Potrebbero piacerti anche
- Bienes - Hernan CorralDocumento635 pagineBienes - Hernan CorralBelen Ojeda Aburto50% (2)
- Caso Singapur AirlinesDocumento22 pagineCaso Singapur AirlinesLalo Falcón69% (13)
- Cálculo de Bobinado de Motores de Corriente AlternaDocumento45 pagineCálculo de Bobinado de Motores de Corriente AlternaJosé Antonio Curado Escoz87% (55)
- Fifty Greatest Magic Tricks - SpanishDocumento52 pagineFifty Greatest Magic Tricks - SpanishJosé Antonio Curado Escoz100% (2)
- Grafcet Taladro CIDA1415Documento1 paginaGrafcet Taladro CIDA1415davidchimboteNessuna valutazione finora
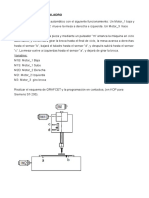
- AP3. SMR2. Montaje y Desarrollo de Un Detector Inductivo de 3 HilosDocumento1 paginaAP3. SMR2. Montaje y Desarrollo de Un Detector Inductivo de 3 HilosPatriciaBlázquezGarcíaNessuna valutazione finora
- Prt6 Automatismos - Uso de Guía Gemma LogoDocumento4 paginePrt6 Automatismos - Uso de Guía Gemma LogopaKoSTeNessuna valutazione finora
- Comunicaciones DDEDocumento2 pagineComunicaciones DDEKarlita Nuñez100% (1)
- 0910 Soluciones para FormacionDocumento96 pagine0910 Soluciones para FormacionEnergy Sun BiocarNessuna valutazione finora
- Modulob Tema2 Parte2Documento4 pagineModulob Tema2 Parte2Anonymous 4m0gtOZranNessuna valutazione finora
- PPTGrafcetBasico 050319Documento78 paginePPTGrafcetBasico 050319josemusic23Nessuna valutazione finora
- GRAPH v1 6Documento50 pagineGRAPH v1 6Freddy Javier Orbes0% (1)
- Ut1 22-23 Planificacion de La Instalacion de Un Sistema AutomaticoDocumento52 pagineUt1 22-23 Planificacion de La Instalacion de Un Sistema AutomaticoANANessuna valutazione finora
- Ejemplo Automatización MezclaDocumento26 pagineEjemplo Automatización MezclakarlitoxrNessuna valutazione finora
- Información y Estado de Los Controladores Logix5000Documento56 pagineInformación y Estado de Los Controladores Logix5000Erik Jacome0% (1)
- Grafcet&GemmaDocumento23 pagineGrafcet&GemmaVictor CarlosNessuna valutazione finora
- Lenguaje s7 GraphDocumento30 pagineLenguaje s7 GraphJulioNessuna valutazione finora
- PLC Cap1Documento13 paginePLC Cap1Genesis Toledo100% (1)
- Control InteligenteDocumento185 pagineControl InteligenteMarcos Crisostomo100% (2)
- Control de Nivel Usando El PLC Siemens12Documento14 pagineControl de Nivel Usando El PLC Siemens12franco_3210_100% (1)
- Guía 1 - Cómo Dar Forma A Proyectos de AutomatizaciónDocumento3 pagineGuía 1 - Cómo Dar Forma A Proyectos de Automatizaciónfranko sanhuezaNessuna valutazione finora
- Bases de Datos Activas IIDocumento23 pagineBases de Datos Activas IIDaniel FrcNessuna valutazione finora
- Sistemas de Control Automático Documentos Escritos de Consulta 2019 - IIDocumento3 pagineSistemas de Control Automático Documentos Escritos de Consulta 2019 - IIIsabella Perez GarciaNessuna valutazione finora
- Control PID TIA PORTAL 1Documento12 pagineControl PID TIA PORTAL 1Manuel Garcia Suarez100% (1)
- PLCS, Programación Lineal y Estructurada (Step7 Siemens)Documento4 paginePLCS, Programación Lineal y Estructurada (Step7 Siemens)Nazy rebolledoNessuna valutazione finora
- Niveles de AutomatizaciónDocumento13 pagineNiveles de AutomatizaciónManuel Santiago GonzalesNessuna valutazione finora
- Protocolos de Comunicaciones IndustrialesDocumento9 pagineProtocolos de Comunicaciones IndustrialesErick Fernando RivasNessuna valutazione finora
