Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Giornale Di Fisica 04/1999
Caricato da
Mark_DVTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Giornale Di Fisica 04/1999
Caricato da
Mark_DVCopyright:
Formati disponibili
4
GIORNALE
DI FISICA
Vol. XL
Ottobre-Dicembre
1999
SOMMARIO
qL LETTURE SCIENTIFICHE
pag. A. Drago e G.A. La Sala
193 La dinamica dellurto in Leibniz.
205 O. Levrini
Relativit ristretta e la concezione di spazio.
qQ QUESTIONI DIDATTICHE
221 A. Berra e L. Stefanini
Didattica dei moti planetari.
233 M. Caporaloni e R. Ambrosini
Confronti fra scale di tempo: GPS ed oscillatori al quarzo.
qI INDICI
245 INDICI DEL VOLUME XL
qC IN COPERTINA
Ritratto di G.W. von Leibniz (vedi articolo di A. Drago et al. a p. 193).
1. Introduzione.
La meccanica di Leibniz ci appare
come un valido inizio di una teoria mecca-
nica, alternativa a quella di Newton, per-
che non e basata su spazio, tempo e forza,
ma e basata sull'energia. Essa puo essere
vista come l'inizio di una meccanica diver-
sa, che poi si sviluppera piu tardi nell'opera
di Lazare Carnot (in meccanica) e, per un
altro campo di fenomeni, con l'opera di S.
Carnot (in termodinamica).
In altre occasioni [1], abbiamo presen-
tato L'Essay de dynamique del 1692 (in
edizione critica ed in edizione didattica) ed
abbiamo preparato L'Essay de dynamique
sur les lois du mouvement del 1698.
Qui intendiamo proporre un'analisi
comparata di due saggi di Leibniz: l'Essay
de dynamique e l'Essay de dynamique sur
les lois du mouvement, per quelle parti che
riguardano i fenomeni di urto, con l'inten-
to di mettere in luce come Leibniz giunga
ad una chiara definizione delle leggi del-
l'urto, secondo la sua idealizzazione dei
corpi come elastici, in alternativa a quella
di Wallis e Newton dei corpi perfettamente
duri (abbandonata, perche deviante, solo
nel 1850).
2. L'urto nell'opera del 1692.
Gia l'Essay de dynamique [2] presen-
ta ragionamenti sui fenomeni dell'urto,
campo molto attraente al tempo di Leibniz
per teorizzare senza la forza newtoniana.
In particolare (Postulato 1 e nota rela-
tiva), Leibniz mette in evidenza come, con-
trariamente a quanto sostenuto dai carte-
siani, possa avvenire uno scambio di tutta
l'energia da un corpo piccolo A ad un
corpo grande B o viceversa. Il suo postu-
lato e sintetizzabile con i seguenti punti
fondamentali:
non importa in che modo avviene lo
scambio;
basta solo che prima dell'urto e in moto
solo A e dopo l'urto e in moto solo B;
il trasferimento di energia cinetica da A
a B puo avvenire secondo un certo mecca-
nismo; per assicurarlo, basta che non sia
impossibile immaginarlo.
In realta in termini moderni occorre
aggiungere:
1) contrariamente a quanto affermato
nel primo punto, il modo con cui avviene
l'urto per corpi estesi e importante; comun-
que nel se guito intenderemo l'urto nell'i-
potesi piu favorevole a Leibniz, quella di
corpi puntiformi;
2) le conservazioni valide moderna-
mente, quelle della quantita di moto e
dell'energia cinetica, indicano che il caso
scelto nel secondo punto, lo scambio totale
di energia, c'e solo quando i due corpi
hanno uguale massa; inoltre e da notare
che Leibniz, in effetti, si riferisce solo ai
LETTURE SCIENTIFICHE L
La dinamica dell'urto in Leibniz.
A. Drago e G.A. La Sala
Gruppo di Storia della Fisica, Dipartimento di Scienze Fisiche, Universita Federico II -
Napoli
GIORNALE DI FISICA Ottobre-Dicembre 1999 VOL. XL, N. 4
corpi elastici, come se fossero gli unici nella
realta ;
3) infine, un meccanismo di trasferi-
mento di tutta l'energia cinetica da un
corpo ad un altro richiede in realta un terzo
corpo (molla, ad esempio), e non e banale.
Andando avanti nella lettura dell'Es-
say de dynamique (nota proposizione 9)
Leibniz calcola matematicamente l'urto
tra due corpi A e B, aventi:
corpo massa velocita prima velocita dopo
A m V v
0
B M V V'
Egli dice che c'e un caso particolare di
urto in cui si conservano sia le quantita di
motosia le energie; ma sbaglia adindicarlo:
cio accade tutte le volte che i corpi vanno
da un medesimo lato sia prima che dopo
l'urto; in tal caso, egli prosegue, vale
l'uguaglianza delle differenze delle velocita
prima e dopo l'urto, a meno del segno; cioe ,
conservazione delle quantita moto:
mv MV mv
0
MV
0
;
conservazione dell'energia:
mv
2
MV
2
mv
0 2
MV
0 2
;
cioe vale la relativita del moto
v V V
0
v
0
:
Quindi in questa opera Leibniz non
pone la relativita del moto come relazione
generale. La sua polemica famosa delle
forze vive, che si opponeva alla conserva-
zione della quantita di moto come intesa
dai cartesiani (in valor solo assoluto), non
gli aveva fatto ancora maturare la conser-
vazione della quantita di moto(dalui intesa
come vettore) in generale. Cioe , in questo
primo saggio, Leibniz non riconosce la
validita generale delle leggi fondamentali
dell'urto e nemmeno la relativita dei moti.
3. L'urto nell'opera del 1695.
Ma gia nel 1692 Leibniz inizia un epi-
stolario con Huygens a proposito dei corpi
duri, quel concetto che ostacolava una
comprensione delle leggi dell'urto; che era-
no state date da Huygens, ma parlando di
corpi duri. Nelle sue lettere Leibniz gli
oppone la sua concezione dei corpi elastici
e alla fine sembra convincerlo. Cosicche
storicamente anche questa idea fisica, che e
basilare per le leggi dell'urto, gli deve essere
associata con chiarezza [3].
L'argomento di questo epistolario si
incrocia con un altro argomento, sempre
essenziale per le leggi dell'urto: quello della
relativita del moto; su di esso i due discu-
tono fino al 1694. Per Huygens questa
relativita vale, ma non per i moti circolari;
al contrario, Leibniz vuole estenderla an-
che a questi moti. Anche qui Leibniz sem-
bra prevalere su Huygens [4]. Di fatto le
leggi dell'urto vengono allora qualificate
come leggi che possono essere utilizzate per
lo scopo che Leibniz si proponeva, quello
di considerare tutta la dinamica come l'e-
stensione dei fenomeni di urto, pur di
concepire i moti aventi variazioni continue
di accelerazione come moti soggetti ad una
serie d'impulsi.
Cosicche quando nel 1695 Leibniz scri-
ve lo Specimen dynamicum[5], egli ha le
idee completamente chiare sull'urto. Pero
non le espone fino in fondo. Nella prima
parte egli pone le premesse: la sua polemica
con i cartesiani sulla forza viva e quindi su
che cosa si conservi; la sua polemica con
meccanicisti vari e in particolare con New-
ton, i quali per spiegare i fenomeni della
natura invocano cause occulte o l'interven-
to di Dio; col che giustamente Leibniz
sostiene che si entra in una spiegazione a
circolo vizioso. Nella seconda parte, rima-
sta inedita, egli segue un percorso argo-
mentativo sequenziale molto preciso e coe-
rente. Parte dal concetto di forza, inteso
194 A. Drago e G.A. La Sala
da lui come energia; essa e l'unica grandez-
zareale, nonlaquantita di moto, ne il moto:
infatti per Leibniz il motononesiste, perche
e la semplice giustapposizione di situazioni
istantanee; il moto considerato come feno-
menoconsiste inunamerarelazione; quindi
i moti sono relativi e le leggi dell'urto sono
indipendenti dalle velocita assolute, dipen-
dono solo dalle velocita relative dei corpi
urtanti; inparticolare, nonsi puo inbase ai
fenomeni osservati, cioe dai risultati dell'ur-
to, indovinare quali corpi possedevano pri-
madell'urtounmotoassolutoequali invece
erano in quiete. Quindi L'azione recipro-
ca... esercitata dai corpi l'uno sull'altro e
identica qualora sia identica la velocita del
loro avvicinarsi reciproco. Spiega poi la
costituzione dei corpi (no all'atomo duro
di Wallis e Newton); afferma che e l'elasti-
cita che puo dare la spiegazione dei fenome-
ni dell'urto. Passa poi a porre i fondamenti
matematici: la quiete e equivalente al moto
che si annulla, secondo il principio di conti-
nuita ; l'azione corporea non e mai senza
reazione, e l'azione e la reazione sono tra
loro uguali e contrarie; piu altre precisa-
zioni (non sempre felici, se viste moderna-
mente), tra le quali spicca l'ultima: il fatto
che i corpi partecipino di un moto comune
nonmutainnullaleloroazioni reciproche.
Ad essa seguono i famosi esperimenti sulla
toldadi unanaveeladiscussionedel perche i
corpi lanciati dalla Terra ne seguano il
moto. Comunque non enuncia le leggi del
moto; forse lo scritto e incompleto?
4. L'opera del 1698.
Nel secondo saggio Essay de dynami-
que sur les lois du mouvement del 1698 [6],
Leibniz non solo approfondisce il proble-
ma dell'urto, ma sviluppa con chiarezza le
leggi dell'urto, e sviluppa delle considera-
zioni che precorrono quanto in se guito
sara stabilito dai suoi successori.
La tabella I presenta una sintesi del
Essay de dynamique sur les lois du mouve-
ment; in questa tabella sono evidenziati
con un punto quelle proposizioni in cui
Leibniz affronta problemi di urto.
5. La traduzione italiana di quest'opera.
Nel se guito presentiamo la parte piu
rilevante del testo, laddove Leibniz stringe
tutti i discorsi dei paragrafi precedenti in
alcun formule e poi le commenta.
Abbiamo tradotto completamente que-
sta opera, non lunga, dal francese. Nel
tradurla abbiamo cercato di rendere com-
prensibile la lettura del testo di Leibniz a
chiunque abbia una cultura di scuola me-
dia superiore.
Sono stati numerati tra parentesi tonda
i possibili paragrafi di ogni opera (cos
come e stato suggerito dall'edizione spa-
gnola degli stessi testi [7]), in modo da
semplificare la lettura ed avere anche un
riferimento delle parti tagliate.
Leibniz alle volte scrive la parola di un
concetto fisico importante con la maiusco-
la e alle volte no, senza un ordine appa-
rente. Abbiamo deciso di non mantenere la
lettera maiuscola.
Abbiamo variato liberamente l'inter-
punzione di virgola, punto e virgola, due
punti e punto, per facilitare la lettura in
italiano. Inoltre, aparita di senso, lasingola
parola e stata tradotta con una parola piu
appropriata; quando il senso e stato modi-
ficato, allora si sono inserite delle precisa-
zioni tra parentesi quadre [ ]. Un'attenzio-
ne particolare e stata data alle notazioni
(incomprensibili al lettore di oggi), che sono
state modificate in senso moderno.
Inoltre talora e stato necessario intro-
durre qualche piccola aggiunta, per rende-
re possibile la comprensione del testo a un
lettore moderno; in questi casi si e fatto uso
delle parentesi quadre [ ].
La dinamica dell'urto in Leibniz 195
Quando Leibniz discute su un concetto
fisico, lo si e chiamato, ogni volta che cio
facilitava la lettura ed il suo significato
moderno era chiaro, con la parola moder-
na; ad esempio, velocita rispettiva e sta-
ta tradotta con velocita relativa, forza
assoluta con energia cinetica, forza
morta con lavoro virtuale, azione mo-
trice con potenza.
Invece non abbiamo cambiato le parole
TABELLA I.
Sintesi del Saggio di dinamica sulle leggi del moto di
G. W. Leibniz
No. Proposizione
1 Definizione di quantita di moto; errata opinione dei cartesiani sulla conservazione della quantita di
moto.
2 Necessita di trovare qualche altra cosa che si conserva.
3 Conservazione della velocita relativa in un urto.
4 Conservazione della quantita di progresso [la moderna quantita di moto, considerata con il verso].
5
Conservazione della forza [energia cinetica]. Ambiguita del termine forza, che e stato inteso
come quantita di moto. Dalla confusione tra quantita di moto e forza e dipeso l'aver considerato la
conservazione della quantita di moto (senza verso).
6 Misura dell' energia mediante l' altezza alla quale il corpo puo salire. La sua differenza con la forza
morta [lavoro virtuale] e la sollecitazione [moto incipiente].
7 Discussione circa il ruolo di entrambe, la quantita di moto e l'energia, durante un urto di corpi con
eguale quantita di moto [limite errato di un urto anelastico con un urto elastico].
8 Cio che si conserva e la forza viva assoluta [energia cinetica ]. Se la forza viva potesse aumentare, si
avrebbe il moto perpetuo meccanico; se la forza viva potesse diminuire, dovrebbe diminuire sempre piu
e finirebbe del tutto; cosa che e contraria all'ordine delle cose. Quindi essa si conserva.
9 Tesi: In un urto l' Azione motrice [potenza] si conserva.
10 L'Azione motrice e definita come il prodotto della massa che si sposta per la lunghezza della
traslazione [diviso per l'unita di tempo].
11 Valutazione per mezzo dei tempi impiegati per eguali distanze.
12 Commenti sulla definizione.
13 Calcoli circa la definizione di velocita
14 Argomento per stabilire la conservazione dell'Azione motrice: se l'energia si conserva, anche l'Azione
motrice negli stessi tempi si conserva.
15-18 Calcolo in un caso specifico per dimostrare la conservazione della Azione motrice.
19 Commenti sulla Azione motrice.
20 Definizione delle grandezze di due corpi che si urtano.
21 L'equazione lineare: La conservazione della velocita relativa.
22 L'equazione piana: La conservazione della quantita di moto.
23 L'equazione solida: La conservazione dell'energia cinetica.
24 Derivazione matematica di ciascuna equazione dalle altre due equazioni.
25 Contro la nozione di Wallis e di Newton di corpo perfettamente duro, a causa della legge della
continuita , per la quale ogni cambiamento deve avvenire per passaggi insensibili e mai per salti.
26 Corpi elastici in pratica: corpi semielastici.
27 In questo caso la terza equazione non risulta vera. Conservazione dell'energia, inclusa l'energia di
deformazione e il calore.
196 A. Drago e G.A. La Sala
originarie nei casi in cui Leibniz discute del
significato di, ad esempio, forza e gli
attribuisce alternativamente il significato
cartesiano e il significato che gli da lui; in
tal caso la parola forza e posta tra
virgolette: oppure quando critica la quan-
tita di moto cartesiana, che, riferendosi
alla velocita in modulo, non e la quantita
di moto moderna; quest'ultimo concetto e
definito correttamente da Leibniz (che
pero lo chiama progresso). Alle volte,
per ricordare il testo originale, porremo tra
parentesi graffe { } le parole leibniziane che
indicano il concetto espresso con parole
moderne.
Le nostre scelte non sono in accordo
con tutti i commentatori precedenti; in
particolare, secondo noi essi hanno equi-
vocato il significato moderno di forza
morta e di azione motrice.
6. Il testo dell'opera del 1698 sull'urto.
(20) Ma forse ci si sorprendera da dove
si ricavi questo risultato [sulla conserva-
zione della potenza nell'urto]? (Perche non
manchera mai qualcuno che resti in dub-
bio, per quantocomplicato[dettagliato] sia
l'esempio che si scelga.) Lo si puo dimo-
strare a priori, indipendentemente dalle
note regole del moto; ed e cio che ho
dimostratovarie volte indifferenti maniere.
Ma qui faro vedere che quel risultato si
dimostra con le stesse leggi dell'urto che
l'esperienza ha gia giustificato e delle quali
[infatti] si puo dar ragione col metodo della
nave, cos come ha fatto il Signor Huy-
gens [8], e in molti altri modi; nonostante si
sia sempre obbligati a supporre qualcosa
che non e [di natura] matematica e che ha
origine in qualcosa di piu elevato. Tutta-
via, ridurro tutto a tre equazioni molto
semplici e belle, che contengono tutto cio
che riguarda l'urto centrale di due corpi su
una stessa retta.
Velocita cospiranti
del corpoa; prima dell'urto: v; dopo: v
0
;
del corpob; primadell'urto: V; dopo: V
0
.
Chiamo cospiranti [equiverse] queste
velocita, perche suppongo che tutte vadano
nel verso in cui va il centro di gravita
comune dei due corpi. Ma, se per caso
qualche velocita va invece in verso contra-
rio, allora la lettera che esprime la [sua]
velocita cospirante rappresenta un valore
negativo. Ma sempre si prendera come
corpo a un corpo la cui velocita e davvero
cospirante, ovvero che va nel verso del
centro di gravita prima dell'urto, e anzi in
modo che il corpo a segua e non preceda il
centro di gravita comune [in modo che le
altre velocita risultino il piu possibile posi-
tive]. In questo modo, il segno di v non
conta, ma possono variare i segni di v
0
,
V; V
0
. Ecco allora le nostre tre equazioni:
(21) I. Equazione lineare [9], che espri-
me la conservazione della causa dell'urto, o
della velocita relativa:
v V V
0
v
0
;
v V indica la velocita relativa tra i corpi,
con la quale essi si avvicinano prima del-
l'urto; e V
0
v
0
indica la velocita relativa
con la quale i due corpi si allontanano
dopo l'urto. E questa velocita relativa e
sempre la stessa prima e dopo l'urto, nella
ipotesi che i corpi siano del tutto elastici.
Questo e cio che dice questa equazione.
Bisogna solo notare che questa regola
generale raggruppera tutti i casi particola-
ri, anche se nella spiegazione di un caso
particolare i segni possono variare. Cos
accade anche nell'equazione successiva:
(22) II. Equazione piana, che esprime la
conservazione del progresso [quantita di
moto moderna] comune o totale dei due
corpi
mv MV mv
0
MV
0
:
Chiamo qui progresso la quantita di
La dinamica dell'urto in Leibniz 197
moto [cartesiana] che [pero ha un verso,
cioe ] va verso la direzione del centro di
gravita ; di modo che se, per esempio, il
corpo b prima dell'urto andasse nel verso
contrario, e quindi la velocita cospirante
fosse negativa, o fosse espressa da 7|V|,
indicando con |V| il modulo, ovvero cio che
vi e di positivo in V, allora il progresso di a
sarebbe mv, mentre il progresso di b sareb-
be 7M|V|. Eil progresso totale sara mv
MjVj; che [in effetti] e la differenza delle
quantita di moto [cartesiane] dei due corpi.
Se i due corpi a e b vanno nello stesso verso
prima e dopo l'urto, queste lettere v, V, v
0
,
V
0
non indicano altro che velocita vera-
mente cospiranti o positive; e, di conse-
guenza, in questo caso questa equazione fa
vedere che si avra la stessa quantita di
moto [cartesiana, cioe calcolata con i valori
assoluti delle velocita ] prima e dopo l'urto.
Ma, se i corpi a e b andassero in verso
contrario prima dell'urto e nello stesso
senso dopo l'urto, la differenza della quan-
tita di moto prima dell'urto sarebbe uguale
alla somma delle quantita di moto dopo
l'urto. E ci saranno altre variazioni simili a
seconda della variazione dei segni delle
lettere V, v
0
, V
0
[10].
(23) III. Equazione solida, che esprime
la conservazione dell'energia totale assolu-
ta (o anche della potenza [se l'energia e
intesa nell'unita di tempo]):
mvv MVV mv
0
v
0
MV
0
V
0
:
Questa equazione ha di eccellente che
scompaiono tutte le variazioni dei segni,
che risultavano dai differenti versi delle
velocita v, v
0
, V, V
0
; perche qui tutte le
lettere che esprimono queste velocita sono
elevate al quadrato. Ora, 7V e +V hanno
lo stesso quadrato +VV; quindi tutte le
differenti direzioni non cambiano nulla.
Ed e percio che questa equazione da qual-
cosa di assoluto, indipendentemente dalle
velocita relative o dai progressi [dalle
quantita di moto moderne] verso un deter-
minato lato. Qui, si tratta soltanto di
valutare le masse e le velocita , senza pre-
occuparsi del verso in cui vanno queste
velocita . Ed e cio che soddisfa allo stesso
tempo il rigore dei matematici e il desiderio
dei filosofi, [come pure] gli esperimenti e le
ragioni ricavate da diversi princ pi.
(24) Sebbene abbia messo assieme, per
bellezza ed armonia, tutte e tre le equazio-
ni, tuttavia due di esse potrebbero basta-
re [11]. Perche , prendendo due qualunque
di queste equazioni, se ne puo ricavare
quella che manca. Cos , la prima e la
seconda danno la terza in questo modo.
Con la prima si avra v v
0
V
0
V; con
la seconda si avra mv v
0
MV
0
V;
e moltiplicando membro a membro un'e-
quazione con l'altra, si otterra
mv v
0
v v
0
MV V
0
V V
0
;
il che da mvv v
0
v
0
MVV V
0
V
0
,
cioe la terza equazione. Ugualmente la
prima e la terza danno la seconda, perche
mvv v
0
v
0
MVV V
0
V
0
, che e la
terza, divisa membro a membro per la
prima equazione v v
0
V
0
V, dara
mvv v
0
v
0
=v v
0
MVV V
0
V
0
=V
0
V;
da cui mv v
0
MV
0
V, cioe la
seconda equazione. Infine, la seconda e la
terza equazione danno la prima. Perche la
terza mvv v
0
v
0
MVV V
0
V
0
, di-
visa per la seconda, cioe per
mv v
0
MV V, da
mvv v
0
v
0
=mv v
0
MVV V
0
V
0
=MV
0
V;
che da v v
0
V
0
V, giusto la prima
equazione.
