Potrebbero piacerti anche
- FDocumento6 pagineFMatteo MeconiNessuna valutazione finora
- Call Reclutamento VPE UniversitàDocumento1 paginaCall Reclutamento VPE UniversitàMatteo MeconiNessuna valutazione finora
- Catechesi SaleDocumento1 paginaCatechesi SaleMatteo MeconiNessuna valutazione finora
- Cenone ScoutDocumento126 pagineCenone ScoutMatteo MeconiNessuna valutazione finora
- GDocumento7 pagineGMatteo MeconiNessuna valutazione finora
- RDocumento7 pagineRMatteo MeconiNessuna valutazione finora
- EDocumento1 paginaEMatteo MeconiNessuna valutazione finora
- Eventi Futuri Del 2022 10 Febbraio: Elezione Berlusconi 11 Febbraio: Berlusconi MuoreDocumento1 paginaEventi Futuri Del 2022 10 Febbraio: Elezione Berlusconi 11 Febbraio: Berlusconi MuoreMatteo MeconiNessuna valutazione finora
- Richiesta Urgente Di Rettifica Da Banca EticaDocumento1 paginaRichiesta Urgente Di Rettifica Da Banca EticaMatteo MeconiNessuna valutazione finora
- QDocumento1 paginaQMatteo MeconiNessuna valutazione finora
- UDocumento1 paginaUMatteo MeconiNessuna valutazione finora
- VDocumento9 pagineVMatteo MeconiNessuna valutazione finora
- SDocumento19 pagineSMatteo MeconiNessuna valutazione finora
- Matematico Ideale - Davis & Hersh (1248)Documento4 pagineMatematico Ideale - Davis & Hersh (1248)Matteo MeconiNessuna valutazione finora
- TDocumento7 pagineTMatteo MeconiNessuna valutazione finora
- Catechesi RouteDocumento21 pagineCatechesi RouteMatteo MeconiNessuna valutazione finora
- San FrancescoDocumento1 paginaSan FrancescoMatteo MeconiNessuna valutazione finora
- ClassificaDocumento1 paginaClassificaMatteo MeconiNessuna valutazione finora
- CandidaturaDocumento1 paginaCandidaturaMatteo MeconiNessuna valutazione finora
- L'algoritmo Di Gauss-LagrangeDocumento5 pagineL'algoritmo Di Gauss-LagrangeMatteo MeconiNessuna valutazione finora
- Risposta A Banca EticaDocumento6 pagineRisposta A Banca EticaMatteo MeconiNessuna valutazione finora
- Domande Sessualità Divise in CategorieDocumento2 pagineDomande Sessualità Divise in CategorieMatteo MeconiNessuna valutazione finora
- Contraddizioni Tra Nuovo e Antico TestamentoDocumento2 pagineContraddizioni Tra Nuovo e Antico TestamentoMatteo MeconiNessuna valutazione finora
- Confluenze, IndirizziDocumento2 pagineConfluenze, IndirizziMatteo MeconiNessuna valutazione finora
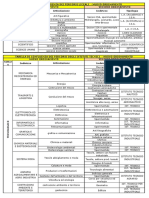
- Profili QuadriOrari Tecnici ALL B C To DefinitivoDocumento28 pagineProfili QuadriOrari Tecnici ALL B C To DefinitivoplbzNessuna valutazione finora
- Linee Guida Iscrizioni 2012 - 2013Documento30 pagineLinee Guida Iscrizioni 2012 - 2013Matteo MeconiNessuna valutazione finora
- Proiettivo 14Documento60 pagineProiettivo 14Matteo MeconiNessuna valutazione finora
- COPERTINADocumento1 paginaCOPERTINAMatteo MeconiNessuna valutazione finora
- PECUP Istituti TecniciDocumento6 paginePECUP Istituti TecniciRoberto RaimondiNessuna valutazione finora
- Atti Nsa-Modena2012Documento89 pagineAtti Nsa-Modena2012Matteo MeconiNessuna valutazione finora