Potrebbero piacerti anche
- Alle Porte Di Citta Alta Bergamo e I ColliDocumento3 pagineAlle Porte Di Citta Alta Bergamo e I ColliAnonymous zxFhXenNessuna valutazione finora
- Capitolo7 PDFDocumento62 pagineCapitolo7 PDFAnonymous zxFhXenNessuna valutazione finora
- ITS TECNOLOGIE - Classificazione Dei Materiali Da CostruzioneDocumento32 pagineITS TECNOLOGIE - Classificazione Dei Materiali Da CostruzioneAnonymous zxFhXenNessuna valutazione finora
- Boccole Italia Catalogo GeneraleDocumento30 pagineBoccole Italia Catalogo GeneraleAnonymous zxFhXenNessuna valutazione finora
- FIBRA TIM-QG-SmartModem-Technicolor-A5-2016-3-17Documento13 pagineFIBRA TIM-QG-SmartModem-Technicolor-A5-2016-3-17Anonymous zxFhXenNessuna valutazione finora
- Viti Di Movimentazione e Carico Catalogo-ITDocumento80 pagineViti Di Movimentazione e Carico Catalogo-ITAnonymous zxFhXenNessuna valutazione finora
- MINUTERIA METALLICA BUSSOLE INSERTI PER STAMPI Catalogo - RCM PDFDocumento315 pagineMINUTERIA METALLICA BUSSOLE INSERTI PER STAMPI Catalogo - RCM PDFAnonymous zxFhXenNessuna valutazione finora
- AUTOMOBILI Cambio Di Velocità Manuale 18-2-05Documento70 pagineAUTOMOBILI Cambio Di Velocità Manuale 18-2-05Anonymous zxFhXen100% (1)
- Apparecchi-Sollevamento Gestione Secondo UNI en 13155Documento67 pagineApparecchi-Sollevamento Gestione Secondo UNI en 13155Anonymous zxFhXenNessuna valutazione finora
- Avira Antivirus Pro - Procedura Di InstallazioneDocumento7 pagineAvira Antivirus Pro - Procedura Di InstallazioneAnonymous zxFhXenNessuna valutazione finora
- Angst+Pfister Catalogo Tecnica Vibrazioni Dlit300412163847Documento409 pagineAngst+Pfister Catalogo Tecnica Vibrazioni Dlit300412163847Anonymous zxFhXenNessuna valutazione finora
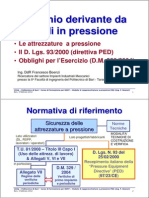
- Attrezzature A Pressione PEDDocumento34 pagineAttrezzature A Pressione PEDAnonymous zxFhXenNessuna valutazione finora
- Donati Classificazione Degli Apparecchi Di SollevamentoDocumento16 pagineDonati Classificazione Degli Apparecchi Di SollevamentoAnonymous zxFhXenNessuna valutazione finora
- Ingenio Scaffali Scaffalature MetallicheDocumento5 pagineIngenio Scaffali Scaffalature MetallicheAnonymous zxFhXenNessuna valutazione finora
- Tabella Ims Inox Astm Aisi 304l En1.4307Documento1 paginaTabella Ims Inox Astm Aisi 304l En1.4307Anonymous zxFhXenNessuna valutazione finora
- CNR 10021 - 85 Apparecchiature Sollevamento Istruz. CalcoloDocumento14 pagineCNR 10021 - 85 Apparecchiature Sollevamento Istruz. CalcoloAnonymous zxFhXenNessuna valutazione finora
- Il Panorama Normativo Delle Scaffalature Metalliche - La Situazione AttualeDocumento2 pagineIl Panorama Normativo Delle Scaffalature Metalliche - La Situazione AttualeAnonymous zxFhXenNessuna valutazione finora
- INGENIO - Scaffalature e Sisma - 04 06 12Documento6 pagineINGENIO - Scaffalature e Sisma - 04 06 12Anonymous zxFhXenNessuna valutazione finora
- Scaffalature e Soppalchi Metallici - ManualeDocumento16 pagineScaffalature e Soppalchi Metallici - ManualeAnonymous zxFhXenNessuna valutazione finora
- Capitolo1 Agrati Viti Manuale TecnicoDocumento7 pagineCapitolo1 Agrati Viti Manuale TecnicoAnonymous zxFhXen100% (1)
- CorsoZigbee Completo (ITA)Documento33 pagineCorsoZigbee Completo (ITA)southerliesNessuna valutazione finora
- PLC AblyDocumento72 paginePLC AblyRoberto EmmeNessuna valutazione finora
- Electrolux-Rex TT08E DishwasherDocumento20 pagineElectrolux-Rex TT08E DishwasherMattia PasquiniNessuna valutazione finora
- (Ebook - Ingegneria - ITA) - Norme UNI Disegno TecnicoDocumento11 pagine(Ebook - Ingegneria - ITA) - Norme UNI Disegno TecnicoLorenzo RiscicaNessuna valutazione finora
- Come Limitare L'accesso Ad Internet - Salvatore AranzullaDocumento3 pagineCome Limitare L'accesso Ad Internet - Salvatore AranzullaRudj GinanneschiNessuna valutazione finora
- DH Advanced Bestiario 8Documento390 pagineDH Advanced Bestiario 8Emanuele Monk Soriano100% (1)
- Arizona, Utah & New Mexico: A Guide to the State & National ParksDa EverandArizona, Utah & New Mexico: A Guide to the State & National ParksValutazione: 4 su 5 stelle4/5 (1)
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoDa EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoValutazione: 5 su 5 stelle5/5 (1)
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptDa EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptValutazione: 5 su 5 stelle5/5 (1)
- The Bahamas a Taste of the Islands ExcerptDa EverandThe Bahamas a Taste of the Islands ExcerptValutazione: 4 su 5 stelle4/5 (1)