si pu pertanto scrivere una prima forma differenziale della equazione di
conservazione della Quantit di Moto
( ) ( ) ( ) ( )
=
(
CV
F z y x
z
w V
y
v V
x
u V
t
V
d d d d (6.7a)
(DA RIVEDERE)
88
Ricordando il significato delloperatore divergenza, lequazione della Quantit
di Moto si scrive anche
= d
(6.7b)
Nota
Si osservi che il termine
(prodotto senza esito di un vettore per se stesso),
rappresenta un Tensore, entit che verr meglio precisata nel seguito. Inoltre, il termine
, prodotto del vettore nabla per il tensore suddetto, ha come risultato un
vettore. Tutti i termini della (6.7b) sono pertanto dei vettori.
Si scriva ora unaltra forma dellequazione della Quantit di Moto, nella quale
compaia una derivata Lagrangiana. Il primo termine a primo membro delle
(6.7b) si pu semplificare se si tiene presente che
( )
t
V
t
V
V
t
;
( )
x
u
V
x
V
u V u
x
e analoghe per le direzioni y e z;
Usando le precedenti la (6.7a) diventa
( ) ( ) ( )
=
(
+
(
CV
F
z
w
y
v
x
u
t
V
x
V
w
y
V
v
x
V
u
t
V
d d d
Ovvero
( ) ( )
=
(
+
(
CV
F V
t
V V V
t
V
d d d
Se si considera lequazione di Continuit
( ) 0 = + V
t
e si ricorda la relazione tra derivata Langrangiana e derivata Euleriana
[Capitolo 1], si ottiene una forma particolarmente importante della equazione di
conservazione della QM
89
d
d
d
= d
(6.8)
Che si ricollega immediatamente alla Legge di Newton scritta per un sistema
costituito da una particella fluida.
Forze agenti sul volume di controllo infinitesimo
Si tratta ora di definire meglio il termine che corrisponde alle forze agenti sul
volumetto infinitesimo. In generale le forze sono costituite da forze di massa e
da forze agenti sulle superfici del volume infinitesimo.
up s grav CV
F F F
d d d + =
E la (6.8) diventa
d
d
d
= d
+ d
(6.9)
Per quanto riguarda le prime, si possono per semplicit ricondurre alle forze
gravitazionali, che in un sistema di riferimento Cartesiano con lasse z verticale
e rivolto verso lalto si scrivono
k g g m F
grav
= = d d d
Invece, per esprimere le forze agenti sulle superfici del volumetto,
up s
F
d ,
occorre definire e studiare il cosiddetto stato di sforzo nel fluido in moto, che
verr esaminato brevemente nel prossimo capitolo.
Stato di Sforzo per un fluido in moto
Due aspetti importanti definiscono per lo stato di sforzo nei fluidi unanalogia
con quello dei solidi:
la conoscenza dello stato di sforzo in un punto rende possibile
determinare le forze agenti su una generica superficie passante nel
punto;
90
le sollecitazioni agenti su una generica superficie si compongono di
sforzi normali e tangenziali;
In contrasto con quanto avviene nei solidi:
le sollecitazioni tangenziali nascono solo se il fluido in moto.
Occorre ricordare che lo stato di sforzo nellintorno di un punto di un corpo
rigido non definibile completamente dalle semplici tre componenti di un
vettore di sforzo. Ci dovuto al fatto che ogni particolare vettore di sforzo
dipende dallorientamento del piano che passa per il punto considerato. Si pu
per dimostrare che gli sforzi normali e di taglio agenti su un qualsiasi piano
passante per un punto possono essere espressi in funzione degli sforzi agenti su
tre piani cosiddetti principali o su tre piani ortogonali che passano per il punto.
Figura 6.3: Volume infinitesimo, sollecitazioni agenti sulle tre facce visibili
Nella figura 6.3 sono riportate le sollecitazioni agenti sulle tre facce visibili del
volume infinitesimo considerato. Si osservi come sulle facce che presentano
normale concorde con lasse coordinato (ad esempio le facce normali allasse x e
allasse z), le direzioni convenzionalmente positive delle tensioni sono concordi
con gli assi coordinati. Viceversa, sulle facce che hanno normale opposta al
rispettivo asse coordinato, anche i versi positivi delle sollecitazioni sono
discordi con quelli degli assi. Mentre per le sollecitazioni normali non c
ambiguit nella simbologia, i simboli da assegnare alle sollecitazioni tangenziali
x
z
y
x
z
y
x
xy
zy
xz
zx
xz
yx
x
xy
zy
xz
zx
xz
yx
91
sulle facce dipendono per il primo pedice dalla normale alla superficie sulla
quale agiscono, per il secondo dalla loro direzione coordinata. Ad esempio,
la sollecitazione tangenziale agente su una superficie normale allasse x, ed
diretta secondo y.