(25) Aggiungero soltanto un'osserva-
zione, e cioe che molti distinguono tra
corpi duri [cos duri da non cambiare
forma nell'urto; e quindi che non permet-
tono la conservazione dell'energia] e corpi
198 A. Drago e G.A. La Sala
molli, e ancora distinguono quelli duri in
elastici e non elastici; e per ogni tipo di
corpo costruiscono differenti leggi [12]. In-
vece si puo pensare che in natura i corpi
sono duri-elastici [o meglio, piu o meno
elastici], ma comunque [anche se non sono
del tutto elastici] senza escludere che sem-
pre l'elasticita deve provenire da un fluido
piu sottile e penetrante, il cui movimento e
perturbato dalla tensione o dal cambia-
mento dell'elasticita . E giacche a sua volta
questo fluido deve essere formato di cor-
puscoli solidi, elastici tra loro, si vede che
questa Replicazione di Solidi e Fluidi pro-
segue all'infinito. Orbene, la Natura ha
bisogno di questa elasticita dei corpi per
ottenere l'esecuzione delle grandi e belle
leggi che il suo Autore, infinitamente sag-
gio, ha progettato; tra le quali non sono di
minore importanza quelle due leggi della
Natura, che per primo ho fatto conoscere;
delle quali la prima e la legge della conser-
vazione della energia assoluta, o della po-
tenza nell'universo (con alcune altre nuove
conservazioni assolute che dipendono da
quella e che un giorno spieghero ); e la
seconda e la legge della continuita, in virtu
della quale, tra altri effetti, ogni cambia-
mento deve avvenire per passaggi insensi-
bili e mai per salti. Cio fa s che la natura
non ammetta corpi duri anelastici. Per
dimostrare questo, supponiamo che una
sfera dura [e quindi] non elastica urti una
sfera simile in quiete; dopo l'urto bisogna o
che ambedue le sfere siano ferme, nel qual
caso sarebbe violata la legge di conserva-
zione dell'energia; o che vi sia movimento e
che ne riceve [abbia ricevuto] la sfera che
stava in riposo, perche essa non puo essere
considerata infrangibile [in realta , fissa]; e
quand'anche la si supponesse cos , occor-
rebbe che la sfera urtante (per conservare
l'energia) rimbalzasse di colpo all'indietro.
Il che e un cambiamento proibito, giacche
ci sarebbe un salto; poiche un corpo, che e
diretto in un certo verso, deve diminuire il
suo moto fino [a giungere] al riposo, prima
di cominciare ad andare all'indietro, prima
poco poi sempre di piu . Ma [anche] la sfera
urtata, che deve ricevere il movimento,
cambierebbe con un salto; se [e vero che]
la sfera urtata deve ricevere tutto d'un
colpo un certo grado [finito] di velocita ,
ed essa [per il suo essere dura] non ha il
modo di riceverlo a poco a poco e per
gradi. Allora e chiaro che occorre: o che
la sfera che urta passi di colpo al riposo, il
che sarebbe gia [un errore, perche richiede]
un cambiamento per salti; oppure che, se
questa sfera urtante mantiene una certa
velocita , la sfera urtata, che era in riposo,
ne riceva di colpo una sua parte; la quale
parte non puo essere minore di quella persa
dalla sfera che urta, giacche [qui segue una
deduzione errata di Leibniz] quella urtata
deve o fermare quella che urta, o andare
davanti ad essa. Percio , la sfera che urta
passerebbe di colpo dalla velocita al ripo-
so, o per lo meno l'urtata passerebbe tutto
ad un tratto dal riposo a un certo grado di
velocita , senza passare per i gradi interme-
di; il che e contrario alla legge della conti-
nuita , la quale in natura non ammette
nassun cambiamento per salti. Benche io
abbia molte altre argomentazioni che con-
cordano nell'escludere i corpi duri non
elastici, non e questo il luogo per dilungarsi
ulteriormente.
(26) Tuttavia, bisogna ammettere che,
sebbene i corpi debbano essere elastici in
natura, nel senso che ho appena spiegato,
cio nonostante l'elasticita spesso non ap-
pare un granche nelle masse o corpi che
utilizziamo, anche quando queste masse
sono formate da parti elastiche e assomi-
gliano ad un sacco pieno di palline dure,
che cedono anche ad un urto modesto,
senza ristabilire la forma del sacco, cos
come si vede che fanno i corpi molli o quei
corpi che cedono senza recuperare abba-
La dinamica dell'urto in Leibniz 199
stanza [la forma iniziale]. E
che le loro parti
non sono abbastanza collegate tra loro da
trasferire i loro cambiamenti al complesso.
Da cio deriva che durante l'urto di tali
corpi una parte dell'energia e assorbita
dalle particelle che compongono la massa,
senza che questa energia sia restituita al
complesso; e questo deve accadere sempre
quando la massa compressa non recupera
perfettamente [la forma iniziale]. [Questo
vale] anche se spesso accade che una massa
si dimostra piu o meno elastica a seconda
della differente modalita dell'urto; lo di-
mostra anche l'acqua, la quale cede ad una
pressione modesta eppure fa rimbalzare
una palla di [sparata da un] cannone.
(27) Orbene, quando le parti dei corpi
assorbono totalmente l'energia dell'urto
(proprio come quando si urtano due pezzi
di terra grassa o di argilla), o in parte (come
quando si scontrano due palle di legno, che
sono molto meno elastiche che due sfere di
marmo o di acciaio temperato); quando,
dico, una certa energia e assorbita dalle
parti, c'e un'altrettanta perdita di energia
assoluta [cioe in modulo] e di velocita
relativa; cioe , nelle equazioni prima e terza;
le quali non sono piu vere, giacche cio che
resta dopo l'urto e diventato minore di cio
che c'era prima dell'urto, a causa di quella
parte dell'energia che e stata stornata al-
trove [13]. Ma cio non riguarda affatto la
quantita di progresso, ovvero la seconda
equazione. E inoltre si mantiene solo que-
sto progresso [quantita di moto moderna]
totale quando, dopo l'urto, i due corpi
vanno assieme avendo la [stessa] velocita
del loro centro comune, cos come fanno
due palle di terra grassa o argilla. Ma per
quelle semielastiche (come due palle di
legno) accade in piu che dopo l'urto i corpi
si allontanano tra loro, anche se con una
diminuzione della prima equazione, a se-
conda di quella energia che nell'urto non e
stata [da loro] assorbita. E, sulla base di
esperimenti sul grado di elasticita di questo
tipo di legno, si potrebbe prevedere cio che
dovrebbe accadere a due palle di questo
materiale in qualsiasi tipo di scontri o urti.
Tuttavia, questa perdita dell'energia tota-
le, o questo difetto della terza equazione,
non deroga affatto alla verita inviolabile
della legge della conservazione della mede-
sima energia nel mondo. Perche cio che e
assorbito dalle particelle non e affatto
perduto nell'universo, benche lo sia per
l'energia totale dei corpi concorrenti.
7. Commento al testo.
Per quanto la lettura diretta del testo si
presenti chiara, tuttavia riteniamo che un
commento ulteriore possa aiutare il lettore
a cogliere piu rapidamente il significato del
testo e possa facilitare la ricostruzione
della dinamica dell'urto di Leibniz. Pertan-
to nel commento seguente sono riprese
quelle proposizioni, evidenziate con un
punto nella tabella di sintesi, nelle quali
Leibniz affronta problemi di urto.
Nella proposizione n. 1, viene data la
definizione di quantita di moto e viene
espressa la sua conservazione nell'urto;
inoltre, e evidenziata l'errata opinione dei
cartesiani sulla conservazione della quan-
tita di moto, definita come grandezza as-
soluta, questione molto dibattuta a quei
tempi.
Anche la velocita relativa dei corpi che
urtano si conserva (proposizione n. 3),
concetto che sara ripreso piu avanti (pro-
posizione n. 21) con maggiore chiarezza e
completezza.
Nella proposizione n. 7 Leibniz consi-
dera due corpi A e B aventi:
Corpo Massa Velocita
Quantita
di moto
Energia
cinetica
A m
A
3 v
A
2 q
A
6 Ec
A
12
B m
B
2 v
B
3 q
B
6 Ec
B
18
200 A. Drago e G.A. La Sala
Due corpi siffatti, urtandosi, possono
bloccarsi reciprocamente, cioe dopo l'urto
le velocita dei due corpi A e B sono nulle. In
effetti Leibniz descrive un urto totalmente
anelasticoede inerrorequandopensaquesto
urto, incui i due corpi si bloccanoreciproca-
mente, comeelastico(epertantoloconsidera
mediante una diminuzione continua della
quantita di moto, per cambiamenti insensi-
bili, secondoquantita di motoinfinitamen-
te piccole, ma continuamente ripetute).
Ma egli afferma che cio che si conserva
(proposizione n. 8) e la forza viva assoluta
(energia cinetica): se potesse aumentare, si
avrebbe il moto perpetuo meccanico, che e
impossibile; se la forza viva potesse dimi-
nuire, alla fine, diminuendo sempre piu ,
finirebbe del tutto, cosa che e contraria
all'ordine delle cose; quindi, non potendo
ne aumentare, ne diminuire, la forza viva si
conserva. In tal modo, se nell'urto non
viene assorbita energia dai corpi, come
avviene per i corpi non elastici, i corpi
possono, prima e dopo l'urto, sollevare
un medesimo peso alla medesima altezza,
cioe conservano l'energia. Inoltre (propo-
sizione n. 9), in un urto anche l'azione
motrice, cioe la potenza, si conserva.
Le affermazioni piu interessanti sono
contenute nella seconda parte (proposizioni
dal n. 20 al n. 27) che abbiamoriportato; qui
Leibniz si esprime dicendo: Ridurro tuttoa
tre equazioni moltosemplici e belle, che con-
tengonotuttocio cheriguardal'urtocentrale
di due corpi su una stessa retta. Notiamo
che adesso precisa che l'urto e centrale.
Definisce chiaramente le velocita co-
spiranti, cioe le velocita concordi, prese
col segno positivo o negativo a seconda del
verso in cui vanno i due corpi che si urtano:
Corpo Prima dell'urto Dopo l'urto
a v v
0
b V V
0
Passa, poi, a scrivere ed analizzare le
seguenti tre equazioni:
1. L'equazione lineare esprime, nel-
l'ipotesi che i corpi siano del tutto elastici,
la conservazione della velocita relativa:
v V V
0
v
0
, ove v V velocita re-
lativa prima dell'urto;
V
0
v
0
=velocita relativa dopo l'urto.
In questa equazione e evidente il supe-
ramento di quanto Leibniz ha gia espresso
nell' Essay de dynamique (nota alla pro-
posizione n. 9) sulla velocita relativa, ove
valeva l'ipotesi che le velocita sono tutte
nello stesso senso.
2. L'equazione piana esprime la con-
servazione del Progresso comune (cioe
della quantita di moto intesa come vetto-
re), contrariamente, come gia detto sopra,
all'opinione dei cartesiani:
mv MV mv
0
MV
0
;
in cui, si sottolinea, le velocita sono prese
con il loro segno positivo o negativo, a
seconda dei versi che hanno prima o dopo
l'urto.
3. L'equazione solida esprime la con-
servazione dell'Energia totale o assoluta o
dell'Azione motrice:
mvv MVV mv
0
v
0
MV
0
V
0
;
in cui scompaiono tutte le variazioni dei
segni, essendo le velocita elevate al qua-
drato. Questa equazione soddisfa allo
stesso tempo il rigore dei matematici e il
desiderio dei filosofi, gli esperimenti e le
ragioni ricavate da diversi princ pi.
In effetti la terza, nella forma
mv
2
mv
0 2
MV
2
MV
0 2
;
e il prodotto delle altre due: quindi e facile,
come fa Leibniz, derivare matematicamen-
te ciascuna equazione dalle altre due (pro-
La dinamica dell'urto in Leibniz 201
posizione n. 24). Leibniz poi ricorda (pro-
posizione n. 25) la distinzione, sostenuta da
molti (Wallis, Newton), dei corpi in
duri
elastici
non elastici
n
molli.
E aggiunge per ogni tipo di corpo
[loro] costruiscono differenti leggi. Leib-
niz ritiene, invece, che in natura i corpi
sono duri-elastici (in essi l'elasticita deve
provenire da un fluido sottile e penetrante
formato a sua volta di corpuscoli solidi
elastici tra loro; nei corpi, cioe , avviene
una sorta di replicazione di solidi e fluidi
che prosegue all'infinito). Leibniz ag-
giunge che la natura ha bisogno di que-
sta elasticita dei corpi per ottenere l'ese-
cuzione delle grandi e belle leggi che il suo
Autore, infinitamente saggio, ha proget-
tato e cioe :
la legge di conservazione dell'energia asso-
luta,
la legge della continuita , per la quale ogni
cambiamento deve avvenire per passaggi
insensibili e mai per salti.
Ad esempio, Leibniz considera due
sfere dure anelastiche A e B, delle quali
prima dell'urto A e in moto e B e ferma.
Dopo l'urto possono verificarsi alcune
situazioni, ad esempio:
entrambe ferme, dal che consegue la vio-
lazione della conservazione dell'energia;
B in moto e A fissa, situazione che com-
porta la violazione della legge della conti-
nuita ;
B fissa e A rimbalza indietro, situazione
che viola la legge della continuita .
Attraverso questi ragionamenti Leib-
niz arriva alla conclusione di dover esclu-
dere i corpi duri non elastici, dato che la
natura non ammette nessun cambiamento
per salti come dice la legge della conti-
nuita .
Quindi i corpi sono semielastici (pro-
posizione n. 26); sebbene in natura essi
dovrebbero essere elastici, l'elasticita non
sempre appare.
I corpi assomigliano ad un sacco pie-
no di palline dure, che cedono anche ad un
urto modesto, senza ristabilire la forma del
sacco, come fanno i corpi molli. Nell'urto
una parte dell'energia viene assorbita dalle
particelle che compongono la massa, senza
che questa energia sia restituita al com-
plesso. Significativa e l'analogia con l'ac-
qua che cede ad una pressione modesta
eppure fa rimbalzare una palla di canno-
ne.
Nello schema seguente abbiamo cerca-
to di sintetizzare i fenomeni di urto secon-
do Leibniz:
Corpi che urtano Tipo di urto Cosa accade Conseguenze Considerazioni
sulle eq. 1, 2, 3
Due pezzi di argilla Anelastico Assorbimento
totale dell'ener-
gia dai corpi
Perdita totale di
energia assoluta
e di velocita re-
lativa
eq. 1 non vera
eq. 3 vera
Due palle di legno Semielastico Assorbimento par-
ziale dell'energia
dai corpi
Allontanamento re-
ciproco dei corpi
Perdita parziale di
energia assoluta as-
soluta e di velocita
eq. 1 non vera
eq. 3 non vera
202 A. Drago e G.A. La Sala
E
possibile osservare che nell'urto di
due pezzi di argilla (urto anelastico) o di
due palle di legno (urto semielastico) co-
munque c'e perdita di energia assoluta
(energia cinetica).
Le ultime frasi del testo sono molto
chiare. Con le sue parole Leibniz illustra la
conservazione nondell'energiacinetica, ma
dell'energia in generale (contrariamente a
quanto afferma Westfall [14]), precorrendo
quanto venne stabilito, piu tardi, nel 1850
circa e rivelando profondita di pensiero e
modernita nei ragionamenti. E
evidente che
Leibnizragiona, siapureintermini intuitivi,
per trovare invarianti al gruppo di trasfor-
mazioni piu generale possibile.
8. Note conclusive.
Westfall, che pure non nasconde le sue
simpatie per Newton e riporta Leibniz
come un metafisico che compie quasi un
vaneggiamento tra metafisica e fisica,
riconosce pienamente a Leibniz il merito
di aver enunciato le leggi dell'urto. L'a-
nalisi che fa delle regole [di Cartesio] in
base al principio di continuita resta a
tutt'oggi una delle stroncature piu nette
che tutta la storia della scienza cono-
sca [14] (p. 362). Sostiene che, a parte
questa infelice prima mossa [l'introduzio-
ne dell'azione motrice], l'analisi dell'urto
di Leibniz rimane un capolavoro di pre-
cisione scientifica. Mentre il suo fonda-
mento poggia nettamente su Huygens,
l'esposizione alza le conclusioni di Huy-
gens ad un piu alto livello di generalita e
di concisione (p. 367) [15].
Dopo queste valutazioni non com-
prendiamo perche ancora i libri di testo
di fisica non dichiarino le leggi dell'urto di
Leibniz, o almeno di Huygens-Leibniz,
preferendo lasciarle anonime, o anche
trascurarle proprio; col che si cancella
una parte importantissima della storia
della meccanica e anche della sua origine
concettuale e teorica.
Riferimenti bibliografici.
[1] DRAGO A. e LA SALA G. A., Introduzione
all'edizione critica del Saggio sulla dinamica di
Leibniz, in P. TUCCI (ed.): Atti del XVII Con-
gresso Nazionale Storia della Fisica e Astrono-
mia (Nani, Milano) 1997, p. 151-180; L'Essay
de Dynamique di Leibniz e la sua riforma della
meccanica, La Fisica nella Scuola, 31, Suppl.
(1998), 81-91. Si veda anche: La meccanica di
Leibniz ricostruita come coerente alternativa
alla meccanica di Newton, in P. TUCCI (ed.):
Atti XVI Convegno Nazionale Storia Fisica e
dell'Astronomia (Nani, Milano), 1996, p. 383-
402.
[2] LEIBNIZ G. W., Essay de Dynamique, Oeuvres
a cura di Foucher de Careil, vol. I, 1859, e anche
in COSTABEL P., Leibniz et la dynamique (Her-
mann, Paris),1960, p. 97-106.
[3] Questo epistolario e sintetizzato da DUGASR.: La
Mecanique au XVII Siecle (Griffon, Neucha tel),
1954, p. 500-504.
[4] E
sempre Dugas a sintetizzare questo scambio di
lettere: p. 498-500.
[5] LEIBNIZ G. W., Specimen Dynamicum, Acta
Eruditorum, 1695, 2
a
parte inedita pubblicata da
H.G. DOSCH et al. (Meiner, Hamburg) 1982.
[6] LEIBNIZ G.W., Essay de Dynamique sur les loix
du mouvement, Matematische Schriften, a cura
di C.J. Gerhardt, VI, p. 215-221.
[7] LEIBNIZ G.W., Ecritos de Dinamica, a cura di J.
ARANA CAN
EDO-ARGU
ELLE (Tecnos, Madrid)
1991; il libro comprende i tre scritti di Leibniz
che abbiamo menzionato.
[8] HUYGENS C., De Motu..., Oeuvres Completes,
XVI, p. 33 s.
[9] Questi nomi sono mutuati dal calcolo degli
indivisibili di B. Cavalieri.
[10] Nel par. 20 la dimostrazione della conservazione
della potenza aveva motivatol'introduzione delle
tre leggi dell'urto. Nel par. 9 Leibniz aveva
dichiarato quella conservazione piu vicina alla
quantita di moto cartesiana. Leibniz poi non
parla piu della dimostrazione annunciata. Se la
cerchiamo tra le tre leggi, la seconda e l'unica
legge che potrebbe essere intesa in questo senso;
in effetti mgv e vicina a mv ~: Ma ci sono due
differenze essenziali: 1) un'accelerazione (g),
quindi un cambiamento di dimensioni fisiche
tra le due grandezze che le rende completamente
differenti; 2) la seconda grandezza e vettoriale e
Leibniz lo sottolinea bene. Forse nel corso del-
l'esposizione Leibniz si e accorto delle differenze
e senza rinunciare a introdurre le tre equazioni
semplici e belle (par. 20) ha rinunciato a esporre
una dimostrazione che non c'era piu .
[11] Ci sono due incognite in tre equazioni; la terza
si ottiene per prodotto delle prime due, cos
come indichera Leibniz tra poco; e chiaro allora
che ne bastano due, la terza dipendendo dalle
altre.
[12] WALLIS J., Mechanica sive de Motu (Londra)
La dinamica dell'urto in Leibniz 203
1669-71, aveva introdotto questa idea di corpo
perfettamente duro; essa e stata segu ta poi da
Newton, con cui polemizza Leibniz.
[13] Si noti che qui Leibniz illustra la conservazione
non dell'energia cinetica, ma dell'energia in ge-
nerale, precorrendo quanto venne stabilito nel
1850 circa.
[14] WESTFALL R. S., Newton e la dinamica del XVII
secolo (Il Mulino, Bologna) 1982, p. 369-370.
[15] Il curatore dell'edizione spagnola degli ultimi
scritti di dinamica di Leibniz, Arana, non prende
posizione, benche dedichi una lunga parte della
nota introduttiva al problema dell'urto (p.
XXIV-XXVIII).
204 A. Drago e G.A. La Sala
Introduzione.
La recente discussione tra Selleri, Ber-
gia e Valleriani ospitata su questa rivi-
sta [1] tocca un problema di fondo che
puo essere cos espresso: come ci si deve
porre di fronte alla constatazione che il
formulario della fisica contemporanea
propone mondi controintuitivi, lontani
dal senso comune e difficilmente immagi-
nabili a partire dal mondo percettivo di cui
si fa comunemente e quotidianamente
esperienza?
E
un problema spinoso perche e legato
a domande radicali sulla natura della
conoscenza scientifica e sul suo significato
ontologico. Ed e un problema che l'attuale
comunita dei fisici ha per lo piu delegato ai
filosofi come problema non prettamente
fisico oppure ha considerato come margi-
nale rispetto ai problemi della ricerca di
punta. D'altra parte non si puo non rico-
noscere che la scelta oculata delle domande
alle quali rivolgere tutti, o quasi, gli sforzi
scientifici e alla base del progresso della
fisica degli ultimi 40 anni. E in un contesto
in cui progresso scientifico e sinonimo di
efficienza produttiva e di risultati immedia-
ti e sicuri, il fermarsi a riflettere sul signifi-
cato ontologico delle teorie elaborate puo
apparire come una pratica per lo piu ozio-
sa. Forse e anche per questo che dopo un
secolo dalla formulazione della relativita
ristretta si sta ancora discutendo sul suo
significato e non si e ancora deciso se
accettare il mondo che essa propone o, al
contrario, accontentarsi della sua indiscu-
tibile efficacia nel campo delle particelle
elementari. Comunque sia, come denuncia-
no Bergia e Valleriani, il risultato e che un
mondo in cui esiste una velocita limite e
invariante dei segnali luminosi appare a
molti fisici ancora oggi come straordinario,
assurdo, ben lontano dall'essere assorbi-
to dall'abitudine.
Il presente contributo si propone di:
presentare una lettura storica di come il
problema della necessita di modificare
l'ontologia in se guito alla formulazione
della relativita ristretta fu sollevato da
Minkowski all'inizio del secolo e affronta-
to a partire da una visione sostanzialista
dello spaziotempo;
tracciare le prospettive dalle quali Ein-
stein e Poincare hanno rifiutatola proposta
di Minkowski, proponendo ontologie an-
corate a concezioni relazioniste di spazio;
evidenziare che esistono aspetti ancora
attuali del dibattito storico;
argomentare perche riflessioni sull'in-
terpretazione ontologica delle teorie sono
importanti per l'insegnamento della fisica.
1. Minkowski e la ricerca di una nuova
ontologia per la relativita ristretta.
Secondo l'opinione piu diffusa, il con-
tributo scientifico di Minkowski sarebbe
Relativita ristretta e concezioni di spazio.
