Potrebbero piacerti anche
- Tecniche Reticolari - 1 PDFDocumento20 pagineTecniche Reticolari - 1 PDFRenenesNessuna valutazione finora
- Appunti PanozzoDocumento67 pagineAppunti PanozzoManuel Di RaimondoNessuna valutazione finora
- Tutorial Matlab by IcpDocumento59 pagineTutorial Matlab by Icpilcristopagano666Nessuna valutazione finora
- Appunti Di AlgoritmiDocumento39 pagineAppunti Di AlgoritmiEmanuel RamaciNessuna valutazione finora
- LII-kottas-lau PWDocumento6 pagineLII-kottas-lau PWPaolo Emilio PucciNessuna valutazione finora
- Esercitazione Layout Per ProdottoDocumento6 pagineEsercitazione Layout Per ProdottoGiacNessuna valutazione finora
- Lezione03 Notazioni AsintoticheDocumento31 pagineLezione03 Notazioni AsintotichesmegmusNessuna valutazione finora
- Lezione02 Analisi AsintoticaDocumento35 pagineLezione02 Analisi AsintoticasmegmusNessuna valutazione finora
- Lezione05 AnalisiT (N)Documento37 pagineLezione05 AnalisiT (N)smegmusNessuna valutazione finora
- 3 Velocita Di Minimo CostoDocumento16 pagine3 Velocita Di Minimo Costoriccardo labiancaNessuna valutazione finora
- Esercizio Costo Di Tornitura Es - D5Documento2 pagineEsercizio Costo Di Tornitura Es - D5Francesco Prete100% (1)
- Esercizi Svolti Controllo DigitaleDocumento21 pagineEsercizi Svolti Controllo DigitalesikalieNessuna valutazione finora
- Cartelinos de ElaboraciómDocumento12 pagineCartelinos de ElaboraciómRefNessuna valutazione finora
- Il Layout Degli ImpiantiDocumento15 pagineIl Layout Degli ImpiantiPieroNacciNessuna valutazione finora
- Guida Matlab PDFDocumento50 pagineGuida Matlab PDFpinoNessuna valutazione finora
- Appunti de Carlo PDFDocumento43 pagineAppunti de Carlo PDFGabriele Dall'olmoNessuna valutazione finora
- Rate MonotonicDocumento18 pagineRate MonotonicFrancesco Sisko CarboneNessuna valutazione finora
- Esercizi Layout 2007Documento8 pagineEsercizi Layout 2007Dario Daddà TurresNessuna valutazione finora
- Introduzione A MatlabDocumento32 pagineIntroduzione A Matlabgiordanobi859641Nessuna valutazione finora
- 4-06 JitDocumento41 pagine4-06 JitwdfoNessuna valutazione finora
- 02 Costi ComputazionaliDocumento9 pagine02 Costi ComputazionaliFabio RongioneNessuna valutazione finora
- Strade, Ferrovie, Aeroporti - EserciziDocumento56 pagineStrade, Ferrovie, Aeroporti - EserciziGianlucaNessuna valutazione finora
- 01b-Complessita Computazionale PDFDocumento26 pagine01b-Complessita Computazionale PDFgooleeaNessuna valutazione finora
- Tesina Algoritmo PDFDocumento78 pagineTesina Algoritmo PDFFernando Rodríguez GómezNessuna valutazione finora
- 1 Appello Del 18-06-2021Documento2 pagine1 Appello Del 18-06-2021Nico RuggieroNessuna valutazione finora
- Dispensa MatlabDocumento24 pagineDispensa MatlabFerdinandoooNessuna valutazione finora
- Signali Sistemi ZbirkaDocumento138 pagineSignali Sistemi Zbirkaviktorija bezhovskaNessuna valutazione finora
- Analisi ComputazionaleDocumento9 pagineAnalisi ComputazionaleRosario TurcoNessuna valutazione finora
- Cronotermostato Ticino L4448Documento98 pagineCronotermostato Ticino L4448Giac0% (1)
- Le Terne Pitagoriche ParticolariDocumento7 pagineLe Terne Pitagoriche ParticolarimIauditNessuna valutazione finora
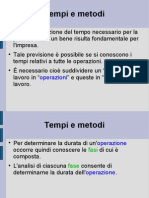