- Manual PLC S7200 PDFDocumento51 pagineManual PLC S7200 PDFPabloCrucesNessuna valutazione finora
- 04 ProfibusDocumento208 pagine04 ProfibusOmar AlfaroNessuna valutazione finora
- Altivar 312Documento6 pagineAltivar 312Carlos Avila MiguelNessuna valutazione finora
- EP-2017-2 - Solucion-3Documento5 pagineEP-2017-2 - Solucion-3Ronald Soto DiazNessuna valutazione finora
- Practica 22 Gemma PLC NRC EquipoDocumento17 paginePractica 22 Gemma PLC NRC EquipoMarlØn TeránNessuna valutazione finora
- Diseño e Implementación Del Sistema de Automatización de Una Línea de Recicloneo en Planta Concen PDFDocumento143 pagineDiseño e Implementación Del Sistema de Automatización de Una Línea de Recicloneo en Planta Concen PDFAigner VC PradoNessuna valutazione finora
- Practica 9 Completa PDFDocumento22 paginePractica 9 Completa PDFManuel De Jesus ValenzuelaNessuna valutazione finora
- Practica 32Documento34 paginePractica 32Andres KtuNessuna valutazione finora
- Ejercicios GrafcetDocumento2 pagineEjercicios Grafcetramiro11062011Nessuna valutazione finora
- S7 200Documento10 pagineS7 200cbetancourth_35Nessuna valutazione finora
- infoPLC Net Guia 3 Instrucciones Basicas en Los Automatas ProgramablesDocumento19 pagineinfoPLC Net Guia 3 Instrucciones Basicas en Los Automatas Programablesfuente perezNessuna valutazione finora
- infoPLC Net Proyecto Final FullDocumento110 pagineinfoPLC Net Proyecto Final FullCarlos GranceNessuna valutazione finora
- Metodo Paso A PasoDocumento10 pagineMetodo Paso A PasoYuritzi GuarnerosNessuna valutazione finora
- Controladores AutosintonizablesDocumento24 pagineControladores AutosintonizablesJose Antonio PinGlo MarkzNessuna valutazione finora
- Ejercicio Mezclador AlimentDocumento3 pagineEjercicio Mezclador Alimentkamal100% (1)
- S7-GRAPH - Primeros Pasos Con S7-GRAPH PDFDocumento24 pagineS7-GRAPH - Primeros Pasos Con S7-GRAPH PDFIzengorriaNessuna valutazione finora
- SCADADocumento6 pagineSCADAedwinNessuna valutazione finora
- Traduccion VirtualmarkTCPDocumento4 pagineTraduccion VirtualmarkTCPFrancisco MendozaNessuna valutazione finora
- Contador y Temporizador PLCDocumento38 pagineContador y Temporizador PLCJose Urpeque CastilloNessuna valutazione finora
- Automatización Con PLCDocumento41 pagineAutomatización Con PLCHector Quin CelizNessuna valutazione finora
- Programacion Basica Del PLCDocumento14 pagineProgramacion Basica Del PLCBrian Ubillús RodríguezNessuna valutazione finora
- PWM s7-300Documento6 paginePWM s7-300Juan Fernando CarmonaNessuna valutazione finora
- Escalado Variables AnalogasDocumento12 pagineEscalado Variables AnalogasHerman ArocaNessuna valutazione finora
- 02 Ejemplo SCL Reg - Temp - ArrayDocumento6 pagine02 Ejemplo SCL Reg - Temp - ArrayJose Manuel Moa PerezNessuna valutazione finora
- Ejemplos de Lazo Abierto y Lazo CerradoDocumento7 pagineEjemplos de Lazo Abierto y Lazo CerradoJair Hazael Hernandez Gomez100% (1)
- Laboratorio 1PLCDocumento3 pagineLaboratorio 1PLCJaviier Koo100% (1)
- Encoder de Velocidad Practica 2Documento8 pagineEncoder de Velocidad Practica 2Daniel Alejandro SandovalNessuna valutazione finora
- Método Cascada NeumáticaDocumento9 pagineMétodo Cascada NeumáticaVíctor CruzNessuna valutazione finora