Come detto precedentemente, per conoscere lo stato di sforzo in un punto,
ovvero le sollecitazioni agenti su una superficie con orientazione qualsiasi
passante per il punto, necessario conoscere i vettori di sforzo su tre direzioni
coordinate, per un totale di nove componenti, che definiscono il cosiddetto
tensore degli sforzi. Esso costituisce unentit di ordine superiore al vettore, ed
normalmente rappresentata con la matrice delle sue nove componenti.
(
(
(
=
zz yz xz
zy yy xy
zx yx xx
ij ij
(6.10)
Si pu dimostrare che la matrice (6.10) simmetrica e che le componenti
indipendenti del tensore degli sforzi sono solo sei.
Nel caso di fluido in quiete (idrostatica), gli sforzi sulle facce si riducono alle
sole componenti normali dovute alla pressione idrostatica, normalmente
considerate positive se agenti in verso opposto alla normale uscente dalla
superficie ( p
xx
= ):
(
(
(
=
p
p
p
statico
0 0
0 0
0 0
Per tener conto sia della situazione di fluido in quiete, sia di fluidi in moto, il
tensore dinamico (6.10) si riscrive facendo comparire la pressione idrostatica e
un termine,
(), che si annulla quando il fluido fermo o ideale,
ed in generale quando sono assenti le tensioni tangenziali, dovute alla viscosit
e ai gradienti di velocit. Pertanto la (6.10) si scrive
+ =
(
(
(
+
(
(
(
=
(
(
(
+
+
+
= I p p
p
p
p
zz yz xz
zy yy xy
zx yx xx
zz yz xz
zy yy xy
zx yx xx
1 0 0
0 1 0
0 0 1
92
dove I il tensore identit e il tensore degli sforzi viscosi, che si annulla
quando il fluido fermo o ideale.
Risultante delle forze infinitesime superficiali
Dopo questa premessa, si esprimano le forze superficiali agenti su un piccolo
elemento cubico di fluido in termini di sforzi agenti sulle facce dellelemento,
mettendo poi in relazione le grandezze sulle facce con quelle agenti nel centro
del volume infinitesimo, mediante sviluppo in serie di Taylor. Effettuando
questa operazione inizialmente per tutte le componenti di sforzo agenti nella
direzione coordinata x (figura 6.4), si ottiene
| | ( ) ( ) y x z x z y F
z z
zx
z z
zx
y y
yx
y y
yx
x x
x
x x
x
x dir
up s
d d d d d d d
d d
d d
d d +
+
+
+ |
.
|
\
|
+ =
Figura 6.4: Volume infinitesimo, sollecitazioni agenti lungo la direzione x
Tramite sviluppo in serie di Taylor si ha:
( ) z y x
x
z y
x
x x
x
x x
x
d d d d d
d d
=
+
z x y
y
z x
yx
y y
yx
y y
yx
d d d d d
d d
= |
.
|
\
|
+
x
z
y
x
z
y
zx
zx
yx
yx
zx
zx
yx
yx
93
( ) y x z
z
y x
zx
z z
zx
z z
zx
d d d d d
d d
=
+
Da cui
| | z y x
z y x
F
zx
yx
x
x dir
up s
d d d d
|
|
.
|
\
|
E, ricordando che
= +
, e che z y x d d d d =
| |
(
|
|
.
|
\
|
d d
z y x x
p
F
zx
yx
xx
x dir
up s
che rappresenta la componente nella direzione della forza superficiale
(infinitesima) agente sul volume infinitesimo considerato. Nelle altre direzioni
coordinate si ha
| |
(
|
|
.
|
\
|
d d
z y x y
p
F
zy yy xy
y dir
up s
| |
(
|
|
.
