Potrebbero piacerti anche
- Virgo-Fidelis-Partitura 4 Voci GarbiniDocumento5 pagineVirgo-Fidelis-Partitura 4 Voci Garbinilorenzodalpont21450% (2)
- Ave Maria Biebl 3 PDFDocumento4 pagineAve Maria Biebl 3 PDFMichel Fernando ZattaNessuna valutazione finora
- Un Bacio A MezzanotteDocumento3 pagineUn Bacio A Mezzanottelorenzodalpont2145Nessuna valutazione finora
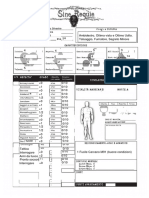
- Sine Requie EditabileDocumento1 paginaSine Requie EditabileMitic93Nessuna valutazione finora
- Madre Di DioDocumento1 paginaMadre Di Diolorenzodalpont2145Nessuna valutazione finora
- Litanie Dei Santi - PragliaDocumento1 paginaLitanie Dei Santi - Praglialorenzodalpont2145100% (1)
- Un Segno GrandiosoDocumento7 pagineUn Segno Grandiosolorenzodalpont21450% (1)
- Convegno Cori 2010Documento23 pagineConvegno Cori 2010lorenzodalpont2145Nessuna valutazione finora
- Dammi La Man BiondinaDocumento2 pagineDammi La Man BiondinanerooruNessuna valutazione finora
- Appunti Topografia-Idoneità-4°Documento43 pagineAppunti Topografia-Idoneità-4°salvoNessuna valutazione finora
- Pragmatica Della Comunicazione Umana Processi e Dinamiche Di GruppoDocumento35 paginePragmatica Della Comunicazione Umana Processi e Dinamiche Di GruppoChiara BreciNessuna valutazione finora
- Psicologia Sociale - L'aggressivitàDocumento10 paginePsicologia Sociale - L'aggressivitàMatteoRagneddaNessuna valutazione finora