O. Levrini
Dipartimento di Fisica dell'Universita - Bologna
GIORNALE DI FISICA Ottobre-Dicembre 1999 VOL. XL, N. 4
stato quello di fornire una traduzione in
forma geometrica della stretta interdipen-
denza fra spazio e tempo gia sancita dalle
trasformazioni di Lorentz. Sarebbe tale
interdipendenza ad aver suggerito come
naturale l'idea di una rappresentazione
degli eventi fisici in uno spazio quadridi-
mensionale. Questa visione non e storica-
mente precisa per almeno due motivi. Il
primo e che Minkowski non e il vero
inventore dello spaziotempo, perche nel
presentare la sua visione geometrica qua-
dridimensionale riprendeva e sviluppava
un'idea proposta per la prima volta da
Poincare in contributi del 1905-1906, nei
quali la geometria spaziotemporale viene
definita contestualmente al riconoscimen-
to delle trasformazioni di Lorentz come
gruppo di simmetria [2]. Il secondo motivo
e che tale visione attribuisce allo spazio-
tempo il ruolo di puro strumento formale
utile per rappresentare graficamente e,
dunque, per visualizzare concetti quali la
relativita della simultaneita e gli effetti
cinematici di contrazione delle lunghezze
e dilatazione dei tempi. Questa visione
dello spaziotempo non e quella proposta
originariamente ne da Minkowski ne da
Poincare ma e alla base della scelta operata
da molti autori di libri di testo (sia a livello
universitario sia a livello di scuola secon-
daria superiore) di presentare la geometria
spaziotemporale come un capitolo quasi
marginale. D'altra parte lo spaziotempo
cos interpretato non aggiunge nulla al
contenuto fisico della relativita ristretta,
dal momento che tutti i concetti di cui
propone una visualizzazione grafica sono
concetti deducibili algebricamente dalle
trasformazioni di Lorentz.
Che il significato originale attribuito da
Minkowski alla geometria dello spazio-
tempo sia di tutt'altra portata culturale
emerge dal testo della conferenza dal titolo
Raum und Zeit tenuta a Colonia nel
1908 (pubblicata nel 1909) [3]. Questa con-
ferenza rappresenta un'emblematica occa-
sione in cui un esponente importante della
comunita scientifica pone all'attenzione
dei colleghi la necessita di un cambiamento
di ontologia imposto da un formulario
nuovo e intrinsecamente rivoluzionario,
direbbe Kuhn [4]. Riletto oggi, il testo di
questa conferenza colpisce, oltre che per i
suoi contenuti, anche per la retorica chia-
ramente mirata ad invitare fisici e matema-
tici a riflettere sulle conseguenze ontologi-
che della relativita ristretta e sulla necessita
di un riadattamento dell'abitudine e della
percezione.
Prima di proporre un'analisi critica
dell'interpretazione minkowskiana, riper-
corriamo le principali tappe del suo ragio-
namento per riuscire a capire cosa Min-
kowski intendesse dire con la tanto celebre
quanto ermetica frase pronunciata in
apertura di conferenza: I punti di vista
su spazio e tempo [...] germogliano nel
terreno della fisica sperimentale, e in que-
sto risiede la loro forza. Si tratta di conce-
zioni drastiche. D'ora innanzi, lo spazio in
se stesso, e il tempo in se stesso, sono
condannati a svanire come pure ombre, e
solo una sorta di unione tra i due conser-
vera una realta indipendente [5].
Uno sguardo al testo della conferenza di
Minkowski Raum und Zeit (Colonia,
1908).
Obiettivo generale della relazione di
Minkowski e mostrare come, a partire
dalla meccanica accreditata al giorno d'og-
gi, si possa arrivare, lungo una linea di
pensiero puramente matematica, a nuove
idee di spazio e tempo.
Il problema centrale affrontato e quello
di risolvere la disomogeneita esistente tra i
due gruppi di trasformazioni che conserva-
no la forma delle equazioni differenziali
della meccanica classica: il gruppo delle
206 O. Levrini
rotazioni spaziali e quello delle trasforma-
zioni di Galilei. Minkowski legge in questi
due gruppi di trasformazioni profonde
differenze in quanto:
nel primo gruppo vede espresse le proprie-
ta di omogeneita ed isotropia dello spazio,
proprieta a cui viene attribuito significato
geometrico;
nel secondo gruppo vede espresse le carat-
teristiche del tempo classico (l'esistenza del
tempo assoluto e la liberta del tempo di
assumere una qualunque direzione rispetto
agli assi spaziali), nonche l'assunto fisico
che non esista alcun fenomeno che ci
permetta di distinguere tra sistemi di rife-
rimento inerziali.
La geometria quadridimensionale vie-
ne dunque riletta da Minkowski come la
strada per risolvere le disomogeneita pre-
senti nella fisica classica. Tant'e che obiet-
tivo specifico dello studio di Minkowski
diventa quello di riuscire a rileggere il
gruppo di Lorentz come gruppo di trasfor-
mazioni piu generale del quale i due gruppi
di simmetria della meccanica classica risul-
tino casi particolari. In questo modo la
struttura formale puo ritrovare unitarieta
e organicita , grazie alle quali sara possibile
capire cosa ha a che fare la richiesta di
ortogonalita nello spazio, ovvero la ri-
chiesta d'invarianza delle leggi fisiche per
trasformazioni omogenee lineari che lasci-
no invariata l'espressione x
2
y
2
z
2
, ri-
chiesta espressa dal primo gruppo, con la
perfetta liberta dell'asse temporale di
assumere una qualunque direzione rispetto
agli assi spaziali, proprieta implicata dal
secondo gruppo.
Per connettere concretamente i due
gruppi di trasformazione, Minkowski con-
sidera nel piano x; t l'invariante rappresen-
tato dall'equazione c
2
t
2
x
2
1, dove c e
un parametro al quale non viene attribuito
all'inizio alcun particolare significato. Co-
me passo successivo viene costruito in
modo totalmente geometrico un nuovo
sistema di coordinate x
0
; t
0
nel quale l'e-
spressione scritta rimane invariante in for-
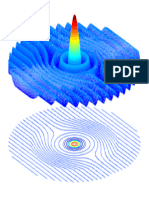
ma (cfr. fig. 1).
Attraverso passaggi dal carattere appa-
rentemente artificioso arriva alla conclu-
sione che la richiesta d'invarianza dell'iper-
bole porta in realta ad individuare, per
ogni valore di c, un ben definito gruppo
di trasformazioni lineari. Tale gruppo vie-
ne indicato con G
c
, ad evidenziare la di-
pendenza dal parametro usato. Dando a c
il significato di velocita della luce e facendo
tendere c all'infinito e possibile ritrovare il
gruppo classico di trasformazioni il
gruppo di Galileo da Minkowski indi-
cato con G
1
.
La geometria quadridimensionale in-
variante per il gruppo G
c
di trasformazioni
diventa espressione di diverse esigenze che,
nel loro insieme, concorrono a porre le basi
per quella che sara l'interpretazione onto-
logica della relativita ristretta proposta da
Minkowski, riconducibile ad una visione
sostanzialista dello spaziotempo. Oltre a
rispondere all'esigenza, gia ricordata, di
ricostruire una struttura formale sufficien-
temente generale da assorbire in se le diso-
mogeneita particolari, essa diventa anche
Fig. 1. Il diagramma illustra la costruzione degli assi
t
0
e x
0
operata da Minkowski con l'utilizzo dell'iper-
bole oggi nota come curva di calibrazione (Min-
kowski, 1909).
Relativita ristretta e concezioni di spazio 207
espressione di una ritrovata armonia tra
fisica e geometria, nonche della possibilita
di rinsaldare le teorie fisiche sull'idea che
l'essenza stessa del mondo deve essere
assoluta, cioe invariante, indipendente dal-
la visione necessariamente particolare de-
gli osservatori. Vediamo piu in dettaglio
questi due punti.
a) Il progetto di geometrizzare la fisica.
Minkowski pone molta attenzione a
persuadere pubblico (e lettori) della neces-
sita di una visione di un mondo quadridi-
mensionale, necessita che non deriva da
pure speculazioni formali, ma dal mondo
naturale, o meglio, germoglia dal terreno
della fisica sperimentale. Per questo invita
a visualizzare graficamente lo stato di
cose. Minkowski sottolinea, infatti, quan-
to ogni visualizzazione non avvenga nello
spazio, ma nello spazio e nel tempo, e
quanto questa sia un'operazione naturale,
dal momento che gli oggetti della nostra
percezione includono invariabilmente spa-
zi e tempi in combinazione: a nessuno
ca pita infatti di pensare un luogo al di
fuori di un tempo, o un tempo al di fuori di
un luogo.
Per esplicitare e ricordare che questo e
il modo naturale di percepire il mondo
fattuale, Minkowski chiama Weltpunkt
un punto dello spazio in un punto del
tempo. Il mondo [6] e semplicemente l'in-
sieme di tutti i possibili valori di x, y, z, t.
Quei punti del mondo che rappresentano
la corsa di un qualunque oggetto defini-
scono per quell'oggetto la cosiddetta Welt-
linie.
Il progetto di Minkowski di geometriz-
zare la fisica acquista cos naturale legitti-
mita , in quanto fonda le proprie radici nel
mondo dei fenomeni ed e di questo che
vuole dare spiegazione. Grazie alle sue
proprieta di simmetria, generalita e inva-
rianza [7], la geometria quadridimensiona-
le diventa il modo privilegiato di liberare la
conoscenza del mondo fattuale da quelle
imperfezioni che derivano dall'attacca-
mento, istintivo e non completamente ra-
zionale, al nostro modo approssimativo di
percepire e osservare la natura: le leggi
fisiche potranno trovare la loro espressione
perfetta come relazioni reciproche tra que-
ste Weltlinien [8].
Solo guardando il mondo dei fenomeni
da una visione quadridimensionale strut-
turata, dunque, si riescono a scrivere le
leggi fisiche nella forma piu semplice pos-
sibile. Nello spazio classico tridimensiona-
le esse, infatti, lasciano solo una compli-
cata proiezione, un'ombra. Lo spazio e
il tempo in se stessi sono infatti per Min-
kowski solo ombre, in tre o in una dimen-
sione, del mondo reale, ombre che il pen-
siero matematico ha permesso di far sva-
nire guidando la conoscenza a riconoscere
la vera essenza quadridimensionale della
realta .
b) L'invariante come essenza del mondo.
Se questo mondo geometrizzato, o que-
sto spaziotempo, e derivabile dalla totali-
ta dei fenomeni naturali, e anche vero che
per Minkowski, una volta dato, non e
piu in nessun modo determinato univoca-
mente dai fenomeni. L'essenza della teo-
ria diventa l'invarianza della struttura geo-
metrica per trasformazioni del gruppo G
c
e, per questo, il nome piu adatto per espri-
mere questo non e piu il postulato di
relativita , quanto il postulato del mondo
assoluto opostulatodel mondo. Questa
nuova struttura geometrica, dunque, e tale
da sopravvivere indipendentemente dai fe-
nomeni e dagli osservatori e, per questo,
puo essere riconosciuta come la struttura
propria del mondo intero all'interno della
quale ogni osservatore, in ogni luogo e in
ogni istante di tempo, si ritrova. La geome-
tria dello spaziotempo, infatti, si riproduce
208 O. Levrini
uguale a se stessa quando la si associa ad un
qualunque osservatore posto in un qualun-
que punto O del mondo: in ogni luogo si
riproducono le strutture invarianti dei due
coni di vertice O, rappresentati dall'equa-
zione c
2
t
2
x
2
y
2
z
2
0, le quali ovun-
que individuano due zone, cosiddette del
dopo e del prima di O, costituite da
quegli insiemi di punti che possono rispet-
tivamente ricevere o inviare luce a O.
Cio non esclude che si possa ancora
parlare di relativita , e di sistemi associati
ad osservatori che vedono i fenomeni dalla
loro particolare prospettiva, ma lo si puo
fare solo nel momento in cui si rinuncia a
vedere e a pensare il mondo a quattro
dimensioni, e ci si riferisce ad esso attra-
verso la sua proiezione tridimensionale
nello spazio e a quella unidimensionale
nel tempo. Solo tali proiezioni, infatti,
possono essere ancora assunte con un
certo grado di liberta , ovvero lasciano
spazio a letture dipendenti dal punto di
vista dell'osservatore e affette da distor-
sioni prospettiche (usando il linguaggio di
Boniolo e Dorato e ripreso da Bergia e
Valleriani) [9]. Per Minkowski, dunque, il
mondo di Einstein popolato di regoli e
orologi, dal momento che enfatizza gli
effetti relativistici di contrazione delle lun-
ghezze e di dilatazione del tempo, e un
mondo osservato da una prospettiva che
tradisce un attaccamento ad una visione
newtoniana, perche newtoniana e l'abitu-
dine a tenere separate le dimensioni spa-
ziali da quella temporale.
La visione sostanzialista di Minkowski.
Lo spaziotempo di Minkowski, per
quanto si e gia detto, non vuole essere
una rappresentazione grafica della relati-
vita ristretta di Einstein, ne tanto meno
una pura astrazione matematica. Va invece
letto come il risultato di un'interpretazione
ontologica del formulario della relativita
ristretta e, come tale, e espressione di una
visione globale e radicale di un intreccio
complesso tra fisica, geometria e mondo
naturale. In particolare la visione di Min-
kowski nasce dalla convinzione dell'esi-
stenza di una armonia pre-stabilita fra
matematica pura e fisica.
Riconoscere nelle trasformazioni di
Lorentz l'interdipendenza tra spazio e tem-
po e la possibilita di riunificarli in un'e-
spressione invariante non e sufficiente per
cogliere appieno i significati attribuiti da
Minkowski allo spaziotempo, significati
che sono sintetizzati nel commento intro-
duttivo gia citato e di cui ora possiamo
proporre un'interpretazione. In esso sono
espressi i tre concetti chiave da cui prende
forma la visione di Minkowski: lo spazio-
tempo deriva dal mondo dei fenomeni, e
reale ed e indipendente dall'osservatore.
Come si e cercato di mostrare, Min-
kowski vede la geometria quadridimensio-
nale come l'ente primario il mondo
al quale ricondurre la fisica e, con essa,
l'insieme dei fenomeni naturali. Asvelare il
vero mondo sono le stesse relazioni fisi-
che della natura, relazioni che solo in
quattro dimensioni rivelano la loro vera
essenza in tutta semplicita [10]. In questa
visione costruita postulando l'esistenza del
mondo, il comportamento dei punti di
sostanza (punti occupati da oggetti fisici e
non astratti punti geometrici) va letto in
termini di relazioni invarianti fra le linee
del mondo, perche e in tali relazioni che si
esplicitano le leggi fisiche. Il mondo di
Minkowski e quindi svelato nella sua es-
senza dai fenomeni e acquista significato
perche dei fenomeni e in grado di dare
ragione: in quest'ottica si deve leggere il
rifiuto di Minkowski di pensare al mon-
do come ad un vuoto primordiale (eine
gahnende Leere). Il suo mondo e estra-
neo ad una visione che gli conferisca con-
notazioni mitiche o metafisiche. Esso rap-
Relativita ristretta e concezioni di spazio 209
presenta la vera essenza della realta e, nella
sua veste quadridimensionale, si libera dal
relativismo dello spazio oltre che del tempo
e confina lo spazio tridimensionale al ruolo
che hanno le ombre nel mito platonico
della caverna.
Nella visione di Minkowski viene sta-
bilita un'identificazione letterale tra la
struttura spaziotemporale matematica e
la struttura del mondo naturale. In altre
parole, la posizione di Minkowski si basa
sull'assunto sostanzialista che il mondo
reale e una varieta quadridimensionale, la
quale esiste come oggetto dotato di realta.
In piu , tale struttura, in quanto letteral-
mente identificata con il mondo naturale,
non puo che essere invariante, indipendente
dall'osservatore e, per questo, assoluta.
A completamento della visione di Min-
kowski, occorre aggiungere che grazie alla
sua peculiarita di essere geometrica e,
quindi, razionale, la struttura intrinseca
del mondo assume forme riconoscibili e
comprensibili dall'uomo. Quindi, criteri
estetici quali simmetria, invarianza, gene-
ralita diventano criteri a disposizione dello
scienziato per valutare il grado di fedelta
della teoria al mondo dei fenomeni, perche
queste sono le proprieta delle forme attra-
verso le quali si manifesta, nel terreno
della fisica sperimentale, quell'armonia
tra matematica pura e natura [11] che,
essendo prestabilita, trascende la cono-
scenza.
2. Il rifiuto di Einstein del sostanzialismo e
l'ontologia relazionista.
L'interpretazione diffusa dello spazio-
tempo di Minkowski come puro strumento
di visualizzazione sembra riprendere alla
lettera la visione di Einstein come e espres-
sa, ad esempio, nell'esposizione divulgati-
va delle teorie relativistiche. Il fatto di
considerare il tempo come quarta dimen-
sione non rappresenta per Einstein una
novita , dal momento che si potrebbe par-
lare in termini di continuo quadridimen-
sionale anche nella fisica classica. Qui pero
il tempo aveva una funzione indipendente
in confronto alle coordinate spaziali. E
questa la ragione della nostra inveterata
abitudine di trattare il tempo come un
continuo indipendente. [...] E
stata la teo-
ria della relativita a suggerirci di conside-
rare l'``universo'' come avente quattro di-
mensioni, poiche secondo tale teoria il
tempo viene defraudato della sua indipen-
denza, come mostra la quarta equazione
della trasformazione di Lorentz [12].
Il riconoscimento, da parte di Einstein,
della necessita (e dei vantaggi) di trattare lo
spazio e il tempo come un tutt'uno, quale
emerge da queste parole, fu il risultato di
profonde meditazioni che nacquero conte-
stualmente alla scrittura della relativita
generale. Tant'e che, come dice Bergia,
nello scritto giovanile di Einstein sulla
relativita ristretta [13] spazio e tempo
viaggiano s su percorsi correlati, ma non
si propone alcuna forma di riunificazione
tra di essi [14]. Infatti sono ampiamente
documentate le riserve espresse da Einstein
nei confronti del lavoro di Minkowski
immediatamente dopo la sua presentazio-
ne [15]. In esso Einstein vedeva il riemer-
gere in fisica di uno spazio tanto assoluto
quanto lo era quello di Newton, contro il
quale il fisico tedesco si era scagliato e che
pensava di avere una volta per tutte espun-
to dalla fisica attraverso l'idea di ricondur-
re il significato dei concetti alle loro defi-
nizioni operative.
Soltanto contestualmente alla scrittura
della relativita generale, Einstein comincio
a rendersi conto dell'importanza di una
visione quadridimensionale e di quanto
l'approccio geometrico fosse di gran lunga
preferibile all'originaria scrittura algebrica
della relativita ristretta. E dopo mesi di
210 O. Levrini
duro lavoro sul formalismo tensoriale
arrivo ad affermare: l'animo mi si e riem-
pito di un grande rispetto per la matema-
tica, la parte piu sottile della quale avevo
finora considerato, nella mia dabbenaggi-
ne, un puro lusso [16].
Queste parole potrebbero essere inter-
pretate come i primi segni di quella che
alcuni, come Holton ad esempio, ritengo-
no una vera e propria svolta nel pensiero di
Einstein, che lo avrebbe portato dall'empi-
rismo giovanile ad una posizione di tipo
realista in eta piu matura [17]. Di certo esse
sono indicative del fatto che Einstein,
lavorando alla teoria della relativita gene-
rale, giunse a riconsiderare il ruolo della
matematica come strumento descrittivo
potente ed unificatore, sul quale basare
l'organizzazione del pensiero e costruire
la conoscenza sul mondo. In una lettera
scritta ad un amico nel 1938, egli stesso
dichiaro infatti di essere divenuto, a causa
del problema della gravitazione, un cre-
dente razionalista, cioe uno che cerca l'u-
nica fonte attendibile di verita nella sem-
plicita matematica [18].
L'influenza su Einstein dell'idea di
Minkowski il mondo che percepiamo e
soltanto un'ombra del mondo reale a quat-
tro dimensioni e evidente in una lettera
inviata da Einstein a Michele Besso nel
luglio 1952. In essa Einstein rimproverava
l'amico dicendo: tu non prendi sul serio le
quattro dimensioni della relativita , ma
consideri invece il presente come fosse la
sola realta . Cio che tu chiami ``mondo''
corrisponde, nella terminologia fisica, a
``sezioni spaziali'', alle quali la teoria della
relativita gia quella speciale nega
realta oggettiva [19]. Quelle sezioni spa-
ziali sono proprio le proiezioni di cui
parla Minkowski nel corso della sua con-
ferenza del 1908, sono cioe le ombre che il
pensiero matematico ha rivelato come per-
cezioni parziali della realta .
Negli anni che seguirono alla pubblica-
zione della relativita generale Einstein non
perse occasione per riconoscere in modo
esplicito il proprio debito nei confronti di
Minkowski, tuttavia non si puo dire che le
due posizioni circa l'ontologia della relati-
vita ristretta arrivarono a sovrapporsi in
modo stabile e deciso. Nonostante siano
documentate oscillazioni nel pensiero di
Einstein sulla natura dello spazio [20],
Einstein non perse mai una certa diffidenza
verso una visione dello spaziotempo rico-
noscibile come decisamente sostanzialista.
L'influenza di parte machiana di Einstein
non poteva infatti che renderlo diffidente
verso un qualsiasi assoluto che rievocasse
quella stessa mostruosita concettuale
contro cui Mach si era scagliato [21]. Ein-
stein riteneva che la fisica fosse il tentativo
di costruzione concettuale di un modello
del mondo reale e della sua struttura retta
da leggi [22]. Egli fu coerente con se stesso
nel continuare a considerare le teorie dei
modelli. Quello che cambio nel pensiero di
Einstein, anche in se guito al lavoro di
Minkowski, fu l'idea del modello, che si
defin sempre piu in termini di un modello
matematico in grado di codificare il livello
acquisito di comprensione di una realta che
esiste indipendentemente dall'osservatore.
In sintesi si puo dire che alla visione so-
stanzialista di Minkowski si sia affiancata
una piu prudente posizione realista di Ein-
stein: La sola giustificazione dei nostri
concetti e dei sistemi di concetti sta nel
fatto che essi servono a rappresentare il
complesso delle nostre esperienze; oltre a
cio essi non hanno nessuna legittimita . Son
convinto che i filosofi hanno avuto un'in-
fluenza dannosa sul progresso del pensiero
scientifico, trasportando certi concetti fon-
damentali dal dominio dell'empirismo, do-
ve essi erano sottoposti al nostro controllo,
alle altezze intangibili dell'a-priori [23].
La posizione di Einstein prende dunque
Relativita ristretta e concezioni di spazio 211
forma dall'assunto che la scienza si debba
occupare del mondo naturale elaborando
concetti, anche astratti e matematici, ma
pur sempre calati o calabili nel mondo
esperibile e non appartenenti a realta me-
tafisiche, all'Olimpo dell'a-priori. Secon-
do Einstein esiste un limite della conoscen-
za razionale a cui deve tendere l'impresa
scientifica, oltre alla quale si entra in un
mondo in cui si creano dogmi e tabu :
Perche mai e necessario trascinare giu
dalle sfere olimpiche di Platone i concetti
fondamentali del pensiero scientifico, e
svelare il loro lignaggio terrestre? Risposta:
allo scopo di liberare questi concetti dai
tabu loro annessi, e pervenire cos a una
maggiore liberta nella formazione dei con-
cetti. Costituisce il merito imperituro di D.
