Potrebbero piacerti anche
- Centralini Cloud: l'innovazione che semplifica il tuo business: Il piano marketing applicato alla PMI TLC Telecomunicazioni per i centralini 3CXDa EverandCentralini Cloud: l'innovazione che semplifica il tuo business: Il piano marketing applicato alla PMI TLC Telecomunicazioni per i centralini 3CXNessuna valutazione finora
- نسخة المستندDocumento6 pagineنسخة المستند2c2nr7p4w9Nessuna valutazione finora
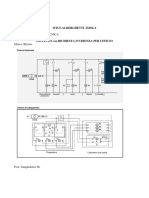
- 2 - Caratteristiche PLC 2 PagineDocumento2 pagine2 - Caratteristiche PLC 2 Paginebruno sculliNessuna valutazione finora
- 1.1 Introduzione PLCDocumento27 pagine1.1 Introduzione PLCandNessuna valutazione finora
- Dispensa Sul PLCDocumento38 pagineDispensa Sul PLCMarcoNessuna valutazione finora
- Panoramica sulle principali metodologie per la sicurezza in ambito automotiveDa EverandPanoramica sulle principali metodologie per la sicurezza in ambito automotiveNessuna valutazione finora
- PLCDocumento6 paginePLCcontusara03Nessuna valutazione finora
- Dispensa Introduttiva Sui PLCDocumento31 pagineDispensa Introduttiva Sui PLCantonyginoNessuna valutazione finora
- Generalita PLC Parte 3&4Documento23 pagineGeneralita PLC Parte 3&4Francesco TozzettiNessuna valutazione finora
- Dispense PLCDocumento54 pagineDispense PLCGiuseppe OnorevoliNessuna valutazione finora
- Corso PLC Con EsercitazioniDocumento11 pagineCorso PLC Con Esercitazionimax_ingNessuna valutazione finora
- Introduzione Alla ProgrammazioneDocumento41 pagineIntroduzione Alla Programmazionemassimo_marcon_1970Nessuna valutazione finora
- Dispensa Introduttiva Sui PLC-Utile Per La Sezione GuastiDocumento31 pagineDispensa Introduttiva Sui PLC-Utile Per La Sezione Guastiglicinedelcosmo22100% (1)
- Generalit Á Su PLC - SDocumento14 pagineGeneralit Á Su PLC - SSimone RoncoroniNessuna valutazione finora
- Manuale PLC SoftwareDocumento65 pagineManuale PLC SoftwareDarioCasiniNessuna valutazione finora
- PLC S71200 Easy Book ITDocumento466 paginePLC S71200 Easy Book ITAladarMezilNessuna valutazione finora
- 05 PLC Architettura 2Documento34 pagine05 PLC Architettura 2matteo2009Nessuna valutazione finora
- Lezione 02 20182019Documento55 pagineLezione 02 20182019alessandro bisoffiNessuna valutazione finora
- Manuale PLC Software PDFDocumento65 pagineManuale PLC Software PDFmax_ingNessuna valutazione finora
- Zanichelli - Cap6 Volume2 SintesiDocumento1 paginaZanichelli - Cap6 Volume2 SintesiEnrico TotiNessuna valutazione finora
- Ma CNC I Std1 1.3Documento257 pagineMa CNC I Std1 1.3SimoneNessuna valutazione finora
- Guida Simatic Safety Integrated 202003Documento62 pagineGuida Simatic Safety Integrated 202003Mirko MirkoNessuna valutazione finora
- Manuale Siemens s7 Con EserciziDocumento120 pagineManuale Siemens s7 Con Esercizimisu77Nessuna valutazione finora
- Pic MIDI DocumentationDocumento15 paginePic MIDI DocumentationgopilsnNessuna valutazione finora
- 1.4-Panoramica PLC SiemensDocumento10 pagine1.4-Panoramica PLC SiemensandNessuna valutazione finora
- FCT SeriesDocumento24 pagineFCT SeriesÖnder ÖzcanNessuna valutazione finora
- Micro Control LoreDocumento10 pagineMicro Control LoresikalieNessuna valutazione finora
- Guida MSP430Documento126 pagineGuida MSP430giordanobi859641Nessuna valutazione finora
- FB Dispensa Modulo3Documento10 pagineFB Dispensa Modulo3NacheteNessuna valutazione finora