- RS MK - II Español..Documento20 pagineRS MK - II Español..Fernando Javier LeivaNessuna valutazione finora
- Segundo Reporte de Trabajo PLCDocumento59 pagineSegundo Reporte de Trabajo PLCFabian AlfonsoNessuna valutazione finora
- Anatomía de Un Sistema de Control de FeedbackDocumento17 pagineAnatomía de Un Sistema de Control de FeedbackFrancisco MendozaNessuna valutazione finora
- Practica1 Control-Ajuste y Sintonizacion Controles PDFDocumento6 paginePractica1 Control-Ajuste y Sintonizacion Controles PDFrdelgranadoNessuna valutazione finora
- Controladores Tema 3 Instrumentacion y ControlDocumento30 pagineControladores Tema 3 Instrumentacion y ControlheidypreciadoalvarezNessuna valutazione finora
- Sintonización de ControladoresDocumento7 pagineSintonización de Controladoresvictorino.cr02Nessuna valutazione finora
- Control Integral - Mas Detalles Imprescindibles PDFDocumento5 pagineControl Integral - Mas Detalles Imprescindibles PDFEfrain Juan Ticona CondoriNessuna valutazione finora
- Trabajo Semana 7 Unidad 3 Fundamentos de Lazo de ControlDocumento17 pagineTrabajo Semana 7 Unidad 3 Fundamentos de Lazo de ControlElliot PormaNessuna valutazione finora
- APLICACIONES Pid UltimoDocumento7 pagineAPLICACIONES Pid UltimoSaxobeat Nicolas BartoNessuna valutazione finora
- Aceites LubricantesDocumento9 pagineAceites LubricantesCésar Manuel Linch PeñaNessuna valutazione finora
- Curso de Ukelele - Teoria (2014)Documento4 pagineCurso de Ukelele - Teoria (2014)gersonchecho67% (3)
- Guitarra Fast TrackDocumento32 pagineGuitarra Fast Tracksagz3000100% (3)
- Familia CmosDocumento12 pagineFamilia CmosErnestoValdez100% (12)
- Mecánica BicicletasDocumento31 pagineMecánica BicicletasHugo Valentino Gonzalez CifuentesNessuna valutazione finora
- Manual en Español Canon 1200DDocumento342 pagineManual en Español Canon 1200Dkum111Nessuna valutazione finora
- Orbea Alma h30 AF - Manual - Usuario PDFDocumento196 pagineOrbea Alma h30 AF - Manual - Usuario PDFCAGERIGO0% (1)
- Curso de Fotografia DigitalDocumento140 pagineCurso de Fotografia DigitalJuliaPestarino100% (2)
- La Constitucion Espanola en Lectura FacilDocumento112 pagineLa Constitucion Espanola en Lectura FacilLeroy Madden100% (1)
- Marpol 73-78Documento118 pagineMarpol 73-78José Antonio Curado EscozNessuna valutazione finora
- Control de Un ServotimónDocumento3 pagineControl de Un ServotimónJosé Antonio Curado EscozNessuna valutazione finora
- Electromecanica de Vehiculos. SEVILLADocumento33 pagineElectromecanica de Vehiculos. SEVILLAJosé Antonio Curado EscozNessuna valutazione finora
- Calculo Espesor CableDocumento7 pagineCalculo Espesor CableJosé Antonio Curado EscozNessuna valutazione finora
- DocumentoDocumento1 paginaDocumentoJosé Antonio Curado EscozNessuna valutazione finora
- Corriente AlternaDocumento13 pagineCorriente AlternaJosé Antonio Curado EscozNessuna valutazione finora
- Controlador Temperatura OmronDocumento42 pagineControlador Temperatura OmronJosé Antonio Curado EscozNessuna valutazione finora
- Shaily Vargas 1 Análisis de Caso Sobre Estructura Organizacional. Act. 4 EvaluativaDocumento4 pagineShaily Vargas 1 Análisis de Caso Sobre Estructura Organizacional. Act. 4 EvaluativaShaily Shakid VARGAS DELGADONessuna valutazione finora
- Trabajo Final Ingri 2Documento28 pagineTrabajo Final Ingri 2SailethNessuna valutazione finora