Hume e di E. Mach quello di avere, piu di
tutti gli altri, introdotto questa mentalita
critica [24].
Coerente con questa posizione episte-
mologica e la visione di spazio che Einstein
propone piu frequentemente nei suoi scrit-
ti, visione che puo essere riconosciuta come
di tipo relazionista [25]: lo spazio come
struttura di relazioni formali, costruita
dall'uomo per porre ordine, comprende-
re il mondo dei fenomeni naturali, dove
per comprendere s'intende la creazione
di un ordine tra le impressioni sensoriali,
frutto dei concetti generali, delle relazioni
fra questi concetti e delle relazioni tra i
concetti e l'esperienza sensoriale [26].
Anche quando Einstein si professava
un razionalista ed esprimeva il suo rispetto
per la matematica, il suo atteggiamento
nel parlare di relativita ristretta non si
allontano mai definitivamente da una pro-
spettiva neopositivista [27]. In particolare,
nel pensiero di Einstein rimase sempre
significativa la distinzione di stampo neo-
positivista tra termini osservativi e termini
teorici, il cui lignaggio terrestre e garan-
tito se e solo se esiste una regola di
corrispondenza, una definizione opera-
tiva. Coerentemente, l'ontologia propo-
sta per la relativita ristretta era ancorata
all'idea che una teoria scientifica ha signi-
ficato fin tanto che parla di oggetti fisici
osservabili. Dal quadro proposto si do-
vrebbe dunque capire perche Einstein non
poteva non criticare la sostanzialita dello
spaziotempo: lo spaziotempo non e di
necessita qualcosa a cui si possa attribuire
un'esistenza separata, indipendentemente
dagli oggetti effettivi della realta fisica. Gli
oggetti fisici non sono nello spazio, bens
spazialmente estesi. In tal modo il concetto
di ``spazio vuoto'' perde il suo significa-
to [28].
L'immagine di spazio alla quale Ein-
stein nel 1952 dira di sentirsi vicino e quella
di Cartesio, a cui la relativita generale
avrebbe ricondotto: uno spazio che non
ha esistenza separata rispetto a ``cio che
riempie lo spazio'' e che dipende dalle
coordinate. Cio che riempie lo spazio
per la relativita generale e il campo gravi-
tazionale, descritto dai termini g
ik
, i quali
definiscono anche le proprieta strutturali
del continuo. Se immaginiamo di togliere
il campo gravitazionale, cioe le funzioni
g
ik
, [...] rimarra assolutamente nulla. Alla
luce di questa immagine di spazio, lo
spaziotempo di Minkowski non e uno
spazio senza campo, ma un caso speciale
del campo g
ik
, caso in cui le funzioni g
ik
hanno per il sistema di coordinate usato,
che non ha in se alcun significato oggettivo
dei valori indipendenti dalle coordinate.
Non esiste un qualcosa come uno spazio
vuoto, ossia uno spazio senza campo. Lo
spaziotempo non pretende di avere un'esi-
stenza per proprio conto, ma soltanto una
qualita strutturale del campo [29].
Puo essere utile fare qualche precisa-
zione circa la posizione di Einstein e il
sostanzialismo, essendo questo un punto
delicato e tuttora oggetto di discussione tra
212 O. Levrini
gli storici della fisica. In un suo studio
Kostro afferma che a partire dal 1916
Einstein utilizza praticamente come sino-
nimi i termini spazio fisico, etere,
campo: It must be noted, however, that
these three terms, which to some extent can
be considered as synonyms, were used by
Einstein in different periods with different
frequencies and with different ontological
values attributed to their meanings [30]. Il
fatto che spazio fisico ed etere siano
stati utilizzati come sinonimi di campo
puo anche essere letto a sostegno dell'idea
che in Einstein prevalesse una visione rela-
zionale dello spazio, perche il campo non e ,
per Einstein, una proprieta dello spazio,
ma un oggetto fisico esso stesso. Infatti,
quando definisce lo spazio come qualita
strutturale del campo, sta affermando che
l'esistenza e la forma di quest'ultimo sono
primarie rispetto alla nozione di spazio.
Dunque quando si afferma che in uno dei
suoi pellegrinaggi filosofici Einstein, rela-
tivamente all'etere, cambio parere e scris-
se numerosi articoli in cui si dichiarava
favorevole ad uno spazio dotato di pro-
prieta fisiche, da lui stesso chiamato piu
volte ``etere'' [31], si sta secondo me evo-
cando uno spazio che non e lo spazio a cui
pensava Einstein. Quest'ultimo, infatti,
non puo essere identificato con l'etere di
Lorentz le cui caratteristiche sono quelle di
essere sistema di riferimento privilegiato e
avere a certain substantility [32].
Tuttavia e vero che nel periodo tra il
1926 e il 1935, come dice Kostro, Einstein
prese in considerazione la possibilita che lo
spazio potesse essere tanto sostanziale da
poter generare le particelle elementari. Era
il periodo in cui, dopo il successo della
relativita generale, Einstein coltivava la
speranza di utilizzare la geometria come
base per una teoria unificata, ovvero l'idea
che tutta la fisica allora conosciuta potesse
essere spiegata in termini geometrici e
quindi rappresentata da un tensore metrico
generalizzato. Come dicono Earman e
Norton, pero , la forma di sostanzialismo
a cui approdo Einstein in quel periodo era
una forma banale di sostanzialismo, per-
che di fatto esprimeva semplicemente la
convinzione realista dell'esistenza di
una realta fisica indipendente dell'osserva-
zione: [that] substantivalist view would in
essence just assert the independent existen-
ce of the entire universe [33].
3. Il rifiuto di Poincare del sostanzialismo
e l'ontologia relazionista-convenzionalista.
Accanto al relazionismo di Einstein,
esiste un'altra prospettiva epistemologica
che conduce a rifiutare un'ontologia basa-
ta sulla sostanzialita dello spaziotempo.
Esplicito e deciso rappresentante di questa
posizione fu Poincare , il quale contro lo
spazio sostanziale disse: E
impossibile
rappresentarsi lo spazio vuoto. Tutti i
nostri sforzi per immaginare uno spazio
puro, da cui siano esclusi degli oggetti
materiali, non possono avere altro risulta-
to che una rappresentazione nella quale le
superfici intensamente colorate, ad esem-
pio, sono sostituite da linee di colori tenui,
e non potremmo percorrere fino in fondo
questa strada perche tutto svanirebbe e
finirebbe nel nulla. Da cio deriva l'irridu-
cibile relativita dello spazio. Chiunque
parli dello spazio assoluto fa uso di una
parola priva di senso [34]. Ancora: Scar-
tero in primo luogo l'idea di un preteso
senso dello spazio che ci farebbe localizza-
re le nostre sensazioni in uno spazio bell'e
fatto, la cui nozione sarebbe preesistente a
qualsiasi esperienza, e che prima di qual-
siasi esperienza avrebbe tutte le proprieta
dello spazio della geometria [35].
Il relazionismo di Poincare e piu espli-
cito di quello di Einstein e si esprime nel
fatto che per il fisico-matematico francese
Relativita ristretta e concezioni di spazio 213
l'oggetto della geometria, nonche lo spazio
fisico, e costituito dalle leggi che governano
una classe particolare di fenomeni, che
chiamiamo spostamenti e che e stata de-
finita grazie ad una relazione di reciproci-
ta tra i cambiamenti interni (movimenti
del nostro corpo) e cambiamenti esterni
(cambiamenti da noi attribuiti agli oggetti
esterni) [36]. La classe degli spostamenti e
affrontabile matematicamente perche ha le
proprieta che i matematici riassumono in
una sola parola dicendoche gli spostamenti
formano un ``gruppo'' [37]. La concezio-
ne di spazio di Poincare nasce dall'espe-
rienza sensibile ed e il risultato di una
razionalizzazione operata con atti intel-
lettuali e immaginativi: il senso dello spa-
zio si riduce quindi a un'associazione co-
stante tra certe sensazioni e certi movimen-
ti, o la rappresentazione di questi movi-
menti. (Vi e ancora bisogno di ripetere, per
evitare un equivoco ricorrente nonostante
le mie reiterate spiegazioni, che nonintendo
con cio la rappresentazione di questi movi-
menti nello spazio, ma la rappresentazione
delle sensazioni [propriocettive, cinestesi-
che, ecc.] che li accompagnano?) [38].
Le citazioni riportate permettono di
introdurre l'idea che il rifiuto di uno spazio
sostanziale di Poincare e giustificato non
solo sulla base della sua non-osservabilita
o del suo appartenere all'Olimpo dell'a-
priori e quindi su base ontologica
ma anche, e soprattutto, sulla base di una
visione filosofica piu ampia. Nell'a mbito di
questa visione la geometria viene letta
come linguaggio e, di conseguenza, lo
spazio come di natura relazionale.
La filosofia dello spazio di Poincare e ,
infatti, definita dal particolare intreccio tra
esperienza e ragione, tra realta e pensiero
che colloca la visione del fisico-matematico
francese in un terreno intermedio tra l'em-
pirismo e l'a-priorismo. E
lo stesso Poin-
care che dice: Si vede dunque che, se la
geometria non e una scienza sperimentale,
e una scienza la cui nascita e legata all'e-
sperienza; siamo noi ad aver creato lo
spazio che essa studia, ma adattandolo al
mondo in cui viviamo. Abbiamo scelto lo
spazio piu comodo, ma e l'esperienza ad
aver guidato la nostra scelta. Poiche questa
scelta e inconscia, ci sembra imposta; alcu-
ni dicono che ci e imposta dall'esperienza,
altri sostengono che nasciamo tutti con il
nostro spazio bell'e pronto. Le considera-
zioni precedenti mostrano in quale misura
queste due concezioni siano in parte vere e
in parte errate [39].
Gli assiomi geometrici non possono
essere fatti sperimentali perche la geome-
tria e una scienza esatta e come tale non
puo dipendere da proprieta fisiche (come le
proprieta della luce per la geometria
proiettiva o le proprieta dei corpi rigidi
per la geometria metrica). Al contempo
tali assiomi non possono essere verita
necessarie perche si sarebbero imposti al-
l'intelletto e avrebbero impedito la formu-
lazione di geometrie diverse. Essi, pertan-
to, oltre a non poter essere fatti sperimen-
tali, non possono nemmeno essere giudizi
sintetici a-priori o giudizi analitici.
Poincare e esplicito e deciso nel soste-
nere, invece, che gli assiomi geometrici
sono convenzioni. Gli assiomi geometrici
non sono, dunque, ne giudizi sintetici a-
priori, ne fatti sperimentali. Sono conven-
zioni; la nostra scelta, fra tutte le conven-
zioni possibili, e guidata da fatti sperimen-
tali, ma resta libera e non e limitata che
dalla necessita di evitare ogni contraddi-
zione [40].
Il termine convenzione e stato ogget-
to di piu letture nonche parola chiave per
etichettare posizioni tra loro molto diverse.
Convenzione per Poincare non e la
scelta arbitraria o un semplice accordo
intersoggettivo che starebbero alla base di
un conventionalism trivialized [41]. Fu
214 O. Levrini
Gru nbaum a chiamare model theoretic
trivalization quella visione che banalizze-
rebbe il convenzionalismo nel momento in
cui lo estende dalla geometria applicata in
fisica a tutti i concetti e alle teorie fisiche.
Secondo questa visione una teoria fisica e
vista come un calcolo formale non inter-
pretato i cui termini acquistano significato
attraverso la loro correlazione con certe
proprieta empiriche mediante regole di
corrispondenza che, nella maggior parte
dei casi, prendono la forma di procedimen-
ti di misura. E, poiche i procedimenti di
misura spesso non sono unici, la scelta
diventa convenzionale nel senso di arbi-
traria, frutto di un accordo intersogget-
tivo. Questa visione implica il rifiuto di un
concetto forte di verita e il rischio di una
deriva verso una posizione nominalistica,
lontana da Poincare il quale enfatizza
ovunque nei suoi scritti il ruolo dell'espe-
rienza come occasione per l'intelletto e
come guida e vincolo nella costruzione
della geometria.
La geometria e detta da Poincare con-
venzionale in quanto e il prodotto di una
operazione formale d'idealizzazione che
l'intelletto umano fa agendo razionalmen-
te sulle esperienze sensibili. La costruzione
della geometria avviene sulla base dell'e-
sperienza e passa attraverso un processo di
generalizzazione che porta dallo spazio di
relazioni del nostro corpo (spazio non
omogeneo) ad uno spazio esteso omogeneo
e infine, attraverso un processo d'immagi-
nazione, al grande spazio in cui collocare
l'universo [42]. La convenzionalita risie-
de nel fatto che la geometria, quando e
detta essere lo studio dei movimenti soli-
di, non si occupa dei solidi naturali, ma
ha per oggetto alcuni solidi ideali, assolu-
tamente invariabili, che non ne sono che
un'immagine semplificata e lontana [43].
Detto in altro modo: fare della geometria
equivale a studiare le proprieta dei nostri
strumenti, cioe le proprieta del corpo soli-
do. Nello stesso tempo essa non puo
dipendere dall'imperfezione insita in uno
strumento reale, per cui saremmo tentati
di dire che la geometria e lo studio delle
proprieta che avrebbero gli strumenti se
fossero perfetti. [...] In questo senso la
geometria e una convenzione, una specie
di limite impreciso tra il nostro amore per
la semplicita e il nostro desiderio di non
scostarci troppo da quello che ci dicono gli
strumenti [44].
La peculiarita della posizione di Poin-
care sta nel ruolo da questi attribuito
all'esperienza, ruolo che permette di anco-
rare una visione convenzionalistica della
geometria e della fisica ad un'ontologia
fortemente connotata come realista.
L'esperienza, secondo Poincare , e sto-
ricamente intervenuta nella costruzione
della geometria sotto forma di esperienza
ancestrale, nel senso che per selezione
naturale il nostro intelletto si e adattato alle
condizioni del mondo esterno, e ha adot-
tato la geometria piu conveniente per la
specie o, in altri termini, piu comoda [45].
Dunque l'esperienza non serve per dimo-
strare sperimentalmente gli assiomi della
geometria: tale operazione, infatti, e priva
di alcun significato data l'esattezza della
geometria, ovvero il suo parlare non del
mondo reale ma di un mondo ideale. Il
ruolo dell'esperienza e invece quello di
plasmare il pensiero razionale e di con-
seguenza di ancorarlo al mondo naturale
anche quando sembra allontanarsene. In-
fatti l'uomo in quanto essere biologico
evolve in diretto rapporto con il mondo
naturale; cio significa che anche quando
utilizza, nel compiere scelte e nel costruire
la conoscenza, criteri formali e apparente-
mente svincolati dal mondo fattuale, egli in
realta agisce in conformita a criteri dettati
da un'esperienza ancestrale, a sua volta
derivata dal processo di adattamento del-
Relativita ristretta e concezioni di spazio 215
l'uomo all'ambiente circostante e, dunque,
portatrice d'informazioni circa il mondo
naturale. In questa posizione si sente molto
forte l'influenza dell'evoluzionismo darwi-
niano nella sua veste epistemologica [46].
In coerenza con questo ruolo attribuito
all'esperienza, Poincare vede la costruzio-
ne dello spazio geometrico (spazio dota-
to di proprieta quali, ad esempio, la conti-
nuita , l'omogeneita , l'isotropia, il suo esse-
re infinito e il suo possedere tre dimensioni)
a partire dallo spazio rappresentativo
(il quadro di riferimento delle nostre rap-
presentazioni e delle nostre sensazioni)
come un'educazione progressiva nella
quale e assai difficile stabilire quale sia il
ruolo dell'individuo e quale il ruolo della
specie [47].
Anche il concetto di gruppo indicato da
Poincare in La scienza e l'ipotesi come l'a-
priori dell'intelletto ([..] preesiste nel no-
stro intelletto, almeno in potenza [48])
fonda le proprie origini in motivi genetici,
in associazioni d'idee che si sono consoli-
date attraverso i processi evolutivi. Esso e
pertanto molto lontano da quello kantiano
perche e un a-priori per l'individuo ma non
per la specie: E
possibile [che nel conce-
pire un esperimento s'immaginino come
possibili due risultati contrari] ma difficile,
proprio perche dobbiamo vincere numero-
se associazioni d'idee frutto di una lunga
esperienza personale e dell'esperienza an-
cora piu lunga della razza umana. Sono
forse tali associazioni (o almeno quelle
ereditate dai nostri antenati) a costituire
la forma a-priori di cui abbiamo l'intuizio-
ne pura? [49].
Quanto detto ci permette di capire le
motivazioni culturali che portano Poincare
a fondare la relativita ristretta sulle tra-
sformazioni di Lorentz riconosciute come
gruppo d'invarianza dell'elettrodinamica.
Tale lettura, dice Giannetto, riflette diret-
tamente per tutte le parti della fisica (non
solo per la meccanica, ma anche, in parti-
colare, per l'ottica e l'elettrodinamica) la
realta relazionale del moto, e allo stesso
modo la realta invariante del moto della
luce. E ancora: L'invariante metrico del-
la teoria non corrisponde ad un misterioso
quanto astratto ``spaziotempo'' non misu-
rabile, ma [...] a processi di moto invarianti
e reali come quello della luce ds
2
0 o
delle particelle ``materiali'' ds
2
> 0 o an-
cora alla non-globale ordinabilita tempo-
rale di eventi non connessi in processi di
moto ds
2
< 0 [50]. Nell'attribuire realta
fisica al moto e non ad entita come lo
spazio e il tempo Poincare si allinea su
una posizione alla Leibniz secondo la quale
spazio e tempo non sono che le relazioni
d'ordine possibile fra le monadi, interne a
questo moto dell'universo come un tutto
armonico [51].
L'idea relazionale di spazio proposta
da Poincare , coerente con l'attribuzione di
realta al movimento, e espressione di una
liberta immaginativa, creativa e organizza-
tiva dell'intelletto che non rinuncia alla
forza conoscitiva che gli deriva dall'essere
guidato e radicato nel mondo naturale. In
questo senso rappresenta l'espressione del
rifiuto di qualsiasi forma in cui l'assoluti-
smo si presenta nella scienza e nel pensiero
in generale: l'assolutismo delle posizioni
platoniche, cartesiane e kantiane, le quali
danno valore di necessita alla geometria
attraverso, rispettivamente, l'attribuzione
di sostanzialita a idee formali, di veracita
divina all'evidenza, di a-priorita del sogget-
to alle forme di conoscenza [52]. Contro
queste geometrie cristallizzate nel loro ruo-
lo di verita necessarie, Poincare propone
una geometria fatta di convenzioni, co-
me e fatta di convenzioni ogni lingua che si
deve costruire o esplorare. In questo modo
come dice Giannetto: Poincare decostrui-
sce la semantica referenziale denotativa
dell'ontologia newtoniana, e indica la teo-
216 O. Levrini
ria fisica come un ``gioco linguistico'' a
carattere ``esecutivo'' (performative). Cioe
come un linguaggio i cui enunciati acqui-
stano senso nelle pratiche fisico-sperimen-
tali corrispondentemente effettuate. [...] il
significato di una teoria fisica e associato
non a un linguaggio che rispecchia nei suoi
termini una realta meta-fisica come in se
data, ma ai contesti d'uso dei suoi termini
in relazione alle operazioni sperimentali,
identici per vari ``giochi linguistici'' possi-
bili [53].
4. La ricerca di un'ontologia come esigen-
za culturale e didattica.
La proposta di Minkowski di ancorare
la relativita ristretta ad un nuovo spazio
assoluto rilancia un'ontologia forte che
puo sollevare perplessita in chi, sulla scia
di Einstein, preferisce vedere nella teoria
gli aspetti relativistici come prioritari. Puo
invece rappresentare una lettura interes-
sante per chi, come Selleri, vede nella
relativita il rischio di fraintendimenti che
vanno in direzione di sostenere una filo-
sofia del relativismo. Comunque sia, an-
che l'interpretazione sostanzialista dello
spaziotempo di Minkowski e una lettura
possibile del formalismo della relativita
ristretta e, al giorno d'oggi, trae forza
persuasiva dalla constatazione che essa
rappresenta il presupposto necessario alla
comprensione della piu diffusa interpreta-
zione della relativita generale: l'interpreta-
zione metrica o geometrodinamica, di cui
importanti esponenti sono Wheeler e
Friedman [54].
Un'ontologia esplicitamente relazioni-
sta si ritrova, invece, alla base delle inter-
pretazioni della relativita generale propo-
ste da chi ha continuato il progetto einstei-
niano di costruire una teoria machiana
della gravitazione. Sto pensando, ad
esempio, a Sciama e alla sua lettura co-
struita sull'idea di una relativita dell'iner-
zia [55].
Un relazionismo che deriva dal consi-
derare la geometria un linguaggio si puo ,
infine, riconoscere alla base della partico-
lare interpretazione del formalismo della
relativita generale proposta da Weinberg
nel suo celebre trattato Gravitation and
Cosmology. Weinberg in questo contesto
rifiuta espressamente un'identificazione
letterale tra gravitazione e geometria e da
a quest'ultima il ruolo di analogia, di
strumento di costruzione teorica, di con-
venzione linguistica intesa nel senso di
Poincare [56].
Quelle che sembravano espressioni di
posizioni filosofiche di uomini di altri
tempi possono, dunque, essere considerate
la chiave per capire il significato di una
discussione tuttora aperta circa il signifi-
cato della relativita generale.
Bottazzini scrive di Poincare : Non
solo uno scienziato fuori dal comune, ma
un grande savant che dalle sue esplorazioni
nelle regioni piu inaccessibili delle scienze
matematiche e fisiche [...] ha tratto materia
per riflessioni originali su temi fondamen-
tali come lo spazio e il tempo, la scienza e la
natura della conoscenza razionale [57].
Proporre interpretazioni del formula-
rio della fisica alla ricerca di un'ontologia e
un'operazione che non puo essere condotta
utilizzando come strumenti culturali e per-
suasivi soltanto la logica interna o la prova
sperimentale. Questi sono strumenti neces-
sari ma non sufficienti. E
, infatti, inevita-
bile che in tale operazione si mettano in
gioco convinzioni e idee appartenenti ad
una complessiva visione del mondo, come
e successo a Minkowski, Einstein e Poin-
care , ma anche a Selleri e Bergia e Valle-
riani. Ritengo sia importante dal punto di
vista culturale che la comunita dei fisici
consideri di sua pertinenza l'interpretazio-
ne, anche ontologica, del formalismo e che
Relativita ristretta e concezioni di spazio 217
s'interroghi su come le conquiste della
ricerca di punta modificano l'immagine
del mondo. A mio avviso e , cioe , im-
portante che la fisica venga proposta nel
panorama culturale come conoscenza in
grado di contribuire a dare risposte a
domande primarie, riacquistando cos la
sua dimensione originaria di filosofia della
natura.
