Potrebbero piacerti anche
- Kru SkalDocumento4 pagineKru Skalziojoe2Nessuna valutazione finora
- Problema 10 - Parte 1Documento3 pagineProblema 10 - Parte 1Gominola3010 GominolaNessuna valutazione finora
- UntitledDocumento6 pagineUntitledBianca De PandisNessuna valutazione finora
- Esercizi Base Traduzione - TestoDocumento4 pagineEsercizi Base Traduzione - TestoNoemi IemmoloNessuna valutazione finora
- Lab 2 GraficaDocumento8 pagineLab 2 GraficaPotînga SavaNessuna valutazione finora
- Tesina ASD 2Documento42 pagineTesina ASD 2GianfrancoBalzanoNessuna valutazione finora
- Le 48 Palle Del PeloDocumento41 pagineLe 48 Palle Del PeloArafaNessuna valutazione finora
- Corso Di Informatica Multimediale: Approccio Allo Sviluppo Di Giochi Utilizzando Html5 + JavascriptDocumento40 pagineCorso Di Informatica Multimediale: Approccio Allo Sviluppo Di Giochi Utilizzando Html5 + JavascriptGiorgioNessuna valutazione finora
- C++ RiassuntoDocumento5 pagineC++ RiassuntoAnnaNessuna valutazione finora
- EsempioProvaParziale 2020 2021Documento8 pagineEsempioProvaParziale 2020 2021yannbouzan2005Nessuna valutazione finora
- F (1) Pie DiabeticoDocumento7 pagineF (1) Pie Diabeticomarisol landaverdeNessuna valutazione finora
- Ass 3Documento4 pagineAss 3VikasNirgudeNessuna valutazione finora
- Serie CDocumento11 pagineSerie CMostapha AbdelmoulaNessuna valutazione finora
- Liber AbaciDocumento6 pagineLiber AbaciNeoHoodaNessuna valutazione finora
- Introduzione Al Linguaggio AssemblyDocumento34 pagineIntroduzione Al Linguaggio AssemblyDavide ValerianiNessuna valutazione finora
- Seconda Esercitazione Di NardoDocumento16 pagineSeconda Esercitazione Di Nardoleonardo adamNessuna valutazione finora
- Corso Di Informatica Multimediale: Strutturare I Dati in JavascriptDocumento43 pagineCorso Di Informatica Multimediale: Strutturare I Dati in JavascriptGiorgioNessuna valutazione finora
- Esercizi PuntatoriDocumento6 pagineEsercizi PuntatoriAndrea Dal SantoNessuna valutazione finora
- Esercizio2 ProgrammaDocumento2 pagineEsercizio2 Programmaalessio.amaroliNessuna valutazione finora
- Compito Programmazione in CDocumento4 pagineCompito Programmazione in CAlessandro VinciNessuna valutazione finora
- Ketaksmaan LinearDocumento7 pagineKetaksmaan LinearNOOR HUSNA BINTI AB. HAMID MoeNessuna valutazione finora
- Tarea N°2-Reaciion 2Documento5 pagineTarea N°2-Reaciion 2Felipe AntonioNessuna valutazione finora
- Ex6 PrestressDocumento7 pagineEx6 PrestressHector Jesus MejiaNessuna valutazione finora
- Pila StaticaDocumento2 paginePila StaticaChiaraNessuna valutazione finora
- SoluzioniDocumento5 pagineSoluzioniLeonardo CecchettoNessuna valutazione finora
- Culegere Bac MatematicaDocumento9 pagineCulegere Bac MatematicaMihai StroeNessuna valutazione finora
- Vomadegrile 2 BPCDocumento250 pagineVomadegrile 2 BPCOff FFNessuna valutazione finora
- Codigos Da Pratica 5Documento6 pagineCodigos Da Pratica 5Bibiana Lemos E. Regis SantanaNessuna valutazione finora
- Acquista Videogiochi, Console, Accessori e Merchandise GameStop ItaliaDocumento1 paginaAcquista Videogiochi, Console, Accessori e Merchandise GameStop ItaliaDaniele PolisenoNessuna valutazione finora
- Libro CilaDocumento377 pagineLibro CilaAnonymous bLHblFijEVNessuna valutazione finora
- Laporan Praktikum Algoritma IIDocumento12 pagineLaporan Praktikum Algoritma IIrahman.fa0802Nessuna valutazione finora
- Problema Regine C++Documento3 pagineProblema Regine C++Cezar DorobatNessuna valutazione finora
- Appunti C#Documento14 pagineAppunti C#AssiNessuna valutazione finora