|
\
|
d d
z y x z
p
F
zz
yz
xz
z dir
up s
Sommando vettorialmente i componenti di forza relativi alle tre direzioni si
ottiene
| | | | | | | | | | + + = + + =
d d d d d d
I p p k F j F i F F
z dir
up s
y dir
up s
x dir
up s up s
Equazione della Quantit di Moto in forma differenziale
Le forze superficiali appena ricavate, unitamente alle forze gravitazionali
g F
grav
= d d , possono essere sostituite nella espressione della equazione di
conservazione della quantit di moto (6.9), qui riscritta per comodit
d
d
d
= d
+ d
(6.9)
94
Effettuando tale sostituzione e dividendo per il volume infinitesimo, si ottiene
la forma finale della Equazione di conservazione della Quantit di Moto in
forma differenziale, definita per un osservatore Lagrangiano
+ + =
p g
t
V
d
d
Dove
g
forze gravitazionali agenti sulla particella fluid, per unit di volume
p
forze normali di pressione, per unit di volume
forze viscose, per unit di volume
t
V
d
d
forze dinerzia relative alla particella fluida, per unit di volume
Si osservi come questa equazione sia molto simile a quella del moto di un fluido
perfetto (nel quale non sono presenti gli sforzi viscosi), ricavata nel capitolo 2 e
definita equazione di Eulero
=
d
d
95
6.4 Lequazione di Conservazione dellEnergia in forma differenziale.
Si gi ricavata nei precedenti paragrafi lequazione della Conservazione
dellEnergia per un volume di controllo finito, fisso e non deformabile
( ) W Q A n V e e
t t
E
CV CV
= +
=
d d
d
d
(6.10)
La (6.10) scritta con le convenzioni sul segno di calore e lavoro gi richiamate,
e dove con e si indicata la somma di diverse energie specifiche associate al
fluido, cio energia interna termodinamica, energia cinetica, energia potenziale
ed altre. Per semplicit si considerino solo le prime tre, in modo da scrivere, per
lenergia totale specifica (ad unit di massa)
gz
V
u e + + =
2
2
Il lavoro nellunit di tempo ( t W W d d =
) indicato nella (6.10) dovuto sia alla
presenza di elementi che possono convertire energia meccanica in energia del
fluido (e viceversa), sia alle diverse forze agenti sul volume di controllo,
identificabili nelle forze di pressione e in quelle tangenziali
+ + = W W W W
p sh
Si ricordi che la potenza prodotta da una forza applicata su un punto materiale
in moto data dal prodotto scalare della forza e del vettore velocit del punto.
Ad esempio, considerando forze normali e tangenziali su una faccia del
volumetto
( ) A n p V W
p
d d
=
( ) d d A t V W
Nelle precedenti i segni sono opposti a quelli normalmente utilizzati a causa
della convenzione qui utilizzata per il segno del lavoro. Inoltre, si possono
osservare i versori delle direzioni normale e tangenziale in ogni punto della
superficie di controllo, rispettivamente n
e t
. Sostituendo nella equazione
integrale dellenergia (6.10) si ha
96
+ +
dA
Se si suppone che il CV diventi infinitesimo (d), in esso non pu essere
scambiato lavoro meccanico. Ragionando come per lequazione della quantit
di moto, dopo alcuni passaggi si ha
() +
d = d
Se si sviluppano i termini come fatto per le precedenti equazioni integrali si
ottiene
=
|
.
|
\
|
+ W Q z y x p V
t
e
d d d d d
d
d
E, considerando le grandezze per unit di volume
= + W Q p V
t
e
d
d
(6.11)
Questa unespressione generale della equazione dellenergia, in forma
differenziale e per un osservatore Lagrangiano, nella quale occorre esplicitare,
per le particolari applicazioni, i termini che compaiono a secondo membro.