Cio ha forti implicazioni sul piano
didattico. Una fisica non interpretata e
presentata come insieme di teorie assur-
de da imparare perche funzionano pro-
duce un'immagine di se che si riversa dal-
l'universita nella scuola, provocando una
sensazione di disagio negl'insegnanti che si
trovano ad insegnare una disciplina lonta-
na dalle esigenze conoscitive degli studenti
e per questo sempre meno apprezzata. Il
recupero della dimensione ontologica per-
mette la costruzione di strumenti culturali
con i quali un insegnante puo superare tale
disagio, anche perche questa dimensione
tanto quanto quella epistemologica
apre spazi di riflessione che possono ren-
dere la fisica piu facilmente integrabile
nelle visioni del mondo individuali e quindi
piu viva e piu interessante.
Esplorare la fisica al fine di riconoscer-
vi le idee e le convinzioni generali di cui e
espressione significa arricchirne la valenza
culturale, ma non solo. Significa anche
poter enfatizzare nell'insegnamento l'espli-
citazione delle regole che contraddistin-
guono la fisica come disciplina: regole di
sintesi e rigore formale e di non con-
traddittorieta con l'osservabile. Tali rego-
le garantiscono l'oggettivita della fisica e
devono essere assunte come vincolanti se si
vuole rimanere dentro al gioco della cono-
scenza scientifica.
Note e riferimenti bibliografici.
[1] SELLERI F., Il principio di relativita e la natura del
tempo, G. Fis., 38 (1997) 67.
BERGIA S. e VALLERIANI M., Relativita ristretta:
convenzione o nuova concezione del mondo?, G.
Fis., 40 (1998) 199.
SELLERI F., Relativita ristretta: nuova concezione
del mondo o convenzione?, G. Fis., 40 (1999) 3.
[2] POINCARE
J. H., Sur la dynamique de l'e lec-
tron, Comptes Rendus de L'Academie des
Sciences, 1905; POINCARE
J. H., Sur la dyna-
mique de l'e lectron, Rendiconti del Circolo
Matematico di Palermo, 1906 (inviato alla
rivista nel luglio 1905). Sul ruolo di Poincare
nella nascita della relativita speciale si veda
GIANNETTO E., Henry Poincare and the rise of
Special Relativity, Hadronic Journal Supple-
ment, 10 (1995) 365.
[3] MINKOWSKI H., Raum und Zeit, Physikalische
Zeitschrift, 10, No. 3 (1909), 104-111 (versione
inglese: Space and Time, in LORENTZ H. A.,
EINSTEIN A., MINKOWSKI H. and WEYL H., The
principle of relativity. A collection of original
memoirs on the special and general theory of
relativity (with notes by A. Sommerfeld) (Dover
Publications, New York, N.Y.) 1952.
[4] KUHN T. S., The Structure of Scientific Revolu-
tions (University of Chicago Press, Chicago, Ill.)
1962 (trad. it. La struttura delle rivoluzioni scien-
tifiche (Einaudi, Torino) 1969).
[5] La traduzione italiana delle citazioni tratte dal-
l'articolo di Minkowski e dell'autore. La frase
citata, come tutte quelle che seguono di Minkow-
ski, sono tratte da MINKOWSKI, Space and Time,
in LORENTZ H. A., EINSTEIN A., MINKOWSKI H.
and WEYL H. (1952), op. cit.
[6] Il termine tedesco Welt e tradotto in italiano con
il termine universo e non con il termine mondo.
Tuttavia in questo contesto il termine mondo e
piu adatto a fare emergere il significato originale
attribuito da Minkowski allo spaziotempo: il
mondo naturale in cui ognuno di noi vive le
proprie esperienze e non una astrazione matema-
tica.
[7] GALISON P. L., Minkowski's Space-Time: From
Visual Thinking to the Absolute World, Histori-
cal Studies in the Physical Sciences, 10 (1979) 85.
[8] Corsivi aggiunti.
[9] BONIOLO G. e DORATO M., Dalla relativita gali-
leiana alla relativita generale, in BONIOLO G. (a
cura di), Filosofia della fisica (Mondadori, Mila-
no) 1997; BERGIA S. e VALLERIANI M. (1998), op.
cit.
[10] Corsivo aggiunto.
[11] Minkowski parla di pre-established harmony
between pure mathematics and nature nella
bozza del contributo indicata come Draft RZ
4, p. 22 labeled 20 (in GALISON P. L., (1979), op.
cit.).
[12] EINSTEIN A., U
ber die spezielle und allgemeine
Relativitatstheorie (gemeinvesta ndlich) (1916)
(trad. it. Relativita : esposizione divulgativa e
scritti classici su Spazio Geometria Fisica (Bollati
Boringhieri, Torino) 1994. La frase citata e alle p.
86-87 dell'edizione italiana).
[13] EINSTEIN A., Zur Elektrodynamik bewegter Kor-
per, Annalen der Physik, XVII (1905), 891-921
(trad. it. L'elettrodinamica dei corpi in movimen-
to, in BELLONE E. (a cura di), Albert Einstein.
Opere scelte (Boringhieri, Torino) 1988).
218 O. Levrini
[14] BERGIA S., Strutture e dimensionalita dello spa-
ziotempo: realta , modello o occasione di forma-
lismo?, in SELLERI F. e TONINI V. (a cura di), Dove
va la scienza. La questione del realismo (Dedalo,
Bari) 1990.
[15] Si veda, ad esempio, DUGAS R., L'incomprehen-
sion mathematique (Vuibert, Paris) 1940; PAIS A.,
Subtle is the Lord... The Science and the Life of
Albert Einstein (Oxford University Press, Ox-
ford) 1982 (trad. it., Sottile e il Signore... La
scienza e la vita di Albert Einstein (Bollati Borin-
ghieri, Torino) 1986).
[16] EINSTEIN A., Lettera a A. Sommerfeld, 1912, in
PAIS A. (1982), op. cit. La frase citata e a p. 236
dell'edizione italiana.
[17] HOLTON G., L'immaginazione scientifica (Einau-
di, Torino) 1983.
[18] EINSTEIN A., Lettera a C. Lanczos, 1938, in
HOLTON G. (1983), op. cit. La frase citata e a p.
165.
[19] EINSTEIN A., Lettera a M. Besso, 1952, in HOLTON
G. (1983), op. cit. La frase citata e a p. 169.
[20] KOSTRO L., An Outline of the History of Ein-
stein's Relativistic Ether Concept, in EISEN-
STAEDT J. and KOX A. J. (Eds.), Studies in the
History of General Relativity, Einstein Studies,
Vol. 3 (Birkha user, Boston, Mass.) 1992, p. 260-
280.
[21] Mach parla di mostruosita concettuale nella
prefazione alla settima edizione di MACH E., Die
Mechanik in ihrer Entwicklung, historisch-kritisch
dargestellt, 1883 (trad. it. La meccanica nel suo
sviluppo storico-critico (Bollati Boringhieri, To-
rino) 1977).
[22] EINSTEIN A., lettera a Schlick, 1930, in HOLTON
(1983), op. cit. La frase citata e a p. 167. Primo
corsivo aggiunto.
[23] Dove con a-priori qui s'intende indipendente
dall'esperienza. EINSTEIN A., Vier Vorlesungen
uber Relativitatstheorie (Vieweg & Sohn, Braun-
schweig) 1922 (trad. it. Il significato della relati-
vita (Bollati Boringhieri, Torino) 1959. La frase
citata e a p. 4 dell'edizione italiana).
[24] EINSTEIN A., La relativita e il problema dello
spazio (1952), appendice a Relativita: esposizio-
ne divulgativa e scritti classici su Spazio Geo-
metria Fisica (1994), op. cit. La frase citata e a
p. 300.
[25] Fu Leibniz con il suo celeberrimo argomento
dell'identita degl'indiscernibili a criticare per
primo una visione sostanzialista quale quella
newtoniana e a proporre come alternativa una
visione relazionista dello spazio (LEIBNIZ G. W.
and CLARKE S., A Collection of Papers which
passed between the late learned Mr. Leibniz and
Dr. Clarke, London, 1717). Per approfondimenti
su questo punto si veda FRIEDMAN M., Founda-
tions of Space-Time Theories (Princeton Univer-
sity Press, Princeton, N.J.) 1983. Per versioni
moderne dell'argomento leibniziano si veda, ad
esempio, EARMAN J. and NORTON J., What Price
Spacetime Substantivalism? The Hole Story,
Brit. J. Phil. Sci., 38 (1987) 515.
[26] EINSTEIN A., Ideas and Opinions, ed. riv. a cura di
Sonja Bergmann (Crown, New York, N.Y.)
1954. La frase citata e in HOLTON G., La lezione
di Einstein (Feltrinelli, Milano) 1997, p. 204.
[27] Si veda al proposito SCHILPP P. A. (a cura di),
Albert Einstein: philosopher-scientist (The Libra-
ry of Living Philosophers) 1949 (trad. it. Albert
Einstein: scienziato e filosofo (Boringhieri, Tori-
no) 1958) e l'analisi di Friedman circa la relazione
tra le teorie relativistiche e gl'ideali positivisti
(FRIEDMAN M. (1983), op. cit.)
[28] EINSTEIN A., Relativita: esposizione divulgativa e
scritti classici su Spazio Geometria Fisica (1994),
op. cit. La frase citata e a p. 44.
[29] EINSTEIN A. (1952), op. cit. La frase citata e a p.
311. Secondo corsivo aggiunto.
[30] KOSTRO L. (1992), op. cit.
[31] SELLERI F. (1997), op. cit.
[32] Si veda KOSTRO (1992), op. cit.
[33] EARMAN J. and NORTON J. (1987), op. cit.
[34] POINCARE
J. H., La relativite de l'espace, L'annee
psychologique, XIII, p. 1-17 (1907) e in Science et
methode (Flammarion, Paris) 1908 (trad. it. La
relativita dello spazio, in Scienza e metodo (Ei-
naudi, Torino) p. 79-99, 1997. La frase citata e a
p. 79 dell'edizione italiana).
[35] POINCARE
J. H., Dernieres pensees (Flammarion,
Paris) 1912 (trad. it. Spazio e tempo, in EINSTEIN,
A. Relativita: esposizione divulgativa e scritti
classici su Spazio Geometria Fisica (1994), op.
cit. La frase citata e a p. 281).
[36] POINCARE
J. H. La Science et l'Hypothese (Flam-
marion, Paris) 1902 (trad. it. La scienza e l'ipotesi
(Dedalo, Bari) 1989. La frase citata e a p. 83
dell'edizione italiana).
[37] POINCARE
J. H. (1902), op. cit. La frase citata e a
p. 84 dell'edizione italiana.
[38] POINCARE
J. H. (1912), op. cit. La frase citata e a
p. 282 dell'edizione italiana. Corsivo aggiunto.
[39] POINCARE
J. H. (1907), op. cit. La frase citata e a
p. 98 dell'edizione italiana. Corsivi aggiunti.
[40] POINCARE
J. H. (1902), op. cit. La frase citata e a
p. 72 dell'edizione italiana.
[41] FRIEDMAN M., Grunbaum on the Conventionality
of Geometry, Synthese, 24 (1972) 219-235.
[42] POINCARE
J. H. (1907), op. cit. La frase citata e a
p. 92 dell'edizione italiana.
[43] POINCARE
J. H. (1902), op. cit. La frase citata e a
p. 89 dell'edizione italiana.
[44] POINCARE
J. H. (1912), op. cit. La frase citata e a
p. 284 dell'edizione italiana.
[45] POINCARE
J. H. (1902), op. cit. La frase citata e a
p. 103 dell'edizione italiana.
[46] FORTINO M., Esperienza e ragione nel convenzio-
nalismo geometrico di Hanry Poincare , Episte-
mologia, XIX (1996) 51-84.
[47] POINCARE
J. H. (1907), op. cit. La frase citata e a
p. 98 dell'edizione italiana.
[48] POINCARE
J. H. (1902), op. cit. La frase citata e a
p. 90 dell'edizione italiana
[49] POINCARE
J. H., La valeur de la science (Flamma-
rion, Paris) 1905 (trad. it. Il valore della scienza
(Edizioni Dedalo, Bari) 1992. La frase citata e a
p. 100 dell'edizione italiana).
[50] GIANNETTO E. (1992), op. cit.
[51] GIANNETTO E., Note sul tempo e sul moto attra-
verso la storia della fisica e le critiche filosofiche,
in ROSSI A. (a cura di), Atti del XIII Congresso
Nazionale di Storia della Fisica (1992).
[52] FORTINO M., (1996), op. cit.
[53] GIANNETTO E., Note storico-critiche sul muta-
Relativita ristretta e concezioni di spazio 219
mento e il realismo: Henri Poincare , la Relati-
vita Speciale e le Teorie Fisiche, in GIULIANI G. (a
cura di), Ancora sul realismo (La Goliardica
Pavese, Pavia) 1995.
[54] Si veda, ad esempio, FRIEDMAN M. (1983), op. cit.
e WHEELER J. A, Physics as Geometry, Epistemo-
logia III, Numero Speciale - Special Issue (1980)
59-98.
[55] SCIAMA D. W., The Unity of the Universe (Faber
and Faber, London) 1959 (trad. it. L'unita del-
l'universo (Giulio Einaudi Editore, Torino)
1965).
[56] LEVRINI O., L'analogia geometrica in Weinberg
alla luce della concezione relazionista-convenzio-
nalista di Poincare , pre-print (1999).
[57] BOTTAZZINI U., Poincare . Il cervello delle scienze
razionali, I grandi della scienza, Le scienze, anno
II, n. 7 (1999).
220 O. Levrini
Che il sistema di riferimento eliocentri-
co sia il piu conveniente nello studio dei
moti planetari e dato per scontato nei corsi
liceali di fisica e di geografia e anche in
quelli universitari di carattere introdutti-
vo. Ai piu sono ignoti i motivi che impon-
gono questa scelta, nei rispetti di quella
geocentrica, della quale non saprebbero
valutare i vantaggi. In fatto di cinematica
del sistema solare, nella scuola italiana si
vive in una situazione curiosa: da una parte
anche i bambini sanno che la Terra gira
intorno al Sole; dall'altra e diffusa la piu
grande ignoranza dei fatti osservativi. La
maggior parte delle persone e, tra que-
ste, molti insegnanti di fisica conoscono
il modello geocentrico ma non saprebbero
dire come vanno le cose viste dalla Terra.
Tutto questo costituisce una grave limita-
zione alla possibilita di cogliere il signifi-
cato che il modello eliocentrico riveste in
relazione all'economia di pensiero nel con-
testo della cinematica planetaria. Ne biso-
gna dimenticare che e stata la scelta del
sistema eliocentrico che ha consentito l'e-
dificazione di una dinamica del sistema
solare: di Keplero prima e di Newton poi.
Forse e un sintomo della sindrome di Persi-
co [1] che affligge la scuola italiana il fatto
che, mentre e universalmente noto che, in
un riferimento eliocentrico, l'orbita dei
pianeti e ellittica, ben pochi saprebbero
non solo descrivere la forma della traietto-
ria nel riferimento geocentrico; ma neppu-
re dire in che senso, in conformita all'eti-
mo, i pianeti si muovano.
Scopo del presente lavoro e la proposta
di una linea didattica che, partendo dai dati
osservativi, ponga in luce la convenienza
del riferimento eliocentrico in relazione
alla determinazione della posizione dei
pianeti secondo l'osservatore terrestre e ai
loro periodi di visibilita .
1. Sistemi di riferimento.
In questa sezione, rivolta agl'insegnan-
ti, ci proponiamo di compiere il percorso
inverso, cioe di partire dal modello coper-
nicano orbite circolari e velocita ango-
lari costanti per ricavarne la cinematica
planetaria nel riferimento geocentrico. A
questo scopo, conviene fare distinzione tra
due riferimenti con il polo sulla Terra:
quello che ha l'asse polare orientato sul
Sole (e che chiameremo geo-solare) e quello
il cui asse, spiccato dalla Terra, e diretto
verso una stella (solitamente della costel-
lazione dell'Ariete, e percio detto Punto
d'Ariete o Punto Gamma); lo chiameremo
geo-centrico.
Consideriamo, nel riferimento solare,
QUESTIONI DIDATTICHE Q
Didattica dei moti planetari.
A. Berra
Liceo M. Fanti, viale Peruzzi 1 - Carpi (MO)
L. Stefanini
Ingegneria dell'ambiente e delle risorse dell'Universita, via Frattini 7 - 46100 Mantova
GIORNALE DI FISICA Ottobre-Dicembre 1999 VOL. XL, N. 4
la Terra ed un pianeta esterno (ad esempio,
Marte) del quale indichiamo con T il
periodo (in anni) e con R la distanza (in
Unita Astronomiche). I due valori sono
legati dalla terza legge di Keplero:
T
2
(anni) = R
3
(U.A.). (1)
Facciamo anche l'ipotesi che le due orbite
siano circolari e percorse con velocita co-
stante. Se prendiamo come istante iniziale
quello di opposizione, quello cioe in cui il
pianeta culmina alla mezzanotte, al tempo
t i due raggi che congiungono il Sole alla
Terra e al pianeta (fig. 1) formano un
angolo
0 = 2 1
1
T
_ _
t =
2
S
t. (2)
dove il tempo definito da
S =
T
T 1
(3)
e detto sinodico. In un tempo uguale a S
l'angolo tra i detti raggi diventa uguale a
2. Pertanto il periodo sinodico e l'interval-
lo di tempo tra due opposizioni successive.
a) Sistema di riferimento geo-solare.
In fig. 1 abbiamo indicato con c l'an-
golo tra la Terra e il Sole visti dal pianeta e
con c l'angolo, misurato da Terra, tra il
pianeta M e l'Antisole, cioe il meridiano a
mezzanotte. Un poco di trigonometria ba-
sta per accertare che
TM= , =
1 R
2
2R cos 0
_
. (4)
sen c =
sen c
R
. (5)
Fig. 1. Orbite circolari della Terra (T) e di unpianeta
esterno (M) intorno al Sole (S).
Fig. 2. Orbite circolari della Terra (T) e di un pianeta interno (V).
222 A Berra e L. Stefanini
Dalla seconda di queste discende
sen c
R
= sen (c 0) =
= sen c cos 0 cos c sen 0
e infine
tan c =
R sen 0
R cos 0 1
. (6)
L'angolo cassume valori che sono multipli
di 3608 per tempi multipli di S il che e ovvio
in quanto abbiamo definito il periodo sino-
dico come il tempo che intercorre tra due
opposizioni successive.
Nel caso che il pianeta sia interno, cioe
che il raggio dell'orbita sia minore di
1 U.A., la situazione e leggermente diversa
(fig. 2).
Non vi puo essere opposizione, ma solo
congiunzione con il Sole; superiore o
inferiore, a seconda che il pianeta si trovi
alla massima o alla minima distanza dalla
Terra. Risulta piu naturale fare riferimento
all'angolo che la direzione del pianeta
forma con la direzione del Sole
( = elongazione): il supplementare di c.
La relazione espressa dalla (6) in questo
caso assume la forma
tan =
R sen 0
1 R cos 0
. (7)
L'elongazione e massima per cos 0 = R
che e un risultato banale: il massimo si
raggiunge quando l'amgolo SVT e retto.
Il suo valore e tale che
tan
max
=
R
1 R
2
_ . (8)
Nel caso di Venere (R=0.723 U.A.)
max
468.
In un sistema di riferimento centrato
sulla Terra e diretto verso l'Antisole le
coordinate del pianeta sono
x = R cos 0 1.
y = R sen 0.
_
(9)
Da queste si ricava l'equazione cartesiana
dell'orbita con l'origine in S:
(x 1)
2
y
2
= R
2
(10)
che e una circonferenza (fig. 3).
Derivando la (6), tenuto conto della
prima delle (9) e della (2), si ottiene
dc
dt
= R
R cos 0
,
2
d0
dt
ovvero
dc
dt
= R
2
S
R cos 0
,
2
. (11)
Questa, rappresentata graficamente in
fig. 4, presenta massimi per tempi multipli
del periodo sinodico.
Dalla (11) si ricava anche
1
2
,
2
dc
dt
= R
S
(R cos 0).
Fig. 3. In un riferimento geo-solare le orbite dei
pianeti sono circonferenze col centro in S.
Fig. 4. Andamento della velocita angolare di un
pianeta esterno in un riferimento centrato sulla Terra
e diretto verso il Sole.
Didattica dei moti planetari 223
che rappresenterebbe la legge delle aree di
Keplero, se il secondo membro non conte-
nesse il termine cos 0 che dipende dal
tempo.
b) Sistema di riferimento geo-centrico.
Diversi sono i risultati che si ottengono
prendendo un riferimento terrestre ad
orientamento fisso, ad esempio con un
asse nella direzione della posizione di
opposizione del pianeta (fig. 5) sullo sfon-
do delle stelle.
Le coordinate del pianeta sono, in que-
sto riferimento,
x = R cos j cos t .
y = sen t R sen j.
_
(12)
dove
j =
2
T
t. t =
2t
1
= 2t.
essendo i periodi espressi in anni.
La traiettoria descritta dal pianeta e , in
questo caso piu complessa, come si osserva
nella fig. 6, 7 e 8.
Si puo osservare che le orbite non sono
chiuse. La velocita angolare del pianeta nel
riferimento geo-centrico orientato secondo
le stelle e data dalla differenza tra la
velocita angolare nel riferimento geo-cen-
trico ancorato al Sole (11) e la velocita
Fig. 5. Alla Terra (T) e stata ancorata una coppia di assi orientati secondo le stelle.
Fig. 6. Orbita di Marte nel riferimento Terra-stelle.
224 A Berra e L. Stefanini
angolare della Terra rispetto al Sole:
O =
dc
dt
2.
cioe
O = R
2
S
R cos 0
,
2
2.
da cui
O,
2
=2R
2S1
S
cos 0
(1R
2
) SR
2
(2S 1) R
_ _
.
Ma la (1) ci consente di esprimere il periodo
sinodico in funzione del raggio dell'orbita:
S =
R
R
_
R
R
_
1
. (13)
Sostituendo nella precedente si ottiene in-
fine
O,
2
=
2R(R
R
_
1)
S(R
R
_
1)
(14)
cos 0
R
R
_
R
R
_
1
_ _
.
Questa fornisce informazioni sulla direzio-
ne del moto dei pianeti, visti da Terra sullo
sfondo delle stelle. Infatti la velocita ango-
lare O e positiva, ovvero il moto e diretto
(cioe il pianeta si sposta da ovest verso est)
per
cos 0 <
R
R
_
R
R
_
1
. (15)
Ad esempio, Marte (R=1.524 U.A.), che
ha in periodo sinodico di 2 anni e 50 giorni,
e in moto diretto per
cos 0 < 0.957 .
cioe per
0.295 <
2
S
t < 2 0.295 .
ovvero per
37 giorni < t < 743 giorni .
dove i tempi sono riferiti ai momenti del-
l'opposizione.
