Potrebbero piacerti anche
- Formulario Di Statistica Con RDocumento247 pagineFormulario Di Statistica Con RDalila SartorNessuna valutazione finora
- Esercizi StatisticaDocumento3 pagineEsercizi StatisticaFilippo Bianchi50% (2)
- Matlab Per L'ingegnere ChimicoDocumento61 pagineMatlab Per L'ingegnere ChimicoStefano Valsecchi100% (1)
- I Dispositivi Per Lo Sfruttamento Dell'energia Del Moto Ondoso - Wave Energy ConvertersDocumento70 pagineI Dispositivi Per Lo Sfruttamento Dell'energia Del Moto Ondoso - Wave Energy ConvertersdamiNessuna valutazione finora
- M. Vento, P. Foggia, Algoritmi e Strutture Dati (Ed. 1.3) (2010)Documento295 pagineM. Vento, P. Foggia, Algoritmi e Strutture Dati (Ed. 1.3) (2010)Andrea SpitaleNessuna valutazione finora
- Statistica Con RDocumento37 pagineStatistica Con RRaffaella BenettiNessuna valutazione finora
- 1997 Campagnolo Spare Parts CatalogDocumento89 pagine1997 Campagnolo Spare Parts CatalogC100% (1)
- VHDLDocumento53 pagineVHDLLorenzo Lollo BecchettiNessuna valutazione finora
- Scrivere La Tesi Di Laurea in LATEXDocumento62 pagineScrivere La Tesi Di Laurea in LATEXcapranzoloNessuna valutazione finora
- Borland C++ Builder 6 Per Windows - Guida Alla ProgrammazioneDocumento1.378 pagineBorland C++ Builder 6 Per Windows - Guida Alla ProgrammazioneGiovanni RizzutiNessuna valutazione finora
- Scrivere Tesi Con LatexDocumento35 pagineScrivere Tesi Con Latexandyengine100% (2)
- Tesi Alessandro PretiDocumento82 pagineTesi Alessandro Pretianon_253013088Nessuna valutazione finora
- 1 Introduzione FPGA, Principi Di Design e Richiami Di VHDLDocumento70 pagine1 Introduzione FPGA, Principi Di Design e Richiami Di VHDLMichelangelo VetrugnoNessuna valutazione finora
- Elettronica Di Potenza PDFDocumento24 pagineElettronica Di Potenza PDFrbencicNessuna valutazione finora
- Visual Basic 2008 PDFDocumento98 pagineVisual Basic 2008 PDFpinaNessuna valutazione finora
- Guida OpenCVDocumento5 pagineGuida OpenCVAngelo Giuseppe SpinosaNessuna valutazione finora
- PythonDocumento48 paginePythonAlessandro FoxNessuna valutazione finora
- Strumentazione Biomedica 2.1Documento74 pagineStrumentazione Biomedica 2.1andreagiovaNessuna valutazione finora
- OOP Java ItaDocumento313 pagineOOP Java ItaKiryl ShvachkaNessuna valutazione finora
- Controllo Digitale Di Sistemi Dinamici PDFDocumento35 pagineControllo Digitale Di Sistemi Dinamici PDFigino casaniNessuna valutazione finora
- Integratore Adattivo Con Il Metodo Di Cavalieri - SimpsonDocumento9 pagineIntegratore Adattivo Con Il Metodo Di Cavalieri - SimpsonalbeilmateNessuna valutazione finora
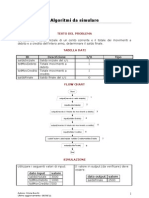
- Algoritmi Da SimulareDocumento3 pagineAlgoritmi Da SimulareCinzia BocchiNessuna valutazione finora
- Appunti Python BaseDocumento4 pagineAppunti Python BaseGiovanniNessuna valutazione finora
- Big DataDocumento18 pagineBig DataEmanuele TrankiloNessuna valutazione finora
- Testi D'esameDocumento18 pagineTesti D'esameMichele ScipioniNessuna valutazione finora
- CONWIPDocumento55 pagineCONWIPyuchiychiNessuna valutazione finora
- Quarteroni Saleri Gervasio - Calcolo Scientifico. Esercizi e Problemi Risolti Con MATLAB e Octave 5a EdizioneDocumento14 pagineQuarteroni Saleri Gervasio - Calcolo Scientifico. Esercizi e Problemi Risolti Con MATLAB e Octave 5a Edizionebrunobrambilla90Nessuna valutazione finora
- Fisica: dinamica 2 con Scratch: Esperimenti con Scratch sui moti oscillatori per mezzo di simulazioni numeriche.Da EverandFisica: dinamica 2 con Scratch: Esperimenti con Scratch sui moti oscillatori per mezzo di simulazioni numeriche.Nessuna valutazione finora
- Relazione Sui Linguaggi Di ProgrammazioneDocumento2 pagineRelazione Sui Linguaggi Di ProgrammazioneGiacomoQuNessuna valutazione finora