- Dispensa Per Il Corso Sulla Totally Integrated Automation (T.I.A.)Documento48 pagineDispensa Per Il Corso Sulla Totally Integrated Automation (T.I.A.)JMNessuna valutazione finora
- VHDLDocumento53 pagineVHDLLorenzo Lollo BecchettiNessuna valutazione finora
- Progettazione ElettronicaDocumento24 pagineProgettazione ElettronicaNational Instruments Italy100% (1)
- Brochure Simatic-Controller ItDocumento92 pagineBrochure Simatic-Controller ItEnrico 'Spy' LovatoNessuna valutazione finora
- Conversione S7 RockwellDocumento162 pagineConversione S7 RockwellDanieleNessuna valutazione finora
- CP S7 Per Industrial EthernetDocumento310 pagineCP S7 Per Industrial Ethernetyukaokto2Nessuna valutazione finora
- Modulo 1 - Elementi Di Hardware Del PLC s7-1200 SiemensDocumento17 pagineModulo 1 - Elementi Di Hardware Del PLC s7-1200 SiemensFrancesco MedinaNessuna valutazione finora
- KOP IDocumento210 pagineKOP IAlessandro InvitiNessuna valutazione finora
- Programmare I PIC Con IC-Prog PDFDocumento3 pagineProgrammare I PIC Con IC-Prog PDFantoninoxxxNessuna valutazione finora
- PLC e Automazione IndustrialeDocumento17 paginePLC e Automazione IndustrialeFadetwoNessuna valutazione finora
- Is3000 Brochure PDFDocumento8 pagineIs3000 Brochure PDFmaxgersonNessuna valutazione finora
- s7200 System Manual It-ITDocumento564 pagines7200 System Manual It-ITDomenico IracàNessuna valutazione finora
- 4003 Europlus 10Documento56 pagine4003 Europlus 10stefanotomasi1235Nessuna valutazione finora
- Struttura PLC SDocumento20 pagineStruttura PLC SSimone RoncoroniNessuna valutazione finora
- s71200 Easy Book It-IT It-ITDocumento138 pagines71200 Easy Book It-IT It-ITmax2007Nessuna valutazione finora
- Pic by ExamplesDocumento163 paginePic by ExamplesSubZer076100% (1)
- 1 Introduzione FPGA, Principi Di Design e Richiami Di VHDLDocumento70 pagine1 Introduzione FPGA, Principi Di Design e Richiami Di VHDLMichelangelo VetrugnoNessuna valutazione finora
- 2013 - 1.10 - 32 - S7-1500 - TIA - Portal V12 - SP1 - TIA-SELECTION - TOOL - LUG-2013-nocDocumento28 pagine2013 - 1.10 - 32 - S7-1500 - TIA - Portal V12 - SP1 - TIA-SELECTION - TOOL - LUG-2013-nocmatius.qNessuna valutazione finora
- Fare Elettronica - MikroC by ExampleDocumento80 pagineFare Elettronica - MikroC by Examplealonsoty100% (1)
- Mikroc Interfaccia Rs 232Documento6 pagineMikroc Interfaccia Rs 232clNessuna valutazione finora
- Architettura Dei Sistemi Midrange: Guida Alla SelezioneDocumento64 pagineArchitettura Dei Sistemi Midrange: Guida Alla Selezionesnow69yNessuna valutazione finora
- Automazione Industriale: Esercitazione 1Documento19 pagineAutomazione Industriale: Esercitazione 1Ginevra GabucciNessuna valutazione finora
- SCE S7-1200 Temporizzatori e ContatoriDocumento52 pagineSCE S7-1200 Temporizzatori e ContatoriPopa PetronelaNessuna valutazione finora
- Siemens Step 7Documento33 pagineSiemens Step 7Lincoln AntonioNessuna valutazione finora
- Icon500 DatasheetDocumento2 pagineIcon500 DatasheetPaoloNessuna valutazione finora
- Tecnoalarm Manuale TP888 PDFDocumento68 pagineTecnoalarm Manuale TP888 PDFalroma111266Nessuna valutazione finora
- IntroDocumento7 pagineIntrofcNessuna valutazione finora
- Allegro GiulianiDocumento15 pagineAllegro GiulianiChitarra Creativa ProfessionalNessuna valutazione finora
- L Acura ShortDocumento25 pagineL Acura ShortEnrico TotiNessuna valutazione finora
- Richiesta Udienza Ufficio SchemaDocumento1 paginaRichiesta Udienza Ufficio SchemaEnrico TotiNessuna valutazione finora