- II. Diagnóstico de EVC Agudo e ImitadoresDocumento20 pagineII. Diagnóstico de EVC Agudo e ImitadoresFanny Rubí Vargas ZamarripaNessuna valutazione finora
- 4111 UsoDocumento2 pagine4111 UsoWitchfinder GeneralNessuna valutazione finora
- Encofrados Deslizantes-InformeDocumento29 pagineEncofrados Deslizantes-InformeElvis Edgar Vera Regalado67% (3)
- Certificado de DefuncionDocumento4 pagineCertificado de DefuncionJesus CoronadoNessuna valutazione finora
- Anexo-A NUESTRO PADRE CREADOR TÚPAC AMARUDocumento3 pagineAnexo-A NUESTRO PADRE CREADOR TÚPAC AMARUabrahanmauriciosahuaNessuna valutazione finora
- Calendario Académico 2° Semestre 2022 (Estudiantes)Documento1 paginaCalendario Académico 2° Semestre 2022 (Estudiantes)ROLANDO RUBÉN OSORIONessuna valutazione finora
- Curso PenduloDocumento76 pagineCurso Penduloanboto367% (3)
- Comision 3BDocumento4 pagineComision 3BMary H AlvaradoNessuna valutazione finora
- Meliso de SamosDocumento2 pagineMeliso de SamosBelen Florencia Milagros RamosNessuna valutazione finora
- Abp Sobre Habilidades ComunicativasDocumento19 pagineAbp Sobre Habilidades ComunicativasPamela Männer LehmwandNessuna valutazione finora
- Muñoz Castillo Karina MilagrosDocumento75 pagineMuñoz Castillo Karina Milagrosyurialarcon48Nessuna valutazione finora
- Ultrasonografía VeterinariaDocumento187 pagineUltrasonografía VeterinariaDavid Noriega Bravo0% (1)
- 2 Valoración de La Prueba PericialDocumento16 pagine2 Valoración de La Prueba PericialMonica SteffanyNessuna valutazione finora
- Clase Cs Naturales Semana 21Documento18 pagineClase Cs Naturales Semana 21Paola Alejandra Silva CubillosNessuna valutazione finora
- TripticoDocumento3 pagineTripticoISAIAS JOEL HURTADO SANTA CRUZNessuna valutazione finora
- Formato Boleta BásicaDocumento2 pagineFormato Boleta BásicanuensimonbolivarzpNessuna valutazione finora
- Cotizacion #2556 - 2023 - FRG Farms S.A.C. PDFDocumento1 paginaCotizacion #2556 - 2023 - FRG Farms S.A.C. PDFJorge Alexander Regalado MacedoNessuna valutazione finora
- Las Colecciones de Objetos Workbooks y WorksheetsDocumento3 pagineLas Colecciones de Objetos Workbooks y Worksheetsjose guevaraNessuna valutazione finora
- Obesidad InfantilDocumento10 pagineObesidad InfantilYONE LENINNessuna valutazione finora
- Senasag BPM CaincoDocumento35 pagineSenasag BPM CaincoKaren SoledadNessuna valutazione finora
- Ica Calderon Baiocchi Lino Francisco An Cultura Artistica Continua 111Documento4 pagineIca Calderon Baiocchi Lino Francisco An Cultura Artistica Continua 111Marcos AntonioNessuna valutazione finora
- Ficha 2 - Segundo Año - Fiesta de Todos Los SantosDocumento4 pagineFicha 2 - Segundo Año - Fiesta de Todos Los SantosNelly OrmeñoNessuna valutazione finora
- Mallas Certus Semipresencial GESDocumento1 paginaMallas Certus Semipresencial GESDARWWIN MARTIN PUSE BENITESNessuna valutazione finora
- 2-Cartilla de Ejercicios Condicionales - Informatica 1 - Elecctronica - UTN - FRSNDocumento2 pagine2-Cartilla de Ejercicios Condicionales - Informatica 1 - Elecctronica - UTN - FRSNkamote_fritoNessuna valutazione finora
- Las DrogasDocumento5 pagineLas DrogasTiffany DiazNessuna valutazione finora
- Ensayo Procesos ContructivosDocumento10 pagineEnsayo Procesos ContructivosLeonardo TorresNessuna valutazione finora