- Differenze FiniteDocumento18 pagineDifferenze FiniteStefano Del TedescoNessuna valutazione finora
- Questionario ExcelDocumento4 pagineQuestionario Excelapi-26739434100% (1)
- Tutta La MatematicaDocumento1.343 pagineTutta La Matematicacuppls100% (1)
- 10 Minute (WX) Maxima TutorialDocumento4 pagine10 Minute (WX) Maxima TutorialverbicarNessuna valutazione finora
- CENTEC-Presentazione CAD-CAE Open SourceDocumento20 pagineCENTEC-Presentazione CAD-CAE Open SourceFrancesco RamaccioniNessuna valutazione finora
- Sistemi DinamiciDocumento189 pagineSistemi DinamicipugliaNessuna valutazione finora
- Ejercicios LabviewDocumento24 pagineEjercicios LabviewAnonymous TlGnQZv5d7Nessuna valutazione finora
- EserciziarioDocumento166 pagineEserciziarioLorenzo CattaniNessuna valutazione finora
- Appunti Java.12.02Documento58 pagineAppunti Java.12.02Francesco DesantisNessuna valutazione finora
- Listati Libro Bellini GuidiDocumento84 pagineListati Libro Bellini GuidiMatteoLentiNessuna valutazione finora
- FT Tulino - Esercizi Teoria Dei SegnaliDocumento49 pagineFT Tulino - Esercizi Teoria Dei SegnalitotoscibettaNessuna valutazione finora
- Welcome To Oracle 12cDocumento439 pagineWelcome To Oracle 12csexmagnusNessuna valutazione finora
- Calcolo Delle Probabilità - Varie (Antonelli)Documento39 pagineCalcolo Delle Probabilità - Varie (Antonelli)lmaurizio110Nessuna valutazione finora
- Metodi Matematici Per L'informaticaDocumento65 pagineMetodi Matematici Per L'informaticaValerioNessuna valutazione finora
- Reti Di Petri - Classi e Principali EstensioniDocumento35 pagineReti Di Petri - Classi e Principali EstensioniLuigi FilanninoNessuna valutazione finora
- Libro. C#. Le Basi Per Tutti - Impara A Programmare Per Il Mondo .NET (Esperto in UDocumento119 pagineLibro. C#. Le Basi Per Tutti - Impara A Programmare Per Il Mondo .NET (Esperto in Ustefano franchiNessuna valutazione finora
- Interazioni Fondamentali, Gravità e StringheDocumento120 pagineInterazioni Fondamentali, Gravità e StringheAntonio LatorreNessuna valutazione finora
- Controlli Automatici - IDocumento11 pagineControlli Automatici - IgiuliobomberNessuna valutazione finora
- Monitoraggio Degli Impianti Di SollevamentoDocumento71 pagineMonitoraggio Degli Impianti Di SollevamentoascensorimNessuna valutazione finora
- Manuale Uso e Manutenzione Citroen C1 ItalianoDocumento69 pagineManuale Uso e Manutenzione Citroen C1 ItalianoandaloNessuna valutazione finora
- 1d002554 - Manuale - Istruzioni Antifurto PiaggioDocumento39 pagine1d002554 - Manuale - Istruzioni Antifurto Piaggioarmando manfrediNessuna valutazione finora
- 6.3 UnitatedaphneDocumento44 pagine6.3 Unitatedaphnetidachin0% (1)
- UG40 User ManualDocumento60 pagineUG40 User ManualHasib KhanNessuna valutazione finora
- Ese ComauDocumento13 pagineEse ComauPio Rocco AgogliaNessuna valutazione finora
- Allarme Ascensore Normativa, Sistema Di Telesoccorso e Terminali VivavoceDocumento1 paginaAllarme Ascensore Normativa, Sistema Di Telesoccorso e Terminali Vivavoceroby41965gmail.comNessuna valutazione finora
- ZW-Cam680.1 ItDocumento22 pagineZW-Cam680.1 ItAnonymous RcxX0FcNessuna valutazione finora
- Manual Panel OperadorDocumento41 pagineManual Panel OperadorCesarAgustinAlvaradoNessuna valutazione finora
- SIPDocumento154 pagineSIP92piovaNessuna valutazione finora
- Corso PLCDocumento251 pagineCorso PLCClaudio Leonardo MorettiNessuna valutazione finora
- Corso Conduzione Generatori Vapore Lezione 6Documento61 pagineCorso Conduzione Generatori Vapore Lezione 6lorytechNessuna valutazione finora
- Esercitazione Controlli Automatici N°9Documento14 pagineEsercitazione Controlli Automatici N°9Alessandro PilloniNessuna valutazione finora