37 giorni prima e 37 giorni dopo l'op-
posizione, Marte e stazionario.
Nell'intervallo di tempo tra le due sta-
zioni (74 giorni) e in moto retrogrado, cioe
da est verso ovest.
2. Sulle orme di Keplero.
In questa sezione descriviamo un per-
corso didattico che si differenzia da quello
Fig. 7. Orbita di Giove nel sistema di riferimento
Terra-stelle.
Fig. 8. Orbita di Venere nel sistema di riferimento
Terra-stelle.
Didattica dei moti planetari 225
dei classici testi di astronomia che
danno per ovvia l'adozione del riferimento
eliocentrico e s'ispira a proposte didat-
ticamente piu ambiziose (ad esempio, [2] e
[3]) che hanno trovato risposta anche in
Italia [4]. Essa prende le mosse dai dati
osservativi raccolti nel riferimento terre-
stre.
I dati sulla posizione dei pianeti si
trovano negli almanacchi astronomici che
vengono pubblicati annualmente. Il riferi-
mento piu diffuso in Italia e l'Almanacco
Astronomico Hoepli [5] facilmente reperi-
bile in libreria.
Per ogni pianeta e per intervalli di
tempo di 10 giorni, l'almanacco riporta
Distanza della Terra ed Elongazione (Di-
gressione la chiamava Galileo) rispetto al
Sole.
Sappiamo che, buona approssimazio-
ne, in un riferimento polare ancorato alla
Terra e con l'asse diretto verso il Punto
d'Ariete, il Sole descrive una circonferenza
(eclittica) che ha centro sulla Terra, Per un
osservatore posto sul polo nord terrestre, il
Sole percorre l'eclittica in senso antiorario
e con velocita angolare costante . 18/
giorno. Poiche nel giorno dell'equinozio di
primavera (80-esimo dell'anno) il Sole si
trova nel Punto d'Ariete, cioe ha longitu-
dine zero, siamo in grado di associare ad
ogni data la longitudine solare in questo
riferimento. L'almanacco formisce l'elon-
gazione del pianeta rispetto al Sole, misu-
rata in senso orario se e Ovest e in senso
antiorario se e Est; pertanto e possibile, per
ogni data, determinare la longitudine del
pianeta.
APPENDICE 1. Elongazione e distanza di Marte.
Data Elongazione Distanza
geocentrica
Data Elongazione Distanza
geocentrica
1 Gen. '97
21 Gen.
10 Feb.
2 Mar.
22 Mar.
11Apr.
1 Mag.
21 Mag.
10 Giu.
30 Giu.
20 Lug.
9 Ago.
29 Ago.
18 Ago.
8 Ott.
28 Ott.
17 Nov.
7 Dic.
27 Dic.
1 Gen. '98
21 Gen.
10 Feb.
2 Mar.
22 Mar.
11 Apr.
1 Mag.
21 Mag.
10 Giu.
30 Giu.
101 W
118 W
137 W
159 W
175.5 E
151 E
130 E
113 E
98.5 E
85.5 E
75 E
66 E
59 E
54 E
51 E
48 E
44 E
40 E
34 E
30 E
26 E
21 E
17 E
12 E
8 E
3 E
2 W
7 W
12 W
1.16
0.975
0.812
0.698
0.66
0.706
0.813
0.952
1.1
1.25
1.39
1.51
1.63
1.731
1.824
1.907
1.983
2.054
2.12
2.137
2.2
2.262
2.321
2.376
2.426
2.467
2.498
2.516
2.517
20 Lug.
9 Ago.
29 Ago.
18 Set.
8 Ott.
28 Ott.
17 Nov.
7 Dic.
27 Dic.
1 Gen. '99
21 Gen.
10 Feb.
2 Mar.
22 Mar.
11 Apr.
1 Mag.
21 Mag.
10 Giu.
30 Giu.
20 Lug.
9 Ago.
29 Ago.
18 Set.
8 Ott.
28 Ott.
17 Nov.
7 Dic.
27 Dic.
18 W
24 W
30 W
37 W
44 W
52 W
60 W
69 W
79 W
82 W
93 W
105 W
120 W
139 W
162 W
171 E
146 E
126 E
111 E
99 E
90 E
82 E
75 E
69 E
64 E
59 E
54 E
49 E
2.499
2.461
2.399
2.313
2.203
2.068
1.911
1.734
1.542
1.49
1.29
1.09
0.898
0.735
0.62
0.579
0.611
0.698
0.81
0.932
1.05
1.17
1.28
1.39
1.5
1.61
1.71
1.82
226 A Berra e L. Stefanini
Fig. 9. Orbita di Marte nel riferimento della Terra e orientato verso il Punto Vernale.
APPENDICE 2. Coordinate geocentriche di Venere.
Data Elongazione Distanza
geocentrica
Data Elongazione Distanza
geocentrica
1 Gen. '97
21 Gen.
10 Feb.
2 Mar.
22 Mar.
11Apr.
1 Mag.
21 Mag.
10 Giu.
30 Giu.
20 Lug.
9 Ago.
29 Ago.
18 Ago.
8 Ott.
28 Ott.
17 Nov.
7 Dic.
27 Dic.
21 Gen. '98
10 Feb.
2 Mar.
22 Mar.
11 Apr.
1 Mag.
21 Mag.
10 Giu.
30 Giu.
24 W
19 W
13 W
7 W
2 W
3 E
7 E
13 E
19 E
10 E
29 E
32 E
35 E
39 E
43 E
48 E
50 E
30 E
23 E
10 W
33 W
43 W
46 W
46 W
44 W
40 W
36 W
32 W
1.532
1.602
1.657
1.696
1.72
1.725
1.709
1.672
1.612
1.53
1.428
1.309
1.177
1.036
0.889
0.737
0.585
0.44
0.297
0.271
0.349
0.483
0.635
0.792
0.946
1.095
1.234
1.359
9 Ago.
29 Ago.
18 Set.
8 Ott.
28 Ott.
17 Nov.
7 Dic.
27 Dic.
1 Gen. '99
21 Gen.
10 Feb.
2 Mar.
22 Mar.
11 Apr.
1 Mag.
21 Mag.
10 Giu.
30 Giu.
20 Lug.
9 Ago.
29 Ago.
18 Set.
8 Ott.
28 Ott.
17 Nov.
7 Dic.
27 Dic.
22 W
16 W
11 W
6 W
1 W
4 E
9 E
14 E
15 E
20 E
25 E
29 E
33 E
38 E
41 E
44 E
45 E
44 E
36 E
18 E
15 W
35 W
44 W
46 W
46 W
43 W
40 W
1.559
1.629
1.678
1.707
1.716
1.707
1.682
1.641
1.628
1.569
1.495
1.405
1.298
1.174
1.034
0.881
0.72
0.56
0.412
0.308
0.298
0.386
0.52
0.669
0.819
0.964
1.102
Didattica dei moti planetari 227
Ad esempio, il 21 giugno del '98 (172-
esimo giorno dell'anno) la longitudine del
Sole e
`
S
= (172 80)
= 92
.
Alla stessa data l'almanacco riporta per
l'elongazione di Marte 108 W; pertanto
la longitudine del pianeta sara `
S
=
= 92
10
= 82
.
L'almanacco consente di costruire una
tabella delle longitudini dei pianeti nel
corso dell'anno, e di correlarle alla loro
distanza dalla Terra; e di realizzare una
rappresentazione grafica del moto del pia-
neta nel rifornimento della Terra ancorato
alle stelle.
Nelle appendici 1 e 2 riportiamo elon-
gazione solare e distanza geocentrica per
Marte e Venere ad intervalli di 20 giorni
per gli anni '97, '98 e '99.
Se si riportano in diagramma polare la
posizione del Sole e del pianeta si ottiene
un grafico simile a quello di fig. 9.
Si osserva che la complessita dell'orbi-
ta non consente una descrizione in termini
matematicamente semplici. Le cose si
semplificano notevolmente se si riferisce
l'asse polare al Sole, cioe se si misura la
longitudine del pianeta rispetto alla dire-
zione del Sole sull'eclittica, ovvero se si
prende come longitudine del pianeta la
sua elongazione. In questo caso il grafico
dell'orbita del pianeta risulta circolare,
come in fig. 10.
La cosa importante e che tutte le orbite
dei pianeti risultano essere circonferenze
con il centro nel Sole. Si riscopre in questo
modo il sistema di Tycho Brahe al quale,
tra il Cinquecento e il Seicento, fu attribui-
ta dignita almeno pari a quella dei due
massimi sistemi.
In questo sistema di riferimento i pia-
neti si muovono su circonferenze con il
centro nel Sole con in periodo uguale al
loro periodo sinodico. Le date di due
Fig. 10. Orbita di Marte in un riferimento geocentrico con l'asse polare ancorato al Sole.
228 A Berra e L. Stefanini
opposizioni successive (quindi il periodo
sinodico) si possono estrarre dagli alma-
nacchi. Per le velocita angolari si ricavano i
valori riportati in tabella I.
TABELLA I.
.
Mercurio
= 3.2
,giorno.
.
Venere
= 19
,mese.
.
Marte
= 14
,mese.
.
Giove
= 27.5
,mese.
.
Saturno
= 29
,mese.
I segni attibuiti alle velocita angolari si
riferiscono al fatto che i pianeti esterni si
muovono in senso orario (fig. 11), quelli
interni in senso antiorario (fig. 12).
Ma il criterio della massima semplicita
suggerisce di adottare come sistema di
riferimento quello centrato nel Sole e che
ha come polare l'asse Sole-Terra.
Inquestoriferimentole velocita angola-
ri nonsonoquelledi tabellaI, masi ottengo-
no da queste sommando la velocita angola-
re della Terra (. =1
,giorno=30
,mese).
Con cio si ottengono i valori riportati in
tabella II.
TABELLA II.
O
Mercurio
= 4.2
,giorno.
O
Venere
= 49
,mese.
O
Marte
= 16
,mese.
O
Giove
= 2.5
,mese.
O
Saturno
= 1
,mese.
da cui ricavano i periodi di tabella III.
TABELLA III.
T
Mercurio
= 86 giorni = 0.24 anni.
T
Venere
= 7.35 mesi = 0.61 anni.
T
Marte
= 22.5 mesi = 1.9 anni.
T
Giove
= 144 mesi = 12 anni.
T
Saturno
= 360 mesi = 30 anni.
Stabilito che nel sistema di riferimento
eliocentrico il moto dei pianeti e descrivi-
bile con semplicita (distanze e velocita
angolari costanti), vediamo come i risultati
ottenuti siano utilizzabili per calcolare i
periodi di visibilita dei pianeti.
3. Visibilita di Marte e Venere.
In questa sezione mostriamo un'appli-
cazione del modello eliocentrico come stru-
mento di calcolo per la determinazione dei
Fig. 11. Nel sistema di riferimento geocentrico
diretto verso il Sole l'orbita di Marte e una circonfe-
renza, percorsa in senso orario con periodo S.
Fig. 12. Nel sistema di riferimento geocentrico
diretto verso il Sole, Venere descrive un'orbita circo-
lare che percore in senso antiorario con periodo S.
Didattica dei moti planetari 229
periodi di visibilita dei pianeti, cioe nella
determinazione di dati suscettibili di con-
trollo osservativo.
I periodi di visibilita dei pianeti vengono
addirittura pubblicati sui quotidiani, per
cui si puo avere un facile controllo delle
previsioni ottenute sulla base del modello;
ma l'ideale, dal punto educativo, sarebbe
quellodell'osservazionedirettadegli allievi.
Marte e stato in opposizione il 17
marzo (76-esimo giorno) del '97, vale a
dire che, a quella data, culminava a mezza-
notte, ovvero sorgeva 12 ore dopo il Sole.
Consideriamo una data successiva; ad
esempio il 1 gennaio (18 giorno) del '99.
Tra le due date intercorre un intervallo
t = (365 2) 76 = 654 giorni.
In questo tempo, Marte ha percorso,
nel riferimento adottato, un angolo
0=
2
S
t =
2
2.11365
654=5.28 rad=303
.
dove il periodo sinodico e stato espresso in
giorni.
La situazione e quindi quella illustrata
in fig. 13.
Poiche per Marte R=1.52 U.A., dalla
(6) si ricava c = arctan
Rsen 0
Rcos 0
1
98
.
Poiche la sfera celeste ruota (in senso
orario) con una velocita angolare
360
24 ore
= 15
,ora =
1
4 min
.
il 1 gennaio del '99 Marte ha raggiunto la
culminazione 98 4 min 6.5 ore dopo
mezzanotte. Il pianeta in questo periodo e
visibile verso est a mezzanotte e a sud
all'alba.
La nuova opposizione rispetto al Sole
avviene al tempo
t=17 marzo '97+S=76+2.116365=
=854 giorni=2 anni+123 giorni
dopo il primo gennaio del '97, cioe il 3
maggio del '99.
In generale, l'anticipo di Marte sulla
mezzanotte, per la (6), dato da
t (ore) =
c
15
=
1
15
(16)
arctan
Rsen
t
S
1 Rcos
t
S
_
_
_
.
che presuppone accettabile l'approssima-
zione
1 anno=360 giorni
e nella quale, per lavorare in gradi sessa-
gesimali, t dev'essere espresso in giorni ed
S in anni.
L'anticipo e rappresentato graficamen-
te in fig. 14.
Ci proponiamo ora di calcolare la po-
sizione di Venere il primo febbraio del '99.
Venere e stata in congiunzione (supe-
Fig. 13. Posizione di Marte, nel riferimento eliocen-
trico, al 1 gennaio '99.
230 A Berra e L. Stefanini
riore) col Sole il 27 ottobre del '98. Aquella
data Venere culminava a mezzogiorno.
L'intervallo di tempo trascorso e di 97
giorni. Nel riferimento adottato, Venere
ha compiuto una rotazione di un angolo
2
S
t =
2
1.6 365
97 = 1.04 rad 60
.
Alla data considerata la situazione e
quella di fig. 15, dove 0 = 120
.
Dalla (7), per R=0.723 U.A., si ricava
tan =0.4598= 25
. Questi corrispon-
dono a 100 minuti ovvero a 1 ora 20 min.
Venere si trova in ritardo di un'ora e 20
rispetto al Sole: sara visibile la sera, in dire-
zione ovest, per un'ora dopo il tramonto.
Possiamo anche chiederci quando Ve-
nere serotina presenta la massima elonga-
zione. Questo si verifica quando 0 =
= 90
=0 = 44
.
Questi corrispondono a t =
0
2
S =
=
136
360
1.6 365 220 giorni dopo la con-
giunzione col Sole (o prima della). Quindi
la massima elongazione si presenta il 6
giugno '99. A quella data Venere e in
ritardo sul Sole di 46
= 184 min 3 ore.
Quindi e visibile ad ovest per tre ore prima
del tramonto.
Fig. 14. Anticipo della culminazione di Marte rispetto alla mezzanotte locale. L'asse dei tempi, tarato in giorni,
e centrato sul momento dell'opposizione.
Fig. 15. Posizione di Venere il primo febbraio del '99.
Didattica dei moti planetari 231
In generale l'anticipo (o il ritardo) di
Venere rispetto al Sole e dato da
T(ore) =
15
=
1
15
(17)
arctan
Rsen
t
S
1 Rcos
t
S
_
_
_
.
dove, ancora, t e in giorni ed S in anni.
L'anticipo e rappresentato graficamen-
te in fig. 16 su un periodo pari ad un anno
sinodico.
Per meta dell'anno sinodico (292 gior-
ni) Venere e vespertina, per l'altra meta
mattutina.
Bibliografia.
[1] PERSICO E., G. Fis., 1 (1956) 64; citato da CORTINI
G., Il Nuovo Saggiatore, n. 1, 1994.
[2] MINNAERT M. G. J., Pratical Work in Elementary
Astronomy (D. Reidel Publishing Co., Dor-
drecht) 1969.
[3] TATTERSFIELD D., Projects and Demonstrations in
Astronomy(StanleyThornesLtd, Cheltenham)1979.
[4] AA. VV., The Project Physics Course, Unita 2,
traduzione di V. Zanetti (Zanichelli Editore,
Bologna) 1970.
[5] DE MEIS S. e MEEUS J., Almanacco Astronomico
(Nuovo Orione, Hoepli, Milano) 1998.
Fig. 16. Anticipo di Venere rispetto al Sole in funzione del tempo. L'ascissa e espressa in giorni, l'ordinata in
ore.
232 A Berra e L. Stefanini
1. Premessa.
Un moderno ricevitore per i satelliti del
GPS (Global Positioning System) [1] offre,
a basso costo, nuove opportunita per un
insegnamento moderno della scienza della
misura, a livello universitario.
Abbiamo introdotto l'uso di questi
ricevitori nel 1995, fra gli esperimenti di
livello avanzato, che gli studenti, che
seguono Esperimentazioni di Fisica I par-
te, affrontano nella seconda parte del cor-
so. A quel tempo utilizzammo una scheda
ricevitore XR-4PC, prodotta dalla Nav-
star, chiedendo agli studenti di valutare la
precisione e l'accuratezza ottenibili nelle
misure di localizzazione spaziale (latitudi-
ne e longitudine). Furono fatte varie cam-
pagne di misure, dapprima con il ricevitore
in postazione fissa presso il Dipartimento
di Fisica [2]; in se guito, con lo stesso in-
stallato su un'automobile, furono misurate
le coordinate geografiche di punti architet-
tonicamente riconoscibili della citta di
Imola, per un successivo confronto con la
mappa disegnata nel 1502 da Leonardo da
Vinci [3].
Recentemente, abbiamo acquistato
due moduli VP Oncore prodotti dalla
Motorola. Essi sono molto versatili perche
comodi nell'uso (si collegano al PC tramite
la sua porta seriale standard); necessitano
di una semplice alimentazione a 12 V; il
software di corredo fornisce non solo la
soluzione finale ma anche molti risultati
intermedi, utili ad un uso didattico; sono
economici, pur garantendo prestazioni ele-
vate; infine rendono disponibile il segnale
un picco per secondo (1PPS) su una
porta d'uscita dedicata. Il costruttore ga-
rantisce un'accuratezza della soluzione
spaziale di 25 metri, che puo peggiorare
fino a circa 100 metri per effetto della
selective availability (
1
). Il segnale
1PPS, generato a partire dall'oscillatore
al quarzo interno al modulo, viene mante-
nuto sincronizzato con un'accuratezza di
circa 100 nanosecondi al tempo coordinato
universale, una volta che il ricevitore, in
postazione fissa, ha ricevuto i codici tra-
smessi da un numero di satelliti sufficienti a
permettere il calcolo della soluzione di
posizione.
Nel 1996e1997gruppi di studenti hanno
verificatol'attendibilita delle specifiche for-
nite dal costruttore, per quanto riguarda la
soluzione spaziale. Essi hanno misurato le
coordinate geografiche latitudine e longitu-
dine in vari punti della cinta muraria della
citta di Bologna, confrontando poi i valori
ottenuti con quelli ricavati per gli stessi
punti da una mappa geodetica locale [4].
Confronti fra scale di tempo: GPS ed oscillatori al quarzo.
M. Caporaloni
Dipartimento di Fisica dell'Universita - Bologna
R. Ambrosini
Istituto di Radioastronomia, CNR - Bologna
(
1
) Degradazione del segnale introdotta ad arte
dal Dipartimento della Difesa degli Stati Uniti per
limitare agli utenti civili la risoluzione intrinseca della
tecnica.
GIORNALE DI FISICA Ottobre-Dicembre 1999 VOL. XL, N. 4
Dopoaver rimossoladifferenzasistematica
tra i due diversi sistemi di riferimento di
coordinate(globalequellocui si riferisconoi
dati GPS, locale quello per la mappa geo-
detica), hanno trovato in generale discre-
panze dell'ordine di 20-30 metri, solo in
qualche caso di quasi 50 metri, ma mai
superiori. Tenendo conto che l'incertezza
totalepuo essereespressarispettoadistanze
pari al diametro terrestre, e evidente che le
misure GPS consentono una precisione di
poche parti per milione.
Dalla primavera del 1998 abbiamo ini-
ziato ad utilizzare i moduli VP Oncore per
misure nel dominio di tempo e frequenza.
Nuovi gruppi di studenti hanno confron-
tato, su scale di tempo dai secondi a pochi
minuti, il segnale 1PPS del ricevitore GPS
con altri analoghi ottenuti per divisione di
frequenza da diversi oscillatori al quarzo,
da loro stessi costruiti [5]. L'indagine e
proseguita con gli studenti del 1999, che,
oltre a verificare i risultati gia ottenuti
nell'anno precedente, hanno effettuato il
confronto anche su scale di tempo di alcuni
giorni.
Negli esperimenti di livello avanzato,
lasciamo che gli studenti, organizzati in
piccoli gruppi, lavorino in modo autono-
mo. Il docente, dopo una presentazione
iniziale, interviene solo se necessario, e su
loro diretta richiesta. Generalmente la pre-
sentazione termina con il suggerimento di
alcuni obiettivi agli studenti.
In questo caso li abbiamo invitati a
dimostrare se, e in quali condizioni, un
semplice oscillatore al quarzo potesse for-
nire una scala di tempo migliore del piu
complesso e costoso GPS.
Di fatto un oscillatore al quarzo mostra
un'elevata stabilita a breve termine, ma non
a lungo termine, poiche , in generale, la sua
frequenza deriva per effetto delle escursio-
ni della temperatura ambiente e per pro-
prio invecchiamento (ageing).
La scala di tempo GPS invece, garanti-
sce una stabilita elevata a lungo termine, in
quanto le stazioni a terra, preposte al
controllo del corretto funzionamento di
tutto il sistema dei satelliti GPS, manten-
gono la sincronizzazione degli orologi ato-
mici al cesio, posti a bordo dei satelliti, fra
loro e rispetto ad UTC.
Al contrario, su scale di tempo brevi, e
possibile attendersi che il segnale 1PPS,
generato localmente da un oscillatore al
quarzo, sia piu stabile di quello reso dispo-
nibile da un sistema complesso come il
GPS. Ci siamo quindi chiesti se fosse pos-
sibile determinare su quale scala di tempo
risultasse evidente questa differenza di
stabilita .
2. L'apparato sperimentale.
Abbiamo utilizzato un contatore di
frequenza di tipo universale. La configura-
zione per misure di frequenza permette di
acquisire un dato ogni tre secondi, da uno
dei due canali d'ingresso. E
anche possibile
effettuare misure d'intervalli di tempo; in
questo secondo caso lo strumento misura il
ritardo tra il segnale applicato al canale 1
(start) ed il segnale applicato al canale 2
(stop); con questa configurazione l'acqui-
sizione e piu veloce, un dato ogni secondo.
Fra i molti modelli di ricevitori GPS
occorre sceglierne uno che renda disponi-
bile il segnale 1PPS su una porta dedicata.