Calore in ingresso nellunit di tempo
Si consideri solo il calore trasmesso per conduzione attraverso le pareti del
volume di controllo infinitesimo. Il flusso di calore per conduzione (calore
trasmesso per unit di tempo e unit di superficie) regolato dalla legge di
Fourier
=
=
z
T
k q
y
T
k q
x
T
k q
T k q
z
y
x
w
z
v
y
97
dove:
k = coefficiente di conducibilit termica
T = temperatura assoluta
q
= vettore del flusso di calore per conduzione
Il flusso netto di energia termica attraverso la superficie del CV infinitesimo si
ottiene anche in questo caso dalla somma dei contributi attraverso le varie facce,
in ingresso ed in uscita. Procedendo in analogia a quanto fatto per le altre
equazioni si ottiene il flusso netto di calore fornito al volume di controllo
infinitesimo
z y x q z y x
z
q
y
q
x
q
Q
z
y
x
d d d ) ( d d d d
=
(
=
Considerando le grandezze per unit di volume e ricordando la legge di
Fourier, si ha
( ) T k q Q = =
(6.12)
Lavoro delle forze viscose nellunit di tempo
Per quanto riguarda il lavoro delle forze viscose sul volumetto infinitesimo, si
pu dimostrare che quello compiuto da tutte le componenti di sforzo dirette
secondo lasse x sulla faccia posizionata a + /2 dato da
d
+/2
=
dd
Si pu scrivere una espressione analoga per la faccia posizionata a /2 , e
sommare i contributi dopo aver effettuato uno sviluppo in serie di Taylor
intorno al punto centrale del volumetto. Si possono, inoltre, scrivere espressioni
analoghe nelle altre direzioni coordinatee, considerando il lavoro compiuto
dalle forze viscose nellunit di tempo, su tutte le facce del CV infinitesimo, si
ottiene
98
( ) ( ) ( ) z y x w v u
z
w v u
y
w v u
x
W
zz zy zx yz yy yx xz xy xx
d d d d
(
+ +
+ + +
+ + +
La precedente pu essere riscritta in forma compatta, dopo aver diviso per il
volume infinitesimo
( ) =
V W
(6.13)
Sostituendo, nella equazione dellenergia (6.11), le (6.12) e (6.13) si ottiene la
forma finale della Equazione dellEnergia in forma Differenziale
( ) + = + V p V Q
t
e
d
d
(6.14)
Il primo termine a primo membro la derivata temporale dellenergia vista
dalla particella nel suo percorso (derivata Lagrangiana o sostanziale), per unit
di volume. Essa risulta determinata dai termini relativi al secondo membro
della 6.14, cio al flusso termico per conduzione e per unit di volume, al lavoro
per unit di volume e unit di tempo delle forze di pressione e a quello delle
forze viscose.
6.5 Equazioni Fondamentali
Si riassumono di seguito le tre equazioni fondamentali per lo studio del moto
dei fluidi, in forma vettoriale e tensoriale cartesiana (Appendice D):
CONTINUITA n1 equazione scalare
( ) 0 = +
V
t
Forma Vettoriale
0
) (
=
i
i
x
v
t
Forma tensoriale Cartesiana
QUANTITA DI MOTO n1 equazione vettoriale n3 equazioni scalari
( ) + =
|
|
.
|
\
|
+
p g V V
t
V
t
V
d
d
99
j
ij
i
i
j
i
j
i
x x
p
g
x
v
u
t
v
=
|
|
.
|
\
|
ENERGIA n1 equazione scalare
( ) ( ) ( ) + =
V q V p
t
e
d
d
i
i
i
i
i
x
q
x
v
p
t
e
+
=
d
d
Quello appena scritto un sistema di equazioni non lineari alle derivate
parziali, in generale piuttosto complesso da risolvere. Ad esempio, per un gas
comprimibile a comportamento ideale, occorre considerare anche le equazioni
algebriche
RT
p
=
Legge di stato dei gas
T c u
v
= Relazione Energia interna-Temperatura
Le equazioni a disposizione sono pertanto 7, poich lequazione vettoriale della
Quantit di Moto corrisponde a 3 equazioni scalari.
Le variabili dipendenti, ovvero le incognite, sono le grandezze termo
fluidodinamiche , , , , , , ,
, per un totale di 13. Esse devono essere
determinate in funzione delle variabili indipendenti , , , .
Si evince che il problema matematico non ben posto, poich il numero di
incognite superiore a quello delle equazioni, e che il tutto dovuto alla
presenza delle variabili costituite dalle tensioni viscose. Si vedr nel seguito come
introdurre delle relazioni tra le tensioni tangenziali ed altre grandezze
incognite, rendendo il problema risolvibile.
