Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Skype Sex - Date of Birth - Nationality: Curriculum VitaeDocumento4 pagineSkype Sex - Date of Birth - Nationality: Curriculum VitaeSasa DjurasNessuna valutazione finora
- Special Proceedings Case DigestDocumento14 pagineSpecial Proceedings Case DigestDyan Corpuz-Suresca100% (1)
- Principles of Marketing Eighth Edition Philip Kotler and Gary ArmstrongDocumento17 paginePrinciples of Marketing Eighth Edition Philip Kotler and Gary ArmstrongJunaid KhalidNessuna valutazione finora
- Solution of Introduction To Many-Body Quantum Theory in Condensed Matter Physics (H.Bruus & K. Flensberg)Documento54 pagineSolution of Introduction To Many-Body Quantum Theory in Condensed Matter Physics (H.Bruus & K. Flensberg)Calamanciuc Mihai MadalinNessuna valutazione finora
- Gas Chromatography - COLIN F. POOLE 2012 PDFDocumento743 pagineGas Chromatography - COLIN F. POOLE 2012 PDFVo Manh Tien100% (1)
- Effects of War On EconomyDocumento7 pagineEffects of War On Economyapi-3721555100% (1)
- Saurabh KumarDocumento3 pagineSaurabh KumarSaurabh JaiswalNessuna valutazione finora
- Assignment FileDocumento2 pagineAssignment FileSaurabh JaiswalNessuna valutazione finora
- Structures For Discrete-Time Systems - 2Documento21 pagineStructures For Discrete-Time Systems - 2Akram Sarrawy100% (1)
- Weighted Pseudo RandomDocumento32 pagineWeighted Pseudo RandomSaurabh JaiswalNessuna valutazione finora
- Implementing Vector Quantization Using Content Addressable Memory ArchitectureDocumento14 pagineImplementing Vector Quantization Using Content Addressable Memory ArchitectureSaurabh JaiswalNessuna valutazione finora
- Amma dedicates 'Green Year' to environmental protection effortsDocumento22 pagineAmma dedicates 'Green Year' to environmental protection effortsOlivia WilliamsNessuna valutazione finora
- Nysc Editorial ManifestoDocumento2 pagineNysc Editorial ManifestoSolomon Samuel AdetokunboNessuna valutazione finora
- Biotechnology Eligibility Test (BET) For DBT-JRF Award (2010-11)Documento20 pagineBiotechnology Eligibility Test (BET) For DBT-JRF Award (2010-11)Nandakumar HaorongbamNessuna valutazione finora
- Contract To Sell LansanganDocumento2 pagineContract To Sell LansanganTet BuanNessuna valutazione finora
- 6a. ICMR STSDocumento15 pagine6a. ICMR STSVishnu Praba ANessuna valutazione finora
- Principal Component Analysis of Protein DynamicsDocumento5 paginePrincipal Component Analysis of Protein DynamicsmnstnNessuna valutazione finora
- Introduction To Global Positioning System: Anil Rai I.A.S.R.I., New Delhi - 110012Documento19 pagineIntroduction To Global Positioning System: Anil Rai I.A.S.R.I., New Delhi - 110012vinothrathinamNessuna valutazione finora
- tsb16 0008 PDFDocumento1 paginatsb16 0008 PDFCandy QuailNessuna valutazione finora
- C++ Programmierung (Benjamin Buch, Wikibooks - Org)Documento257 pagineC++ Programmierung (Benjamin Buch, Wikibooks - Org)stefano rossiNessuna valutazione finora
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerDocumento31 pagineThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloNessuna valutazione finora
- Past Paper Booklet - QPDocumento506 paginePast Paper Booklet - QPMukeshNessuna valutazione finora
- North American Countries ListDocumento4 pagineNorth American Countries ListApril WoodsNessuna valutazione finora
- Mono - Probiotics - English MONOGRAFIA HEALTH CANADA - 0Documento25 pagineMono - Probiotics - English MONOGRAFIA HEALTH CANADA - 0Farhan aliNessuna valutazione finora
- MMH Dan StoringDocumento13 pagineMMH Dan Storingfilza100% (1)
- Service: Audi A6 1998Documento256 pagineService: Audi A6 1998Kovács EndreNessuna valutazione finora
- What Is Chemical EngineeringDocumento4 pagineWhat Is Chemical EngineeringgersonNessuna valutazione finora
- Assessment (L4) : Case Analysis: Managerial EconomicsDocumento4 pagineAssessment (L4) : Case Analysis: Managerial EconomicsRocel DomingoNessuna valutazione finora
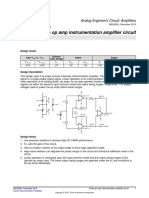
- Opamp TIDocumento5 pagineOpamp TIAmogh Gajaré100% (1)
- Rivalry and Central PlanningDocumento109 pagineRivalry and Central PlanningElias GarciaNessuna valutazione finora
- Amo Plan 2014Documento4 pagineAmo Plan 2014kaps2385Nessuna valutazione finora
- Project Final Report: Crop BreedingDocumento16 pagineProject Final Report: Crop BreedingAniket PatilNessuna valutazione finora
- TESTIS PHYSIOLOGY Spermatogenic Cell Syncytium Makela and Toppari 2018Documento10 pagineTESTIS PHYSIOLOGY Spermatogenic Cell Syncytium Makela and Toppari 2018LudimilaNessuna valutazione finora
- Citation GuideDocumento21 pagineCitation Guideapi-229102420Nessuna valutazione finora
- Online Music Courses With NifaDocumento5 pagineOnline Music Courses With NifagksamuraiNessuna valutazione finora