- Lezione n.1 Tempi e MetodiDocumento14 pagineLezione n.1 Tempi e MetodiCosimo RizzoNessuna valutazione finora
- Tutorial MatlabDocumento22 pagineTutorial MatlabSilvio Bob MarconNessuna valutazione finora
- GravitazioneDocumento15 pagineGravitazioneTirton 701Nessuna valutazione finora
- Esercizi PLC - S7200 PDFDocumento30 pagineEsercizi PLC - S7200 PDFand0% (1)
- Modulo2 PDFDocumento14 pagineModulo2 PDFMartina ElleNessuna valutazione finora
- Esercizi PannocchiaDocumento3 pagineEsercizi PannocchiaMarco Sampei97Nessuna valutazione finora
- Sistemi Organizzativi Docente - Stefano Smriglio Stefano - Smriglio@univaq - ItDocumento209 pagineSistemi Organizzativi Docente - Stefano Smriglio Stefano - Smriglio@univaq - ItMarco CotrinoNessuna valutazione finora
- Progetto Corso 2 RiassuntiDocumento208 pagineProgetto Corso 2 RiassuntiPaoloPetragliaNessuna valutazione finora
- Fonderia Seconda ParteDocumento35 pagineFonderia Seconda ParteRosa LucaselliNessuna valutazione finora
- Sistemi Operativi 5Documento4 pagineSistemi Operativi 5paolo the best(ia)Nessuna valutazione finora
- Il Cronoprogramma Dei LavoriDocumento12 pagineIl Cronoprogramma Dei LavoriRiccardo100% (1)
- Calcolo Parallelo - Riassunto Sbobbinato Slide.Documento25 pagineCalcolo Parallelo - Riassunto Sbobbinato Slide.Angelo Borrelli0% (1)
- FourierDocumento81 pagineFourierMarco LombardiNessuna valutazione finora
- PID DigitaleDocumento26 paginePID DigitaleAndrea BravaccinoNessuna valutazione finora
- 01 Lezione Motivazioni PipelineDocumento33 pagine01 Lezione Motivazioni PipelineAgostinoNessuna valutazione finora
- 13-CE-DLX Sequenziale PDFDocumento61 pagine13-CE-DLX Sequenziale PDFBBNessuna valutazione finora
- (ASE) FormularioDocumento9 pagine(ASE) FormularioDamian DutkaNessuna valutazione finora
- T1 - Tecniche Di Calcolo Integrale Con Esercizi PDFDocumento14 pagineT1 - Tecniche Di Calcolo Integrale Con Esercizi PDFzuppazuppoNessuna valutazione finora
- Elementi Di Architettura e Sistemi Operativi: Bioinformatica - Tiziano VillaDocumento18 pagineElementi Di Architettura e Sistemi Operativi: Bioinformatica - Tiziano Villaapi-253266324Nessuna valutazione finora
- 01 - Introduzione Al CorsoDocumento17 pagine01 - Introduzione Al CorsoEdoardo dottoriNessuna valutazione finora
- Esercitazione 3 Scheduling Dei ProcessiDocumento6 pagineEsercitazione 3 Scheduling Dei ProcessiPatrickNessuna valutazione finora
- EserciziPerEsame 2009-10Documento25 pagineEserciziPerEsame 2009-10Gianluca MastelloNessuna valutazione finora
- Geomatica Ambientale PDFDocumento58 pagineGeomatica Ambientale PDFFulvio MiloccoNessuna valutazione finora
- Compressore Alternativo MonostadioDocumento13 pagineCompressore Alternativo MonostadioPopa PetronelaNessuna valutazione finora
- Fisica: cinematica 1 con Scratch: Esperimenti con Scratch sul moto con uso del calcolo numericoDa EverandFisica: cinematica 1 con Scratch: Esperimenti con Scratch sul moto con uso del calcolo numericoNessuna valutazione finora
- Introduzione pratica alla programmazione in C++ - Parte PrimaDa EverandIntroduzione pratica alla programmazione in C++ - Parte PrimaNessuna valutazione finora
- Verifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPDa EverandVerifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPNessuna valutazione finora