Potrebbero piacerti anche
- La Fisica Della VelaDocumento5 pagineLa Fisica Della Velapasser40Nessuna valutazione finora
- Costruzioni in Acciaio Carico Di Punta Aste ComposteDocumento18 pagineCostruzioni in Acciaio Carico Di Punta Aste CompostebeppeNessuna valutazione finora
- Analisi Di Pushover 3D Per Strutture in C.A. - Ing. Maurizio SerpieriDocumento497 pagineAnalisi Di Pushover 3D Per Strutture in C.A. - Ing. Maurizio SerpieriIng. Maurizio SerpieriNessuna valutazione finora
- Dispense Meccanica Delle StruttureDocumento43 pagineDispense Meccanica Delle StruttureFrancesca SartiniNessuna valutazione finora
- Validazione CDSDocumento98 pagineValidazione CDSbrusco19Nessuna valutazione finora
- Calcolo Camino AutoportanteDocumento31 pagineCalcolo Camino AutoportanteAndrea BarbieriNessuna valutazione finora
- Esercizi Sulla Statica - 1Documento4 pagineEsercizi Sulla Statica - 1Luca LopezNessuna valutazione finora
- Problemi Di ContattoDocumento25 pagineProblemi Di ContattoFrancescoSciuscoNessuna valutazione finora
- Programma Di Meccanica Razionale (9 Cfu)Documento2 pagineProgramma Di Meccanica Razionale (9 Cfu)CarmelaNessuna valutazione finora
- Statica Punto MaterialeDocumento2 pagineStatica Punto MaterialeMario De Simoni100% (1)
- Lezione 16b (Esempio Guyon-Massonnet-Bares)Documento47 pagineLezione 16b (Esempio Guyon-Massonnet-Bares)Fabrizio BisernaNessuna valutazione finora
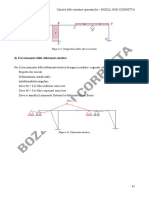
- D) Tracciamento Della Deformata Elastica: Figura 13: Diagramma Dello Sforzo NormaleDocumento28 pagineD) Tracciamento Della Deformata Elastica: Figura 13: Diagramma Dello Sforzo NormaleGiovanniNessuna valutazione finora
- Slides Di DinamicaDocumento50 pagineSlides Di DinamicaCesare AngeliNessuna valutazione finora
- Scienza Delle Costruzioni - 03 - Travi Rigide PianeDocumento23 pagineScienza Delle Costruzioni - 03 - Travi Rigide PianeSolid01Nessuna valutazione finora
- Schemi NotevoliDocumento7 pagineSchemi NotevoliRobertoNessuna valutazione finora
- Principi Di ModellazioneDocumento142 paginePrincipi Di ModellazioneAnna FrignaniNessuna valutazione finora
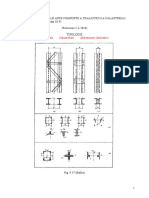
- Tipologie Unioni in Acciaio Bullonate e SaldateDocumento5 pagineTipologie Unioni in Acciaio Bullonate e SaldatejkklflNessuna valutazione finora