Potrebbero piacerti anche
- 2.1motore Sincrono A Magneti PermanentiDocumento23 pagine2.1motore Sincrono A Magneti PermanentiFedericaNessuna valutazione finora
- Macchina Sincrona A Magneti Permanenti Dispense - BLDC 2006-07 PDFDocumento29 pagineMacchina Sincrona A Magneti Permanenti Dispense - BLDC 2006-07 PDFzizu1234Nessuna valutazione finora
- L'Equazione di Majorana - Steampunk Zeidos volume settimoDa EverandL'Equazione di Majorana - Steampunk Zeidos volume settimoNessuna valutazione finora
- Motore MagneticDocumento9 pagineMotore MagneticLead Z̶e̶l̶a̶t̶o̶r̶Nessuna valutazione finora
- Scopri i segreti di 40 carriere di Successo - volume IIDa EverandScopri i segreti di 40 carriere di Successo - volume IINessuna valutazione finora
- Ottenere Energia Libera ScientificamenteDocumento14 pagineOttenere Energia Libera ScientificamenteliberomaurizioNessuna valutazione finora
- Il linguaggio del cuore e il potere delle emozioniDa EverandIl linguaggio del cuore e il potere delle emozioniNessuna valutazione finora
- La Marcia su Roma: Scritti e discorsi degli anni 1921-1922Da EverandLa Marcia su Roma: Scritti e discorsi degli anni 1921-1922Nessuna valutazione finora
- Indagine sulla vera genesi dei fenomeni medianiciDa EverandIndagine sulla vera genesi dei fenomeni medianiciNessuna valutazione finora
- Spagnolo Per Italiani (Stories Brevi Per Principianti): 50 racconti con dialoghi bilingue e immagini di Koala per imparare lo spagnolo in modo divertenteDa EverandSpagnolo Per Italiani (Stories Brevi Per Principianti): 50 racconti con dialoghi bilingue e immagini di Koala per imparare lo spagnolo in modo divertenteNessuna valutazione finora
- Internet e nuove tecnologie: non tutto è quello che sembraDa EverandInternet e nuove tecnologie: non tutto è quello che sembraNessuna valutazione finora
- Cibi AlcalinizzantiDocumento8 pagineCibi AlcalinizzantimerdsantNessuna valutazione finora
- Bobina Di Tesla - Come Costruirla - WikihowDocumento5 pagineBobina Di Tesla - Come Costruirla - WikihowValentina CiattiNessuna valutazione finora
- Libro dei Sogni. Nuova Smorfia illustrata, responso e numeri: 450 Simboli disegnati a mano e interpretazione augurale. Ampia sezione storica. Gioco di ruolo, tabellone stampabile e regolamentoDa EverandLibro dei Sogni. Nuova Smorfia illustrata, responso e numeri: 450 Simboli disegnati a mano e interpretazione augurale. Ampia sezione storica. Gioco di ruolo, tabellone stampabile e regolamentoNessuna valutazione finora
- Spagnolo Per Italiani - Imparare lo Spagnolo e Aiuta a Salvare gli Elefanti: Stories Brevi Per Principianti - Testi bilingue e immagini per conoscere e fare di piùDa EverandSpagnolo Per Italiani - Imparare lo Spagnolo e Aiuta a Salvare gli Elefanti: Stories Brevi Per Principianti - Testi bilingue e immagini per conoscere e fare di piùNessuna valutazione finora
- Vegan Revolution: Quello che non ti è mai stato detto sul VeganismoDa EverandVegan Revolution: Quello che non ti è mai stato detto sul VeganismoNessuna valutazione finora
- Nicola Tesla Un Genio Dimenticato in ItaliaDocumento13 pagineNicola Tesla Un Genio Dimenticato in ItaliaIgor Medeot DiazNessuna valutazione finora
- I "fantastici" mondi dei bambini: non solo Harry PotterDa EverandI "fantastici" mondi dei bambini: non solo Harry PotterNessuna valutazione finora
- L'origine dell'Islam: sogno di una teocrazia universale: Storia, dottrina, istituzioni, arte e letteraturaDa EverandL'origine dell'Islam: sogno di una teocrazia universale: Storia, dottrina, istituzioni, arte e letteraturaNessuna valutazione finora
- Astrologia cinese. L’oroscopo cinese tradizionale e i suoi 12 animali.Da EverandAstrologia cinese. L’oroscopo cinese tradizionale e i suoi 12 animali.Nessuna valutazione finora
- L'Ultima Beffa Del Principe Nero: Italia MisteriosaDocumento8 pagineL'Ultima Beffa Del Principe Nero: Italia MisteriosatraditurNessuna valutazione finora
- Scrivere narrativa 5 - Presentarsi agli editori: Scrivere narrativa 5Da EverandScrivere narrativa 5 - Presentarsi agli editori: Scrivere narrativa 5Nessuna valutazione finora
- Il TrasformatoreDocumento14 pagineIl TrasformatoreWilliamMorigiNessuna valutazione finora
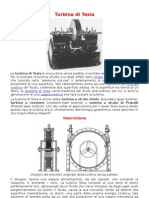
- Turbina Di TeslaDocumento3 pagineTurbina Di TeslaEmiliano ZampellaNessuna valutazione finora
- Cartomanzia Pratica per Tutti (seconda edizione)Da EverandCartomanzia Pratica per Tutti (seconda edizione)Nessuna valutazione finora
- Tutto quello che devi sapere per pubblicare (e vendere) il tuo e-book - Guida al self-publishingDa EverandTutto quello che devi sapere per pubblicare (e vendere) il tuo e-book - Guida al self-publishingValutazione: 5 su 5 stelle5/5 (1)
- Svelato Il Mistero Del Triangolo Delle BermudaDocumento3 pagineSvelato Il Mistero Del Triangolo Delle Bermudagiorgio802000Nessuna valutazione finora
- Agricoltura Naturale Di FukuokaDocumento8 pagineAgricoltura Naturale Di FukuokaclonazzyoNessuna valutazione finora
- SELI - Shelter - CompressedDocumento14 pagineSELI - Shelter - CompressedAscencio RubenNessuna valutazione finora
- Il GGG Testo e Esercizi PDFDocumento4 pagineIl GGG Testo e Esercizi PDFElisa LubianoNessuna valutazione finora
- Documenti Seduta LaureaDocumento6 pagineDocumenti Seduta LaureajenNessuna valutazione finora
- Corrado Malanga - I FENOMENI BVMDocumento85 pagineCorrado Malanga - I FENOMENI BVMNannai02100% (2)
- L'organizzazione Del Corpo UmanoDocumento8 pagineL'organizzazione Del Corpo UmanoOlga ValloneNessuna valutazione finora
- CatalogoDocumento68 pagineCatalogopercorsielmarNessuna valutazione finora
- Una Curiosa Razza. Le Jenny-Haniver Nei Quadri Di Bosch e Nei Cabinets e WurderkammernDocumento9 pagineUna Curiosa Razza. Le Jenny-Haniver Nei Quadri Di Bosch e Nei Cabinets e WurderkammernAlessandro E.M. PisaniNessuna valutazione finora