Sia il modulo VP Oncore che il piu recente
ed economico UT+, prodotti dalla Moto-
rola, offrono quest'opportunita . Una sem-
plice interfaccia da noi progettata [6] uti-
lizza il circu ito integrato MAX232 per
convertire i livelli TTL del segnale in uscita
dal modulo GPS a livelli appropriati alla
linea seriale RS232 d'ingresso al PC. Un
altro circu ito integrato isola (buffer) il
segnale 1PPS in uscita dal modulo, in
modo da poterlo distribuire anche su lun-
234 M. Caporaloni e R. Ambrosini
ghi cavi coassiali, terminati sulla loro im-
pedenza caratteristica (50 ).
Gli studenti hanno realizzato sia una
copia di quest'interfaccia, sia diverse sor-
genti di segnale di 1 Hz. Un primo tipo e
stato costruito partendo da un quarzo di
tipo economico da 1 MHz, segu to da una
catena di sei divisori di frequenza per dieci.
Migliori prestazioni si sono ottenute suc-
cessivamente, utilizzando un singolo cir-
cu ito integrato, prodotto dalla RS Com-
ponents (
2
), comprendente sia un oscilla-
tore sia un divisore programmabile. In
ogni caso, il costo e stato contenuto in
poche decine di migliaia di lire per unita .
La fig. 1 mostra l'assetto sperimentale
nel nostro laboratorio didattico.
3. Acquisizione ed analisi di dati su scale di
tempo brevi.
La raccolta dei dati sperimentali e
iniziata con la misura della frequenza di
ciascuna sorgente di segnale per pochi
minuti. Abbiamo chiesto agli studenti di
commentare i risultati mostrati in tempo
reale sul visualizzatore del counter, e di
estrarre tutte le possibili informazioni.
Queste le loro conclusioni.
Nessuna delle sorgenti di segnale ha
una frequenza esattamente uguale al
valore nominale di 1 Hz, ma tutte mostra-
no qualche differenza, positiva o negati-
va. In altri termini, i risultati forniti dal
counter non sono del tipo 1.000000000,
oppure 0.999999999. (Gli studenti si
aspettavano di trovare delle differenze
negli oscillatori da loro stessi costruiti,
ma il fatto di leggere che la frequenza
(
2
) Part numbers 301-858 e 301-864.
Fig. 1. L'apparato sperimentale per il confronto fra scale di tempo. Sulla parte destra e visibile il sistema
commerciale di acquisizione dei dati (il contatore universale HP53131A, collegato al PC con l'interfaccia
standard HPIB, e relativo software). Al centro e visibile il modulo VP Oncore, collegato tramite l'interfaccia da
noi progettata al PC portatile. Sull'estrema sinistra appare uno degli oscillatori al quarzo realizzati nel nostro
laboratorio.
Confronti fra scale di tempo: GPS ed oscillatori al quarzo 235
del segnale GPS era +1.4 mHz rispetto al
valore atteso ha creato loro dei problemi.)
La prima cifra fluttuante dei dati
GPS era quella delle decine e talvolta quella
delle centinaia di nHz. In quasi tutti gli
oscillatori al quarzo invece, la prima cifra
fluttuante era quella delle unita e solo
talvolta quella delle decine di nHz. (Gli
studenti hanno cos potuto constatare l'e-
videnza che le fluttuazioni del GPS erano
piu grandi di quelle di quasi tutti gli oscil-
latori al quarzo, e anche questo non se lo
aspettavano.)
Abbiamo a questo punto suggerito di
organizzare una serie completa di misure
per sostanziare in modo quantitativo le
precedenti osservazioni. La fig. 2 riporta
tutti i risultati in un unico grafico, per un
confronto diretto.
La frequenza di ciascuna sorgente di
segnale e stata misurata per cinque minuti,
un dato ogni tre secondi. Gli oscillatori
realizzati con componenti discreti, Q1 e
Q2, mostrano derive e un comportamento
irregolare. Al contrario, tutte le unita rea-
lizzate con gli oscillatori programmabili,
RS1, RS2, RS3, RS4, mostrano fluttuazio-
ni di frequenza piccole, anche se i loro
valori nominali di frequenza differiscono
sensibilmente. RS1 presenta la deviazione
standard piu piccola, 2 nHz; RS3 la devia-
zione standard piu grande, 17 nHz. Note-
volmente maggiore invece e la deviazione
standard dei dati GPS, risultata pari a 50
nHz. Gli studenti hanno cos potuto rico-
noscere che la grande complessita del GPS
puo implicare anche qualche limite nelle
prestazioni.
Per quanto concerne l'inattesa differen-
za di +1.4 mHz della frequenza dei dati
GPS, abbiamo aperto con gli studenti una
discussione sui seguenti punti. Il GPS e
Fig. 2. Confronto fra le fluttuazioni di frequenza di diverse sorgenti di segnale 1 PPS. Per riportare tutti i
risultati in un unico grafico, e stato necessario applicare offset diversi alle diverse serie di dati.
236 M. Caporaloni e R. Ambrosini
utilizzato per la navigazione, cos deve
essere accurato, perche una nave deve
conoscere sempre dove e il porto entro
poche decine di metri. Tenendo in conto
la velocita di propagazione dei segnali
elettromagnetici dai satelliti all'antenna
dell'utente (molto vicina alla velocita della
luce nel vuoto), un'incertezza di circa 30
metri nella localizzazione spaziale implica
un'incertezza di un centinaio di nanose-
condi nel tempo. Questi valori sono coe-
renti con le specifiche dichiarate dalla
Motorola; inoltre, come gia detto, l'incer-
tezza spaziale e stata confermata dai risul-
tati ottenuti dagli studenti negli anni pre-
cedenti, per questo tipo di ricevitore.
In realta , cio che e indispensabile e la
coerenza di frequenza all'interno della co-
stellazione dei satelliti GPS. D'altra parte il
sistema GPS rappresenta anche il metodo
di confronto fra i laboratori metrologici
delle scale di tempo di nazioni diverse, per
cui, di fatto, l'accuratezza del suo valore
nominale, entro poche parti su 10
7
, diventa
un requisito implicito.
Qual e allora la causa della differenza di
frequenza osservata di + 1.4 mHz? Se non
puo essere imputata alla grandezza sotto
misura, allora deve evidentemente essere
introdotta dallo strumento. Guarda caso,
la base dei tempi del counter e anch'essa
realizzata con un oscillatore al quarzo ed il
costruttore dichiara, come limite massimo
alla sua instabilita , 5 parti su 10
6
.
La conclusione netta di questa osserva-
zione e che il GPS puo essere utilizzato
efficacemente per controllare la corretta
calibrazione del quarzo interno del coun-
ter, con una tolleranza addirittura piu
stretta di quella garantita dal costruttore,
e questo senza il costo aggiuntivo di un
contratto di calibrazione (
3
)!
L'osservazione dei dati riportati infig. 2
suggerisce di poter evidenziare le caratteri-
stiche delle instabilita del segnale GPS tra-
mite un confronto diretto con il piu stabile
degli oscillatori. Il segnale generato da RS1
e stato connesso ad uno dei due canali
d'ingressodel counter, il segnale GPSall'al-
tro, e lo strumento e stato impostato per
misure d'intervalli di tempo. Con questa
modalita , e possibile acquisire un dato ogni
secondoe l'accuratezza intrinseca del coun-
ter diventa trascurabile, in quanto il con-
fronto avviene fra le due grandezze, circa
uguali, applicate ai suoi ingressi.
Sono state cos effettuate alcune serie di
misure di pochi minuti ciascuna, prelevan-
do i dati ad intervalli di un secondo. Come
previsto, l'osservabile misurato presenta
una pendenza lineare, positiva o negativa,
dovuta alla gia nota differenza di frequen-
za fra i due segnali: i tic delle due scale di
tempo si avvicinano oppure si allontanano
(ovviamente scambiando le sorgenti di se-
gnale sui due canali d'ingresso s'inverte la
pendenza, da positiva a negativa e vice-
versa).
Questa deriva lineare non c'interessa;
tramite un programma di foglio di lavoro
elettronico EXCEL essa e stata quantifica-
ta e poi rimossa dalla serie dei dati. Il
risultato di questa operazione e riportato
in fig. 3, dove si evidenzia un tipico dente
di sega, di periodo di circa 4 secondi (
4
).
Essendo la stabilita di frequenza del segna-
le di RS1, su queste scale di tempo, miglio-
re di circa venti volte di quella del segnale
GPS, il dente di sega deve essere ascritto a
quest'ultimo.
(
3
) Con un po' di pazienza, si puo regolare la vite
apposita, posta sul pannello posteriore dello strumen-
to, in modo tale da leggere un 1 segu to da sette zeri,
oppure uno 0 segu to da sette nove, quando il counter
misura la frequenza del segnale GPS.
(
4
) In realta , giungere a questo risultato e stato
molto piu difficile di quello che qui appare [5]. Infatti
il programma automatico d'acquisizione, a causa
della doppia sincronizzazione richiesta, portava a
perdere sistematicamente dati significativi!
Confronti fra scale di tempo: GPS ed oscillatori al quarzo 237
Gli studenti hanno anche trovato una
prova indipendente che il dente di sega e
generato dal modulo della Motorola, veri-
ficando che esso non compare, misurando
gl'intervalli di tempo fra due qualunque
dei loro oscillatori.
A posteriori, abbiamo potuto spiegare
la causa di questa granularita [7]. All'in-
terno di ogni ricevitore GPS vi e un oscil-
latore al quarzo, la cui frequenza fonda-
mentale viene divisa per il fattore numerico
(di lunghezza finita) tale da approssimare
al meglio in uscita il valore nominale di
1 Hz. Per evitare di accumulare errori di
troncamento per difetto o per eccesso,
questo fattore numerico viene sistematica-
mente cambiato del bit meno significati-
vo. Il risultato finale e quello mostrato
nella fig. 3: l'ampiezza del salto verticale
nel dente di sega vale il periodo di oscil-
lazione del quarzo, ed il tempo d'aggiu-
staggio circa 4 secondi. Questo effetto
scomparirebbe usando un loop di con-
trollo hardware tipo PLL (Phase Lock
Loop), ma la Motorola ha preferito la
soluzione sofware per evidenti vantaggi
economici.
Il confronto con un economico oscilla-
tore al quarzo ha reso cos evidente un
limite nelle prestazioni a corto termine del
ricevitore GPS. Come si osserva dalla figu-
ra, l'ampiezza della granularita vale circa
90 nanosecondi (differenza picco-picco),
mentre la deviazione standard calcolata su
100 secondi fornisce 36 nanosecondi. Tali
valori sono in accordo con quelli trovati da
misure analoghe, effettuate per confronto,
fra lo stesso tipo di ricevitore GPS ed il H-
Maser della stazione VLBI di Medicina.
La Motorola dichiara un'accuratezza
migliore di 50 nanosecondi (una deviazione
standard), per il ricevitore utilizzato in
Fig. 3. La granularita del segnale GPS, che ha periodo di circa 4 secondi, e resa evidente dal confronto con il
piu stabile segnale generato da un oscillatore al quarzo. Allo scarto di tempo fra i segnali GPS ed RS1, e stato
sottratto il fit lineare introdotto dalla differenza di frequenza fra i due.
238 M. Caporaloni e R. Ambrosini
hold mode (
5
) come nel nostro caso. Il
valore trovato di 36 nanosecondi e pertan-
to ragionevole e fornisce una stima dell'in-
certezza strumentale a corto termine,
quando si applica una media corrente sui
dati lunga almeno 8-10 secondi (running
average). La possibilita di mediare su
scale di tempo molto piu lunghe e ovvia-
mente fuori dal controllo di questo set-up
strumentale, in quanto richiederebbe oscil-
latori di riferimento con stabilita almeno
da campione atomico.
4. Acquisizione ed analisi di dati su scale di
tempo lunghe.
Estendere l'analisi a scale di tempo piu
lunghe, tipicamente qualche giorno, puo
evidenziare come le grandezze in esame e/o
lo strumento di misura siano influenzati
dall'ambiente. In particolare, e noto che
la frequenza d'oscillazione di un quarzo
dipende dalla temperatura della stanza;
con misure su tempi lunghi si puo allora
forse valutare quanto bene il software della
Motorola compensa anche le variazioni
di temperatura ambiente, sul quarzo inter-
no al modulo ricevitore.
La fig. 4 presenta le misure di frequenza
dell'oscillatore RS1 a confronto con la
temperatura interna del laboratorio, nel-
l'arco di due giorni. Le misure di tempera-
tura sono prelevate ogni mezz'ora, tramite
la nuova stazione meteorologica Health-
Weather installata, proprio quest'anno, da
un altro gruppo di studenti (
6
). Le misure
Fig. 4. La variazione di frequenza dell'oscillatore RS1, misurata dal counter, a confronto con la temperatura
della stanza.
(
5
) In questa modalita , il ricevitore e in postazio-
ne fissa; il software non calcola la soluzione di
posizione, ma latitudine e longitudine sono inseriti
come dati d'ingresso.
(
6
) Le giornate in cui si sono effettuate le misure
(marzo 1999) sono state caratterizzate da grande
instabilita meteorologica. In questo modo gli studenti
hanno giustificato l'andamento anomalo della tempe-
Confronti fra scale di tempo: GPS ed oscillatori al quarzo 239
di frequenza sono prelevate ad intervalli di
sei minuti, in modo da avere un campione
sufficiente ma non troppo numeroso, e
quindi piu facile da gestire. Nel grafico,
per comodita di lettura, alla frequenza
dell'oscillatore (secondo asse Y) e stato
sottratto il valore 1 Hz. Non meraviglia
di osservare che le due grandezze riportate
in figura presentino un andamento assai
simile. Del resto e ben nota la dipendenza
della frequenza di un quarzo dalla tempe-
ratura ambiente. Ma quanto di questa
variazione e dovuta all'oscillatore RS1 e
quanto al quarzo interno del counter?
La fig. 5 mostra la serie delle misure,
effettuate con le stesse modalita , per il
segnale GPS. Anche in questo caso ai
valori di frequenza, riportati sul secondo
asse Y, e stato sottratto 1 Hz. La varia-
zione massima dei valori di frequenza e di
circa 450 nHz: troppi per essere imputati
tutti al segnale GPS, che deve essere rite-
nuto accurato entro un centinaio di nHz.
Un contributo significativo deve allora
essere introdotto dal quarzo interno del
counter.
Una conferma di quest'ipotesi si ottie-
ne misurando l'intervallo di tempo fra i
segnali 1PPS, ottenuti da due ricevitori VP
Oncore. In questo caso il segnale GPS
risulta in comune ad entrambi, mentre gli
oscillatori dei ricevitori sono indipendenti
fra loro. I risultati delle misure sono ripor-
tati in fig. 6. Lo scarto fra i tic delle due
sorgenti di segnale resta stabile, indipen-
dentemente dalle variazioni della tempera-
tura ambiente: la sua deviazione standard
calcolata su 48 ore risulta pari a 110 ns.
Questo valore, a cui contribuiscono le
instabilita di entrambi gli oscillatori dei
ricevitori GPS, e piu alto di quello atteso
per grandezze totalmente indipendenti.
Consideriamo infatti il campione di
dati riportato in fig. 3, la cui deviazione
standard e risultata pari a 36 ns. Come
abbiamo gia detto, essa rappresenta il
limite inferiore alla stabilita del segnale
GPS, ed e stata ottenuta per confronto
Fig. 5. La variazione di frequenza del segnale GPS, misurata dal counter, a confronto con la temperatura della
stanza.
240 M. Caporaloni e R. Ambrosini
diretto con una sorgente di segnale piu
stabile (l'oscillatore al quarzo RS1). Se i
rumori degl'impulsi GPS, generati dai
due ricevitori VP Oncore, sono indipen-
denti fra loro, allora, misurando l'interval-
lo di tempo fra i due segnali, dobbiamo
aspettarci una deviazione standard di circa
36
2
p
ns. Ed e proprio quello che abbia-
mo ottenuto su scale di tempo brevi. Effet-
tuando alcune serie di misure d'intervalli di
tempo, fra i segnali 1PPS generati dai
nostri due ricevitori GPS, (ciascuna serie
per cinque minuti) lo scarto fra i tic delle
due scale presenta deviazioni standard
comprese fra 40 e 60 ns.
I valori piu elevati osservati invece su
scale di tempo piu lunghe sembrano sug-
gerire che i rumori dei segnali generati
dai due ricevitori non siano completamen-
te scorrelati.
Con le stesse modalita , sono state ef-
fettuate misure d'intervalli di tempo, per 24
ore consecutive, con due ricevitori GPS
diversi per l'hardware e per il software: il
nuovo VP Oncore della Motorola ed pre-
cedente XR4-PC della Navstar. Abbiamo
potuto constatare che durante l'acquisizio-
ne la costellazione dei satelliti utilizzati dai
due sistemi era parzialmente diversa. I dati
ottenuti sono analoghi a quelli riportati in
fig. 6; la deviazione standard e risultata in
questo caso di 130 ns.
5. Vantaggi didattici.
L'esperimento descritto consente di rie-
saminare, in un contesto moderno e piu
complesso, gli aspetti fondamentali del
procedimentodi misura, gia affrontati nella
prima parte del corso con l'ausilio di stru-
mentazione in quel caso molto semplice.
Gli studenti hanno potuto riconoscere
la forte connessione fra strumento e gran-
dezza in misura, osservando che il risultato
puo comprendere anche effetti sistematici
introdotti dallo strumento stesso.
Fig. 6. Misure d'intervallo di tempo fra i segnali 1 PPS forniti da due ricevitori GPS differenti. I dati
mostrano un andamento casuale.
Confronti fra scale di tempo: GPS ed oscillatori al quarzo 241
L'effettuaremisuredi precisione, conun
numero elevato di cifre significative, ha poi
messo in evidenza l'influenza dell'ambiente,
sia sulle grandezze in esame sia sullo stru-
mento di misura.
Tutti i confronti realizzati hanno por-
tato a distinguere, da diverse angolazioni,
la precisione e l'accuratezza delle grandezze
misurate. A breve termine, un economico
oscillatore al quarzo genera un segnale
1PPS piu stabile (piu preciso) di quello
ottenibile tramite un ricevitore GPS: 2
nHz di deviazione standard contro 50
nHz. Il segnale GPS pero e garantito essere
piu accurato, perche mantenuto sincroniz-
zato entro un centinaio di nanosecondi al
tempo coordinato universale UTC.
Il meccanismo di controllo introdotto
dalla Motorola ha lo svantaggio d'inserire
una granularita aggiuntiva sul segnale
GPS. Questo effetto puo essere facilmente
rimosso, ad esempio effettuando una me-
dia corrente su una decina di dati conse-
cutivi; di fatto questo dente di sega
indica che il segnale GPS e inadatto ad
essere utilizzato direttamente per misure su
intervalli di tempo inferiori ad alcune de-
cine di secondi.
A lungo termine, la frequenza di un
oscillatore al quarzo deriva, per effetto
delle variazioni della temperatura ambien-
te e dell'invecchiamento. Il segnale GPS
invece rimane accurato, e quindi e piu
stabile ed accurato di quello di un oscilla-
tore al quarzo.
La misura di una stessa grandezza
fisica, su scale di tempo differenti, ha
messo in luce un problema generale nell'a-
nalisi dei dati sperimentali: allungare i
tempi d'acquisizione, e/o aumentare il nu-
mero di misure su cui effettuare la media,
portano ad una riduzione della corrispon-
dente incertezza statistica, solo se vi sono
informazioni aggiuntive sullo spettro di
rumore della grandezza in esame.
Si puo anche concludere che per genera-
re una scala di tempo uniformemente preci-
sa ed accurata, occorre di fatto combinare
diverse sorgenti di segnale, ognuna con un
comportamento ottimale su un particolare
intervallodi tempo. Unadellegrandezzepiu
usateper descriverequesti comportamenti e
la varianza di Allan o varianza a due cam-
pioni [8]. Nel dominio del tempo, essa con-
sente di ricavare una stima dell'entita e del
tipo di rumore dominante sul segnale d'un
campione di frequenza. Un'analisi compa-
rata delle varianze di Allan, calcolate per
diverse sorgenti di segnale, sara uno degli
sviluppi dell'esperimento che chiederemo
agli studenti del prossimo anno.
Vale lapenacitare che ladisponibilita di
questi nuovi moduli GPS, a costo estrema-
mente contenuto, rende inpraticainutile, in
molti casi, acquistare un costoso orologio
atomico. Adesempio, unottimooscillatore
al quarzo, disciplinato da un ricevitore
GPS, puo soddisfare la stragrande maggio-
ranza delle applicazioni che richiedono un
campione di tempo e frequenza.
Nell'effettuare le misure, gli studenti
hanno scoperto che anche un sistema auto-
matico d'acquisizione puo commettere er-
rori. Ad esempio, in una nostra tipica
misura nella modalita intervalli di tem-
po, quando si sceglie di acquisire un dato
al secondo, ne viene sistematicamente per-
so uno, ogni 24 secondi circa. L'effetto e
particolarmente subdolo, perche la sua
evidenza appare a prima vista come un
salto dell'ordinata, piuttosto che come
un dato mancante. L'anomalia e legata al
fatto che sia la misura Start-Stop che
l'attesa di un secondo da parte di un pro-
gramma d'acquisizione, sono due tempo-
rizzazioni solo nominalmente uguali fra
loro, ma poiche sono processi generati in
modo indipendente, prima o poi, si trove-
ranno in conflitto. Nel nostro caso, abbia-
mo potuto verificare che e possibile mini-
242 M. Caporaloni e R. Ambrosini
mizzare, ma non eliminare del tutto, que-
sto effetto, semplicemente impostando un
tempo d'acquisizione molto minore di un
secondo (0.01s).
Nell'analisi dei dati di grandezze con
otto o nove cifre significative, gli studenti si
sono accorti dei limiti di precisione di
calcolo dei moderni fogli di lavoro elettro-
nici. Ad esempio, la deviazione standard
calcolata con EXCEL sui dati di frequenza
degli oscillatori RS riportati in fig. 2 forni-
va zero! Anche se il programma consente
di visualizzare fino a 30 posizioni deci-
mali, e semplice verificare che usa solo 15
cifre nei calcoli (lunghezza della mantissa).
Questa precisione non e sufficiente quando
i nostri tipici valori 10
9
sono elevati al
quadrato per stimare la deviazione stan-
dard. E
stato allora necessario adottare un
trucco: sottrarre 1 da ogni dato e poi
ripetere il calcolo.
* * *
Hanno collaborato con particolare en-
tusiasmo e impegno gli studenti Antinori
Samuele, Caminati Marco, Galletti Miche-
le, Di Giuseppe Angela, Parmeggiani Va-
lentina, Rosaverde Lara, Testoni Laura.
Bibliografia.
[1] WELLS D., Guide to GPS Positioning (Canadian
GPS Associates, Fredericton, New Brunswick)
1987.