- Esercizi Reattoristica Con SoluzioneDocumento7 pagineEsercizi Reattoristica Con SoluzioneValentino FestaNessuna valutazione finora
- ADHOC Voltaggio Device ManualDocumento2 pagineADHOC Voltaggio Device ManualEkopujiantoNessuna valutazione finora
- Grile BPC 83 PagDocumento83 pagineGrile BPC 83 PagPaul SavuNessuna valutazione finora
- Ex 4Documento4 pagineEx 4arsharm2004Nessuna valutazione finora
- Codigo Analisis CroutDocumento4 pagineCodigo Analisis CroutDiego Mauricio Mucharraz FariasNessuna valutazione finora
- Funzioni e Passaggio Per IndirizzoDocumento12 pagineFunzioni e Passaggio Per IndirizzoFlavia IserniaNessuna valutazione finora
- Seminarski AiSDocumento6 pagineSeminarski AiSAmmar KeviljNessuna valutazione finora
- Giochi Pericolosi. Teoria Dei Giochi (P. Odifreddi)Documento20 pagineGiochi Pericolosi. Teoria Dei Giochi (P. Odifreddi)Francesco OrtaleNessuna valutazione finora
- Tugas Modul 7 ARBI SOMANTRIDocumento7 pagineTugas Modul 7 ARBI SOMANTRIYoo CrhNessuna valutazione finora
- EPLAN P8 Professional - Progetto DemoDocumento173 pagineEPLAN P8 Professional - Progetto DemoSara Potter100% (1)
- Come Ripristinare Windows 10 - Salvatore AranzullaDocumento8 pagineCome Ripristinare Windows 10 - Salvatore AranzullaMarco TisoNessuna valutazione finora
- Taller 1 NaturalesDocumento6 pagineTaller 1 NaturalesCamilo TafurNessuna valutazione finora
- Codigo 1D MatlabDocumento5 pagineCodigo 1D MatlabCLAUDIO RAFAEL DA SILVANessuna valutazione finora
- Algoritmi Per La Generazione Dei Numeri Primi - WikipediaDocumento9 pagineAlgoritmi Per La Generazione Dei Numeri Primi - WikipediaginnickNessuna valutazione finora
- MaximaDocumento29 pagineMaximaRenato Di MasoNessuna valutazione finora
- Appunti Verifica TspiDocumento5 pagineAppunti Verifica TspiBrivioNessuna valutazione finora
- Sismquake HelpDocumento14 pagineSismquake Helpmat-l91Nessuna valutazione finora
- 16 Bit VedicDocumento11 pagine16 Bit VedicSandeep JaiswalNessuna valutazione finora
- Simqke Gr-Help PDFDocumento14 pagineSimqke Gr-Help PDFDiegoNessuna valutazione finora
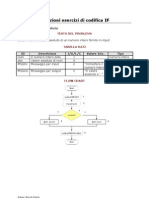
- Soluzioni Esercizi Codifica IfDocumento4 pagineSoluzioni Esercizi Codifica IfCinzia BocchiNessuna valutazione finora
- Si VamDocumento15 pagineSi Vammanjunath annigeriNessuna valutazione finora
- Client 3Documento3 pagineClient 3bull roseNessuna valutazione finora
- GestioneP StableDeltaDocumento10 pagineGestioneP StableDeltaFrancesco CartaNessuna valutazione finora
- Formulario Acquedotti e FognatureDocumento11 pagineFormulario Acquedotti e FognatureSevero StocolaNessuna valutazione finora
- Progressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Da EverandProgressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Nessuna valutazione finora
- Corvi Bonera PDFDocumento17 pagineCorvi Bonera PDFNajihah ZakariaNessuna valutazione finora
- Enpaix Efg SeriesDocumento10 pagineEnpaix Efg SeriesFernando Mar100% (1)
- KreaDocumento72 pagineKreaLeonardo FischerNessuna valutazione finora
- Blockchain (Tesi)Documento59 pagineBlockchain (Tesi)angelNessuna valutazione finora
- Regole Del Non T'arrabbiare - Mundigiochi PDFDocumento4 pagineRegole Del Non T'arrabbiare - Mundigiochi PDFdavy_7569Nessuna valutazione finora
- La Funzione Della Scuola Nella SocietaDocumento4 pagineLa Funzione Della Scuola Nella SocietaenzoarcellaNessuna valutazione finora
- Automazione 2021Documento116 pagineAutomazione 2021maria chiara pieroniNessuna valutazione finora
- Istruzioni Accesso Al Cloud - Credenziali - ImpiantiElettrici - II2019Documento7 pagineIstruzioni Accesso Al Cloud - Credenziali - ImpiantiElettrici - II2019GabrieleNessuna valutazione finora