- Calcolatori-Sistemi Di Numerazione e Logica-V2-0Documento46 pagineCalcolatori-Sistemi Di Numerazione e Logica-V2-0Enrico TotiNessuna valutazione finora
- Riassunto Concetti Sulla ManutenzioneDocumento14 pagineRiassunto Concetti Sulla ManutenzioneEnrico TotiNessuna valutazione finora
- Metaverso: La guida visionaria per principianti per scoprire ed investire nelle Terre Virtuali, nei giochi nella blockchain, nell’arte digitale degli NFT e nelle affascinanti tecnologie del VRDa EverandMetaverso: La guida visionaria per principianti per scoprire ed investire nelle Terre Virtuali, nei giochi nella blockchain, nell’arte digitale degli NFT e nelle affascinanti tecnologie del VRValutazione: 5 su 5 stelle5/5 (8)
- Expert secrets: Come i migliori esperti e consulenti possono crescere onlineDa EverandExpert secrets: Come i migliori esperti e consulenti possono crescere onlineNessuna valutazione finora
- Dal Cad al Web: Il Codice dell’Amministrazione Digitale per TuttiDa EverandDal Cad al Web: Il Codice dell’Amministrazione Digitale per TuttiNessuna valutazione finora
- Manuale d'uso per Networker: 7 Segreti per Sponsorizzare con SuccessoDa EverandManuale d'uso per Networker: 7 Segreti per Sponsorizzare con SuccessoNessuna valutazione finora
- SQL per principianti: imparate l'uso dei database Microsoft SQL Server, MySQL, PostgreSQL e OracleDa EverandSQL per principianti: imparate l'uso dei database Microsoft SQL Server, MySQL, PostgreSQL e OracleNessuna valutazione finora
- Nuovo Esame per Esperto in Gestione dell'Energia - Settore Civile: Test e temi di esame svolti per sostenere l’esame di Esperto in Gestione dell’Energia del Settore CivileDa EverandNuovo Esame per Esperto in Gestione dell'Energia - Settore Civile: Test e temi di esame svolti per sostenere l’esame di Esperto in Gestione dell’Energia del Settore CivileNessuna valutazione finora
- Dotcom secrets: Il bestseller mondiale per fare business onlineDa EverandDotcom secrets: Il bestseller mondiale per fare business onlineNessuna valutazione finora
- Autodesk Inventor | Passo dopo Passo: Progettazione CAD e Simulazione FEM con Autodesk Inventor per PrincipiantiDa EverandAutodesk Inventor | Passo dopo Passo: Progettazione CAD e Simulazione FEM con Autodesk Inventor per PrincipiantiNessuna valutazione finora
- Il montaggio efficace: Guida all’uso di ShotcutDa EverandIl montaggio efficace: Guida all’uso di ShotcutNessuna valutazione finora
- Altro Evo, l'Album delle illustrazioni: Digital painting, sword and sorcery fantasy art bookDa EverandAltro Evo, l'Album delle illustrazioni: Digital painting, sword and sorcery fantasy art bookNessuna valutazione finora
- Javascript: Un Manuale Per Imparare La Programmazione In JavascriptDa EverandJavascript: Un Manuale Per Imparare La Programmazione In JavascriptNessuna valutazione finora
- PHP: Guida Completa allo Sviluppo e Programmazione di Siti Web Dinamici. Contiene Esempi di Codice ed Esercizi Pratici.Da EverandPHP: Guida Completa allo Sviluppo e Programmazione di Siti Web Dinamici. Contiene Esempi di Codice ed Esercizi Pratici.Nessuna valutazione finora
- Python: Guida Completa alla Programmazione: La collezione informaticaDa EverandPython: Guida Completa alla Programmazione: La collezione informaticaNessuna valutazione finora
- Elettrotecnica Generale: Circuiti Elettrici in Regime StazionarioDa EverandElettrotecnica Generale: Circuiti Elettrici in Regime StazionarioNessuna valutazione finora