Potrebbero piacerti anche
- Cronotermostato Ticino L4448Documento98 pagineCronotermostato Ticino L4448Giac0% (1)
- I.B. PolmonitiDocumento41 pagineI.B. PolmonitiMarynaNessuna valutazione finora
- Inglese Gianotti b2 Parte2Documento60 pagineInglese Gianotti b2 Parte2MarynaNessuna valutazione finora
- I B M ValvolariDocumento72 pagineI B M ValvolariMarynaNessuna valutazione finora
- Sca I.BDocumento90 pagineSca I.BMarynaNessuna valutazione finora
- I.B. TVPDocumento98 pagineI.B. TVPMarynaNessuna valutazione finora
- Inglese Gianotti b2 Parte1Documento39 pagineInglese Gianotti b2 Parte1MarynaNessuna valutazione finora
- 11 FLDDocumento10 pagine11 FLDMarynaNessuna valutazione finora
- I.B. Embolia PomonareDocumento99 pagineI.B. Embolia PomonareMarynaNessuna valutazione finora
- I.B. Malattie IntestinaliDocumento126 pagineI.B. Malattie IntestinaliMarynaNessuna valutazione finora
- 13 FLDDocumento6 pagine13 FLDMarynaNessuna valutazione finora
- I.B. CoagucheckDocumento30 pagineI.B. CoagucheckMarynaNessuna valutazione finora
- I Materiali PolimericiDocumento55 pagineI Materiali PolimericiMaryna100% (1)
- I.B. Ictus CerebriDocumento87 pagineI.B. Ictus CerebriMarynaNessuna valutazione finora
- 12 FLDDocumento5 pagine12 FLDMarynaNessuna valutazione finora
- 02 FLDDocumento34 pagine02 FLDMarynaNessuna valutazione finora
- 09 FLDDocumento11 pagine09 FLDMarynaNessuna valutazione finora
- 10 FLDDocumento6 pagine10 FLDMarynaNessuna valutazione finora
- 04 FLDDocumento12 pagine04 FLDMarynaNessuna valutazione finora
- 05 FLDDocumento6 pagine05 FLDMarynaNessuna valutazione finora
- 07 FLDDocumento10 pagine07 FLDMarynaNessuna valutazione finora
- 01 FLDDocumento16 pagine01 FLDMarynaNessuna valutazione finora
- Respirator I oDocumento18 pagineRespirator I oAlberta ToddeNessuna valutazione finora
- 03 FLDDocumento14 pagine03 FLDMarynaNessuna valutazione finora
- 08 FLDDocumento20 pagine08 FLDMarynaNessuna valutazione finora
- I Materiali CeramiciDocumento47 pagineI Materiali CeramiciMarynaNessuna valutazione finora
- Lez CuoreDocumento29 pagineLez CuoreMarynaNessuna valutazione finora
- CircolatorioDocumento29 pagineCircolatorioMarynaNessuna valutazione finora
- Lez CuoreDocumento29 pagineLez CuoreMarynaNessuna valutazione finora
- MotorioDocumento34 pagineMotorioMarynaNessuna valutazione finora
- Equazione Di Clausius-Clapeyron. Con I Relativi Esercizi - ChimicamoDocumento4 pagineEquazione Di Clausius-Clapeyron. Con I Relativi Esercizi - ChimicamoVale MilesNessuna valutazione finora
- Esercizi7 PDFDocumento10 pagineEsercizi7 PDFIvan Alberto NinaNessuna valutazione finora
- Lezione 3 - ConvezioneDocumento20 pagineLezione 3 - ConvezioneJonathan DomiziNessuna valutazione finora
- CalorimetroDocumento2 pagineCalorimetroilarfNessuna valutazione finora
- Esercizi 6Documento8 pagineEsercizi 6fabNessuna valutazione finora
- Cafetera Mukka Express PDFDocumento36 pagineCafetera Mukka Express PDFchicho50Nessuna valutazione finora
- Termodinamica EserciziDocumento18 pagineTermodinamica EserciziMichele ManigrassoNessuna valutazione finora
- Diagramma Psicrometrico Teoria Ed ApplicazioniDocumento25 pagineDiagramma Psicrometrico Teoria Ed ApplicazioniManuel Di RaimondoNessuna valutazione finora
- Calcul Evaporare PiscineDocumento18 pagineCalcul Evaporare Piscinemoraru_coriolanNessuna valutazione finora
- Oleodinamica 1Documento59 pagineOleodinamica 1Mauro63Nessuna valutazione finora