[2] CAPORALONI M. e AMBROSINI R., Un sistema
ricevente per GPS nel laboratorio di Esperimenta-
zione Fisica I parte, G. Fis., 36 (1995) 29.
[3] CAPORALONI M. e AMBROSINI R., Student Project
Checks Leonardo da Vinci's Map Work, Comp.
Phys., 9 (1995) 505.
[4] CAPORALONI M., Aspetti didattici delle incertezze
di misura: precisione e accuratezza nei rilievi GPS,
in La misura delle grandezze fisiche, Atti della
Societa Torricelliana di Scienze e Lettere, Faen-
za, 1997, p. 205-216.
[5] CAPORALONI M. e AMBROSINI R., GPS and timing:
didactic applications on how to choose the best
clock, Volume 20, Number 4, p. 243-252 Euro-
pean Journal of Physics, July 1999.
[6] AMBROSINI R. et al., Extremely accurate timing
with a new Motorola module, Internal Report
IRA 273/99.
[7] KING M., MIRANIAN M. and BUSH D., Tests
results and analysis of a lowcost core GPSreceiver
for time transfer applications, paper presented at
the Institute of Navigation's 1994 National Tech-
nical Meeting, January 24-26, 1994, Session 1C.
[8] MANNUCCI R. e CORDARA F., Misurare il tempo e
la frequenza (Editrice Il Rostro, Milano) 1997, p.
397.
Confronti fra scale di tempo: GPS ed oscillatori al quarzo 243
INDICI DEL VOLUME XL (1999)
N. 1 Gennaio-Marzo 1999
L LETTURE SCIENTIFICHE
pag. A. Masani
3 Sir James Jeans, i suoi contributi allo sviluppo scientifico e le discussioni sollecitate fre i massimi
rappresentanti della scienza fisico-astronomica nelle prime decadi del XX secolo.
19 F. Selleri
Relativita ristretta: nuova concezione del mondo o convenzione?
25 L. Sertorio e G. Tinetti
Ecosistema stazionario.
Q QUESTIONI DIDATTICHE
49 M. Fazio
Dal calorico al calore, ovvero da Clapeyron a Clausius.
B IN BIBLIOTECA
57 J. P. Barde and D. W. Pearce
Valutare l'ambiente. Costi e benefici nella politica ambientale (G. Godoli).
57 D. Schena Sterza
Fenomenologie anomale e nuova fisica. Ricerca psichica, parapsicologia e meccanismi della
coscienza (G. Godoli).
58 G. Maltese
La storia di F=ma. La seconda legge del moto nel XVIII secolo (G. Godoli).
58 N. Ryde
Development of Ideas in Physics (G. Godoli).
59 G. Caglioti, S. Carra, L. Maiani, G. Parisi, L. A. Radicati di Brozolo e G. Setti
Il nuovo volto dell'Universo (G. Godoli).
59 M. Ageno
La comparsa della vita sulla Terra e altrove (G. Godoli).
60 M. La Forgia
Elettricita , materia e campo nella fisica dell'Ottocento (G. Godoli).
60 C. Tarsitani
Il dilemma onda-corpuscolo da Maxwell a Planck e Einstein (G. Godoli).
61 P. Casini
Filosofia e fisica da Newton a Kant (G. Godoli).
61 C. Borghero
Conoscenza e metodo della storia da Cartesio a Voltaire (G. Godoli).
62 L. Castellani and J. Wess
Quantum Groups and their Applications in Physics (V. de Sabbata).
C IN COPERTINA
Immagine in microonde del cielo visto dall'apparato DMR a bordo del satellite COBE, con
l'eliminazione di oggetti in primo piano e di effetti dovuti al moto locale. Le zone rosse indicano
regioni dove la temperatura misurata e elevata (COBE/DMR Team, NASA).
INDICE SISTEMATICO PER NUMERI SUCCESSIVI
DEL PERIODICO - VOL. XL (1999)
N. 2 Aprile-Giugno 1999
L LETTURE SCIENTIFICHE
pag. L. Sertorio
65 La freccia del tempo.
89 M. C. Sassi e F. Sebastiani
La formazione scientifica di Enrico Fermi.
Q QUESTIONI DIDATTICHE
115 L . Stefanini e A. Berra
Trottole e cicloidi.
121 S. Ganci
Esperienze d'aula sull'effetto fotoelettrico: alcune note.
B IN BIBLIOTECA
125 J. Hamilton
Aharonov-Bohm and other Cyclic Phenomena (V. de Sabbata).
125 M. Chaichian and R. Hagedorn
Symmetries in QuantumMechanics. FromAngular Momentumto Supersymmetry (V. de Sabbata).
C IN COPERTINA
E. Fermi a 16 anni in una fotografia di E. Persico (vedi articolo di M. Sassi e F. Sebastiani a p. 89).
N. 3 Luglio-Settembre 1999
L LETTURE SCIENTIFICHE
pag. A. Drago e A. Pirolo
129 Analisi del testo di Violle, il libro di meccanica su cui ha studiato Albert Einstein.
143 F. Cordella e F. Sebastiani
La corrispondenza Persico-Fermi (1922-1926).
165 F. De Vincentis
Ignazio Porro (1801-1875) e la nascita dell'ottica applicata in Italia.
Q QUESTIONI DIDATTICHE
177 M. Fazio
Riflessioni sui cicli termodinamici.
185 S. Ganci
Misurazione diretta della forza agente su un dielettrico.
C IN COPERTINA
Ignazio Porro (vedi articolo F. De Vincentis a p. 165).
N. 4 Ottobre-Dicembre 1999
L LETTURE SCIENTIFICHE
pag. A. Drago e G. A. La Sala
193 La dinamica dell'urto in Leibniz.
248 Indice per fascicoli
205 O. Levrini
Relativita ristretta e la concezione di spazio.
Q QUESTIONI DIDATTICHE
221 A. Berra e L. Stefanini
Didattica dei moti planetari.
233 M. Caporaloni e R. Ambrosini
Confronti fra scale di tempo: GPS ed oscillatori al quarzo.
I INDICI
245 INDICI DEL VOLUME XL
C IN COPERTINA
Ritratto di G. W. von Leibniz (vedi articolo di A. Drago et al. a p. 193).
Indice per fascicoli 249
L LETTURE SCIENTIFICHE
pag. A. Masani
3 Sir James Jeans, i suoi contributi allo sviluppo scientifico e le discussioni sollecitate fra i massimi
rappresentanti della scienza fisico-astronomica nelle prime decadi del XX secolo.
19 F. Selleri
Relativita ristretta: nuova concezione del mondo o convenzione?
25 L. Sertorio e G. Tinetti
Ecosistema stazionario.
65 L. Sertorio
La freccia del tempo.
89 M. C. Sassi e F. Sebastiani
La formazione scientifica di Enrico Fermi.
129 A. Drago e A. Pirolo
Analisi del testo di Violle, il libro di meccanica su cui ha studiato Albert Einstein.
143 F. Cordella e F. Sebastiani
La corrispondenza Persico-Fermi (1922-1926).
165 F. De Vincentis
Ignazio Porro (1801-1875) e la nascita dell'ottica applicata in Italia.
193 A. Drago e G. A. La Sala
La dinamica dell'urto in Leibniz.
205 O. Levrini
Relativita ristretta e la concezione di spazio.
Q QUESTIONI DIDATTICHE
49 M. Fazio
Dal calorico al calore, ovvero da Clapeyron a Clausius.
115 L . Stefanini e A. Berra
Trottole e cicloidi.
121 S. Ganci
Esperienze d'aula sull'effetto fotoelettrico: alcune note.
177 M. Fazio
Riflessioni sui cicli termodinamici.
185 S. Ganci
Misurazione diretta della forza agente su un dielettrico.
221 A. Berra e L. Stefanini
Didattica dei moti planetari.
233 M. Caporaloni e R. Ambrosini
Confronti fra scale di tempo: GPS ed oscillatori al quarzo.
INDICE DELLE RUBRICHE DEL VOLUME XL
(1999)
B IN BIBLIOTECA
57 J. P. Barde and D. W. Pearce
Valutare l'ambiente. Costi e benefici nella politica ambientale (G. Godoli).
57 D. Schena Sterza
Fenomenologie anomale e nuova fisica. Ricerca psichica, parapsicologia e meccanismi della
coscienza (G. Godoli).
58 G. Maltese
La storia di F=ma. La seconda legge del moto nel XVIII secolo (G. Godoli).
58 N. Ryde
Development of Ideas in Physics (G. Godoli).
59 G. Caglioti, S. Carra, L. Maiani, G. Parisi, L. A. Radicati di Brozolo e G. Setti
Il nuovo volto dell'Universo (G. Godoli).
59 M. Ageno
La comparsa della vita sulla Terra e altrove (G. Godoli).
60 M. La Forgia
Elettricita , materia e campo nella fisica dell'Ottocento (G. Godoli).
60 C. Tarsitani
Il dilemma onda-corpuscolo da Maxwell a Planck e Einstein (G. Godoli).
61 P. Casini
Filosofia e fisica da Newton a Kant (G. Godoli).
61 C. Borghero
Conoscenza e metodo della storia da Cartesio a Voltaire (G. Godoli).
62 L. Castellani and J. Wess
Quantum Groups and their Applications in Physics (V. de Sabbata).
125 J. Hamilton
Aharonov-Bohm and other Cyclic Phenomena (V. de Sabbata).
125 M. Chaichian and R. Hagedorn
Symmetries in QuantumMechanics. FromAngular Momentumto Supersymmetry (V. de Sabbata).
C IN COPERTINA
Immagine in microonde del cielo visto dall'apparato DMR a bordo del satellite COBE, con
l'eliminazione di oggetti in primo piano e di effetti dovuti al moto locale. Le zone rosse indicano
regioni dove la temperatura misurata e elevata (COBE/DMR Team, NASA).
E. Fermi a 16 anni in una fotografia di E. Persico (vedi articolo di M. Sassi e F. Sebastiani a p. 89).
Ignazio Porro (vedi articolo F. De Vincentis a p. 165).
Ritratto di G. W. von Leibniz (vedi articolo di A. Drago et al. a p. 193).
252 Indice delle rubriche
pag. Ageno M.
59 La comparsa della vita sulla Terra e altrove (G. Godoli) (B).
233 Ambrosini R.
(vedi Caporaloni M.) (Q).
57 Barde J. P. and D. W. Pearce
Valutare l'ambiente. Costi e benefici nella politica ambientale (G. Godoli) (B).
221 Berra A. e L. Stefanini
Didattica dei moti planetari (Q).
115 Berra A.
(vedi Stefanini L.) (Q).
61 Borghero C.
Conoscenza e metodo della storia da Cartesio a Voltaire (G. Godoli) (B).
59 Caglioti G., S. Carra, L. Maiani, G. Parisi, L. A. Radicati di Brozolo e G. Setti
Il nuovo volto dell'Universo (G. Godoli) (B).
233 Caporaloni M. e R. Ambrosini
Confronti fra scale di tempo: GPS ed oscillatori al quarzo (Q).
59 Carra S.
(vedi Caglioti G.) (B).
61 Casini P.
Filosofia e fisica da Newton a Kant (G. Godoli) (B).
62 Castellani L. and J. Wess
Quantum Groups and their Applications in Physics (V. de Sabbata) (B).
125 Chaichian M. and R. Hagedorn
Symmetries in Quantum Mechanics. From Angular Momentum to Supersymmetry (V. de Sab-
bata) (B).
143 Cordella F. e F. Sebastiani
La corrispondenza Persico-Fermi (1922-1926) (L).
165 De Vincentis F.
Ignazio Porro (1801-1875) e la nascita dell'ottica applicata in Italia (L).
129 Drago A. e A. Pirolo
Analisi del testo di Violle, il libro di meccanica su cui ha studiato Albert Einstein (L).
193 Drago A. e G. A. La Sala
La dinamica dell'urto in Leibniz (L).
49 Fazio M.
Dal calorico al calore, ovvero da Clapeyron a Clausius (Q).
177 Fazio M.
Riflessioni sui cicli termodinamici (Q).
121 Ganci S.
Esperienze d'aula sull'effetto fotoelettrico: alcune note (Q).
185 Ganci S.
Misurazione diretta della forza agente su un dielettrico (Q).
125 Hagedorn R.
(vedi Chaichian M.) (B).
INDICE PER AUTORI DEL VOLUME XL (1999)
125 Hamilton J.
Aharonov-Bohm and other Cyclic Phenomena (V. de Sabbata) (B).
60 La Forgia M.
Elettricita , materia e campo nella fisica dell'Ottocento (G. Godoli) (B).
193 La Sala G. A.
(vedi Drago A.) (L).
205 Levrini O.
Relativita ristretta e la concezione di spazio (L).
59 Maiani L.
(vedi Caglioti G.) (B).
58 Maltese G.
La storia di F=ma. La seconda legge del moto nel XVIII secolo (G. Godoli) (B).
3 Masani A.
Sir James Jeans, i suoi contributi allo sviluppo scientifico e le discussioni sollecitate fra i massimi
rappresentanti della scienza fisico-astronomica nelle prime decadi del XX secolo (L).
59 Parisi G.
(Vedi Caglioti G.) (B).
57 Pearce D. W.
(vedi Barde J. P.) (B).
129 Pirolo A.
(vedi Drago A.) (L).
59 Radicati di Brozolo L. A.
(vedi Caglioti G.) (B).
58 Ryde N.
Development of Ideas in Physics (G. Godoli) (B).
89 Sassi M. C. e F. Sebastiani
La formazione scientifica di Enrico Fermi (L).
57 Schena Sterza D.
Fenomenologie anomale e nuova fisica. Ricerca psichica, parapsicologia e meccanismi della
coscienza (G. Godoli) (B).
89 Sebastiani F.
(vedi Sassi M. C.) (L).
143 Sebastiani F.
(vedi Cordella F.) (L).
19 Selleri F.
Relativita ristretta: nuova concezione del mondo o convenzione? (L).
65 Sertorio L.
La freccia del tempo (L).
25 Sertorio L. e G. Tinetti
Ecosistema stazionario (L).
59 Setti G.
(vedi Caglioti G.) (B).
115 Stefanini L. e A. Berra
Trottole e cicloidi (Q).
221 Stefanini L
(vedi Berra A.) (Q).
60 Tarsitani C.
Il dilemma onda-corpuscolo da Maxwell a Planck e Einstein (G. Godoli) (B).
25 Tinetti G.
(vedi Sertorio L.) (L).
62 Wess J.
(vedi Castellani L.) (B).
254 Indice per autori
Potrebbero piacerti anche
- Analisi critica dell'articolo di Einstein_ITALIANODa EverandAnalisi critica dell'articolo di Einstein_ITALIANONessuna valutazione finora
- Il significato filosofico del principio di relativitàDa EverandIl significato filosofico del principio di relativitàNessuna valutazione finora
- A. Drago - La Riforma Della Dinamica Secondo LeibnizDocumento6 pagineA. Drago - La Riforma Della Dinamica Secondo LeibniznellopostiNessuna valutazione finora
- LagrangeDocumento91 pagineLagrangericcardoNessuna valutazione finora
- Relatività RistrettaDocumento96 pagineRelatività RistrettaivanpaoloNessuna valutazione finora
- LagrangeDocumento98 pagineLagrangeobertocNessuna valutazione finora
- Berkeley e Mach Contro Lo Spazio AssolutoDocumento3 pagineBerkeley e Mach Contro Lo Spazio AssolutoEsonet.orgNessuna valutazione finora
- Equazioni Di Lagrange PDFDocumento98 pagineEquazioni Di Lagrange PDFEmanuele StillitaniNessuna valutazione finora
- RistrettaDocumento77 pagineRistrettaangelo.sgroi85Nessuna valutazione finora
- Cap 5 RelativitaDocumento94 pagineCap 5 Relativitadeltaray70Nessuna valutazione finora
- RelativitàDocumento132 pagineRelativitàSamuela Furcas100% (1)
- Linfluenza Di Mach Sul Pensiero Di EinstDocumento13 pagineLinfluenza Di Mach Sul Pensiero Di EinstanderaNessuna valutazione finora
- La Gravita QuantisticaDocumento11 pagineLa Gravita QuantisticaMadden JolieeNessuna valutazione finora
- Giornale Di Fisica 03/1999Documento61 pagineGiornale Di Fisica 03/1999Mark_DVNessuna valutazione finora
- Spazio Tempo AssolutiDocumento19 pagineSpazio Tempo AssoluticuriosityNessuna valutazione finora
- Teoria Della Relatività - WikipediaDocumento8 pagineTeoria Della Relatività - Wikipediaalfonso_belfioreNessuna valutazione finora
- Relatività GeneraleDocumento40 pagineRelatività GeneralebananavajoNessuna valutazione finora
- Ordine e Caos Nei Sistemi DinamiciDocumento76 pagineOrdine e Caos Nei Sistemi DinamicimassimoscribdNessuna valutazione finora
- FISICA Relatività Albert EinsteinDocumento2 pagineFISICA Relatività Albert EinsteinFederica PassavantiNessuna valutazione finora
- Fabio Lelli - Linguaggio Esperimento e Realtà Nelle Riflessioni Filosofiche Di HeisenbergDocumento12 pagineFabio Lelli - Linguaggio Esperimento e Realtà Nelle Riflessioni Filosofiche Di Heisenbergapi-19623993Nessuna valutazione finora
- Relatività Ristretta Parte 6Documento5 pagineRelatività Ristretta Parte 6Giuseppe PoderiNessuna valutazione finora
- Concetto Di Spazio Nel Carteggio LeibnizDocumento7 pagineConcetto Di Spazio Nel Carteggio LeibnizAndrea BelliniNessuna valutazione finora
- Relatività Ristretta Parte 2Documento5 pagineRelatività Ristretta Parte 2Giuseppe PoderiNessuna valutazione finora
- Fisica Interrogazione Maggio+PDFDocumento2 pagineFisica Interrogazione Maggio+PDFasiaNessuna valutazione finora
- La Teoria Della RelativitàDocumento1 paginaLa Teoria Della RelativitàMaxNessuna valutazione finora
- APPUNTI Fisica ModernaDocumento2 pagineAPPUNTI Fisica ModernaMatteo AmicarellaNessuna valutazione finora
- NewtonDocumento1 paginaNewtonMario TI STUPRONessuna valutazione finora
- P. Odifreddi - La Matematica Con La CravattaDocumento1 paginaP. Odifreddi - La Matematica Con La CravattanellopostiNessuna valutazione finora
- TesinaDocumento2 pagineTesinaDrea23Nessuna valutazione finora
- Passaggio 800-900 FisicaDocumento33 paginePassaggio 800-900 FisicagiannaNessuna valutazione finora
- Tempo 4Documento3 pagineTempo 4Christian 7Nessuna valutazione finora
- Teoria Della Relativita'Documento2 pagineTeoria Della Relativita'MarioNessuna valutazione finora
- Buccheri-Leggi Di KepleroDocumento13 pagineBuccheri-Leggi Di KeplerorffsllNessuna valutazione finora
- Relatività Ristretta Parte 1Documento5 pagineRelatività Ristretta Parte 1Giuseppe PoderiNessuna valutazione finora
- A) Relativismo Conoscitivo.Documento12 pagineA) Relativismo Conoscitivo.Davide CAVALERANessuna valutazione finora
- La Crisi Della Fisica Classica Planck Effetto FotoelettricoDocumento6 pagineLa Crisi Della Fisica Classica Planck Effetto Fotoelettricodavide abbattistaNessuna valutazione finora
- Architettura quantica: La lettura dell’evento architettonico in ottica quantisticaDa EverandArchitettura quantica: La lettura dell’evento architettonico in ottica quantisticaNessuna valutazione finora
- Viaggio Alla Scoperta Dell'atomoDocumento24 pagineViaggio Alla Scoperta Dell'atomoMariagraziaNessuna valutazione finora
- Tesina RelativitàDocumento19 pagineTesina RelativitàSunRiseNessuna valutazione finora
- Riflessioni Storiche Della Fisica: Da Archimede, …, Einstein A Oggi.Da EverandRiflessioni Storiche Della Fisica: Da Archimede, …, Einstein A Oggi.Nessuna valutazione finora
- Crisi ScienzaDocumento1 paginaCrisi ScienzaMatteo D’AmoreNessuna valutazione finora
- Heisemberg Yukawa TodeschiniDocumento24 pagineHeisemberg Yukawa TodeschinitonizampNessuna valutazione finora
- TesinaDocumento16 pagineTesinaMS26101992Nessuna valutazione finora
- Nicodemi Fsica QuantisticaDocumento195 pagineNicodemi Fsica QuantisticaschumangelNessuna valutazione finora
- Tes Relativita33Documento19 pagineTes Relativita33HoloTubeNessuna valutazione finora
- Fisica: fisica nucleare e delle particelleDa EverandFisica: fisica nucleare e delle particelleValutazione: 5 su 5 stelle5/5 (1)
- BREVE STORIA DEL VUOTO Prof - BaroneDocumento6 pagineBREVE STORIA DEL VUOTO Prof - BaroneNicola TancrediNessuna valutazione finora
- I Fenomini Alchemici - CrapaDocumento22 pagineI Fenomini Alchemici - Crapaillery100% (1)
- Elemen PDocumento165 pagineElemen PBerto ErtoNessuna valutazione finora
- Relativita OldDocumento35 pagineRelativita OldfranzNessuna valutazione finora
- Nicodemi PDFDocumento195 pagineNicodemi PDFJacoporealeNessuna valutazione finora
- La Teoria Della Relatività GeneraleDocumento5 pagineLa Teoria Della Relatività Generaleoikawa tooru s favorite foodNessuna valutazione finora
- Corso Di Propulsione AerospazialeDocumento411 pagineCorso Di Propulsione AerospazialeMark_DVNessuna valutazione finora
- Onde Di Materia e Onde Di ProbabilitàDocumento90 pagineOnde Di Materia e Onde Di ProbabilitàMark_DVNessuna valutazione finora
- Note Di NefrologiaDocumento141 pagineNote Di NefrologiaMark_DVNessuna valutazione finora
- Astronomia Nova N° 1 Maggio 2011Documento48 pagineAstronomia Nova N° 1 Maggio 2011Mark_DVNessuna valutazione finora
- Le Onde Di de BroglieDocumento54 pagineLe Onde Di de BroglieMark_DVNessuna valutazione finora
- Resf0101120023a PDFDocumento29 pagineResf0101120023a PDFbgiangre8372Nessuna valutazione finora
- Giornale Di Fisica 03/1999Documento61 pagineGiornale Di Fisica 03/1999Mark_DVNessuna valutazione finora
- Introduzione Alla Fisica SperimentaleDocumento107 pagineIntroduzione Alla Fisica SperimentaleMark_DVNessuna valutazione finora
- Manuale Per Reti LinuxDocumento24 pagineManuale Per Reti LinuxMark_DVNessuna valutazione finora